Навигационные методы контроля за местоположением и движением судна должны обеспечивать решение следующих задач:
- Определение текущих координат судна в выбранной координатной системе – географической (φ, λ), полярной (пеленг и дистанция относительно заданной точки), маршрутной (расстояние до очередной точки поворота и боковое уклонение от ЛЗП);
- Определение действительной траектории движения судна, действительных элементов движения (пути, путевой скорости, суммарного угла сноса) и оценку тенденции движения судна для прогнозирования текущих координат по времени;
- Контроль бокового уклонения судна с ЛЗП и расчет коррекции курса для возвращения на ЛЗП или для выхода в заданную точку маршрута.
Методы контроля за местоположением и движением судна
Перечисленные задачи контроля относятся к так называемым “Задачам реального времени”, решение которых бессмысленно, если оно будет получено позднее, чем через некоторый промежуток времени (“такт реального времени”). Чем сложнее навигационные условия, тем короче должен быть “такт реального времени”, т. е. меньше допустимое запаздывание навигационной информации. Поэтому достоинство любого навигационного метода определяют три главных характеристики: точность определения текущих координат судна, продолжительность навигационного определения (время, затраченное на получение координат) и дискретность определений (промежуток времени между последовательными определениями координат).
Существующие методы контроля за местоположением и движением судна могут быть поделены на две большие группы: “штурманские” и “лоцманские” (рис. 1).
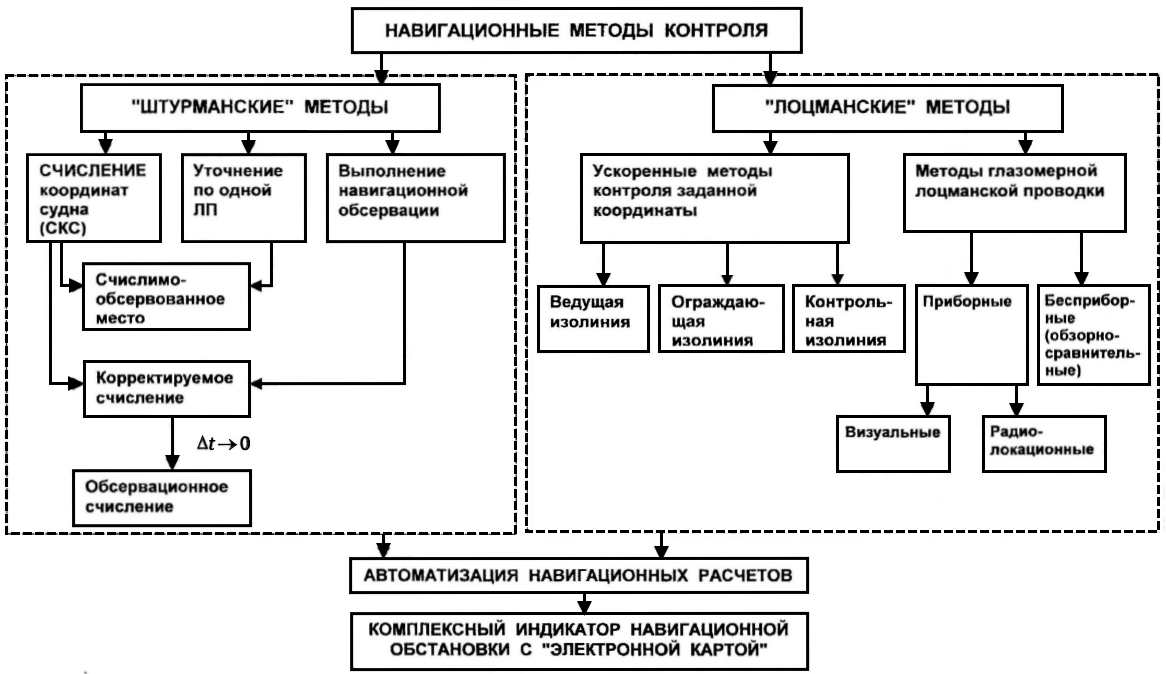
При “штурманских” методах контроля на основе навигационных измерений, расчетов и/или прокладки получают точку, в которой находилось судно, и в зависимости от положения этой точки относительно ЛЗП (берега, навигационных опасностей) решают остальные навигационные задачи. К штурманским методам относятся счисление координат судна, его уточнение по одной линии положения, навигационные обсервации, а также методы, образуемые их сочетаниями, включая “корректируемое счисление”.
