Управляемостью называется способность судна двигаться по прямолинейной или криволинейной траектории при обеспечении возможности ее целенаправленного изменения. Два наиболее важных свойства определяют управляемость судна: устойчивость прямолинейного движения (устойчивость на курсе) и поворотливость.
Управляемость буксирного судна, устойчивость на курсеУстойчивость на курсе определяется возможностью сохранения заданного прямолинейного движения, а поворотливость — возможностью изменения направления вплоть до движения по криволинейной траектории наперед заданной кривизны.
Траектория, которая описывается центром тяжести судна при перекладке органа управления на постоянный угол, называется циркуляцией. Принято различать три периода циркуляции: маневренный, эволюционный и установившийся.
Маневренный период соответствует времени перекладки органа управления (руля, подвесного мотора и т. д.), эволюционный определяется интервалом времени с момента окончания перекладки до момента, начиная с которого элементы движения судна перестают зависеть от времени, установившийся период (установившаяся циркуляция) соответствует времени выдерживания органа управления на борту, отсчитываемому с момента окончания эволюционного периода.
Из перечисленных периодов циркуляции наиболее простое математическое описание в соответствии с разработанной теорией управляемости имеет установившаяся циркуляция. Вместе с тем данные по этому периоду достаточно полно характеризуют Основные понятия об управляемости суднауправляемость судна.
Движение судна постоянным курсом при изменении режимов работы движителейДвижение судна и, в частности, движение на установившейся циркуляции характеризует следующие кинематические параметры (рис. 1):
- радиус (диаметр) циркуляции R (D) (для установившейся циркуляции — радиус окружности, описываемой центром масс судна);
- угол дрейфа βg между ДП судна и вектором скорости при центре масс;
- линейная скорость движения центра масс судна v0;
- угловая скорость вращения судна ω, в режиме установившейся циркуляции:
относительная кривизна траектории (безразмерная угловая скорость)
— величина, обратная безразмерному радиусу
:
в режиме глиссирования соответствующие параметры имеют следующий вид:
- курс φ ° — угол между ДП судна и направлением его движения до перекладки рулевого органа (если в качестве первоначального направления движения принять земной меридиан, то понятие курса будет аналогично используемому в навигации);
- угол перекладки рулевого органа δR;
- угол крена θ;
- угол дифферента ψ.
Угловая скорость движения ω помимо формулы (1) может быть определена посредством замера изменения курса судна во времени:
где:
- △t — время изменения курса на угол △φ °.
Время, за которое судно совершает поворот на 360 °, называется периодом циркуляции:
Угол дрейфа, радиус циркуляции, линейная скорость произвольной точки по длине судна с координатой x определяются через соответствующие характеристики движения центра масс βg, R и v0 (см. рис. 1):
С учетом того, что движение на циркуляции происходит с небольшими углами дрейфа, формулу (1) приводят к виду:
Количественные данные о характеристиках управляемости (диаметр и относительная кривизна циркуляции, угол крена и т. д.) получают экспериментальным или расчетным путем.
В целом, наиболее достоверным является экспериментальный способ, при котором производятся полунатурные или Испытания и сдача судовнатурные испытания судна. Как правило, этим способом пользуются на заключительных стадиях проектирования (полунатурные испытания) либо уже после постройки головного образца.
Однако данные по управляемости требуются уже на ранних стадиях проектирования с целью оценки эффективности установленных средств управления и выбранных форм обводов — в этом случае используют расчетный способ. Кроме того, расчетный способ удобен для пересчета данных испытаний судна на близкое к нему по обводам, относительным размерениям и средствам управления. Для выполнения расчета необходимо знать силы и моменты, действующие на корпус судна и средства управления.
Гидродинамика органов управления малых судов
Руль
Криволинейное движение судна происходит под действием силы, возникающей на переложенных органах управления, в качестве которых для малых судов используются руль, подвесной мотор или поворотная колонка, реверсивнорулевые устройства водометного движителя Здесь не упомянута поворотная насадка на гребной винт, поскольку этот тип органа управления не нашел широкого распространения в малом судостроенииx.
