Контроль местоположения судна в рейсе критически важно для безопасности морских путей, судов и экипажей. Метод “Параллельного индексирования” (“Parallel Indexing Technique” = “РI”) является эффективным ускоренным (“лоцманским“) методом контроля за местоположением и движением судна с помощью судовой РЛС.
Что такое параллельное индексирование?
“Параллельное индексирование” позволяет судоводителям оперативно и непрерывно, без отрыва от наблюдения за обстановкой, без каких-либо графических построений и расчетов, контролировать, что судно действительно следует по линии заданного пути (ЛЗП) или в безопасном “маршрутном коридоре“, а в случае необходимости – принимать своевременные корректирующие действия.
Метод “PI” основан на использовании закономерностей радиолокационного изображения и закономерностей движения эхо-сигналов Звездный глобус: как ориентироваться среди звездрадиолокационных ориентиров на экране судовой РЛС:
- если судовая РЛС работает в режиме (“Истинное движение” – “Север“), то эхо-сигналы неподвижных ориентиров на экране также неподвижны, а наше судно (центр радиолокационной развертки) будет перемещаться по экрану РЛС со своим вектором скорости
V - если судовая РЛС работает в режиме (“Относительное движение” – “Север“), то наше судно (центр радиолокационной развертки) будет на экране неподвижно, а эхо-сигналы неподвижных ориентиров будут “плыть” по экрану РЛС в направлении, обратном движению нашего судна (–
V
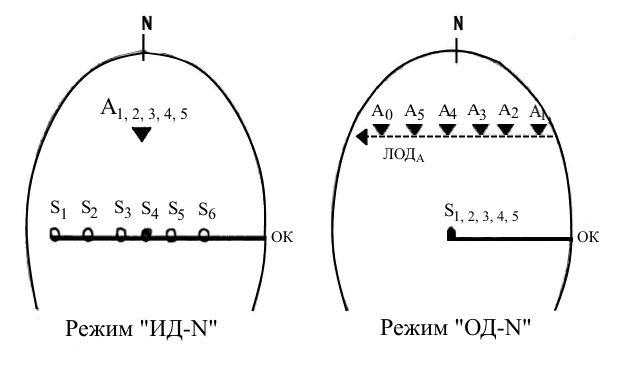
а – в режиме “Истинное Движение – Север”; b – в режиме “Относительное Движение – Север”
Для “РI” могут использоваться различные типы визиров, применяемых в судовых РЛС (механические, центральные электронные, выносные электронные визиры), а также “электронные линии” и (в временных РЛС) – специальные режимы “РI“.
“Классический” механический визир с “системой параллельных линий” показан на рис. 2. Вся “система” разворачивается вокруг центра экрана РЛС (ручка “Пеленг“) и может быть выставлена на любое желаемое направление “τ“. Количество “параллельных линий” соответствует количеству “неподвижных колец дальности” (“НКД“), а расстояние между линиями (l) соответствует “шагу” НКД (т. е. зависит от установленной судоводителем шкалы дальности).
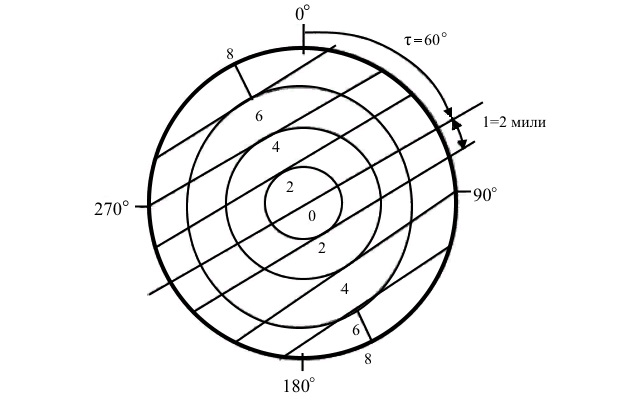
визир развернут на направление τ – 60 °; – оцифровка линеек соответствует шкале дальности 8 миль
Точность параллельного индексирования зависит от ряда факторов, таких как размер индекса, частота обновления данных, алгоритмы индексирования и аппаратное обеспечение.
Алгоритм “Параллельного индексирования” применительно к режиму “Относительное движение – Север” (рис. 1, b) с использованием механического визира с системой параллельных линий (рис. 2).
Читайте также: Снятие судна с мели
Пусть наше судно должно следовать в соответствии с Планирование перехода судна в различных условияхпредварительной прокладкой, представленной на рис. 3, а. В качестве ориентира используется северная оконечность островка “А”.