Основными достоинствами счисления являются его непрерывность, автономность, простота и наглядность, легкость автоматизации. Важнейшим ограничением счисления является нарастание погрешностей счислимого места по мере плавания по счислению, в особенности – под действием неучитываемых (или неточно учитываемых) систематических факторов. Так, систематическая ошибка счисления составит за сутки 24 мили за каждый узел скорости не учитываемого течения. Чем дольше судно следует по счислению, тем больше возможная погрешность счислимых координат, тем ниже степень доверия к счислимому месту. Таким образом, требуется периодическая коррекция счислимых координат, т. е. сброс накопившихся погрешностей счисления.
Обсервованное место судна – место, координаты которого получены пересечением двух и более одновременных (или практически одновременных) обсервованных линий положения. Навигационная обсервация абсолютно независима от счисления, поэтому позволяет “сбросить” накопившиеся погрешности счисления до уровня погрешностей самой обсервации. Однако навигационные обсервации довольно продолжительны, дискретны, неавтономны (т. е. требуют наличия ориентиров или передающих радиостанций), подвержены погрешностям измерений и их обработки. Возможны промахи при опознавании ориентиров, навигационных измерениях и их обработке. Таким образом, хотя в общем случае обсервованное место судна более надежно, чем счислимое или счислимо-обсервованное, оно также нуждается в контроле.
Предлагается к прочтению: Особенности выбора курсов для океанского перехода
Поэтому наиболее распространенным “штурманским” методом контроля является “Корректируемое счисление” – периодические обсервации, в промежутках между которыми ведется счисление координат судна (причем с развитием технических средств судовождения дискретность обсерваций все более уменьшается). Счисление обеспечивает непрерывность контроля, расчет поворотов, опознавание ориентиров, контроль обсерваций на промах, определение (по результатам обсерваций) действующего вектора сноса, выдачу счислимых координат для решения различных навигационных задач (в том числе – для расчета обсервованных координат “от счислимого места” при обобщенном способе линий положения). В свою очередь, навигационные обсервации позволяют периодически уточнять место судна, “сбрасывать” накапливающиеся погрешности счисления, выявлять действующие систематические факторы (например, снос течением) и тем самым повышать точность самого счисления.
СКП текущего места судна при “корректируемом счислении”
где:
- Mо – СКП исходной обсервации, от которой ведется счисление;
- Mc(t) – СКП счисления за время плавания от исходной обсервации (tc):
- Кc – коэффициент точности счисления, характеризующий скорость нарастания погрешностей счисления и определяемый экспериментально для различных условий плавания.
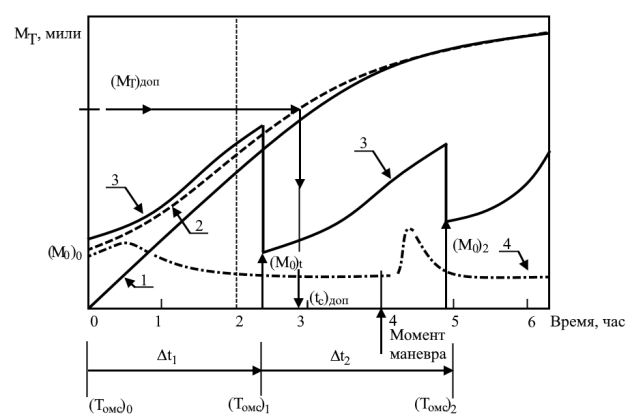
СКП счислимого места монотонно нарастает по мере плавания по счислению от нулевого значения (кривая 1 на рис. 2), а СКП текущего места – от уровня Mо (кривая 2). При периодических обсервациях (“периодически корректируемое счисление”) график Мт(t) имеет “пилообразную” форму (кривая 3), где нижний уровень погрешностей определяется значениями Mо, скорость нарастания погрешностей – коэффициентом Кс, а время нарастания погрешностей – дискретностью обсерваций (Δt).
