This article shows summary from researches, done with Vessel Simulation Tool on sea trials in 2013, where VeSim showed decent results. Much more work can be done regarding the validation of this simulation model, with the mentioned studies being a good place to start.
Discussion
Manoeuvring results compared with IMO MSC Res. 137(76)
The different manoeuvres described as the standards, e. g. the turning circle, zig-zag and stopping test manoeuvre, will be evaluated according to the IMO requirements described in Information about Vessel Manoeuvring based on IMO Standards“IMO Standard manoeuvring tests and criteria”.
Full-scale sea trials
The full-scale sea trial results are listed in tables Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Full-scale port turning circle results” and Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Full-scale starboard turning circle results” for the port and starboard turning circle, respectively, and in tables Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Full-scale zig-zag results” and Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Full-scale stopping test results” for the zig-zag and stopping test manoeuvre, respectively.
Table Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Full-scale port turning circle results” and Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Full-scale starboard turning circle results” shows that all the manoeuvre parameters are well within the requirements. As briefly discussed in Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Results”, the port manoeuvre, turning into the wind has larger turning circle parameters than the starboard manoeuvre, turning with the wind. In one way this is counter-intuitive, as one would expect that turning with the wind should give the vessel a boost, especially regarding the transfer and tactical diameter parameter when looking at picture Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Starboard turning circle with corrected trajectory before rotation”. But this is obviously not the case, as the two tables emphasizes. When correcting for current forces, the starboard parameters increase and the port parameters decrease, as was expected. In the case of this vessel, only these two turning tests were conducted. To check whether this was an occasional incident or in fact the turning abilities of the vessel are this different from starboard to port, more turning circle tests should be conducted. The repeatability of the tests would have to be addressed, e.g. if the identical tests conducted render similar results, i. e. if two turning circles to port render similar results.
For the zig-zag manoeuvres, given by table Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Full-scale zig-zag results”, the results are well within the required abilities. Results show that there is a fairly good compliance between the port and starboard tests, with a difference of about 28 % in the 2nd overshoot angle of the 10/10 manoeuvre as the largest. The difference between the other parameters are less than 5 % between the starboard and port manoeuvre. But as a study of repeatability, more identical tests should be conducted. Neither the turning circle manoeuvre nor the zig-zag manoeuvre were subjects of several identical tests.
The results of the only stopping test performed is listed in Table Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Full-scale stopping test results”. The test is not performed in the specified manner as described in the IMO regulations. This is because the specified manoeuvre can cause great engine strain and is of this reason avoided as much as possible. An alternative manoeuvre, utilizing the propeller pitch and RPM instead of reversing the engine to 100 % MCR, was performed. The results listed in table Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Full-scale stopping test results” cannot be compared with the requirements set by the IMO.
Simulated manoeuvres
The simulated IMO standard manoeuvres are listed in tables Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“Simulated turning circle results”, Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“Simulated 10/10 and 20/20 zig-zag results” and Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“Simulated stopping test results” for the turning circle, zig-zag and stopping test manoeuvre, respectively.
The results of the turning circle manoeuvre listed in Table Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“Simulated turning circle results” indicates that all the parameters of the manoeuvre are well within the requirements. The port and starboard manoeuvre varies in little degree, which can indicate that there is a minor error in the center line symmetry of the physical ShipX model or that the calculation method varies from port to starboard, albeit the manoeuvre should, in theory, be identical to both port and starboard. Although the initial results of the turning circle looks to be of satisfying validity, regarding the IMO requirements, there is a reason for concern regarding the simulation model when looking at the track plot of the manoeuvre. The track plot can be seen in Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“VeSim simulated manoeuvres”.
This illustrates that there is an overestimation of the turning ability of the vessel after obtaining a 180° change of heading. Instead of completing a full circle, the vessel seems to drift with a large yaw motion. This indicates that there is a miscalculation in the hydrodynamic coefficients affecting the straight line stability of the ship. As discussed in Basic Ship Motions and Mathematical Model used in Vessel Simulator (VeSim) Tool“HullVisc”, this may occur because of the fact that HullVisc uses a semi-empirical model to calculate the coefficients where the benchmark vessels are of older design and mostly based on offshore vessels. The turning circle parameters are within the IMO requirements, but because of the most likely incorrect calculation of hydrodynamic coefficients, the results should be evaluated with care.
