В современной науке и технике гидродинамика судна занимает одно из ключевых мест при проектировании, строительстве и эксплуатации морских и речных транспортных средств. Исследование закономерностей движения судна в водной среде, анализ сил и моментов, возникающих при этом взаимодействии, а также разработка методов оптимизации гидродинамических характеристик являются важнейшими задачами судостроения.
Понимание принципов гидродинамики позволяет повысить энергоэффективность судна, улучшить маневренность и мореходные качества, а также обеспечить безопасность плавания в различных условиях.
Гидродинамические характеристики корпуса судна
При движении в режиме установившейся циркуляции все силы и моменты, действующие на корпус судна, за исключением центробежной силы массы корпуса, гидродинамического происхождения, т. е. являются результатом действия нормальных и касательных гидродинамических сил, распределенных по поверхности корпуса.
Как определить гидродинамические характеристики корпуса судна?
ГДХ корпуса зависят от формы обводов, соотношения главных размерений, кинематических параметров движения:
- дрейфа;
- кривизны траектории;
- крена;
- скорости и т. д.
ГДХ корпуса включает в себя составляющие, обусловленные как вязкостью, так и инерционностью воды.
Инерционные составляющие определяются расчетным способом. Вязкостные составляющие наиболее достоверно могут быть найдены путем проведения испытаний в опытовом бассейне. Испытания моделей судов ГДХ или натурных судов проводятся в зависимости от их габаритов. Как правило, определение ГДХ корпуса использует 2-3-метровые модели, однако имеющиеся в настоящее время экспериментальные установки позволяют провести испытания и с 8-метровыми моделями.
Другим способом определения вязкостных составляющих является расчетный, который, в свою очередь, может быть основан как на теоретической схеме обтекания корпуса, так и на результатах систематических испытаний серии моделей.
Для выполнения расчетов по определению Управляемость и инерционные характеристики судна на мелководье и в узкостихарактеристики управляемости необходимо знать следующие ГДХ корпуса:
- боковую силу;
- момент, действующий в плоскости ватерлинии (момент рыскания), или точку приложения боковой силы (плечо) по длине;
- момент, действующий в плоскости шпангоута (момент крена), или точку приложения боковой силы (плечо) по высоте.
При установившейся циркуляции для всех судов независимо от режима плавания боковая сила, обусловленная инерционностью корпуса (т. е. центробежная сила), определяется по формуле:
ГДХ корпуса судна, движущегося в водоизмещающем режиме
Расчет управляемости водоизмещающих судов представляет боковую силу и момент рыскания следующим образом:
где:
- v – скорость движения центра масс судна;
- FD – приведенная площадь погруженной части ДП судна,
- σD – приведенный коэффициент погруженной части ДП судна (см. формулу 12);
– безразмерные коэффициенты боковой силы и момента рыскания, определяемые при FrL ≤ 0,3 по формулам:
где:
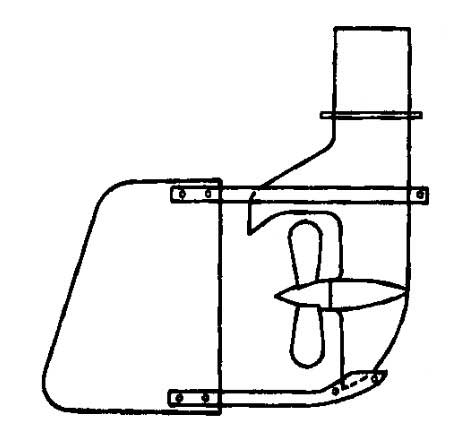
- Fп – площадь кормового подзора, т. е. площадь фигуры, дополняющей контур кормовой погруженной части до прямоугольника (рис. 2);
- величина Fп определяется планиметрированием;
- i – номер теоретического шпангоута, соответствующего для судов с кормовым дейдвудом пограничному между шпангоутами U-образной и V-образной формы (рис. 2, а), для судов без дейдвуда первому с кормы шпангоуту, касающемуся основной линии (рис. 2, б);
- ψ1 – построечный (стояночный) угол дифферента судна, определяемый по формуле:
Демпфирующая производная
обусловлена инерционной составляющей корпуса Yи, определяемой по формуле 1.
- ψ1 > 0 – при дифференте на корму;
- ψ1 < 0 – при дифференте на нос [Формула 13 учитывает случай, при котором судно имеет уклон килевой линии (см. рис. 3)];
- ψ2 – угол ходового дифферента (при FrL < 0,3; ψ2 = 0).