При малой дискретности обсерваций (Δt→0) возможен режим “обсервационного счисления” – счисление координат, выполняемое путем совместной автоматизированной обработки данных от средств счисления. “Обсервационное счисление” является наиболее эффективным и надежным приборным методом контроля за местоположением и движением судна обсервации. СКП текущих координат (в установившемся режиме) может быть меньше СКП обсерваций (кривая 4 рис. 2). Однако данный метод возможен лишь при использовании средств автоматизации судовождения.
- СКП счисления;
- СКП счисления от исходной обсервации;
- СКП текущего места при корректируемом счислении;
- СКП “обсервационного счисления”.
В режиме “корректируемого счисления” обсервации должны тщательно анализироваться тем, чтобы оценивать надежность счисления и обсерваций, произвести контроль на промахи, выявить и учесть систематические факторы. Практикой выработано понятие “надежность обсервации”. Обсервация считается надежной, если одновременно выполняются условия:
- Навигационные измерения выполнялись с помощью исправных технических средств с надежными поправками;
- Измерения выполнялись в пределах зоны хорошей видимости ориентиров или уверенного приема сигналов РНС при обычном уровне помех;
- Избыточность измерений обеспечивает контроль промахов;
- Ориентиры (станции РНС) подобраны оптимально;
- Ориентиры надежно опознаны (многозначность измерений надежно устранена);
- Систематические погрешности надежно учтены, а случайные имеют обычный уровень;
- Применимые методы обработки измерений либо исключают возможность промахов, либо допускают контроль на промахи;
- Расстояние между обсервациями соответствует скорости судна и времени, а угол сноса и путевая скорость – условиям плавания;
- СКП обсервации по меньшей мере втрое меньше, чем СКП счислимого места;
- Невязка между счислимой и обсервованной точками меньше суммы предельных радиальных погрешностей счисления и обсервации
Большая невязка может быть следствием погрешностей или промаха в самой обсервации (повторить определение, и по возможности – другим способом), в счислении (проверить расчеты и прокладку от последней надежной обсервации), неучитываемого или неточно учитываемого сноса (проверить возможность такого сноса при действующих гидрометеоусловиях), ненадежных поправок компаса или лага либо ненадежной работы этих приборов.
Надежная обсервация может быть принята к учету для дальнейшего счисления. При любых сомнениях место судна по возможности определяется снова, желательно другим способом. До выяснения причины появления большой невязки достоверность места судна считается сомнительной.
Оценка надежности обсерваций существенно упрощается, если анализируется целая серия обсерваций, полученных через равные промежутки времени. При движении судна постоянным курсом скоростью обсервованные точки должны лежать на одной прямой, расстояния между ними одинаковы (или пропорциональны времени) и соответствуют пройденному судном расстоянию, невязка либо постоянна, либо монотонно изменяется по величине и направлению, а при переходе на другую комбинацию ориентиров не наблюдается резкого ее изменения.
Подводя итог, можно сделать вывод, что в целом “штурманские методы” обеспечивает решение навигационных задач с наибольшей полнотой, наглядностью и надежностью, упрощается контроль на промахи, благодаря четкой алгоритмизации задач облегчается автоматизация их решения. Однако “штурманские методы” имеют и ряд серьезных ограничений:
- Отвлечение судоводителя от наблюдения и управления судном на время получения обсервации;
- Длительность процесса определения места судна;
- Возможность оценки тенденции движения судна – только после получения серии обсерваций;
- Как результат, существенное запаздывание навигационной информации, что особенно неприемлемо при плавании в стесненных водах.
Этих недостатков практически лишены “лоцманские” методы контроля за местоположением и движением судна (рис. 1), основанные на детальном знании района плавания, тщательных предварительных расчетах и прокладке и обеспечивающие оперативную оценку текущего местоположения и движения судна по минимально необходимой информации. В штурманской практике наиболее распространены ускоренные методы контроля заданной координаты, основанные на использовании ведущих, ограждающих, контрольных изолиний (линий положения).