На карте прокладываются:
- Линия заданного пути (Ген К 082 °);
- Левая граница “безопасного маршрутного коридора” на некотором удалении от “осевой линии” фарватера;
- Правая граница “безопасного маршрутного коридора” на некотором удалении от навигационных опасностей
τ - “Базовая линия” через ориентир (“А”), проведенная параллельно ЛЗП («РI» = 082 °);
- От “базовой линии” рисуются, измеряются и надписываются так называемые “кроссиндексы“:
- От “базовой линии” до ЛЗП, т. е. “ведущее расстояние” (4,0 м. мили);
- От “базовой линии” до правой границы “безопасного маршрутного коридора” (2,0 м. мили), т. е. ограждающая дистанция справа;
- От “базовой линии” до левой границы “безопасного маршрутного коридора” (5,4 м. мили), т. е. ограждающая дистанция слева.
При повороте на данное “колено” фарватера:
- Рассчитывается (с учетом вероятных элементов сноса) и задается рулевому новый Электронавигационные приборыгирокомпасный курс (например, ГКК = 78 °);
- Центральная нить механического визира выставляется на отсчет
после чего визир не трогать;
- Устанавливается выбранная шкала дальности судовой РЛС (8 миль);
- Для выбранной шкалы дальности намечаются три главных линейки (соответственно “кросс-индексам“):
- “ведущая линейка” (4,0 мили от центра развертки);
- “ограждающая линейка справа” (2,0 мили от центра);
- “ограждающая линейка слева” (5,4 мили от центра).

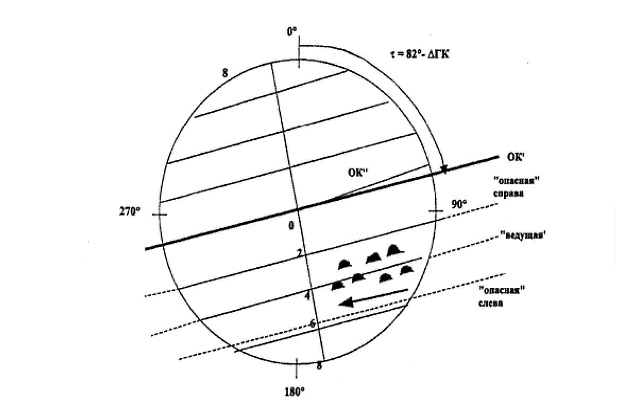
Эти линейки определяют ЛЗП и границы “безопасного маршрутного коридора” на экране судовой РЛС.
Если эхо-сигнал “опорного” ориентира “А” перемещается по “ведущей” линейке, то это означает, что судно движется по намеченной линии заданного пути, в соответствии с предварительной прокладкой.
Если эхо-сигнал ориентира “уходит” от “ведущей” линейки в ту или иную сторону, это означает, что судно смещается в сторону с ЛЗП и необходима коррекция курса.
Так, если эхо-сигнал ориентира смещается с линейки ближе к центру развертки, то это означает, что судно уходит с ЛЗП в сторону ориентира, т. е. вправо на рис. 3. В таком случае следует “подворачивать” влево, добиваясь, чтобы эхо-сигнал ориентира опять пошел по “ведущей линейке” (при этом “отметка курса” займет какое-то положение “ОК“).
Предлагается к прочтению: Выбор и планирование методов контроля за местоположением и движением судна
В любом случае судно маневрирует курсом, но выставленную на заданный отсчет линейку визира трогать не следует.
Таким образом обеспечивается непрерывный контроль за местоположением и движением судна при плавании по линии заданного пути.
До тех пор, пока Радиолокационные станции и средства автоматической радиолокационной прокладкиэхо-сигнал ориентира перемещается в интервале между “правой” и “левой” ограждающими линейками, это означает, что судно на местности следует в “безопасном маршрутном коридоре“.
Следовательно, если для расхождения с другим судном (либо по какой-то другой причине) наше судно вынуждено отклониться от ЛЗП, то можно безопасно уходить в сторону до тех пор, пока на экране РЛС эхо-сигнал ориентира не дойдет до намеченной “опасной линейки“.
Таким образом, обеспечивается непрерывный контроль за местоположением и движением судна при вынужденном маневрировании.
Даже один ориентир может обеспечить навигационный контроль при плавании по нескольким курсам.
Например на рис. 3, при повороте на следующее “колено” фарватера (Ген К = 120 °) по аналогичной методике используется новая “базовая линия” («РI» = 120 °) и “тройка” новых “кросс-индексов” (4,0 мили, 5,4 мили, 8,0 мили).
При “параллельном индексировании” СКО ведущей линии положения (mвщлп) определяется формулами:
- При движении эхо-сигнала по линейке визира
- При “симметричном” движении эхо-сигнала, т. е. посередине между двумя линейками
- При “несимметричном” движении эхо-сигнала между двумя линейками
где:
- диаметр экрана ИКО РЛС, мм;
- Дшк – установленная шкала дальности РЛС, мили;
- C – знаменатель масштаба радиолокационного изображения, м. мили/мм;
- l – расстояние между соседними линейками (между “НКД“) при данной шкале дальности, мили.
