Рулевое устройство судна обеспечивает устойчивость и управляемость судна на спокойной воде и при сильном волнении. Устойчивость судна на курсе и влияние расположения гребного винта на работу руля – важные факторы, определяющие маневренность и безопасность плавания.
В статье приведены примеры и методы необходимых расчетов для определения гидродинамических сил. Полученные данные имеют важное значение при проектировании судовых систем управления, в частности, для определения оптимальных характеристик рулевой машины. Необходимо учитывать, какие силы действуют на рулевое устройство при волнении, чтобы обеспечить его надежную и эффективную работу в различных морских условиях. Практическое применение расчета гидродинамических сил руля позволяет предотвратить поломки, оптимизировать энергопотребление рулевого привода и повысить безопасность судовождения. Точные расчеты также способствуют увеличению срока службы рулевого устройства и снижению затрат на его обслуживание.
Определение гидродинамических сил и моментов, действующих на судовой руль
Расчет ГДХ руля необходим для выбора прочностных размеров Рулевые устройства судна. Дефектация и ремонтрулевого устройства и определения мощности рулевого привода (рулевой машины). В этом случае наиболее важной является информация о нормальной силе N, действующей на рулевое устройство судна, и моменте относительно баллера М.
Момент, преодолеваемый рулевым приводом, состоит из двух компонентов: момента гидродинамической природы и момента трения в подшипниках опор. Для приближенной оценки момент трения можно принимать как 20 % гидродинамического момента, более точно он может быть рассчитан в соответствии с формулами теории прочности. Методика расчета гидродинамических усилий для общего случая расположения руля за гребным винтом и корпусом судна имеет сложный характер, и ее изложение выходит за рамки настоящей статьи.
Однако для маломерных судов, для которых характерно использование относительно простой конструктивной схемы движительно-рулевого комплекса, указанная методика может быть упрощена. Ниже приводится приближенная методика, использование которой возможно при следующих допущениях:
- руль – подвесной (простой), близкий к прямоугольному, расположен по оси вращения гребного винта;
- значения высоты руля и диаметра ГВ близки друг другу;
- отстояние нижней кромки руля от продольной оси ГВ составляет a1 ≥ 0,5Rp, кавитация руля отсутствует (к ≥ 2,5).
Методика расчета
Гидродинамические усилия, действующие на рулевое устройство судна, рассчитываются для следующего условного маневра: судно движется прямолинейно передним ходом с рулем, переложенным на постоянный угол. При расчете последовательно определяется безразмерные гидродинамические характеристики изолированного руля, руля с учетом влияния корпуса, руля с учетом влияния ГВ и корпуса; производится расчет рулевого устройства, по действующим на него силы и моменты.
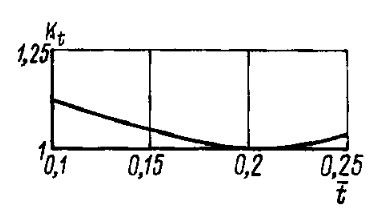
коэффициент центра давления руля:
где:
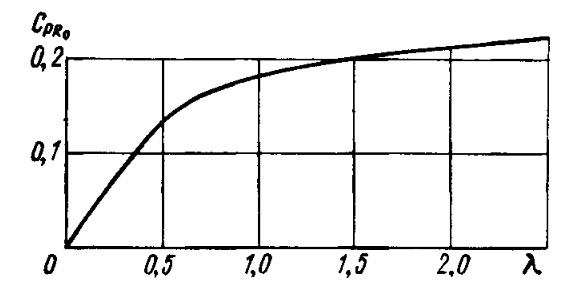
- CPλ – зависимость коэффициента центра давления от удлинения (рис. 1);
- Kt – поправочный коэффициент, учитывающий значение относительной толщины руля (рис. 2).

2 Определение безразмерных гидродинамических характеристик (ГДХ) руля, а именно учет влияния корпуса на гидродинамические силы рулевого устройства, производится исключительно в тех случаях, когда руль находится в кормовом подзоре судна, перемещающегося в водоизмещающем или переходном режиме. Для рулей, установленных под днищем судов, движущихся в глиссирующем или переходном режимах, безразмерные ГДХ с учетом влияния корпуса соответствуют безразмерным ГДХ изолированного руля.
где:
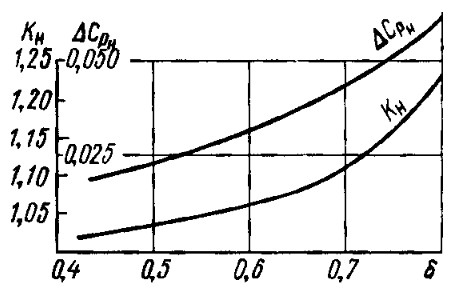
- KH – коэффициент влияния корпуса (рис. 3).