Ведущая изолиния или линия положения (ВЩ ЛП) служит для непрерывного оперативного контроля за движением судна по ЛЗП с помощью измерения (контроля) только одного навигационного параметра (ведущий створ, ведущий пеленг, ведущая гипербола и др.).
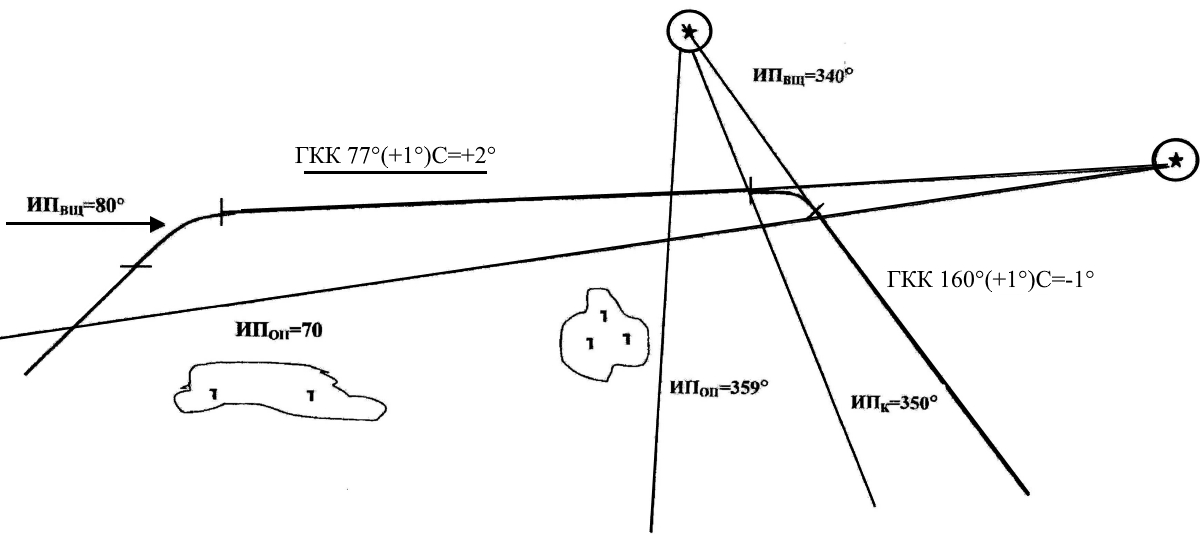
Путь судна выбирается совпадающим с ВЩ ЛП (рис. 3). При этом должна обеспечиваться надежная непрерывная наблюдаемость ориентира на курсе (недопустима смена ВЩ ЛП в момент прохода вблизи навигационной опасности). Снимается с карты и рассчитывается “ведущее” значение навигационного параметра (ИПвщ = 80° на рис. 3), его значение надписывается на карте; устанавливается закон изменения навигационного параметра в зависимости от стороны смещения судна с ЛЗП (например, при сносе с ЛЗП вправо пеленг на ведущий ориентир по носу будет уменьшаться).
ВЩ ЛП выбирается таким образом, чтобы:
- она совпадала с ЛЗП и вела “чисто” от навигационных опасностей;
- выбранный ориентир заблаговременно обнаруживался, надежно опознавался и мог непрерывно наблюдаться в течение всего требуемого времени;
- один и тот же метод и ориентир использовались бы для контроля как ВЩ ЛП, так и ОЛП;
- ВЩ ЛП обеспечивала необходимую быстроту, точность, надежность и однозначность контроля;
- не было смены метода и/или ориентира на опасном участке и/или вблизи навигационных опасностей.