Пусть, например, Ø = 600 мм, Дшк – 8 миль, l = 2 мили. Если при этом “ведущее расстояние” равно 4,0 милям (как на рис. 3), то эхо-сигнал ориентира должен двигаться по ведущей линейке. Тогда замечаемое смещение судна с ЛЗП будет
Если “ведущее расстояние” равно 5,0 милям, то эхо-сигнал ориентира должен будет двигаться посередине между линейками, а судоводитель будет оценивать “симметричность” на глаз. Тогда замечаемое смещение судна с ЛЗП существенно увеличивается:
Если же “ведущее расстояние” будет, например, 5,4 мили (как на последнем курсе рис. 3), то судоводитель будет оценивать местоположение эхо-сигнала ориентира на экране РЛС, глазомерно деля интервал между соседними линейками в соотношении 1:2. При таком “несимметричном” движении эхо-сигнала точность ведущей линии положения будет наихудшей:
Таким образом, если есть возможность, то следует прокладывать линии заданного пути на “круглых” расстояниях от выбранного опорного ориентира с тем, чтобы упростить “РГ” (эхо-сигнал пойдет по линейке) и повысить точность проводки.
При наличии на экране РЛС накладного оптического планшета можно выставить подвижный круг дальности (“ПКД“) на любую желаемую “ведущую” дистанцию и с помощью специального карандаша-стеклографа провести “ведущую” линейку с заданным направлением (т) по касательной к “ПКД“.
Точность проводки судна по ЛЗП будет в критической степени зависеть от точности проведения такой “ведущей линейки” на экране РЛС.
Следует иметь в виду, что “ведущие линейки” для “параллельного индексирования“, проведенные карандашом на накладном оптическом планшете, применимы только к одной шкале дальности РЛС. Другим шкалам дальности будут соответствовать другие “ведущие линейки” при одном и том же значении “кросс-индекса“. Следовательно, применяя методы “РГ“, необходимо обращать особое внимание на используемую шкалу дальности и соблюдать особые предосторожности при переключении шкал.
Аналогичным образом, «РI» может быть использовано и в режиме “Истинное Движение – Север” (стабилизация по грунту). В таком случае выбранный “опорный” ориентир “А” остается неподвижным на экране РЛС, и по мере движения судна (движения начала развертки по экрану РЛС) выставленный на требуемую дистанцию “ПКД” должен “катиться” по “базовой линии“, касающейся ориентира.
Главное достоинство “параллельного индексирования” заключается в том, что данный метод обеспечивает непрерывный и достаточно точный контроль за местоположением и движением судна в прибрежном плавании, СРД и в Предупреждение столкновений в стесненных водахстесненных водах без отрыва от наблюдения за окружающей обстановкой, используя только один приметный (и надежно опознанный) радиолокационный ориентир.
Недостатки и ограничения “параллельного индексирования” могут быть поделены на:
- Технические;
- “Человеческие“;
- Методологические;
- Географические.
Под “техническими” ограничениями понимается необходимость для судоводителя оценить возможность и эффективность “параллельного индексирования” применительно к особенностям визирных устройств и “электронных линий” установленной на его судне конкретной РЛС, применить (адаптировать) к этой РЛС общую методологию “PI” для различных режимов индикации Радиолокация в навигации: от формирования сигнала до отображения информации на индикаторерадиолокационного изображения.
Под “человеческими” ограничениями понимается необходимость высокой профессиональной квалификации судоводителя и практической отработки методов “параллельного индексирования“:
- Изучение теории “параллельного индексирования“;
- Освоение практики “РI” на радиолокационном или навигационном тренажере;
- Адаптация методики “PI” к “своей” РЛС;
- Отработка методов “PI” на судне в простейших условиях плавания, а затем – на более сложных участках (при хорошей видимости и под контролем капитана судна либо СПКМ);
- Применение метода “PI” под контролем КМ или СПКМ;
- Самостоятельное применение методов «PI».
Метод “параллельного индексирования” в критической степени зависит от Судовые документы, обучение и сертификацияквалификации судоводителя, и применение «PI» без должной практической подготовки опасно!
С “методологической” точки зрения “параллельное индексирование” – это один из вариантов ускоренных (“лоцманских“) методов контроля за местоположением и движением судна, поэтому на “PI” в полной мере распространяются все недостатки и ограничения ускоренных методов. В частности, подчеркивается недостаточная надежность метода, т. к. весь контроль сосредоточен в голове одного человека, управляющего судном (“Conning Officer“).
