Прокладка курса выполняется с требуемой частотой, которая зависит от точности обсерваций, расстояния до навигационных опасностей, расположения опасностей относительно пути, направления и скорости суммарного сноса.
Пусть СКП текущего места судна описывается формулами (“СКП текущего места судна при “корректируемом счислении””Методы контроля за местоположением и движением судна, ” СКП счисления за время плавания от исходной обсервации”Методы контроля за местоположением и движением судна), а нарастание погрешностей характеризуется кривой (2) на (рис. “СКП текущих координат судна при различных методах контроля”Методы контроля за местоположением и движением судна). Если установлена допустимая СКП текущего места (МТ)доп, то график позволяет определить допустимое время плавания по счислению (tc)доп c момента последней обсервации. Эта же задача может быть решена чисто математически; на основе формулы “СКП текущего места судна при “корректируемом счислении””Методы контроля за местоположением и движением судна запишем:
Тогда допустимая СКП счислимого места
Отсюда получим (tс)доп при tC ≥ 2 часов:
при tC ≤ 2 часов:
Подобный вероятностный подход позволил сформулировать требования ИМО к точности судовождения, изложенные в Резолюции ИМО А.529(13) (табл. 1, 2).
| Таблица 1. Стандарты точности судовождения ИМО (По резолюции ИМО А.529(13) от 17.11.1983 г.) | |
|---|---|
| Стадии рейса | Порядок точности судовождения |
| Стесненные воды (вход в гавань и т. д.) | В зависимости от местных обстоятельств |
| Другие воды | Предельная (с вероятностью 0,95) погрешность текущего места не должна превышать 4 % расстояния до ближайшей опасности с максимумом в 4 м. Мили |
| Таблица 2. Допустимая дискретность обсерваций | |||||||
|---|---|---|---|---|---|---|---|
| Дистанция до ближайшей опасности, мили | Допустимая погрешность (0,95) текущего места судна, мили | Предельные (0,95) погрешности обсерваций, мили | |||||
| 00 | 0,1 | 0,25 | 0,5 | 1 | 2 | ||
| Максимально допустимый интервал плавания по счислению от последней обсервации, мин. | |||||||
| 10 | 0,4 | 12 | 12 | 9 | – | – | |
| 20 | 0,8 | 28 | 28 | 27 | 22 | – | – |
| 30 | 1,2 | 48 | 48 | 47 | 44 | 27 | – |
| 40 | 1,6 | 72 | 72 | 71 | 68 | 56 | – |
| 50 | 2,0 | 100 | 100 | 99 | 97 | 87 | – |
| 60 | 2,4 | 132 | 132 | 131 | 129 | 120 | 73 |
| 70 | 2,8 | 168 | 168 | 167 | 165 | 157 | 118 |
| 80 | 3,2 | 208 | 208 | 207 | 206 | 198 | 162 |
| 90 | 3,6 | 252 | 252 | 252 | 250 | 242 | 210 |
| 100 и более | 4,0 | 300 | 300 | 300 | 298 | 291 | 260 |
Примечания:
- Приведенные в таблице цифры получены чисто математическим путем, учитывая обычные погрешности счисления (погрешности компаса и лага, погрешности учета их поправок, погрешности учета течения и ветрового дрейфа).
- Приведенные цифры относятся к постоянной дистанции до опасности. Чем ближе опасность, чем выше скорость относительного сближения с ней, чем сильнее действуют течение и ветер, тем чаще должны выполняться обсервации.
Вероятность определения места судна с требуемой точностью (Мдоп) можно оценить на основе распределения Релея:
где:
- M0 – радиальная СКП обсервации.
Расчеты по этой формуле можно выполнять по табл. 1-a “MT-75”.
При плавании между навигационными опасностями, по каналам и фарватерам требования к точности судовождения выводятся на основе “вероятностного подхода” и функций Лапласа (рис. 1).