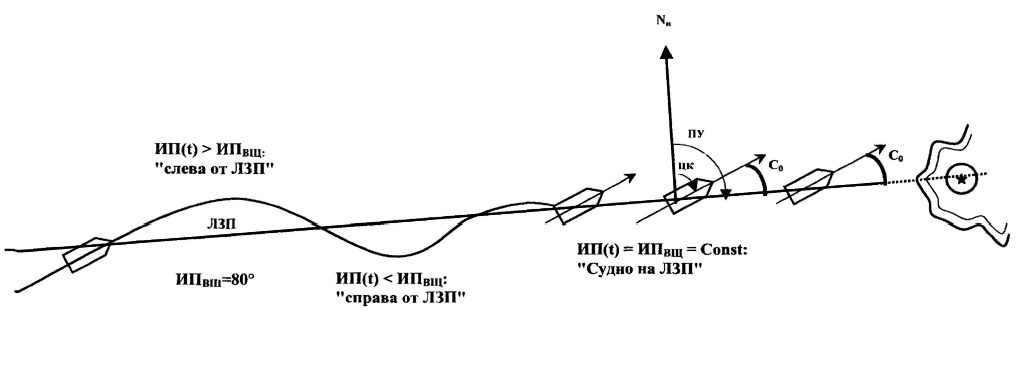
При подходе судна к данному участку необходимо заблаговременно обнаружить и надежно опознать ведущий ориентир, по мере приближения к ВЩ ЛП начать контроль навигационного параметра, лечь на ведущую изолинию и путем небольших подворотов добиться, чтобы отсчет навигационного параметра был постоянным и равен заданному значению:
После того, как судно начнет устойчиво следовать по ЛЗП, можно получить фактический угол суммарного сноса:
где:
- τВЩ = ПУЗАД – направление ведущей изолинии. СКП ведущей линии положения.
Зная СКП ведущей линии положения, можно оценить как ширину полосы движения судна при плавании по ведущей изолинии, так и требуемую ширину фарватера, используя рекомендуемые в “Навигации” формулы.
Таким образом, ВЩ ЛП позволяет провести судно по ЛЗП с непрерывным контролем бокового смещения, без каких-либо расчетов или построений, что позволяет оперативно реагировать на появляющийся снос и не допускать значительных отклонений судна от ЛЗП. Недостатком является неопределенность положения судна вдоль ЛЗП, что требует применения других методов контроля (особенно при подходе к повороту).
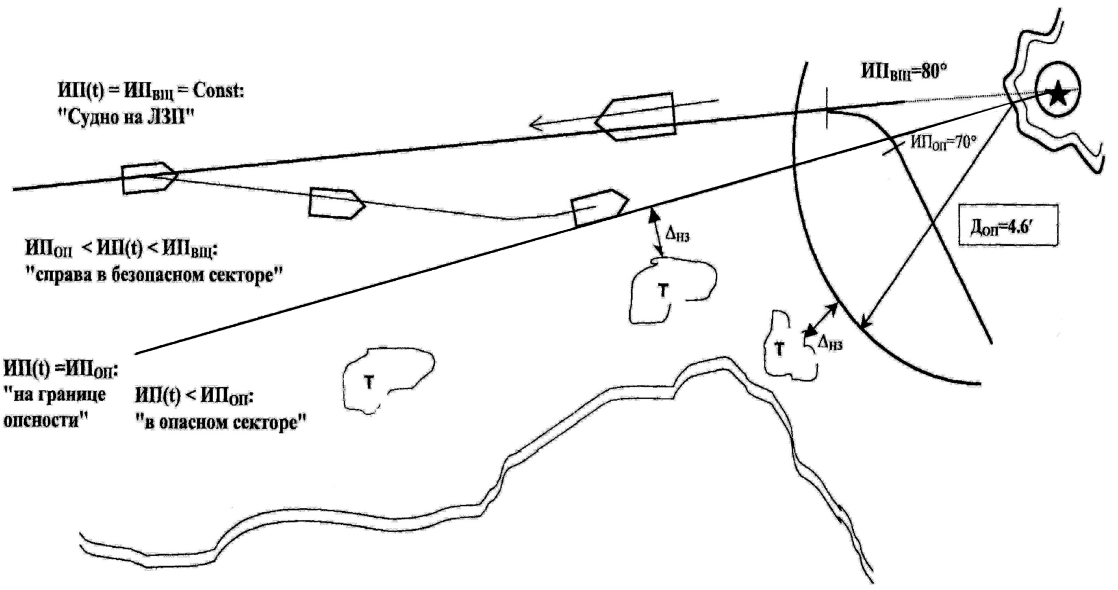
Ограждающая изолиния или линия положения (ОЛП) служит для непрерывного оперативного контроля за положением судна относительно кромок фарватера или навигационных опасностей путем измерения (контроля) только одного навигационного параметра (рис. 4). Тем самым оперативно контролируется предел безопасного отклонения судна от ЛЗП под воздействием гидрометеорологических факторов или при расхождении с другими судами. Примерами ОЛП являются щелевой створ, секторный огонь (с разным цветом огня в опасных и безопасных секторах), ограждающая изобата, и др.