Дублирование контроля требует, чтобы вахтенный ПКМ систематически, с указанной частотой, определял место судна и наносил обсервованные точки на карту.
Применение параллельного индексирования наиболее эффективно при отсутствии существенных “географических ограничений“.
Читайте также: Оформление предварительной прокладки и «Подъема карт»
“Внешнее” ограничение очевидно: для применения “PI” необходим хотя бы один приметный радиолокационный ориентир.
“Параллельное индексирование” в судовых условиях наиболее эффективно в зоне “прибрежного плавания“, т. е. там, где имеется достаточное навигационное пространство, где достаточно протяженные прямолинейные курсы и где радиолокационные методы играют ведущую роль.
Эффективность “параллельного индексирования” стремительно падает в стесненных водах – там, где ведущую роль играет визуальная ориентировка, где прямолинейные курсы становятся короткими, где характерны “затянутые” повороты с большими радиусами кривизны. Если в таких условиях и применяются радиолокационные методы, то более упрощенные – “ведущая линейка“, ведущее/ограждающее кольцо дальности, методы “глазомерной радиолокационной проводки“. Чем чаще и сложнее маневрирование, тем менее надежно и эффективно “параллельное индексирование“. Например, абсурдно требовать “РI” при плавании по рекам с частыми поворотами, изгибами русла и “перевалами“. Также стоит критически рассматривать использование параллельного индексирования на малых судах.
Стоит, однако, заметить, что “внутренний” предел эффективного применения “PI” зависит не только от Мировой Океан и океанотехника. Характеристики морских льдов, течений и волнхарактеристик района плавания, но и от натренированности судоводителя.
В любом случае при использовании “параллельного индексирования” необходимо соблюдать следующие предосторожности:
- Поправка гирокомпаса должна быть надежно известна, влияние погрешности гирокомпаса на результаты параллельного индексирования неоспоримо;
- “Отметка курса” на экране РЛС должна быть согласована с диаметральной плоскостью судна;
- Исправная работа РЛС должна тщательно контролироваться через частые промежутки времени;
- Центр развертки (в режиме “ОД“) должен быть тщательно выставлен в центр индикатора РЛС;
- Точность выставления “НКД” и “ПКД” должна быть тщательно проверена;
- “Опорный” радиолокационный ориентир, относительно которого “планируется параллельное индексирование“, должен быть безошибочно опознан.
Использовать методы “PI” без выполнения указанных выше проводок и без систематического контроля местоположения и движения судна с помощью обсерваций – опасно! Ошибки параллельного индексирования могут привести к непоправимым последствиям.
“Параллельное индексирование” – это простой и наиболее эффективный способ непрерывного контроля за местоположением и движением судна, объединяющий в единую систему ведущий и ограждающие параметры. ПИ может быть использовано в любой ситуации, где имеется хотя бы один приметный радиолокационный ориентир, относительно которого можно эффективно Средства улучшения маневренных характеристик суднаконтролировать движение судна. Однако ПИ требует необходимого опыта, предварительной подготовки и соответствующего “подъема” (разметки) навигационной карты, поэтому обучение параллельному индексированию настолько важный этап в подготовке судоводителей.






Я думаю, что эта информация нужна не только инспекции, но и инспектируемому, вне зависимости от изначальных данных нужно уметь рассчитывать вероятный исход.
Господа, это нужно тем кто будет Вас инспектировать, и для них все равно, какие условия плавания, В ARAMCO вас заставят нанести PI на входной канал West Pier , при учёте того что общее время движения по каналу с разрешённой скоростью 5 уз - примерно 10 мин. И всем наплевать Что : "Эффективность “параллельного индексирования” стремительно падает в стесненных водах – там, где ведущую роль играет визуальная ориентировка, где прямолинейные курсы становятся короткими, где характерны “затянутые” повороты с большими радиусами кривизны. Если в таких условиях и применяются радиолокационные методы, то более упрощенные – “ведущая линейка”, ведущее/ограждающее кольцо дальности, методы “глазомерной радиолокационной проводки”. Чем чаще и сложнее маневрирование, тем менее надежно и эффективно “параллельное индексирование”.
Нахера это нужно, кто-нибудь понял?
эм....нет)
Судя по данной информации зная безопасную дистанцию до опасностей параллельно курсу знаем что на определенный ориентир мы по рлс можем идти указав безопасный коридор и уже менять курс туда сюда в зависимости от информации с радаров когда на эти параллели наезжает берег или удивляется от него. Таким образом рос даёт информацию по тому правильно ли мы двигаемся или нас сносит, уходим с курса и по. и корректировать по ситуации наш путь. Но это не точно)