Винто-рулевой комплекс судов не обеспечивает их необходимую маневренность при движении на малых скоростях. Поэтому на многих судах для улучшения маневренных характеристик используются средства активного управления, которые позволяют создавать силу тяги в направлениях, отличных от направления диаметральной плоскости судна. К ним относятся: активные рули, подруливающие устройства, поворотные винтовые колонки и раздельные поворотные насадки.
Активный руль – это руль с установленным на нем вспомогательным винтом, расположенным на задней кромке пера руля (рис. 1). В перо руля встроен электродвигатель, приводящий во вращение гребной винт, который для защиты от повреждений помещен в насадку. За счет поворота пера руля вместе с гребным винтом на определенный угол возникает поперечный упор, обусловливающий поворот судна. Активный руль используется на малых скоростях до 5 узлов. При маневрировании на стесненных акваториях активный руль может использоваться в качестве основного движителя, что обеспечивает высокие маневренные качества судна. При больших скоростях винт активного руля отключается, и перекладка руля осуществляется в обычном режиме.

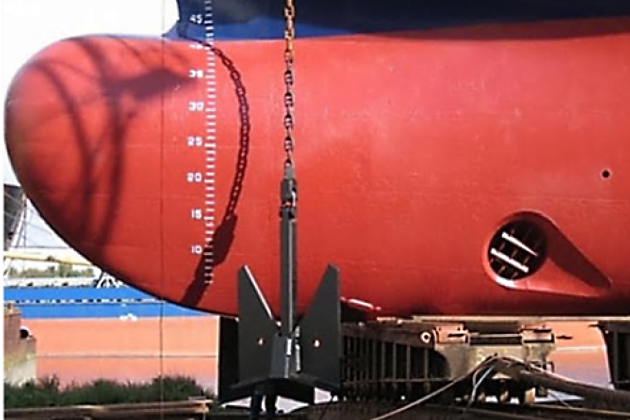
Раздельные поворотные насадки (рис. 2). Поворотная насадка – это стальное кольцо, профиль которого представляет элемент крыла. Площадь входного отверстия насадки больше площади выходного. Гребной винт располагается в наиболее узком ее сечении. Поворотная насадка устанавливается на баллере и поворачивается до 40° на каждый борт, заменяя руль. Раздельные поворотные насадки установлены на многих транспортных судах, главным образом речных и смешанного плавания, и обеспечивают их высокие маневренные характеристики.

Подруливающие устройства (рис. 3). Необходимость создания эффективных средств управления носовой оконечностью судна привела к оборудованию судов подруливающими устройствами. ПУ создают силу тяги в направлении, перпендикулярном диаметральной плоскости судна независимо от работы главных движителей и рулевого устройства.

Подруливающими устройствами оборудовано большое количество судов самого разного назначения. В сочетании с винтом и рулем ПУ обеспечивает высокую маневренность судна, возможность разворота на месте при отсутствии хода, отход или подход к причалу практически лагом. Использование подруливающих устройств эффективно до скорости судна 4-5 узлов.
Общие сведения об AZIPOD
В свое время получила распространение электродвижущаяся система AZIPOD (Azimuthing Electric Propulsion Drive), которая включает в себя дизель-генератор, электромотор и винт (рис. 4).

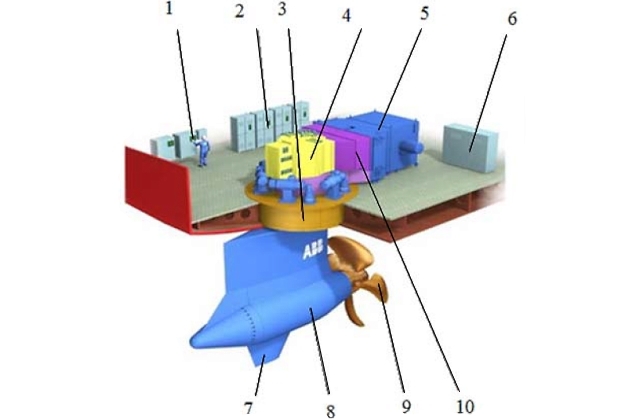
1 – панель управления; 2 – трансформаторы; 3 – рулевой модуль; 4 – блок контактных колец; 5 – установка охлаждения; 6 – распределительный щит; 7 – стабилизатор; 8 – движительный модуль с электродвигателем внутри; 9 – гребной винт; 10 – воздухопровод
AZIPOD (от англ. – azimuth (азимутальный) и pod (стручок) или азимутальный электрический Погруженный гребной Двигатель (АЗИПОД) является брендом шведско-швейцарской компании «ABB» (Asea Brown Boveri Ltd.) и представляет собой размещенный в гондоле главный электрический движитель и рулевой механизм, приводящий в движение винт фиксированного шага с различными скоростными режимами.