The simulated zig-zag manoeuvre, presented in Table Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“Simulated 10/10 and 20/20 zig-zag results” are within the required abilities. From the results, it can be observed that the simulation model predicts almost identical overshoot angles for both the 1st and 2nd overshoot angle. The full-scale trials of the zig-zag manoeuvre have a tendency of smaller 2nd overshoot angles compared to the 1st, and this is not the case in the simulated manoeuvre. But, regarding the IMO requirements, the model predictions are of satisfactory result.
Simulation results compared with full-scale results
The following figures depict the percentage deviation of the simulated manoeuvres compared with the full-scale trials. The scale varies from 0 − 100 % where less than 100 % is underestimation and more than 100 % is overestimation, and consequently 200 % is equivalent to two times the value of the full-scale result.
Picture 1 depicts the percentage of how much the simulated turning circle manoeuvre differs from the full-scale sea trials, for both the original results and the results of correcting for the current forces as Figure a) and b), respectively.
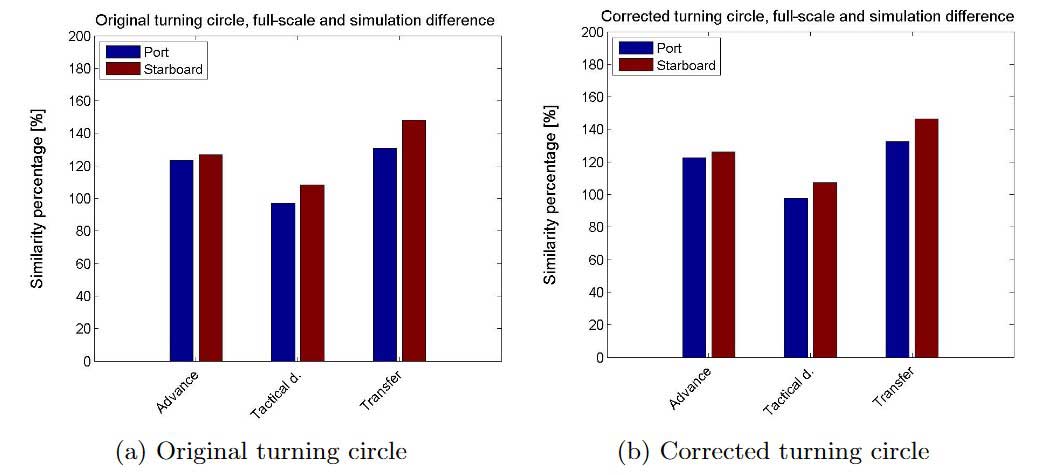
From the figures, the only parameter that is almost identical is the port tactical diameter, as it is fairly near 100 %. From the other parameters, it is clear that VeSim overestimates the results as discussed in Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“Turning circle manoeuvre”. The parameter that deviates the most from the full-scale trials is the transfer, which is about 50 % larger than the full-scale measurement. Correcting for current forces does not affect the results in a decisive manner as can be observed from the two figures. It can also be observed that the full-scale starboard manoeuvre has a tendency of having smaller values than to port, giving less overestimation of the simulation, as the simulated manoeuvres are more or less identical, as seen in Table Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“Simulated turning circle results”.
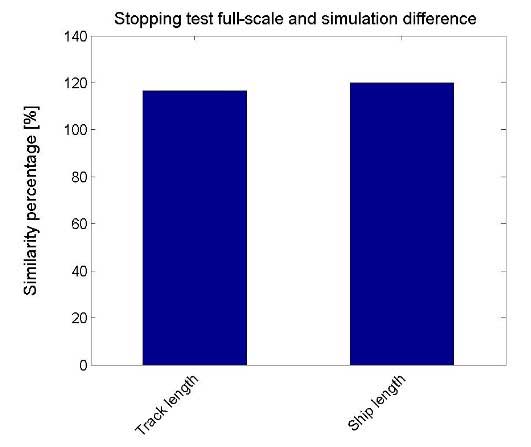
In Picture 2 the simulated stopping test is compared with the full-scale test. As the figure illustrates, the simulations are overestimated with approximately 20 % in both track length and ship length. This manoeuvre is quite different between the full-scale procedure and simulation procedure. This result must therefore be interpreted with care.