При выполнении предварительной прокладки ОЛП выбирается таким образом, чтобы:
- Выбранный ориентир заблаговременно обнаруживался, надежно опознавался и мог непрерывно наблюдаться в течение всего требуемого времени;
- Один и тот же метод и ориентир использовались бы для контроля как ВЩ ЛП, так и ОЛП;
- ОЛП была параллельна или почти параллельна ЛЗП;
- ОЛП проходила с некоторым “навигационным запасом” (ΔНЗ) от границ навигационной опасности (в зависимости от предельных погрешностей ОЛП, стесненности судоходного пространства, степени изученности района);
- ОЛП обеспечивала необходимую быстроту, точность, надежность и однозначность контроля.
Выбранная ОЛП прокладывается на карте. Снимается с карты или рассчитывается ограждающее (“опасное”) значение навигационного параметра (ИПОП = 70° на рис. 4), устанавливается закон изменения параметра в зависимости от величины смещения судна с ЛЗП. При следовании данным участком плавание судна осуществляется по ведущей изолинии; однако, если возникает необходимость отклонения от ЛЗП – например, при расхождении с другим судном, – начинается контроль ОЛП с тем, чтобы в любой момент времени контролировать безопасность такого отклонения и его допустимый предел.
Контрольная изолиния или линия положения (КЛП) служит для оперативного контроля момента выхода судна в точку начала поворота путем измерения (контроля) только одного навигационного параметра (рис. 5).
КЛП выбирается таким образом, чтобы:
- Выбранный ориентир заблаговременно обнаруживался, надежно опознавался и мог непрерывно наблюдаться в процессе поворота;
- Направление КЛП было возможно ближе к направлению пути после поворота (τКЛП→ПУ2);
- Один и тот же метод и ориентир использовались бы (по возможности) и для контроля поворота, и в качестве ведущей изолинии после завершения поворота;
- Контролировать тот навигационный параметр, который по мере подхода судна к повороту изменяется быстрее (например, дистанцию до ориентира на острых носовых и кормовых курсовых углах либо пеленг ориентира вблизи траверза);
- КЛП обеспечивала необходимую быстроту, точность, надежность и однозначность контроля начала поворота.
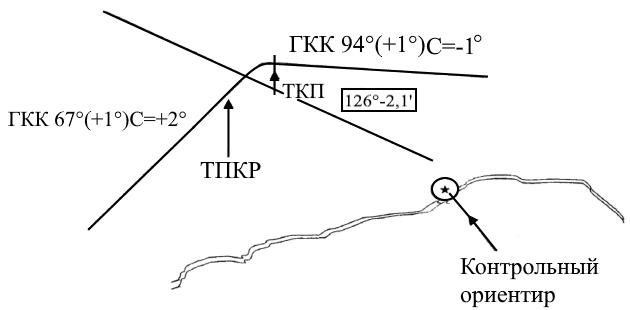
При выполнении предварительной прокладки на карте намечаются точки начала и конца поворота на новый курс. В точку поворота (точку подачи команды на руль) проводится КЛП от выбранного ориентира, рассчитывается (снимается с карты) и надписывается значение контрольного навигационного параметра. Учитывая важность операции поворота, дополнительно на подходе предвычисляют время и отсчет лага (ТП/ОЛП) на момент начала поворота. Предусматривается также возможность контролировать боковое смещение с ЛЗП перед подходом к повороту и обязательное определение места судна (обсервация) после завершения поворота.