Принцип действия движителя AZIPOD
Винто-рулевая колонка AZIPOD состоит из высокомоментного электродвигателя, расположенного в отдельном корпусе – поде (рис. 5).

Гребной винт установлен непосредственно на валу электродвигателя, что позволило передавать вращающий момент с двигателя непосредственно на винт, минуя промежуточные валы или редукторы. Электроэнергия для AZIPOD подается от судовой электростанцииСудовые электростанции на буксирных судах с помощью гибких кабелей. Отказ от промежуточных элементов пропульсивной системы позволил исключить потери энергии, возникающие в них при передаче энергии с вала двигателя на винт.
Предлагается к прочтению: Влияние гребного винта регулируемого шага (ВРШ) и руля на управляемость судна
Установка закреплена вне корпуса судна с помощью шарнирного механизма и может вращаться вокруг вертикальной оси на 360°, что позволяет получить лучшую маневренность судна как по курсу, так и по скорости по сравнению с обычными движительными установками. Система поворота – гидравлическая.
Модификации модулей «AZIPOD», их обозначения и установка на разных типах судов
Компанией АВВ создано несколько типов модулей AZIPOD, различающихся между собой по следующим признакам:
- виду;
- предполагаемой среде использования;
- диаметру гребного двигателя;
- длине гребного двигателя;
- типу гребного двигателя.
Каждому модулю присваивается свой код, который несёт в себе вышеизложенную информацию. Код формируется по следующей схеме (рис. 6):
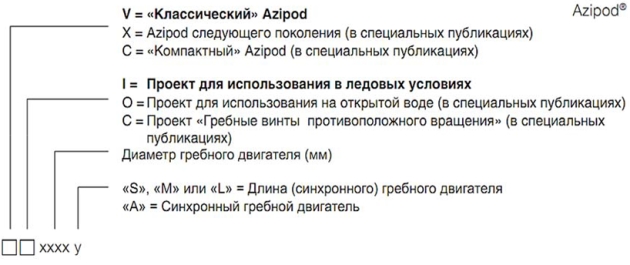
Например, код модуля «AZIPOD® VI 1600 A» означает AZIPOD для использования во льдах с мощностью на валу в нижних пределах диапазона мощности (например, 5 МВт), построенный с асинхронным гребным двигателем.
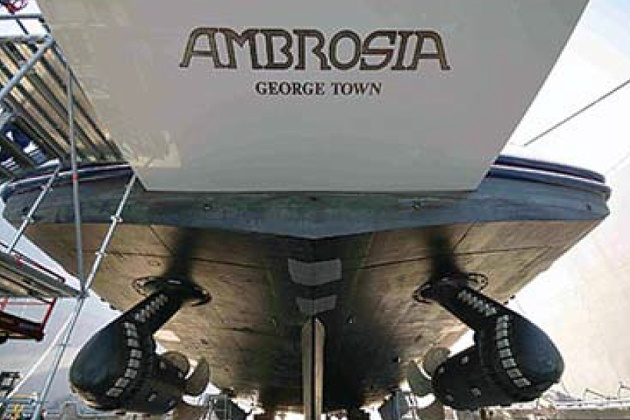
Далее представлены примеры некоторых модулей AZIPOD и способы их установки на различных судах (рис. 7–11):




Основные преимущества и недостатки комплексов AZIPOD
Основными преимуществами движителя AZIPOD являются:
- Сочетание в себе нескольких функций одновременно. Она одновременно является двигателем, движителем и средством управляемости судна.
- Повышенная маневренность в тяжелых ледовых условиях. Возможность поворота на 360° обеспечивает полный крутящий момент и тягу в любом направлении, полный крутящий момент доступен даже при остановке гребного винта и при реверсировании.