Picture 3 shows the comparison of the simulated and full-scale zig-zag manoeuvre, as how much the simulation differs from the full-scale trials.
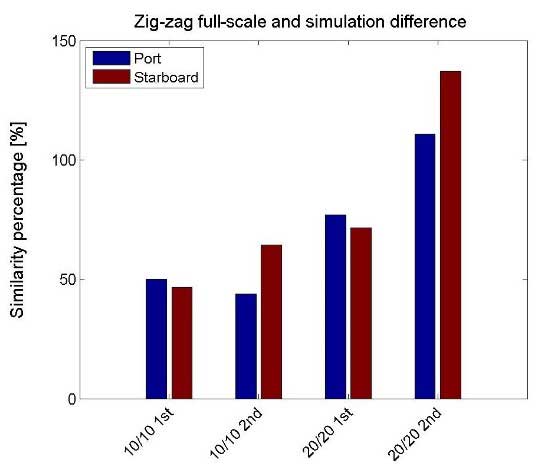
In this case, the simulation model underestimates the different overshoot angles, except for the 20/20 2nd overshoot angle, which is exceeded in the amount of almost 40 % to the star- board side and only 10 % to the port side. The clear difference between starboard and port can also be seen in the 10/10 manoeuvre for the 2nd overshoot, where the starboard overshoot angle is quite smaller than what measured to port, hence the larger difference to starboard, albeit the simulation is underestimated in this particular manoeuvre. The reason for the larger difference to starboard than to port has its origin in the full-scale trials as seen in Table Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations Project“Full-scale zig-zag results”.
Here, the 1st over-shoot angle to starboard and port differs with almost 40 % and the 2nd overshoot angle to starboard and port differs with approximately 20 %. The simulated zig-zag manoeuvres are however, quite stable regarding the similarity of the starboard and port manoeuvres. Although, there are almost no difference in the 10/10 and 20/20 overshoot angles, which may seem to be incorrect according to the full-scale test results.
The thruster turning differences in simulation and full-scale are illustrated in Picture 4.
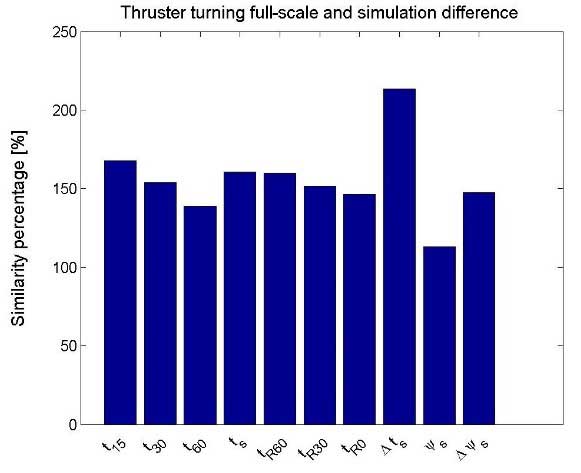
As the previous illustrations, this too differs in the sense of over- or underestimation of simulated results. It can be observed that the simulation model is overestimating the parameters in a fairly equivalent amount. The simulation results are about 50 % larger than that of the full-scale results, except for the overshoot time (∆ts) and the overshoot angle (ψs) which are significantly higher and lower than 50 %, respectively. The equivalent overestimations may indicate that the model is stable, but calculates incorrect horizontal stability, with the calculated HullVisc coefficients in mind.
The illustration of the accelerating turn simulation and full-scale difference is given in Picture 5.