Выбор площади руля, типы рулей
Руль характеризуют следующие геометрические параметры:
- площадь пера AR (часть площади, находящаяся впереди от оси баллера, называется площадью балансирной части руля);
- высота руля hR — расстояние, измеренное по оси баллера, между верхней и нижней кромками руля;
- хорда (средняя) руля:
- профиль руля (рис. 2) – контур сечения пера, перпендикулярный к оси баллера; расстояние между передней и задней точками профиля соответствует хорде руля в данном сечении;
относительная толщина
, равная отношению максимальной толщины профиля
к хорде,
положение максимальной толщины
– отношение расстояния от носика профиля до максимальной ординаты к хорде руля,
- относительное удлинение руля:
- коэффициент компенсации KδR – отношение площади балансирной части руля ко всей его площади.
Профили рулей задаются таблицей ординат (табл. 1).
| Таблица 1. Относительные толщины профилей (% максимальной толщины) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Отстояние сечения от передней кромки, % хорды | |||||||||||||
| 0 | 1,25 | 2,5 | 5 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
| Профиль NASA | |||||||||||||
| 0 | 31,6 | 43,6 | 59,2 | 78 | 95,6 | 100 | 96,7 | 88 | 76,1 | 61 | 43,7 | 24,1 | 2,1 |
| Клиновидный профиль | |||||||||||||
| 0 | 12 | 20 | 32 | 48 | 72 | 88 | 96 | 100 | 100 | 98 | 94 | 90 | 84 |
Площадь пера руля назначается в долях площади погруженной части ДП судна без хода:
На основании статистических данных и опыта эксплуатации для судов, двигающихся в водоизмещающем режиме, принимается K = 10÷15.
Предлагается к прочтению: Конструктивные типы транспортных судов и особенности проектирования их конструкций
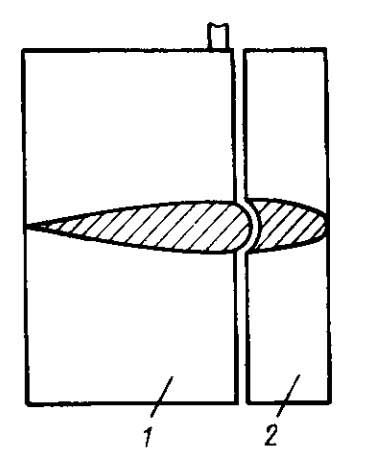
Для судов, движущихся в переходном режиме, коэффициент K задается графически (рис. 3) в зависимости от максимальной скорости судна и места установки руля (под днищем или за кормой).

Для глиссирующих судов площадь пера руля определяется из соотношения AR = (0,01÷0,015)L. Выбранная таким способом площадь руля может быть откорректирована на основании данных расчета или эксперимента.
1 — руль под днищем; 2 — руль за кормой
По способу соединения с корпусом рули делятся на:
- простые — с несколькими опорами на корпусе или ахтерштевне;
- полуподвесные — висящие на баллере и опертые на корпус или специальный кронштейн в одной или нескольких точках по высоте пера;
- подвесные – полностью висящие на баллере (рис. 4).
Кроме того, в зависимости от положения оси баллера они подразделяются на:
- небалансирные — с осью баллера, размещенной непосредственно у передней кромки;
- и балансирные — с осью баллера, расположенной на некотором удалении от нее.
Рули классифицируют также по форме в плане и профилю. Форма руля в плане тесно связана с приведенной выше классификацией.
По форме профиля рули подразделяются на пластинчатые и телесные (или обтекаемые); среди последних различают рули со скругленной передней кромкой и заостренной задней, а также с заостренной передней и тупой задней (суперкавитирующие) (рис. 5). Наиболее распространенным профилем обтекаемых рулей со скругленной передней кромкой и заостренной задней является профиль NASA (см. табл. 1).
Эти рули используются на судах, движущихся в водоизмещающем и переходном режимах.
Суперкавитирующий профиль имеет, как правило, клиновидную форму. При этом контур профиля может быть параболическим или иметь постоянный угол расширения, не превышающий 10-12 °. Безразмерные толщины клиновидного профиля с параболическим контуром приведены в табл. 1. Рули с суперкавитирующим профилем используются на глиссирующих судах.
а — клин с параболическим контуром; б —клин с постоянным углом расширения
Разновидность простых небалансирных рулей представляют рули за рудерпостом (или стойкой) (рис. 6). В непереложенном состоянии Ремонт судовых устройств. Освидетельствования и дефектация рулевого устройстваруль и рудерпост имеют общий профиль. Хорда рудерпоста, как правило, не превышает 0,4 хорды комплекса руль-рудерпост.