- Прочная механическая конструкция. Один короткий вал и отсутствие конических зубчатых передач означает, что максимальный крутящий момент электрического двигателя может быть полностью использован без механических ограничений.
- Прочность и жесткость. Корпус AZIPOD с рамной конструкцией и короткий жесткий валопровод выдерживают резкие изменения тяги и высокие ударные нагрузки во время дробления льда.
- Свобода при проектировании судов. AZIPOD обеспечивает высокую проектную гибкость и возможность разработки судов с отличными эксплуатационными характеристиками как для операции во льдах так и на открытой воде.
- Экономия топлива на 15 %.
- Возможность судна двигаться во льдах кормой вперед. При этом движении происходит существенное снижении требуемой мощности. Обычно танкер, требующий мощность 10 МВт при движении в открытой воде будет требовать установленной мощности в 20 МВт для движения во льдах носом вперед. Если же его конструкция будет предусматривать движение во льдах кормой вперед, требуемая мощность будет снижена до 12 МВт.
- Простота силовой передачи. В то время как механические движители имеют сложную трансмиссию с зубчатыми колесами и валами, AZIPOD имеет только электрические кабели между источником электрического питания и электродвигателем. Это позволяет построить крайне прочное гребное устройство, объединяющее в себе простоту, прочность и надежность для наиболее сложных ледовых условий и судов любого ледового класса.
- Экономность. Эта установка не только оптимально размещает весь винторулевой комплекс в подводной части судна, но и значительно упрощает компоновку машинного отделения обслуживающими системами и механизмами. Исходя из этого, удалось сократить размеры машинного отделения, стоимость постройки, а также упростить ряд технологических операций.
- Соответствие требованиям. Новая компактная установка AZIPOD спроектирована так, чтобы удовлетворить все предъявляемые требования по обеспечению маневренности с возможностью работы в диапазоне мощностей от 400 кВт до 5 МВт. При этом выдерживаются требования экономической целесообразности применения на небольших типах судов.
- Плавное изменение скорости. Применение частотного преобразователя энергии позволяет плавно изменять скорость, а также обеспечивать контроль крутящего момента.
- Небольшой диаметр винта. Удалось уменьшить внешний диаметр гребного винта, сохранив все его гидродинамические характеристики.
- Высокая пропульсивная эффективность. Работа всех устройств и механизмов имеет низкую шумность и вибрацию.
- Модернизация конструкции. Усовершенствование конструкции электродвигателя позволило значительно сократить потери мощности, а также эффективно применить систему охлаждения. Наиболее оптимальным стало использование воды в качестве охлаждающей среды.
- Система контроля. Она позволяет постоянно контролировать скорость двигателя, держа угол атаки винта в заданном режиме работы, и не превышать предельно допустимых значений. Частота вращения винта может изменяться путем регулировки уровня тока, подаваемого на электродвигатель. Сам электропривод низковольтный, рассчитан на напряжение 690 В.
Основными недостатками комплекса AZIPOD являются высокая стоимость установки и трудность ремонта в рейсе.
Система управления AZIPOD
Установки AZIPOD применяются на контейнеровозахСпециализированные суда для перевозки сухих грузов, балкерах, пассажирских судах и т. д. В подавляющем большинстве это достаточно крупные суда. Немаловажным фактором является большая возможность использовать пропульсивные установки AZIPOD для ледоколов и судов ледового плавания.
Читайте также: Влияние гребного винта фиксированного шага (ВФШ) и руля на управляемость судна
Один из примеров использования AZIPOD – танкер двойного действия (рис. 12), который на открытой воде двигается как обычное судно, а во льдах двигается кормой вперёд как ледокол, для чего кормовая часть такого судна оснащена ледовым подкреплением для ломки льда.

Современные суда ледового плавания, как правило, имеют навигационный мостик закрытого типа во всю ширину судна. Две консоли управления модулями AZIPOD расположены в центре мостика (в передней части для управления судном при движении вперёд и в задней части при движении кормой вперёд) и по одной на каждом их крыльев (рис. 13).