Коэффициент центра давления CPRH определяется по формуле:
где:
- ΔCPH – поправка к коэффициенту центра давления, обусловленная корпусом судна (см. рис. 3).
3 Безразмерные ГДХ руля с учетом влияния ГВ и корпуса.
Производная коэффициента нормальной силы
определяется по формуле:
где:
- Kи – коэффициент индукции ГВ (см. формулу Управляемость малого судна“Определение коэффициента индукции гребного винта”).
Коэффициент центра давления
определяют по формуле:
где:
- △CPR – поправка к коэффициенту центра давления, на которую влияет гребной винт.
Для определения поправки △CPR вычисляют эффективное удлинение руля:
где:
- – производная коэффициента подъемной силы руля, расположенного за ГВ и корпусом (см. формулу 24 в статье Управляемость малого судна“Влияние ГВ и корпуса на ГДX руля”).
Для полученных значений λэ определяют величины
и
(рис. 4) и далее их разность:
где:
- KδR – коэффициент компенсации.
4 Гидродинамические силы и моменты, действующие на рулевое устройство судна, определяются следующими выражениями:
где:
- νср – средняя скорость обтекания руля, определяемая формулами 32 и 33 в статье Управляемость малого судна“Влияние ГВ и корпуса на ГДX руля”.
Величина момента на баллере может регулироваться выбором коэффициента компенсации руля. При назначении коэффициента компенсации чрезмерно большим по сравнению с коэффициентом центра давления рулевое устройство судна получается перебалансированным, при противоположном соотношении коэффициента компенсации и коэффициента центра давления – недобалансированным (рис. 5).
Естественно, удовлетворительный вид зависимости M = f(δR) соответствует промежуточному положению.
При изменении коэффициента компенсации или при необходимости пересчета ГДХ с одного руля на другой однотипный компенсации коэффициент момента определяется по следующей формуле:
где:
- – измененный коэффициент компенсации.
При расчете по формуле 13 коэффициент нормальной силы
считается неизменным.
При рассмотрении вопросов управляемости данные по сопротивлению руля являются второстепенными по сравнению с другими гидродинамическими характеристиками.
Определенную практическую полезность с учетом ходкости имеет информация о сопротивлении непереложенного руля. Для рулей с закругленной передней кромкой и заостренной задней (например, профиль NASA) оно пренебрежимо мало по сравнению с сопротивлением корпуса. Однако для руля с клиновидным профилем указанная величина в 3-4 раза превышает сопротивление руля непереложенного с профилем NASA (рис. 6), что, естественно, должно учитываться в расчетах ходкости.
Пример расчета
Расчет выполняется для круглоскулого судна, размерения и характеристики которого даны в начале статьи; коэффициент компенсации руля KδR = 0,29.
1 Безразмерные ГДХ изолированного руля:
производная коэффициента нормальной силы