1 — перо руля; 2 — рудерпост (стойка)
При перекладке руля на угол δR относительно вектора скорости набегающего потока на его поверхности возникают нормальные и касательные гидродинамические силы, равнодействующая которых P может быть разложена (рис. 7) на подъемную силу Y и лобовое сопротивление X, направленные соответственно перпендикулярно и параллельно набегающему потоку. Проекция силы P на ось, перпендикулярную к хорде руля, называется нормальной силой N. Перечисленные составляющие и сила P связаны соотношениями:
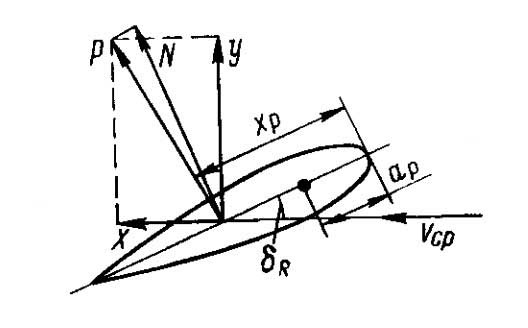
Точка пересечения равнодействующей силы P с плоскостью симметрии руля называется центром давления. Отстояние центра давления от передней кромки называется абсциссой центра давления xp. Момент силы P относительно баллера руля называется моментом на баллере, который для прямоугольного в плане руля определяется по формуле:
где:
- ap — отстояние оси баллера от передней кромки руля.
Для руля, отличного от прямоугольного, передняя кромка является фиктивным понятием, она определяется исходя из пересчета площади реального руля на равновеликий прямоугольный руль той же высоты (Формула 9). Гидродинамические силы X, Y, N, момент M, а также координату точки xp принято представлять через безразмерные коэффициенты:
где:
- CXR, CYR, CNR, CmR, CpR — безразмерные коэффициенты сопротивления, подъемной силы, нормальной силы, момента и центра давления соответственно, совокупность этих коэффициентов называется безразмерными гидродинамическими характеристиками (ГДХ) руля;
- vcp – скорость потока, обтекающего руль.
Формула (14) в безразмерном виде записывается следующим образом:
где:
- KδR — коэффициент компенсации руля.
Гидродинамические характеристики изолированного руля
Систематические данные по безразмерным ГДХ рулей при изменении удлинения, относительной толщины, формы в плане, типа профиля приводятся в специальных изданиях, называемых атласами.
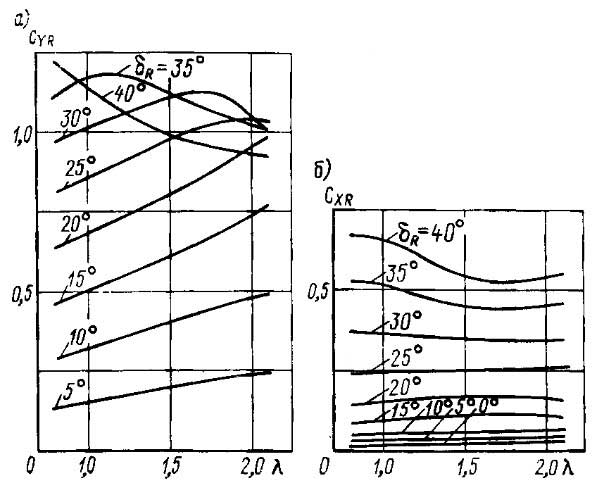
В качестве примера на рис. 8 приведены графики зависимостей коэффициента подъемной силы прямоугольных рулей (профиль NASA,
)
в функции удлинения и угла перекладки. Наиболее существенным образом безразмерные ГДХ изменяются в зависимости от удлинения, а также при переходе от подвесного руля к полуподвесному.
Для выполнения расчетов управляемости, а также для суждения об эффективности выбранного рулевого устройства наиболее важна информация о подъемной силе руля. Подъемная сила руля при λ > 0,8 линейно зависит от угла перекладки вплоть до критического, при котором происходит срыв потока, приводящий к резкому падению подъемной силы.
В зоне линейной зависимости коэффициент подъемной силы представляют в виде:
где:
— производная коэффициента подъемной силы по углу атаки [тангенс угла наклона кривой
Величина определяется по формуле:
где:
- K0 = 0,88 — для подвесного руля;
- K0 = 0,64 — для полуподвесного руля.