1 – кормовая и 2 – носовая часть мостика
Консоли, установленные на крыльях мостика, позволяют капитану одновременно управлять модулями и контролировать окружающую обстановку у борта судна, например, во время таких сложных операций как швартовка к причалу, подход к которому затруднён из-за льда. Консоль управления, как правило, оборудована монитором рабочей станции, средствами связиМорская сигнализация и связь, телеграфом и джойстиками ручного управления движителями AZIPOD (рис. 14).

С помощью джойстиков (рис. 15) капитан может изменить скорость судна, увеличив или уменьшив количество оборотов движителей маленькой рукояткой (телеграфом), и установить необходимый угол поворота движительных модулей для изменения направления тяги винтов, повернув джойстик вокруг своей оси.

Положение модулей также контролируется на специальных индикаторах возле джойстиков.

- Антонов В. А. Теоретические вопросы управления судном. – Владивосток: Изд-во Дальневост. гос. университета, 1988. − 112 с.
- Алексеюк В. В., Литвиненко А. И., Цурбан А. И. Морская практика для матроса. М.: Транспорт, 1970. − 272 с.
- Алексеев Л. Л. Практическое пособие по управлению морским судном. СПб.: − ЗАО ЦНИИМФ, 1996. − 118 с.
- Арпиайнен А. И., Чубаков К. Н. Азбука ледового плавания. − М.: Транспорт, 1987.
- Баранов Ю. К., Лесков М. М. и др. Сборник задач по использованию радиолокатора для предупреждения столкновений судов.− 4-е изд. − М.: Транспорт, 1989. − 96 с.
- Безопасность плавания во льдах. Под ред. А. П. Смирнова. − М.: Транспорт, 1993.
- Боровлев Е. М. Матрос 1 класса. – Одесса: Изд-во «Optimum», 2005. – 514 с.
- Бурлаков С. В., Либензон М. Н., Письменный М. Н. Якорная стоянка судов на открытых рейдах. М.: Транспорт, 1968. – 136 с.
- Бурханов М.В. Справочник штурмана. Справочное издание.– М.: «Моркнига», 2008. – 560 с.
- Витченко А. Г. Морское дело. М.: Легкая и пищевая промышленность, 1984. – 288 с.
- Выбор безопасных скоростей и курсовых углов при штормовом плавании судна на попутном волнении. РД 31.00.57.2-91.
- Ганнесен В. В. Борьба за живучесть судна. Уч. пос. − Владивосток: Дальрыбвтуз, 2005. – 102 с.
- Ганнесен В. В. Судовые спасательные средства. Уч. пос. Владивосток: Дальрыбвтуз, 2006. − 101 с.
- Генри Х. Хойер. Управление крупнотоннажными судами при маневрировании. Пер. с англ. М.: 1987. – 109 с.
- Дамаскин A. M., Крысак М. С. Учебное пособие для матроса и боцмана. М.: Транспорт, 1975. − 272 с.
- Дидык А. Д., Усов В. Д., Титов Р. Ю. Управление судном и его техническая эксплуатация. М.: Транспорт, 1990. – 320 с.
- Дунаевский Я. И. Снятие судов с мели. 2-е изд. М.: Транспорт, 1984. − 168 с.
- Железный Г. М., Задорожный А. И., Щербак В. Н. Что должен знать судоводитель. Одесса: КП ОГТ, 2005. – 444 с.
- Железный Г. М., Задорожный А. И. Эксплуатация танкеров и балкеров. − Одесса: КП ОГТ, 2005. – 356 с.
- Жуков Е. И., Либензон М. Н. и др. Управление судом и его техническая эксплуатация. Под ред. А. И. Щетининой. 3-е изд. М.: Транспорт, 1983. – 655 с.
- Замоткин А. П. Морская практика для матроса. 2-е изд. М.: Транспорт, 1993. – 256 с.
- Захаров А. В., Захарьян Р. Г. и др. Учебное пособие для подготовки по специальности «Матрос»/Под ред. А. В. Лихачева. 2-е изд. СПб.: ГМА им. адм. С. О. Макарова, 2000. – 124 с.
- Инструкция по безопасности морских буксировок/Утв. Федеральной службой морского флота России от 08.06.96. № МФ-35/1921.
- Казанский К. В., Филиппов И. Г. Штормование судов. М.: Транспорт, 1968. 112 с.