При “вероятностном” подходе к выводу требуемой ширины фарватера принимают, что маневренные отклонения судна от ЛЗП носят случайный характер, подчиняются закону нормального распределения и оцениваются средним квадратическим значением (± my). Тогда вероятность безопасного прохода судна оценивается формулой:
где:
- z1, z2 — нормированные (т. е. выраженные в средних квадратических отклонениях) расстояния до опасных изобат справа и слева (рис. 1):
- y1, y2 — линейные расстояния от границ “геометрической полосы” до опасных изобат справа и слева;
- Ф(z1), Ф(z2) – нормированная функция Лапласа, выбираемая из таблицы 1-б “МТ-75”.
Если же ЛЗП проложена посередине между опасностями, то y2 = y1, z2 = z1 = z, тогда
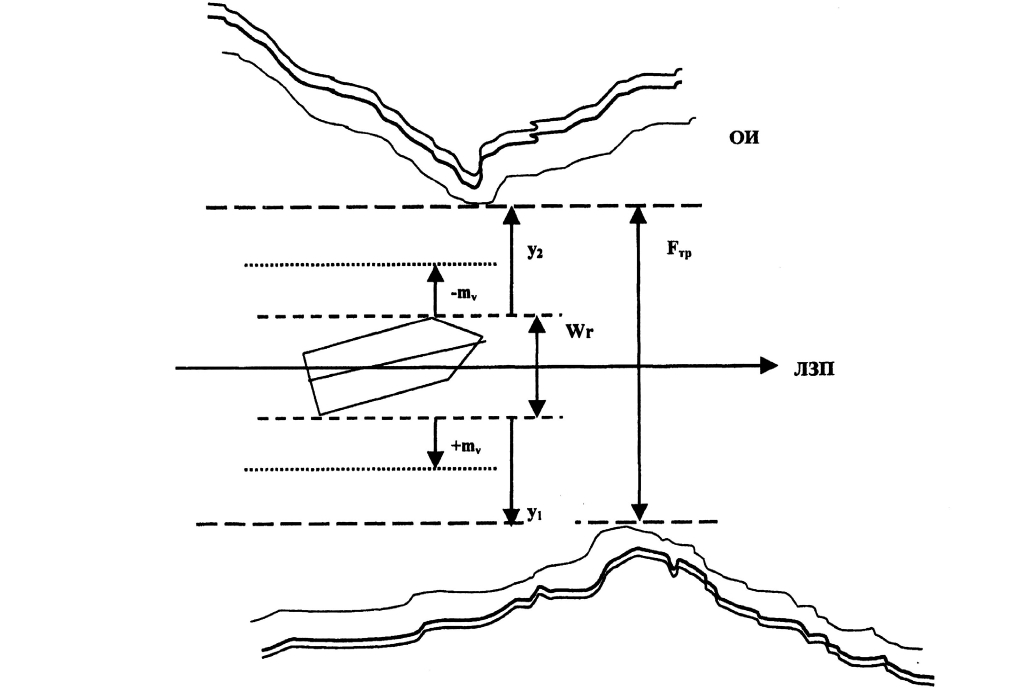
С точки зрения навигации, прокладка курса посередине узкости более предпочтительна, т. к. при той же точности навигационного контроля (±mу) вероятность безопасного прохода повышается по сравнению с любыми другими “несимметричными” вариантами расположения ЛЗП.
Предлагается к прочтению: Параллельное индексирование
Формула 7 особенно ценна тем, что позволяет выработать нормативные требования к точности судовождения относительно ширины фарватера. Задаваясь требуемым уровнем вероятности безопасного прохода (PЗАД), обратным входом в таблицу 1-б “МТ-75” можно получить требуемую ширину фарватера:
Если же размерами судна можно пренебречь, то
Отсюда получим норматив требуемой точности судовождения:
где:
- Δдоп% – допустимое среднее квадратическое значение маневренного смещения в отношении к ширине свободного навигационного пространства.
Например, задаваясь вероятностью безопасного прохода PЗАД = 0,999, обратным входом в таблицу 1-б “МТ-75” получим Zmp = 3,57, откуда Δдоп% = 14 %, т. е. среднее квадратическое значение маневренного смещения судна с ЛЗП (/М),683) не должно превышать 14% имеющейся ширины свободного пространства между опасными изобатами (за вычетом ширины “геометрической полосы”.