С ростом удлинения руля возрастает его эффективность — увеличивается значение
, однако одновременно с этим уменьшается критический угол перекладки (рис. 8), поэтому реальный диапазон изменения удлинения судовых рулей составляет 1-2.
Применительно к быстроходному судну, если Авторулевой Аист, общие характеристикируль находится вблизи свободной поверхности или пересекает ее, в формулу 18 подставляется фиктивное удлинение:
а для руля, расположенного под плоским или слабокилеватым днищем:
Чем тоньше руль, тем большим значением
он обладает и тем раньше наступает срыв потока с его пера. Однако количественно влияние относительной толщины сказывается незначительно, поэтому
для рулей различной толщины определяется по формуле 18.
В том случае если руль расположен за рудерпостом, производная коэффициента подъемной силы комплекса руль—рудерпост при условии:
(
– хорда комплекса руль-рудерпост) может быть приближенно определена следующим образом:
где:
- – определяется по формуле 18 для значения λ руля, работающего в составе комплекса
руль-рудерпост.
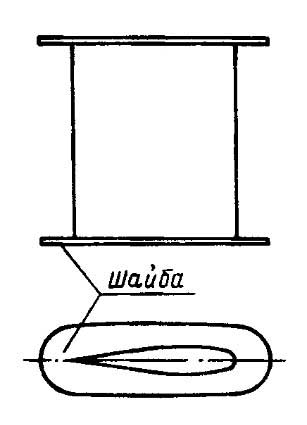
Для увеличения подъемной силы руля с его торцов могут быть установлены шайбы (рис. 9) шириной (2,5÷3,5)tmax руля. Производная коэффициента подъемной силы руля с шайбой составляет:
где:
- – определяется по формуле 18;
- Кш – коэффициент, учитывающий влияние шайб, — по рис. 10.
Влияние ГВ и корпуса на ГДX руля
При выполнении расчетов управляемости необходимо знать боковую силу, обусловленную органами управления и направленную перпендикулярно к ДП судна. В случае руля приближенно полагается, что боковая сила равна подъемной, которая с учетом влияния ГВ и корпуса определяется по формуле:
где:
- – производная коэффициента подъемной силы руля, расположенного за ГВ и корпусам;
- a — угол атаки руля;
- vср — средняя скорость обтекания руля.
Перечисленные выше параметры определяются следующим образом:
где:
- Ки – коэффициент индукции ГВ,
- λB – удлинение части руля, находящейся в струе ГВ,
- hB — высота части руля, находящейся в струе ГВ;
— площадь части руля, находящейся в струе ГВ;
- CTv — коэффициент нагрузки гребного винта по упору, определяемый по данным ходкости либо по формуле:
- v0 — скорость судна;
- ψρ — коэффициент попутного потока (Ходкость и движителиопределяется по данным ходкости);
- Dp — диаметр ГВ;
- Тy — упор ГВ (при расчете CTv значения v, ψp и Тy соответствуют прямому курсу судна);
- n1 — коэффициент, учитывающий положение руля относительно винта по высоте и определяемый по рис. 11.

Угол атаки руля на циркуляции определяется по формуле:
где:
— безразмерное отстояние баллера руля от центра масс;
- κE — эффективный коэффициент влияния корпуса и винта на руль,
- κв — коэффициент влияния гребного винта,
— площадь части руля, находящейся вне струи ГВ;
- κk — коэффициент влияния корпуса, для круглоскулых судов, у которых руль расположен за дейдвудом κk = 0,5, в остальных случаях κk = 1.
Средняя скорость обтекания руля определяется по формуле:
где:
Момент от руля относительно центра масс судна определяется по формуле:
Аэрация и кавитация руля
На верхней по отношению к набегающему потоку поверхности переложенного руля возникает разрежение; на нижней — зона положительных давлений (рис. 12).
Читайте также: Плавание судов — портовые воды
Из-за разрежения, которое может быть значительным при увеличении скорости или угла перекладки руля, возникают явления, приводящие к уменьшению подъемной силы руля даже при докритических углах перекладки.
Одно из таких явлений — аэрация руля, при которой происходит подсос атмосферного воздуха на сторону разрежения руля.