а – судно с дейдвудом; б – судно без дейдвуда
В случае отсутствия у судна кормового подзора (глиссирующие суда) σD – определяется по формуле:

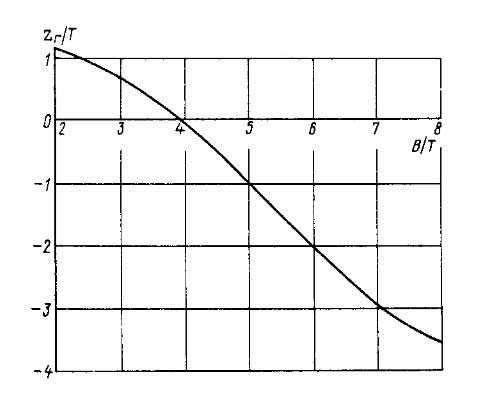
Точка приложения боковой силы по высоте (ордината), выраженная в долях осадки zr/Т, определяется по графику в зависимости от отношения В/Т (рис. 4). При посадке судна с дифферентом или при наличии уклона килевой линии под параметром Т понимается:
Формулы 5-12, а также зависимость для zr/Т (см. рис. 4) получены для круглоскулых судов. Они могут быть использованы и для приближенного расчета ГДХ корпуса остроскулых (глиссирующих) судов, движущихся в водоизмещающем режиме.
При движении с FrL > 0,3 у судна появляется угол ходового дифферента, который может быть найден по данным расчета ходкости. При отсутствии таковых величина ψ2 определяется по формуле:
где:
– безразмерное отстояние центра масс от миделя;
– смещение центра масс в нос от миделя;
– смещение центра масс в корму от миделя.
Область применения формул 5-12 и 16 ограничивается FrL ≤ 0,6, ориентировочно соответствующим началу переходного режима движения.
Это интересно: Проверки перед маневрированием
При 0,6 < FrL < 1 ГДХ корпуса становятся существенно нелинейными функциями FrL. Причем влияние FrL на ГДХ корпуса сложным образом связано с влиянием таких геометрических характеристик, как удлинение корпуса, угол килеватости, соотношение максимальной ширины корпуса к ширине на транце, положение центра тяжести по длине (центровки), удельной нагрузки и т. д.
В связи с этим для судов, движущихся в переходном режиме, отсутствуют аналитические зависимости ГДХ судов, связывающие безразмерные ГДХ корпуса с геометрическими характеристиками и кинематическими параметрами и аналогичные (Формулы 5-12).
ГДХ корпуса судна, движущегося в режиме глиссирования
В качестве основных исходных геометрических характеристик корпуса, когда расчитывается управляемость судна, движущегося в режиме глиссирования, принимаются:
- угол ходового дифферента ψ2;;
- смоченная длина lсм;
- осадка на транце Tтр;
- ширина на транце Bтр;
- угол килеватости β и положение центра масс относительно транца xтр (рис. 5).

Параметры ψ2 и lсм должны быть определены либо на основании расчета ходкости, либо замерены экспериментально. Осадка на транце определяется из соотношения:
При движении судна в режиме глиссирования с FrL > 1 составляющие ГДХ корпуса, необходимые для расчета управляемости, в соответствии с методикой, предложенной С. Б. Соловьем, определяются следующим образом:
позиционная производная боковой силы:
где:
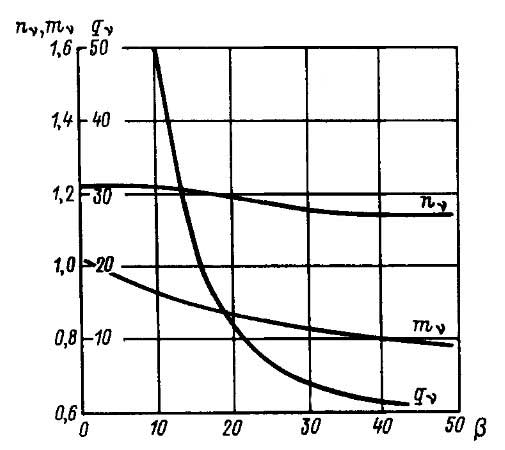
- nv – коэффициент, учитывающий влияние угла килеватости, (рис. 6);
плечо позиционной составляющей силы по длине:
демпфирующая производная инерционной (центробежной) силы корпуса:
плечо демпфирующей составляющей силы по длине:
плечи позиционных составляющих сил, обусловленных дрейфом и креном соответственно,
где:
- mv – коэффициент, учитывающий влияние килеватости (см. рис. 6);
В формулах 19, 21 величина xт < 0.






Помешан на научном прогрессе. В вашей статье узнал что кормовой подзор самая эффективное решение гидродинамики водоизмещающего корпуса и эта гидродинамика зависит еще и от особенностей этого самого подзора. Правда все это я просто от балды решил 40 лет назад, а эффективность и скорость передвижения зависит еще от одного параметра столь же важного как и подзор.