Подобный вероятностный подход практически использован при выработке требований к точности судовождения Международной Ассоциацией Маячных Служб (МАМС). Требования “МАМС”, приведенные в табл. 3, являются более детальными, чем требования ИМО (табл. 1, 2).
В требованиях как МАМС, так и ИМО задаются предельные радиальные погрешности определения места судна (МТ)доп, (М0)доп, с вероятностью P = 95 %. Связь между СКП(М) и предельными (М0,95) погрешностями задается (при нормальном распределении погрешностей) приближенными формулами:
| Таблица 3. Требования МАМС по точности судовождения | |||
|---|---|---|---|
| Район плавания | (tомс)доп | (Δt)доп | |
| Стесненные воды: а) с установленными каналами, ФВК, СРД | 20 % FФВК | Мгновенно (6-10 с) | Непрерывно (6-10 с) |
| б) подходы к портам и узкостям | 50-200 м | 0,5-1 мин | 1-5 мин |
| Прибрежное плавание (Доп = 10-15 миль) | 4-20 кб | 1-3 мин | 10-30 мин |
| Открытое море (Доп > 50 миль) | 2-4 мили | 10-15 мин | 2-4 часа |
Допустимая дискретность обсерваций (At) оценивалась с помощью формул (формулы 2, 3), а допустимое время на определение места (^мс) оценивалось по допустимому отвлечению судоводителя от наблюдения за обстановкой и по допустимой величине запаздывания навигационной информации в зависимости от условий плавания.
Требования как ИМО, так и МАМС носят только ориентирующий характер, на практике требуемая точность судовождения устанавливается капитаном в зависимости от условий плавания. При этом рекомендуется определять место судна через равные промежутки – это облегчает анализ невязок и контроль на промахи. Чем ближе опасности и сложнее навигационные условия, сильнее снос судна в сторону опасности – тем чаще должны быть определения места. Устанавливать дискретность обсерваций менее 5 мин, как правило, нецелесообразно даже в стесненных водах, т. к. основную роль здесь играют “лоцманские” методы.
Местоположение судна на ходу должно определяться часто и, по возможности, через равные промежутки времени. Выбор способа определения места судна обуславливается:
- наличием, исправной работой и надежностью судовых технических средств навигации;
- необходимой точностью, допустимой дискретностью и продолжительностью наблюдений, при которых обеспечивается безопасное плавание судна;
- условиями и возможностью наблюдениями опознания ориентиров;
- временем обработки результатов наблюдения;
- ограничениями, характерными для технических средств и методов навигации (см. раздел 5 данного “Руководства”).
Требуемая частота определений места судна зависит от таких факторов, как дистанция до ближайшей навигационной опасности (Доп), скорость судна, направление и скорость сноса, точность обсерваций, и устанавливается капитаном. Для каждого участка перехода должно быть заранее принято обоснованное решение относительно того, как часто должно определяться место судна.
Читайте также: Выбор и планирование методов контроля за местоположением и движением судна
При назначении требуемой частоты определений места следует принимать во внимание Рекомендации Резолюция ИМО А.529(13) и рекомендации “МАМС”.
Место судна должно обязательно определяться, если это возможно, при:
- Отходе от побережья для плавания в открытом море;
- Подходе к берегу, навигационным опасностям после перехода открытым морем;
- Подходе к району со стесненными условиями плавания, СРД, зоне действия системы УДС;
- Сдаче вахты (сдающим вахту ПКМ) и приеме вахты (принимающим вахту ПКМ);
- Подходе к точке поворота и после поворота на новый курс;
- Уменьшении дальности видимости или подходе к зоне ограниченной видимости;
- Обнаружении неизвестных опасных объектов и глубин, не показанных на навигационной карте, а также необычных природных явлений;
- Аварийном случае с судном;
- Получении сигнала бедствия;
- Всех других случаях, требующих знания точного места судна.