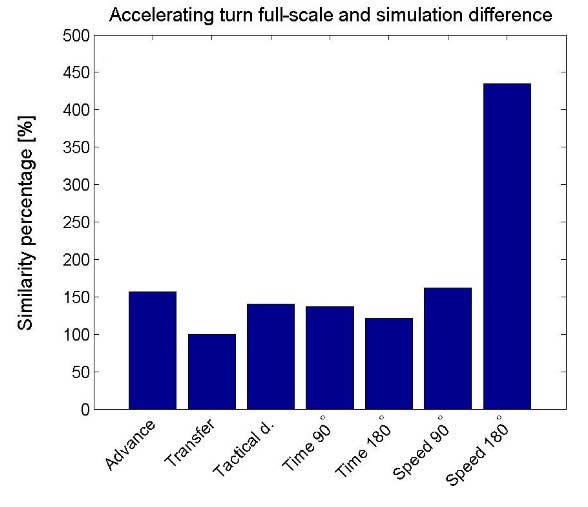
An equivalent magnitude of overestimation can also be seen in this manoeuvre. The parameters are all in the amount of about 50 % larger than the full-scale results, except for the speed at 180° heading change and transfer, which are overestimated in an extreme magnitude and 100 % identical to the full-scale results, respectively. The simulation model seems to be stable, neglecting the possible error source of hydrodynamic performance.
Influencing parameters in VeSim and error sources
The simulated manoeuvres are as described and illustrated, deviating in a varying extent from the full-scale trial measurements. The magnitude of the deviation differs for each manoeuvre, where the zig-zag manoeuvre parameters are fairly underestimated, and in the other manoeuvres as turning circle, thruster turning and accelerating turn, are overestimated. The main reason for this is believed to originate from the invalid calculation of the hydrodynamic coefficients by HullVisc, as it is based upon regression analysis and semi-empirical calculations.
Other influencing parameters that may lead to incorrect simulations may be the disparities that occur between port and starboard manoeuvres in the full-scale trials. This of course, does not affect the simulation model, but may lead to misjudgement of the model when comparing simulated and full-scale results. Albeit, this is not the case for the simulations performed, as they are quite off, regardless of the disparity of the full-scale measurements.
The calculation of propeller and rudder forces in the simulation model may influence the result. The propeller and rudder arrangement for MF Landegode can be viewed in Simulation of the Full-Scale Sea Trials from the Marine Activities and Offshore Operations ProjectShip specifications: MF Landegode. his arrangement is one of Rolls-Royce’s integrated propeller and rudder systems that may offer effects that may not be covered by the mathematical model used for the calculation of propeller and rudder forces listed in Basic Ship Motions and Mathematical Model used in Vessel Simulator (VeSim) Tool“Vessel Model (VeSim)”.
Regarding the low speed manoeuvres, e. i. the thruster turn and accelerating turn manoeuvre, wind is an important parameter. The simulations are carried out with no wind, but this is not possible for the full-scale trials. Although the wind speed was low at the day of the full-scale low speed manoeuvres, see Table Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“Simulated turning circle results”, the vessel was in fact affected by it, resulting in simulation results that differ from the full-scale results. This effect has however been assumed to be of little importance as this is not the main source of prediction error.
Another source of miscalculation of the manoeuvre may lie within the mathematical model being unable to capture effects of ship behaviour and environments encountered in manoeuvring.
Verification and validation of the model
The difference between the full-scale and simulated manoeuvres give a clear indication of the simulations being overestimated in most cases. The simulation model present stable results, which indicate that the model is of desired validity. The error however, may be in the estimation of the hydrodynamic coefficients. PMM tests with a scaled model of Landegode has been conducted at MARINTEK. The results of these tests were not ready when the thesis was written. Using the calculated hydrodynamic coefficients from the PMM tests should give a more detailed indication of the validity of the coefficients calculated by HullVisc, and whether or not VeSim is a suitable simulation model for MF Landegode. In addition to using PMM coefficients, the simulations could be performed in a time domain simulation giving the user the opportunity to change the pitch and RPM throughout the manoeuvre, as in the full-scale trials. This may also improve the result of the simulation model. VeSim is, according to the results, a valid simulation tool in some degree, keeping in mind the possibility of future correction of the hydrodynamic coefficients. By studying the affect of the coefficients, more satisfying results would hopefully be obtained and a more tangible decision on the validity of the model could be made.
Summary and conclusion
Developing regulations for improving safety at sea has been a concern since international trading became a reality. The International Maritime Organization (IMO) has become the international adopted treaty which regulates the manoeuvring performance of ships to maintain the safety, security and preventing marine pollution at sea. The IMO has established three standard manoeuvring tests for vessels with lengths larger than L ≥ 100 m to evaluate the performance of the vessel. This is the turning circle, zig-zag and stopping test manoeuvre. Requirements are provided for each individual manoeuvre to be fulfilled. In addition to the IMO performance tests, additional manoeuvres to be evaluated has been listed from different organizations.