При подходе к повороту контролируется 4 параметра – ИПК, Дк, Тп, ОЛп, – причем в ситуации рис. 5 основным параметром будет ИПК = 126°. При этом совпадение дистанции с расчетной укажет, что судно перед поворотом находится на ЛЗП, а совпадение ТП/ОЛП с расчетными — на отсутствие промаха (в том числе – в опознании контрольного ориентира).
Точность определения момента выхода в точку начала поворота зависит от СКП КЛП
а также от возможного смещения судна с ЛЗП (Δ1) перед поворотом (рис. 6). Так, при Δ1 = const боковое смещение судна с ЛЗП после поворота (Δ2) зависит от выбора контрольного ориентира: (Δ2)A>(Δ2)В>(Δ2)С, причем если поворот выполняется на пеленге ориентира “С”, одновременно являющемся ведущим для ПУ2, то при любом (Δ1) получим (Δ2)С→0.
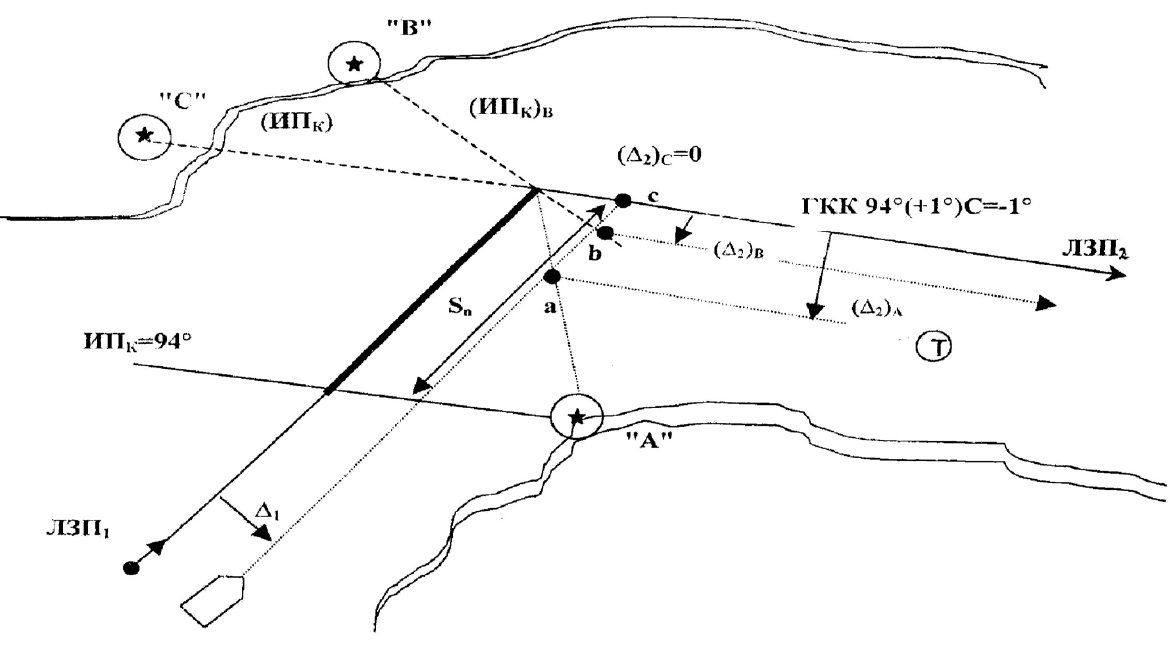
Аналогичный эффект можно получить, используя принцип “параллельного пеленга”: проложить от ориентира “А” контрольный пеленг ИПк = ПУ2 = 94°, снять расстояние (SП) от этой линии до поворота и рассчитать (tП, РОЛП). Тогда, зафиксировав Т0/ОЛ0 в момент пересечения контрольного пеленга, поворот выполняют лишь по времени и по отсчету лага: ТП=Т0+tП; ОЛП =ОЛ0 + РОЛП.
Однако необходимо учитывать, что чем больше (tП), тем больше погрешности предвычисления (ТП/ОЛП), особенно при плавании в условиях ветра и течения.