- Кацман Ф. М., Ершов А. А. Судоводителю о маневренных характеристиках судна: Учеб. Пос. СПб.: ГМА им. адм. С. О. Макарова, 2001.
- Кейхилл Р. А. Столкновения судов и их причины. М.: Транспорт, 1987.
- Климов Е. Р. Лекции по МППСС-72: (Части А и В): пособие для морских судоводителей – Архангельск: ОАО «ИПП «Правда Севера», 2012 – 328 с.
- Козырь Л. А., Аксютин Л. Р. Управление судами в шторм. М.: Транспорт,1973.-110 с.
- Конаков А. Г. Особенности работы на специализированных судах. Владивосток: Мор. гос. ун-т им. адм. Г. И. Невельского, 2011. – 358 с.
- Коккрофт А. Н., Ламейер Дж. Н. Ф. Руководство по правилам предупреждения столкновений/Пер. с англ. СПб.: ООО «Морсар», 2005 г.
- Корнараки В. А. Справочник лоцмана. – М.: Транспорт, 1983. – 48 с.
- Корнараки В. А. Маневрирование судов. М.: Транспорт, 1979. – 126 с.
- Косарин В. М., Попело В. М., Аносов Н. М. Обеспечение остойчивости, прочности корпуса и непотопляемости морского судна. – Владивосток: Мор. гос. ун-т им. адм.
Г. И. Невельского, 2004. – 191 с. - Кубачев Н. А., Кургузов С. С. и др. Рекомендации по использованию радиолокационной информации для предупреждения столкновений судов: Сб. задач по управлению судами. М.: Транспорт, 1984. − 140 с.
- Кузьмин В. В. Электронные картографические системы. – Новосибирск: НГАВТ, 2006. – 159 с.
- Лихачев А. В. Управление судном. СПб.: Изд-во Политехн. Ун-та, 2004, − 504 с.
- Макаров И. В. Морское дело. М.: Транспорт, 1989, – 288 с.
- Международная Конвенция по охране человеческой жизни на море 1974 года (СОЛАС-74). (Консолидированный текст, измененный Протоколом 1988 года к ней, с поправками), – СПб.: ЗАО “ЦНИИМФ”, 2010 г. – 992 с. International Convention for the Safety of Life at Sea, 1974, (SOLAS-74). (Text modified by the Protocol of 1988 relating thereto, including Amendments).
- Международный кодекс по спасательным средствам (Кодекс ЛСА) – 7-е изд., доп., – СПб.: ЗАО “ЦНИИМФ”, 2013 г. – 184 с. Серия «Судовладельцам и капитанам», выпуск 3. International Life-Saving Appliance Code (LSA Code) 2013.
- Международная Конвенция по предотвращению загрязнения с судов 1973г., измененная протоколом 1978 г. к ней (МАРПОЛ-73/78), Книги I и II, – СПб.: ЗАО “ЦНИИМФ”, 2012 г. – 762 с. International Convention for Prevention of Pollution from Ships (MARPOL-73/78).
- Международная Конвенция по предотвращению загрязнения с судов (МАРПОЛ- 73/78), Книга III, пересмотренное издание, – СПб.: ЗАО “ЦНИИМФ”, 2012 г. – 336 с. International Convention for Prevention of Pollution from Ships (MARPOL-73/78), Book III, revised edition.
- Международная Конвенция о подготовке и дипломировании моряков и несении вах- ты 1978 г. (ПДМНВ-78) с поправками (консолидированный текст), – СПб.: ЗАО “ЦНИИМФ”, 2010 г. – 806 с. International Convention on Standards of Training, Certification and Watchkeeping for Seafarers, 1978 (STCW-1978), as amended (consolidated text).
- Международный кодекс остойчивости судов в неповреждённом состоянии 2008 года (Кодекс ОСНС) (рез. MSC.267(85)) с поправками, – СПб.: ЗАО “ЦНИИМФ”, 2011 г. – 240 с. International Code on Intact Stability, 2008 (2008 IS Code), res. MSC.267(85) adopted on 04.12.2008, 2011 Edition.
- Международное авиационное и морское наставление по поиску и спасанию (Наставление ИАМСАР), книга III – «Подвижные средства», – СПб.: ЗАО “ЦНИИМФ”, 4-е издание, исправленное и дополненное, 2013 г. – 464 с. Серия «Судовладельцам и капитанам», выпуск 14. International Aeronautical and Maritime Search and Rescue Manual (IAMSAR Manual), vol. III – «Mobile Facilities».
- Международный кодекс по охране судов и портовых средств (Кодекс ОСПС), 2-е изд., исправленное и дополненное, – СПб.: ЗАО “ЦНИИМФ”, 2009 г. – 272 с. Серия «Судовладельцам и капитанам», выпуск 7. International Ship and Port Facility Security (ISPS) Code, 2nd edition, updated.
- МКУБ (рез.А.741(18) с поправками) и Руководство по внедрению МКУБ Администрациями (рез.А.1022(26)), – СПб.: ЗАО “ЦНИИМФ”, 2010 г. – 94 с.
- МППСС-72 (адм. № 9018), издание УНиО МО РФ, 2010 год.
- Международный свод сигналов МСС-65.
- Морское дело. Под ред. А. И. Щетининой. Л.:Транспорт, 1967. – 879 с.
- Морская практика. Под ред. И. И. Афанасьева. М.: Морской транспорт, 1952.
- Наставление по борьбе за живучесть судов – РД 31.60.14-81 (НБЖС с Приложениями и Дополнениями), – СПб.: ЗАО “ЦНИИМФ”, 2004 г. – 376 с., приложений 9, дополнений 6 (вкл. Цвета сигнальные и знаки безопасности). Серия «Судовладельцам и капитанам», выпуск 31. Manual on Emergency Plans in Ships.
- Общие правила плавания и стоянки судов в морских портах Российской Федерации и на подходах к ним. Приказ Минтранса России от 20 августа 2009 года, № 140.
- Письменный М. Н. Краткий курс по изучению МППСС: Владивосток, МГУ им. адм. Г. И. Невельского, 2003. − 42 с.
- Письменный М. Н. Подготовка вахтенного помощника капитана по управлению судном. Владивосток: Мор. гос. ун-т им. адм. Г.И. Невельского, 2003 г.
- Письменный М. Н. Конвенционная подготовка судоводителей морских судов. Владивосток: Мор. гос. ун-т им. адм. Г. И. Невельского, 2009 г. – 254 с.
- Пламмер К. Дж. Маневрирование судов в узкостях. Пер. с англ. Л.: Судостроение, 1986. – 80 с.
- Плявин Н. И., Шаповал М. А. и др. Морские перевозки наливных грузов. – М.: Транспорт, 1991. – 296 с.
- Песков Ю. А. Практическое пособие по использованию САРП. М.: Транспорт, 1995. – 224 с.
- Погосов С. Г. Швартовка крупнотоннажных судов. М.: Транспорт, 1975. − 176 с.
- Положение о порядке расследования аварий или инцидентов на море. 2013 год.
- Правила классификации и постройки судов. СПб, Российский морской регистр судоходства, 2012.
- Процедуры контроля судов государством порта 2011 года – резолюция A.1052(27) ИМО, – СПб.: ЗАО “ЦНИИМФ”, 2012 г. – 272 с. Серия «Судовладельцам и капитанам», выпуск 2. Procedures for Port State Control, 2011 (IMO resolution A.1052(27).
- Резолюция ИМО А.601(15). Представление на судах информации об их маневренных характеристиках.
- Снопков В. И. Управление судном. СПб, 2004 г.
- Теория и устройство судов. Под ред. Ф. М. Кацмана. Л.: Судостроение, 1991. − 416.
- Третьяк А. Г., Козырь Л. А. Практика управления морским судном. М.: Транспорт, 1988. − 112 с.
- Усов В. Д. МППСС-72 с разъяснениями, карточками для закрепления и контроля знаний и условными обозначениями. – Астрахань, ГП АО «Издательско-полиграфический комплекс «Волга»», 2012. – 224 с., цв. илл.
- Удалов В. И. Управление крупнотоннажными судами.– М.: Транспорт, 1986. – 229 с.
- Цурбан А. И., Оганов A. M. Швартовные операции морских судов. М.: Транспорт, 1987. – 176 с.
- Шарлай Г. Н., Пузачев А. Н. Оператор ГМССБ. Владивосток, Мор. гос. ун-т им. адм. Г. И. Невельского, 2008. – 351 с.
- Шарлай Г. Н. Основы системы управления безопасностью в соответствии с требованиями МКУБ. Владивосток, Мор. гос. ун-т им. адм. Г. И. Невельского, 2004. – 75.
- International Convention for Prevention Pollution from Ship’s (MARPOL−73/78). – London: IMO, 2011.
- The Mariners Handbook. – London: Hydrographer of the Navy, 2009.
- The Master’s Role in Collection Evidence. – London: Nautical Institute, 2012.
- The Mariner’s Role in Collecting Evidence.−London: The Nautical Institute, 2006. − 400 p.
- Bridge Procedures Guide. – London: International Chamber of Shipping, 2007.
- Bridge Watchkeeping. – London: International Chamber of Shipping, 2003.
- Buysse, Capt. J. – Handling Ships in Ice. A Practical Guide to Handling Class 1A and 1AS ships. London, Nautical Institute, 2007.
- Clark, I. C. – Mooring and Anchoring Ships Vol 1 – Principles and Practice. London, The Nautical Institute, 2009.
- Cockcroft, A. N. – A Guide to the Collision Avoidance Rules. 7th ed. Oxford: Elsevier Butterworth- Heinemann, 2012.
- Code of Safe Practice for Cargo Stowage and Securing. – London: IMO, 2003. – 109 p.
- Code of Safe Practice for Ships Carrying Timber Deck Cargoes, 2011. – 71 p.
- Code of Safe Practice for Solid Bulk Cargoes, 2012.
- Crude Oil Washing Systems. – London: IMO, 2000. – 88 p.
- ISBESTER, Capt. J. – Bulk Carrier Practice. 2nd ed. London, Nautical Institute, 2010.
- International Grain Code, 1992.
- International Convention on Load Lines, 2005.
- International Best Practices for Maritime Pilotage. – BIMCO. – 6 p.
- Frampton, R. and Uttridge, P. – Meteorology for Seafarers. 3rd ed. Glasgow, Brown, Son & Ferguson Ltd. 2008.
- House, D. J. – Ship Handling- Theory and Practice. Butterworth-Heinemann, 2007.
- House, Lloyd, Toomey & Dickens. – The Ice Navigation Manual. Witherby Seamanship International, 2009.
- Peril at Sea and Salvage: A Guide for Masters. 6th ed. London, Witherby & Co. Ltd., 2012.
- Swift A. J. Bridge Team Management. A Practical Guide. – London: The Nautical Institute, 2004. – 118 p.
- International Safety Guide for Oil Tankers & Terminals (ISGOTT), Fifth Edition. – Lon- don: WITHERBY and Co. Ltd., 2006. – 454 p.
- Mooring Equipment Guidelines, 3’d Edition. – London: Witherby Seamanship lntemat- lonal, 2008. – 288 p.
- Ship to Ship Transfer Guide (Petroleum), Fourth Edition. – London: International Chamber of Shipping, 2005. – 75 p.
- Clean Seas Guide for Oil Tankers, 4th Edition. – London: International Chamber of Ship- ping, 1994. – 28 p.
- Tank Cleaning Guide, Sixth Edition. – Rotterdam: Chemical Laboratories & Superintend- ence company, 1998. – 454 p.
- Robert L. Tallack. Commercial Management for Shipmasters. – London: The Nautical In- stitute, 1996. – 288 p.
- Vessel Inspection Questionnaire for Bulk Oil, Chemical Tankers and Gas Carries, Second Edition. – London: Oil Companies Marine Forum, 2000. – 240 p.
- A Guide to the Vetting Process, 10th Edition. – INTERTANKO, 2013. – 360 p.
- Effective Mooring. 3rd Edition. – London: Oil Companies Marine Forum, 2010. – 68 p.
- Rowe R. W. The Shiphandler’s Guide. – London: The Nautical Institute, 2000. – 172 p.
- Williamson, P. R. – Ship Manoeuvring Principles and Pilotage. London: Witherby & Co. Ltd., 2001.
- WITHERBY SEAMANSHIP INTERNATIONAL. – The Ice Navigation Manual. 2010.






Это правда, подобные установки по типу AZIPOD значительно облегчают управление судном для обеспечения его лучшей маневренности.