When designing a ship, early estimations of the manoeuvring performance is an essential part, and simulation models are therefore a critical tool. With a simulation model that can predict these characteristics based upon the main dimensions of the vessel, alterations and modifications can be made in an early design stage, and mission-related requirements can be tweaked for better performance. It is therefore important to have a validated simulation model predicting trustworthy calculations and performance characteristics.
A computer model of the case vessel, MF Landegode, has been provided by MARINTEK and adopted into the simulation model. The simulation model developed by MARINTEK, Vessel Simulator (VeSim), is a time domain simulation tool. The simulation model consists of two main pre-processors called HullVisc and VeRes, calculating the hydrodynamic coefficients, and forces and motions in the frequency domain, respectively. A flowchart of the structure of VeSim is illustrated in Picture Basic Ship Motions and Mathematical Model used in Vessel Simulator (VeSim) Tool“Flowchart of VeSim structure”, followed by a more detailed description of the different pre-processors and the mathematical models that have been used.
A set of full-scale trial data has been provided and processed for comparison with the simulated manoeuvres. The sea trials were conducted on the 29th, 30th and 31st of August 2013. The standard IMO performance tests and additional low speed manoeuvres were conducted and measured with equipment fitted to the vessel during the manoeuvres. The analysis of the trials, test conditions and the different manoeuvres analysed have been presented. Tables and figures illustrate the manoeuvres and the results obtained from each test. The results show that the IMO standard manoeuvres are within the required abilities set for each specific manoeuvre. The stopping test is, however not conducted as specified in the IMO regulations, but altered to save the engine from too much strain. The altered test cannot, from this reason, be compared with the IMO regulations.
The calm water simulations were carried out using the simulation model which has been described. The standard IMO manoeuvres were carried out using the simulation plug-in for calm water, which enables the user to choose from different pre-determined tests as Picture Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“List of available manoeuvres in the calm water simulation model” illustrates. The low speed manoeuvres were carried out by using the described manual time domain simulation model and illustrated by Picture Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“Scenario manager in the time domain simulator”.
All the IMO standard manoeuvres were well within the requirements. Even though the turning circle manoeuvre was within the requirements, the ship’s track plot given in Real Example of Vessel Manoeuvering done with Vessel Simulator (VeSim)“VeSim simulated manoeuvres” clearly illustrates that the prediction is flawed and that there is an aberration in the straight line stability of the vessel. This give rise to the most conceivable cause of error, that the hydrodynamic coefficients are spurious due to the fact that they are based upon a semi-empirical calculation with benchmark vessels of older design. The comparison between the full-scale trials and simulated manoeuvres give a clear indication of over- and underestimation of the simulated manoeuvres in the range of 20 − 50 % as an average value. This is also the case for the low speed manoeuvres.
The simulation model used is believed to be of satisfying validity, emphasizing the aberration in the HullVisc calculations and that this should be studied in detail before making a firm conclusion on whether or not to use VeSim as a validated simulation model. I. e. further investigation related to the hydrodynamic coefficients, especially with regard to PMM tests, should be conducted and implemented in the validation of this simulation model.
Recommendations for further work
For a more complete and reliable validated model, further work and study is necessary, especially regarding the validity of the hydrodynamic coefficients and the affect of these. There are conducted PMM tests with a scaled model of MF Landegode at MARINTEK. These were not analysed during the time of preparation for this thesis, but should be available during the autumn of 2014. The coefficients from the PMM tests should give a better indication on the validity of the HullVisc coefficients. A more detailed study of other means of calculating the hydrodynamic coefficients could be conducted to address this issue more thoroughly, and to have a more tangible perspective of the affect of the hydrodynamic coefficients.
In addition, more full-scale tests could be conducted to address the issue of repeating the manoeuvres and obtaining matching or similar results for each test to both starboard and port.
To address the low speed manoeuvres more accurately, an individual study of these manoeuvres and obtaining a more applicable simulation model with regard to wind forces, change of propeller pitch and RPM throughout the manoeuvre should be conducted. A study of the affect of changing the propeller pitch and RPM should in addition to low speed manoeuvres be performed on the IMO standard manoeuvres as well.