Таким образом, правильно подобранная комбинация ведущих, ограждающих, контрольных изолиний способна обеспечить эффективный контроль за местоположением и движением судна, не прибегая к навигационным обсервациям. На прямолинейном курсе контролируется соответствующая ВЩЛП (контроль и минимизация боковых уклонений судна с ЛЗП), при вынужденном отклонении от ЛЗП контролируется ОЛП (предел безопасного отклонения); перед подходом к повороту усиливается контроль за движением судна вдоль ЛЗП, при этом КЛП позволит зафиксировать момент выхода судна в точку начала поворота (рис. 7).
Методы глазомерной лоцманской проводкиПлан лоцманской проводки (“ориентирования”) основаны на детальном знании района плавания, глазомерном определении положения осевой линии и границ фарватера относительно выбранных навигационных ориентиров, быстрой глазомерной оценке зоны, в которой на данный момент находится судно. С учетом меняющихся навигационных условий судоводитель корректирует курс и скорость судна с тем, чтобы удерживать судно (или начало развертки на экране РЛС при радиолокационных методах) в пределах заданной полосы движения.
Важнейшим достоинством лоцманских методов контроля за местоположением и движением судна является их высокая оперативность, возможность решения задач навигации и управления судном отрыва судоводителя от наблюдения за навигационной обстановкой, возможность мгновенной оценки не только положения, но и тенденции движения судна.
Однако важнейшим ограничением “лоцманских” методов является их недостаточная надежность: вся текущая информация сосредотачивается, хранится, перерабатывается в голове человека, управляющего судном (капитана, лоцмана), поэтому любая его ошибка, связанная с каким-то отвлечением, прической усталостью, пропуском важной информации, и т. п., немедленно провоцирует ошибочные действия по управлению судном. “Лоцманские” методы требуют более глубокой, тщательной и полной проработки перехода и предварительной прокладки. Кроме того, “лоцманские” методы (в отличие от “штурманских”) решают задачу частично, не позволяя получать всех параметров, характеризующих текущее местоположение и движение судна, и практически не поддаются алгоритмизации и автоматизации.
Выбор оптимальных методов контроля за местоположением и движением судна определяется условиями плавания. В открытом море, где требование оперативности контроля не является определяющим, используются только “штурманские” методы. В прибрежном плавании “штурманские” методы по-прежнему являются главными, однако начинают использоваться элементы “лоцманских” методов – КЛП для контроля поворотов и ВЩ ЛП (например, “Параллельное индексированиеПараллельное индексирование“) в промежутках между навигационными обсервациями.
Читайте также: Оформление предварительной прокладки и «Подъема карт»
Ситуация принципиально изменяется в стесненных водах: главным требованием становится оперативность контроля, местоположение судна оценивается не в географических, а в полярных и маршрутных координатах, поэтому судоводитель, управляющий судном (капитан, лоцман), использует только «лоцманские» методы. Однако вахтенный помощник капитана обязан при этом применять обычные штурманские методы. Такое дублирование контроля за местоположением и движением судна имеет целью, во-первых, своевременное обеспечение капитана необходимой навигационной информацией, а во-вторых (и это не менее важно!), – своевременное обнаружение ошибок в управлении судном. В случае появления сомнений в обстановке или обнаружении обстоятельств, существенных для обеспечения безопасности плавания судна, вахтенный помощник обязан немедленно докладывать капитану.
Увеличение числа судоводителей на мостике в сложных условиях плавания, четкое распределение обязанностей между ними, действенная система дублирования контроля за местоположением и движением судна способны до определенной степени объединить достоинства “штурманских” и “лоцманских” методов контроля, снять их существенные ограничения. Однако полное устранение противоречия между ними, обеспечение полноты, объективности, наглядности навигационной информации без запаздывания по времени, исключение возможных промахов (минимизация “человеческого фактора”) возможно лишь за счет автоматизации получения, обработки и представления навигационных данных. Перспективной технической основой представляется “комплексный индикатор навигационной обстановки”, включающий видеопрокладчик с “электронной картой”, на которую накладывается информация с РЛС/САРП и выводятся основные цифровые параметры, характеризующие текущее местоположение и движение судна по данным спутниковой РНС второго поколения («ГЛОНАСС»/”НАВСТАР”).