Для рулей, пересекающих свободную поверхность или расположенных под днищем водоизмещающих или сильнокилеватых глиссирующих судов (например, с обводами “глубокое V“), наступление аэрации определяется следующим условием:
где:
- hт — заглубление нижнего торца руля от уреза воды;
- dR — условный поперечный размер руля,
— коэффициент, определяемый по рис. 13.
В случае расположения руля под плоским или слабокилеватым днищем быстроходного судна (рис. 14) условие наступления аэрации имеет следующий вид:
где:
- hн — заглубление нижнего торца руля от днища;
- Т — осадка судна без хода;
— отстояние руля от транца.
В качестве конструктивных мер, позволяющих избежать или уменьшить влияние аэрации, используются установка руля под днищем судна или установка антикавитационной пластины над рулем, расположенным за транцем.
Другой причиной падения подъемной силы руля может быть кавитация, возникающая, так же как и на гребном винте, при увеличении скорости обтекания.
Основным критерием, количественно определяющим степень развития кавитации, является число кавитации:
Данные по гидродинамическим характеристикам рулей при различных числах кавитации приводятся в атласах. На рис. 15 приведены графики зависимости коэффициента подъемной силы СYR от угла перекладки при различных числах кавитации для трапециевидных рулей λ = 1,5 с профилем NASA и клиновидным, а также овального в плане руля λ = 1,5 с профилем NASA. Видно, что последний из перечисленных рулей традиционно применявшийся продолжительное время на быстроходных судах, обладает меньшим значением СYR, нежели рули трапециевидной формы в плане, особенно в режиме кавитации.
Руль с клиновидной формой профиля обладает большим значением подъемной силы во всех режимах обтекания, включая безкавитационный, по сравнению с другими типами рулей. Еще одно преимущество руля с клиновидным профилем состоит в том, что влияние кавитации у него проявляется при больших углах атаки и сказывается в меньшей степени на величине подъемной силы, нежели на рулях с острой задней кромкой.
Кроме формы профиля наиболее существенными параметрами, определяющими ГДХ руля в кавитационном режиме, являются относительная толщина и удлинение: увеличение указанных геометрических характеристик приводит к более раннему и существенному влиянию кавитации.
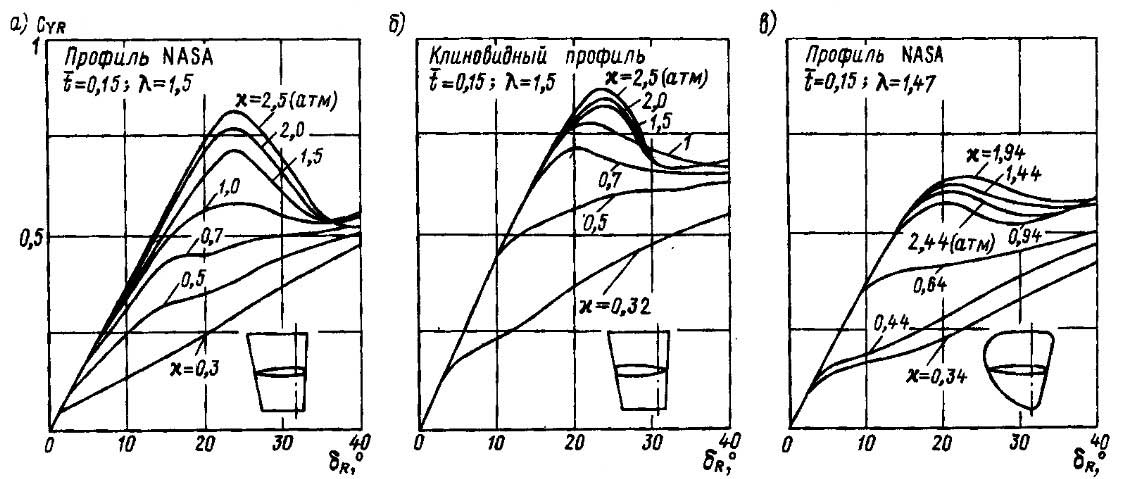
а — руль трапециевидной формы в плане, профиль NASA; б – руль трапециевидной формы в плане, клиновидный профиль; в — руль овальной формы в плане, профиль NASA
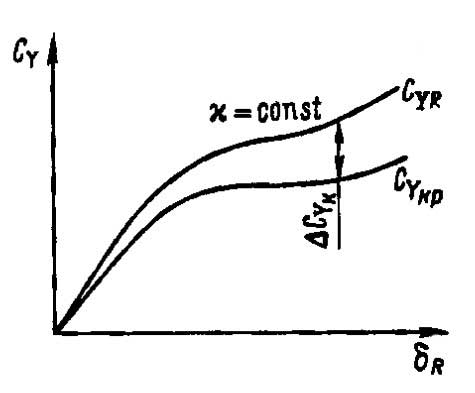
Для руля, расположенного за ГВ, коэффициент подъемной силы в режиме кавитации определяется следующим образом:
- для всех углов перекладки определяется поправка:
где:
– определяют по формуле 18, а Ки — по формуле 25.