коэффициент центра давления
– по рис. 1, 2 для λ = 1,5 и t = 0,15, Kt = 1,09, результаты расчета CPR приведены в таблице 1.
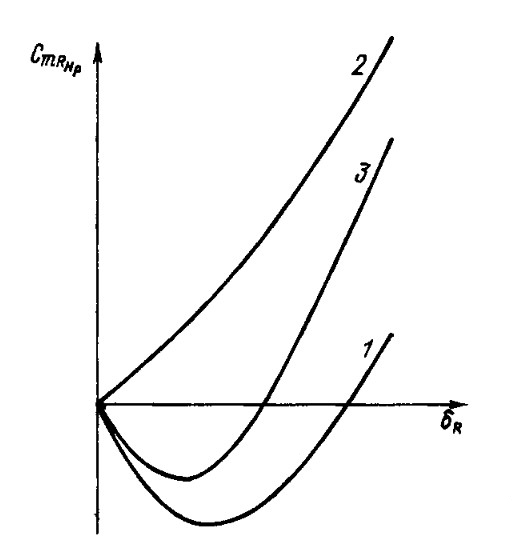
1 – перебалансированный руль; 2 – недобалансированный руль; 3 – удовлетворительный вид кривой CmRHp = f(δR)
| Таблица 1. Результаты расчета величин нормальной силы и момента на баллере руля | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| δR | CPλ | CPR | CPRH | CPRHp | CNRHp | CmRHp | N, кг | M, кГм | |
| 0 | |||||||||
| 5 | 0,0873 | 0,192 | 0,209 | 0,246 | 0,224 | 0,166 | -0,011 | 108 | -2,73 |
| 10 | 0,174 | 0,204 | 0,222 | 0,259 | 0,237 | 0,331 | -0,0175 | 216 | -4,34 |
| 15 | 0,262 | 0,22 | 0,24 | 0,277 | 0,255 | 0,49 | -0,0172 | 320 | -4,27 |
| 20 | 0,349 | 0,234 | 0,255 | 0,292 | 0,27 | 0,665 | -0,0133 | 434 | -3,3 |
| 25 | 0,436 | 0,258 | 0,281 | 0,318 | 0,296 | 0,83 | 0,005 | 542 | 1,24 |
| 30 | 0,524 | 0,287 | 0,313 | 0,34 | 0,328 | 0,998 | 0,038 | 652 | 9,4 |
| 35 | 0,611 | 0,312 | 0,34 | 0,377 | 0,355 | 1,164 | 0,0757 | 760 | 18,77 |
| 40 | 0,698 | 0,348 | 0,379 | 0,416 | 0,394 | 1,33 | 0,138 | 868 | 34,2 |
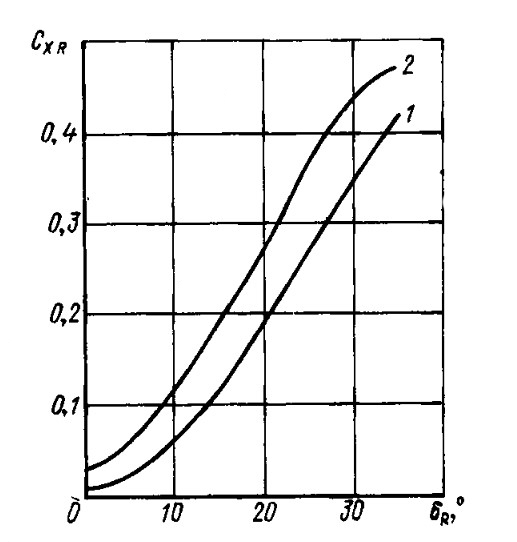
1 – профиль NASA; 2 – клиновидный профиль
2 Безразмерные ГДХ руля с учетом влияния корпуса:
- коэффициент KH – по рис. 3 для δ = 0,65;
- KH = 1,08;
производная коэффициента нормальной силы
поправка
– по рис. 3 для δ = 0,65
коэффициент центра давления
- результаты расчета приведены в таблице 1.
3 Безразмерные ГДХ руля с учетом влияния гребного винта и корпуса:
- коэффициент индукции Kи = 0,256;
производная коэффициента нормальной силы
производная коэффициента подъемной силы с учетом влияния ГВ
;

эффективное удлинение
- коэффициенты CPR0э и CPR0 – по рис. 4 для λэ = 0,936 и λ = 1,5;
- CPR0э = 0,18;
- CPR0 = 0,202;
- ΔСPR = CPR0э–CPR0 = –0,022;
- коэффициент центра давления CPRHp = CPRH+ΔСPR; результаты расчета приведены в таблице 1 и на рис. 7;
- коэффициент нормальной силырезультаты расчета приведены в таблице 1 и на рис. 7;
- коэффициент момента CmRHp = CNRHp(CPRHp–KδR); результаты расчета приведены в таблице 1 и на рис. 7.
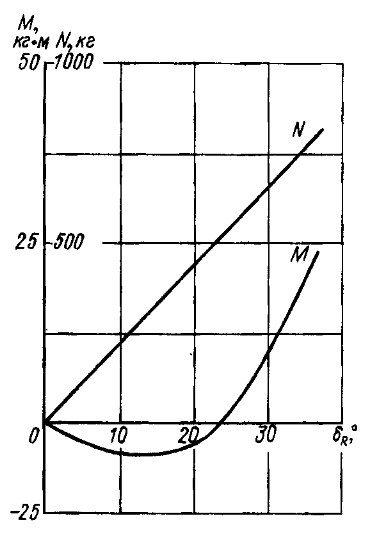
4 Гидродинамические силы и моменты, действующие на рулевое устройство судна:
средняя скорость обтекания руля νср = 7,7 м/с:
нормальная сила:
результаты расчета приведены в таблице 1 и на рис. 8;
момент на баллере:
- (bR = 0,38 м) – результаты расчета приведены в таблице 1 и на рис. 8.
Читайте также: Способы расчета управляемости малотоннажного судна
Таким образом, из результатов расчета следует, что при максимальной скорости переднего хода 20 км/ч на руле, переложенном на максимальный угол перекладки руля (35°), возникают следующие гидродинамические усилия:
- нормальная сила – 760 кг;
- момент на баллере ~ 18,8 кг·м.
Нашли опечатку? Выделите и нажмите CTRL+Enter