К значениям CYR изолированного руля при заданном κ (данные атласа) прибавляются значения
(рис. 16):
Подвесной мотор (поворотная колонка)
Боковая сила, возникающая при перекладке подвесного мотора или подвесной колонки и направленная перпендикулярно к ДП определяется по формуле:
где:
- vp – определяют по формуле 28;
- δR — угол перекладки подвесного мотора или поворотной колонки;
– безразмерное плечо оси поворота подвесного мотора или поворотной колонки относительно центра масс;
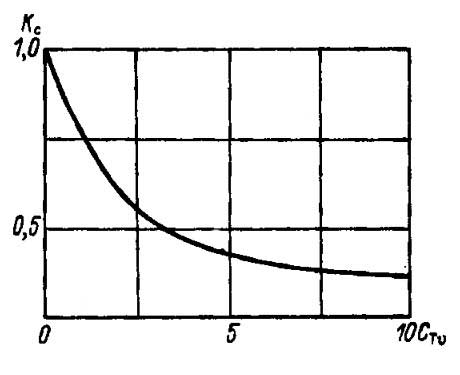
- Kc — коэффициент, учитывающий спрямляющее действие набегающего потока на струю ГВ (рис. 17).
Момент поперечной силы Y0 относительно центра масс определяют по формуле:
Для улучшения управляемости при ходе по инерции на подвесном моторе рекомендуется устанавливать пластину – аналог руля (рис. 18).
Влияние этой пластины, равно как и ноги подвесного мотора или колонки, при расчете управляемости можно не учитывать, поскольку это приводит к появлению безопасной ошибки.
| Таблица 2. Производная подъемная сила РРУ | |||||
|---|---|---|---|---|---|
| Тип РРУ | Отношения основных характеристик РРУ | ||||
| nо/dc | h/dc | b/dc | |||
| Парные рули | 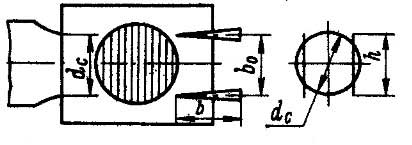 | 0,68 | 1,46 | 1 | 1,05 |
| 0,68 | 1,46 | 0,8 | 0,87 | ||
| 0,68 | 1,46 | 0,6 | 0,65 | ||
| Коробчатые рули | 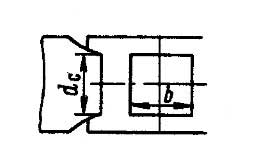 | – | – | 1 | 0,916 |
| Поворотное сопло | 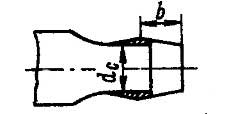 | – | – | 0,8 | 1,37 |
Водометный движитель
Боковую силу, возникающую при работе реверсивно-рулевого устройства (РРУ) водомета, определяют по формуле:
где:
- dc — диаметр трубы выходного отверстия водомета;
- vs — скорость истечения из выходного отверстия водомета;
— безразмерное отстояние баллера РРУ от центра масс судна;
- δR — угол перекладки РРУ;
— производная коэффициента подъемной силы РРУ (табл.2).
Связь между скоростью судна v и скоростью выброса струи vs определяется по данным расчета ходкости, ее можно представить в виде (см. формулу Водометные движители малотоннажных судов, устройство и чертежи“Определение средней скорости протекания жидкости через диск ГВ”):
где:
- qs – коэффициент, зависящий от геометрических характеристик водомета (см. рис. Водометные движители малотоннажных судов, устройство и чертежи“График для определения коэффициента засасывания водометного комплекса”, Водометные движители малотоннажных судов, устройство и чертежи“График для определения относительной скорости протекания воды через диск водометного движителя”).
Момент поперечной силы Y0 относительно центра масс определяется по формуле:





