Характеристики гребных винтов определяются по установленным параметрам, приведенным ниже, вычисление которых необходимо для точного подбора гребного винта для малотоннажных судов.
Расчет гидродинамических характеристик ГВ и построение паспортных диаграмм
После выбора основных элементов ГВ для проверки их соответствия сопротивлению катера и его механической установке определяют кривые действия проектируемого винта в свободной воде в виде зависимостей коэффициента упора K1, коэффициента момента K2 и КПД ηp от относительной поступи λp, а также производят расчет и построение паспортной диаграммы. Для расчета кривых действия ГВ используют один из наиболее распространенных способов – серийные диаграммы K1-λp, по которым выбирались элементы винтов и производился расчет ходкости, или паральный метод Папмеля. При использовании серийных диаграмм значения K1 и ηp снимают непосредственно с расчетной диаграммы в зависимости от относительной поступи винта λp и его шагового отношения H/D или H1/D.
Соответствующие значения коэффициента момента K2 находят расчетом по следующей схеме:
При проектировании ГВ и расчете их кривых действия по серийным диаграммам необходимо стремиться к тому, чтобы выбранные элементы и характеристики проектируемых винтов возможно больше соответствовали диаграммным. Однако во многих случаях полного совпадения всех элементов винтов обеспечить не удается, что снижает надежность расчета.
Для повышения достоверности определения гидродинамических характеристик и возможности учета влияния конкретных конструктивных особенностей проектируемого винта на его работу Э. Э. Папмель разработал специальный эмпирический метод расчета кривых действия ГВ, названный паральным.
Паральный метод позволяет при небольшой затрате времени получить с практически достаточной точностью кривые действия некавитирующих ГВ по их основным конструктивным элементам, которые считаются известными, т. е. должны быть заданы или предварительно определены. К числу этих элементов относятся диаметр винта, шаг, дисковое отношение, количество лопастей, элементы эквивалентного профиля и т. д.
Паральным методом целесообразно пользоваться также при отсутствии необходимых расчетных диаграмм, особенно в процессе доводки винтов при проведении натурных ходовых испытаний, когда элементы винтов вследствие их обрезки по диаметру претерпевают существенные изменения.
В основе парального метода находится та же идея, что и у изложенного ранее метода проектирования кавитирующих винтов, т. е. что реальная лопасть каждого ГВ может быть заменена условным эквивалентным крыльевым профилем, полностью характеризующим действие всей лопасти винта. Кривые действия такого профиля будут подобны кривым действия всего винта в целом.

Если площадь условного элемента лопасти bdr увеличить до суммарной площади всех лопастей, то его безразмерные характеристики dK1 и dK2 будут эквивалентны характеристикам всего винта и могут рассматриваться как изображенные в масштабе коэффициенты упора K1 и момента K2.
Важнейшей характеристикой для расчета кривых действия винта по паральному методу является условная относительная толщина эквивалентного профиля δ′, вычисляемая не по действительной ширине лопасти на приведенном радиусе b, как это имело место в изложенном методе расчета кавитационных характеристик, а по средней ширине лопасти bcp, определяемой формулой 3:
где:
e — наибольшая толщина лопасти на приведенном радиусе
В результате анализа большого количества экспериментальных материалов Папмель установил, что зависимость коэффициента упора винта K1 от скольжения относительно шага нулевого упора s1 изменяется почти по линейному закону, а тангенс угла наклона прямой K1 пропорционален шаговому отношению нулевого упора:
Коэффициент момента K2 выражается аналогичной зависимостью:
Согласно приведенным выражениям КПД винта:
где:
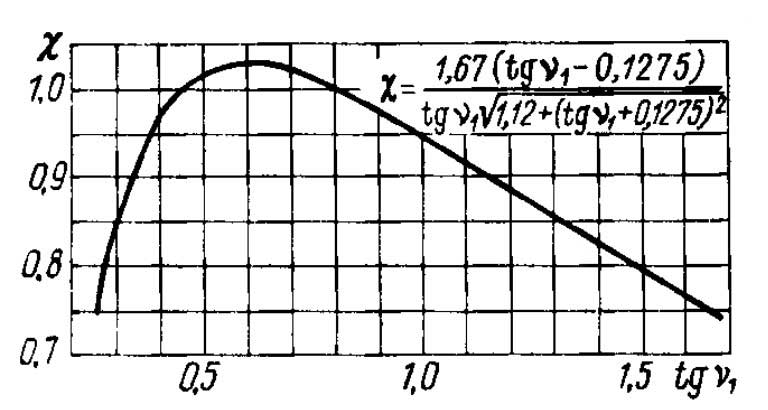
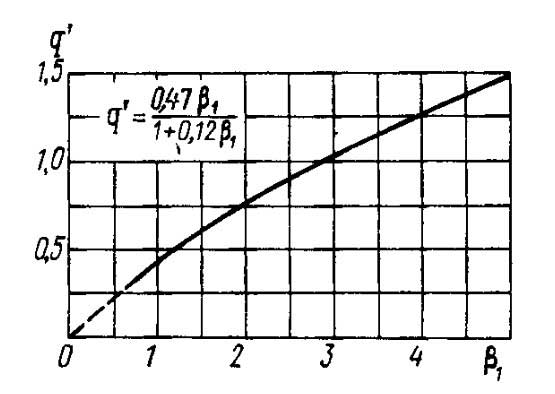
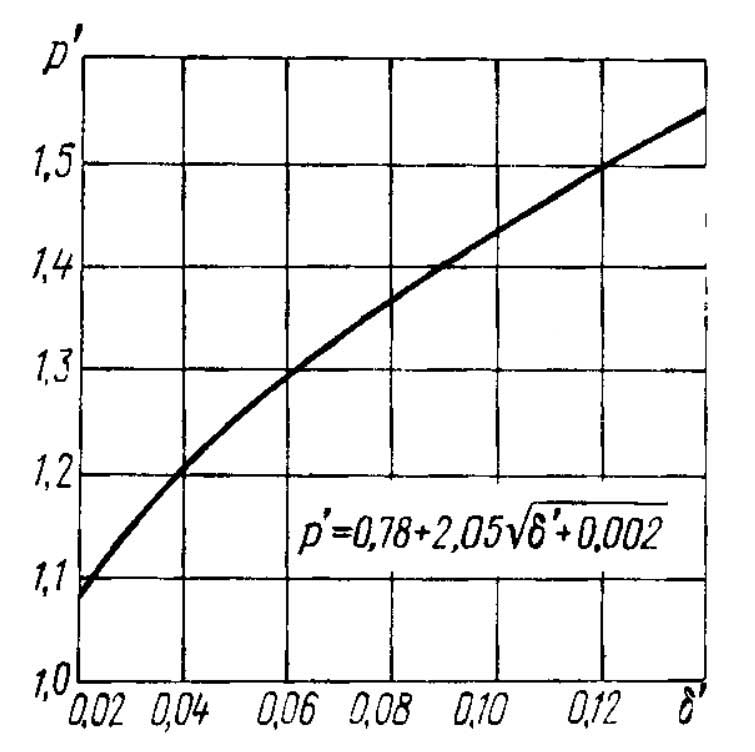
Коэффициенты x, q′, F и p′ определяют графически по рис. 1-4 или находят по формулам:
Для трехлопастных винтов принимают:
где:
- — характеристика удлинения лопасти.
Для двухлопастных ГВ:
Для определения парали m рекомендуется выражение:
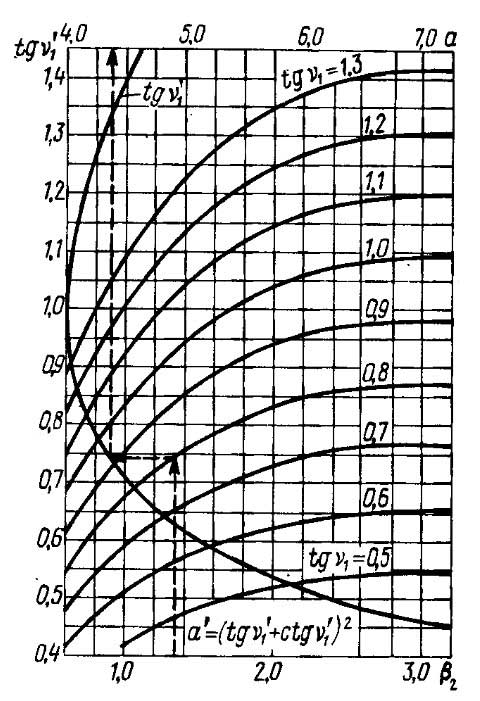
Величины:
и
могут быть вычислены или найдены по рис. 5 как функции tg ν1 и β2.
Далее вычисляют вспомогательные коэффициенты:
Рациональная форма для расчета кривых действия ГВ по паральному методу представлена в табл. 1. Задаваемый в строке 33 ряд значений скольжения S1 должен охватывать все необходимые режимы поступи ГВ.
Для определения параметра:
| Таблица 1. Расчет кривых действия ГВ по паральному методу | |||||
|---|---|---|---|---|---|
| 1 | D, м | 21 | H1/D=H/D+4δ0 | ||
| 2 | H, м | 22 | tg ν1, по формуле “Определение конструктивного шага сечения лопасти, расположенного на радиусе r“ | ||
| 3 | z | 23 | |||
| 4 | dc, м | 24 | a′ по формуле 14 | ||
| 5 | R0, м | 25 | m по формуле 12 | ||
| 6 | A, м2 | 26 | χ по формуле 7 | ||
| 7 | e1, м | 27 | q′ по формуле 8 | ||
| 8 | e2, м | 28 | F по формуле 9 | ||
| 9 | e = e1-e2, м | 29 | p′ по формуле 10 | ||
| 10 | b на R0, м | 30 | |||
| 11 | δ = e/b | 31 | A1 по формуле 15 | ||
| 12 | δ0 по формуле “Измерение длины профиля b, вдоль кромочной линии” | 32 | A2 по формуле 16 | ||
| 13 | bcp по формуле “Определение отношения площади лопасти к ее длине” | 33 | s1 | ||
| 14 | δ′ = e/bcp | 34 | s1+m | ||
| 15 | H/D | 35 | σ по формуле 17 | ||
| 16 | 36 | λp по формуле 13 | |||
| 17 | Θ = A/Ad | 37 | K1 = A1σs1 | ||
| 18 | R/bcp | 38 | K2 = A2 σ(s1+m) | ||
| 19 | β1 по формуле 11 | 39 | ηp по формуле 5 | ||
| 20 | β2 по формуле 11 | ||||
На рис. 6 приведена разработанная Папмелем специальная диаграмма. Полученные в результате расчета кривые действия винта в свободной воде обычно представляют графически в зависимости от относительной поступи λp. Примерный вид таких кривых показан на рис. Гребные винты малотоннажных судов“Кривые действия гребного винта в свободной воде”.
Рекомендуемый порядок расчета в основном соответствует схеме Папмеля с небольшими изменениями в части определения шагового отношения нулевого упора Н1/D и парали m.
Кривые действия позволяют произвести проверку согласованности спроектированных ГВ с сопротивлением корпуса катера и характеристиками его механической установки. Такая проверка осуществляется при помощи расчета и графического построения ходовых характеристик, совокупность которых называют паспортной диаграммой.
Предлагается к прочтению: Гидроаэродинамика парусного судна
Паспортная диаграмма показывает, правильно ли подобраны ГВ и позволяют ли они обеспечить катеру необходимую скорость при заданных значениях мощности и частоты вращения двигателей. Кроме того, паспортная диаграмма позволяет проанализировать действие спроектированных гребных винтов при изменении тех или иных условий эксплуатации судна. Для построения паспортной диаграммы необходимо иметь следующие зависимости.
1 Кривые изменения полезной тяги ГВ Pe = f(νк) и мощности двигателей Ne = f(νк) в зависимости от скорости судна при различных постоянных значениях частоты вращения двигателей nдв = const.
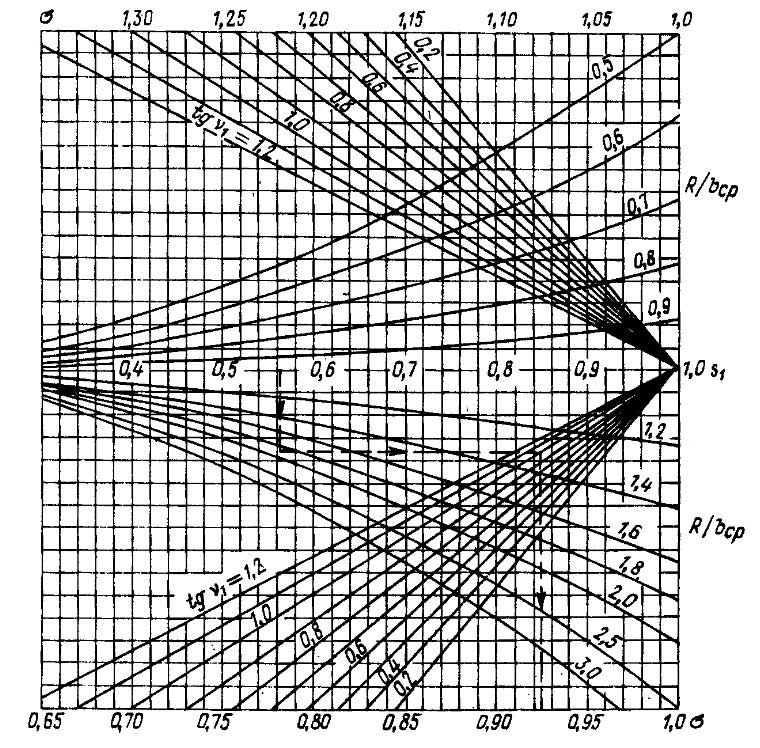
Ключ: s1→ R/bcp→ tg v1 → σ
0,562 → 1,88 → 1,00 → 0,924
2 Кривые сопротивления корпуса судна R = f(νк) при различных водоизмещениях и условиях плавания.
Таблица 2. Расчет паспортной диаграммы ГВ (D, м; H, м; ) | ||||||
|---|---|---|---|---|---|---|
| w, t | nдв, об/мин | |||||
| n, c-1 | ||||||
| 10-3 ρn2D4, кН | ||||||
| λp, K1 | ||||||
| ηp, t | ||||||
| ηк, η | ||||||
| Таблица 3. Расчет паспортной диаграммы кавитирующего ГВ (D, м; H1/D; Θ; z; δ; δ1) | ||||
|---|---|---|---|---|
| w | t | nдв, об/мин | ||
| ηк | ηм | n, c-1 | ||
| p | ip | 10-3ρn2D4, кН | ||
| λp | K1 | νк = A3λpnдв, км/ч | ||
| ηp | ηpηкηм | |||
3 Внешнюю, или ограничительную, характеристику двигателя Ne = f(nдв).
Скорость катера или лодки νк, км/ч, полезную тягу одного винта Pe, кН, и соответствующую мощность двигателя Ne, кВт, для выбранных значений λp и nдв при отсутствии кавитации определяют по следующим формулам:
При расчете паспортной диаграммы кавитирующего ГВ дополнительно для каждого значения скорости определяют:
число кавитации
критическую относительную поступь ГВ:
отношение расчетной поступи винта к его критической поступи:
коэффициенты уменьшения упора и КПД винта от влияния кавитации:
Тягу ГВ и необходимую мощность с учетом действия кавитации вычисляют по формулам:
По результатам расчета производят построение паспортной диаграммы в виде суммарных или отнесенных к одному винту характеристик тяги Pe = f(νк) и потребной мощности Ne = f(νк) при постоянных значениях частоты вращения двигателей. При этом характеристики тяги и мощности строят в одинаковом масштабе скорости судна νк (рис. 7).
Точки пересечения Тяговые характеристики буксирных судовтяговых характеристик с кривой сопротивления R = f(νк), приходящегося на один винт, построенной в тех же координатах, определяют скорости катера при соответствующих значениях частоты вращения двигателей. Мощность двигателей, необходимую для обеспечения полученных скоростей судна, определяют по характеристикам Ne = f(νк) при тех же частотах вращения.
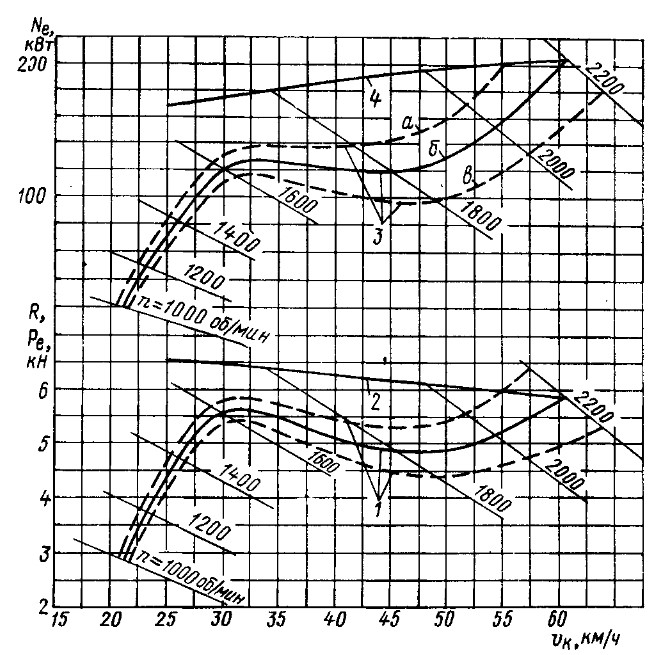
а – тяжелый винт; б – согласованный винт; в – легкий винт.
1 – кривые сопротивления КПК; 2 – предельная тяговая характеристика; 3 – винтовые характеристики; 4 – внешняя характеристика двигателя
Соединив эти точки плавной кривой, можно построить винтовую характеристику Ne = f(νк, nдв), выражающую зависимость мощности двигателя от частоты его вращения и скорости движения катера при заданных условиях эксплуатации. Каждой кривой сопротивления катера соответствует своя винтовая характеристика, поэтому с изменением по тем или иным причинам кривой сопротивления изменяется и винтовая характеристика. При наличии внешней или ограничительной характеристики, определяющей возможные режимы работы двигателя при эксплуатации катера, целесообразно построить ее на паспортной диаграмме совместно с винтовой характеристикой. Соответственно в координатах Pe-νк строят предельную тяговую характеристику Pe = f(νк, nдв).
Паспортная диаграмма позволяет решать следующие задачи, связанные с проектированием ГВ и анализом их действии в различных условиях эксплуатации катеров и моторных лодок.
- Устанавливать соответствие гребного винта заданным условиям проектирования и проверять достижение максимальной скорости катера при заданных значениях мощности и частоты вращения двигателя. При этом паспортная диаграмма наглядно показывает, что если винт при номинальной частоте вращения не расходует всей заданной мощности двигателя, то он является гидродинамически легким и должен быть утяжелен путем увеличения диаметра или шага. Если же винт использует всю заданную мощность при уменьшенной частоте вращения, то он является гидродинамически тяжелым и его необходимо облегчить.
- Определять режимы работы двигателей и скорости катеров и моторных лодок при изменении в процессе эксплуатации их водоизмещения, центровки, состояния обшивки корпуса, состояния погоды и т. д. Принципиально все указанные изменения приводят к изменению величин сопротивления на различных скоростях. Поэтому для решения возникающих задач и построения новых винтовых характеристик достаточно нанести на паспортную диаграмму в координатах R – νк измененную кривую сопротивления, приходящегося на один винт, и точки пересечения ее с кривыми тяги Pe перенести при тех же скоростях на соответствующие характеристики мощности Ne = f(νк). При этом точки пересечения винтовых характеристик с заданной внешней или ограничительной характеристикой мощности будут определять наибольшие скорости судна и возможные режимы работы двигателей.
- Устанавливать зависимость скорости катера или лодки от частоты вращения двигателей при различных водоизмещениях и изменении условий плавания. Возможность определения величин скорости судна и необходимой для их достижения мощности на любом промежуточном режиме работы двигателей позволяет производить проектные расчеты дальности плавания и решать другие эксплуатационные задачи.
- Определять запасы мощности двигателей КПК как на горбе сопротивления, так и на максимальной скорости, а также осуществлять проверку возможности выхода их на крылья при различных водоизмещениях и различных состояниях погоды. Данные задачи также решаются с помощью построения на паспортной диаграмме соответствующей винтовой характеристики. Для обеспечения выхода катера на крылья необходимо, чтобы винтовая характеристика в районе горба сопротивления всегда была ниже внешней характеристики. При пересечении винтовой характеристики с внешней катер на крыльях не выйдет, так как необходимая для этого мощность будет больше располагаемой. Запас мощности на любом режиме движения КПК определяется величиной превышения внешней характеристики над винтовой.
- Исследовать ходкость двух- или трехвальных судов на парциальных режимах, т. е. при ходе под одним или двумя винтами. Для этого на паспортной диаграмме строят кривые увеличенного сопротивления катера или лодки, приходящегося на один работающий ГВ, и соответствующие винтовые характеристики, по которым определяют скорость судна, а также мощность и частоту вращения работающих двигателей. При этом необходимо следить, чтобы не возникала их перегрузка. Сопротивление воды при движении на парциальных режимах складывается из полного сопротивления судна и сопротивления неработающих винтов.
Сопротивление застопоренных ГВ, Н:
При свободном вращении неработающих винтов их сопротивление уменьшается примерно в два раза. При применении подвесных двигателей неработающие моторы следует вытаскивать из воды.
Если полученный в результате анализа паспортной диаграммы ГВ удовлетворяет всем необходимым требованиям задания, то на этом выбор его основных гидродинамических элементов можно считать законченным. На основании произведенных расчетов определяют конструктивные элементы винта и разрабатывают его рабочие чертежи.
Спрямленный контур и прочный профиль лопасти
Для выполнения рабочих чертежей ГВ помимо его основных элементов — диаметра, шага, числа лопастей и дискового отношения — необходимы также контур спрямленной поверхности и продольный профиль лопасти. Ординаты контура спрямленной поверхности с заданными величинами дискового отношения Θ и приведенного радиуса R0 ≈ 0,6R могут быть получены по формуле:
где:
— ширина лопасти на заданном радиусе
— относительная ширина лопасти, определяемая по рис. 8 или по табл. 4.
На рис. 8 приведено три типа наиболее употребительных контуров спрямленной поверхности лопасти.
Симметричный контур, близкий по форме к эллиптическому, может быть получен по кривой 1. Применение данного контура для широколопастных ГВ несколько улучшает их антикавитационные качества.
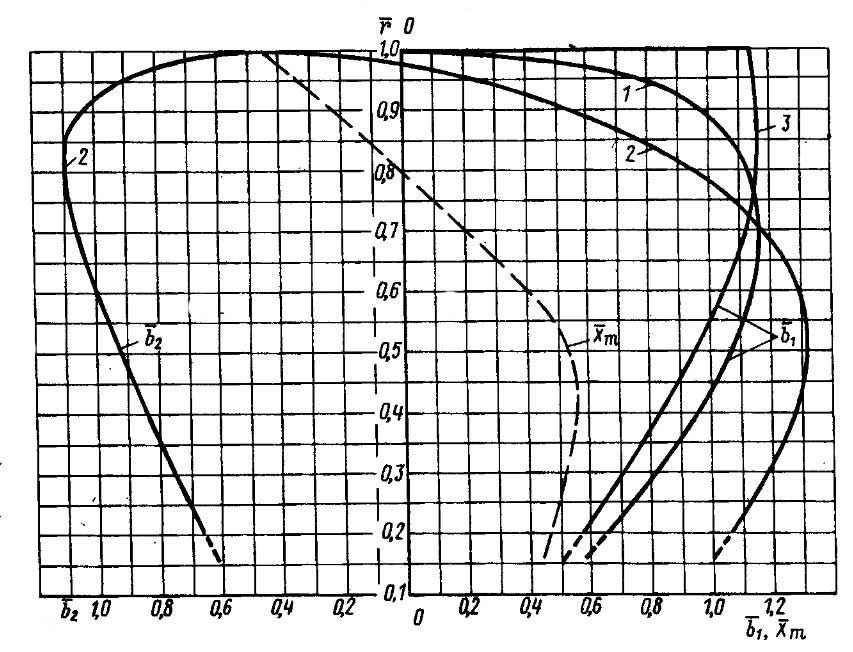
Несимметричный саблевидный контур, применяемый для получения плавного безударного входа лопасти в воду с целью уменьшения вибрации при работе винта вблизи свободной поверхности, может быть построен по кривой 2.
Относительные отстояния входящей и выходящей кромок от осевой линии лопасти О-О характеризуются ветвями
и
, а положение линии максимальных толщин — кривой
Кривая 3 рекомендуется для построения спрямленного контура лопастей ГВ, работающих в направляющих насадках и водометах.
Значения расчетных ординат всех указанных кривых в зависимости от относительного радиуса приведены в табл. 6.
| Таблица 4. Относительные ординаты для расчета контура спрямленной поверхности лопасти ГВ | ||||||
|---|---|---|---|---|---|---|
| Кривая 1 | Кривая 2 | Кривая 3 | ||||
| 0,20 | 1,32 | 1,72 | 1,06 | 0,66 | 0,47 | 1,16 |
| 0,30 | 1,65 | 1,94 | 1,19 | 0,75 | 0,53 | 1,42 |
| 0,40 | 1,92 | 2,12 | 1,28 | 0,84 | 0,56 | 1,68 |
| 0,50 | 2,12 | 2,26 | 1,33 | 0,93 | 0,54 | 1,90 |
| 0,60 | 2,28 | 2,30 | 1,30 | 1,00 | 0,40 | 2,10 |
| 0,70 | 2,32 | 2,24 | 1,18 | 1,06 | 0,20 | 2,24 |
| 0,80 | 2,25 | 2,06 | 0,96 | 1,10 | -0,01 | 2,32 |
| 0,90 | 1,96 | 1,62 | 0,56 | 1,06 | -0,22 | 2,32 |
| 0,95 | 1,62 | 1,18 | 0,26 | 0,92 | -0,33 | – |
| 1,0 | 0 | 0 | -0,45 | 0,45 | -0,45 | 2,28 |
Распределение наибольших толщин вдоль радиуса лопасти называют продольным или прочным профилем лопасти.
Для его построения определяют толщины в трех точках — у корня лопасти вблизи ступицы, на приведенном радиусе R0 и у края на радиусе R.
Толщина лопасти у корня может быть вычислена по приближенной эмпирической формуле:
где:
- P — упор ГВ, Н;
- σп — предел прочности материала ГВ, МПа.
Принятое значение eк, мм, должно быть проверено специальным расчетом на прочность. При этом, во избежание чрезмерного увеличения профильного сопротивления, толщина лопасти у корня не должна превышать значения:
где:
- bк — ширина лопасти у корня.
Толщину лопасти на приведенном радиусе принимают:
Толщина края лопасти устанавливается по конструктивным соображениям и обычно составляет:
Полученные значения толщин позволяют построить прочный профиль лопасти в виде зависимости e = f(r).
Параллельно с выбором прочного профиля решается вопрос о профилировке сечений лопастей. Авиационные профили, благодаря увеличенной кривизне засасывающей стороны и хорошо скругленному носику, имеют более широкий диапазон углов безударного входа, при котором профильное сопротивление является наименьшим. Выбор той или иной формы сечений лопастей определяется относительной толщиной лопасти на приведенном радиусе R0.
Читайте также: Способы расчета управляемости маломерного судна
Для некавитирующих винтов при δ > 0,05 следует принимать авиационный профиль. При δ < 0,05 профиль сечений имеет меньшее значение и может быть принят сегментным. Поэтому для многих ГВ применяют комбинированную профилировку лопастей, при которой сечения на радиусах r < 0,6 имеют авиационный профиль, а на радиусах r > 0,6 — сегментный.
При наличии кавитации ГВ или опасности ее возникновения профилировка лопастных сечений производится с учетом приведенных в статье Гребные винты малотоннажных судов“Проектирование гребных винтов” рекомендаций. Для определения стрелки прогиба средней линии сегментного вогнуто-выпуклого эквивалентного профиля используется формула 45:
Выбор количества гребных винтов, направления их вращения и расположения относительно корпуса
С точки зрения использования мощности двигателя и повышения пропульсивного КПД установка одного ГВ как правило эффективнее, чем двух или трех. Однако в некоторых случаях не удается избежать многовальных установок. Основной причиной этого является отсутствие двигателей и, в частности, подвесных моторов необходимой мощности.
Правда, установка нескольких ГВ имеет и положительные стороны — улучшается маневренность и при парциальной работе повышается экономичность и увеличивается дальность плавания судна.
Направление вращения ГВ также может оказать влияние на поведение судна. Известно, что работающие ГВ при одностороннем вращении вызывают занос кормы в сторону вращения винтов и способствуют появлению крена судна. При этом судно начинает совершать циркуляцию. Величины углов крена зависят от характеристик остойчивости судна и от его скорости. С увеличением скорости углы крена обычно возрастают, так как при числах FrV = 3÷4 характеристики остойчивости во многих случаях ухудшаются, а кренящие моменты растут. Значительных размеров углы крена достигают на относительно узких и легких судах, в особенности с малооборотными винтами большого диаметра. При увеличении относительной ширины судна действие реактивного момента становится менее заметным.
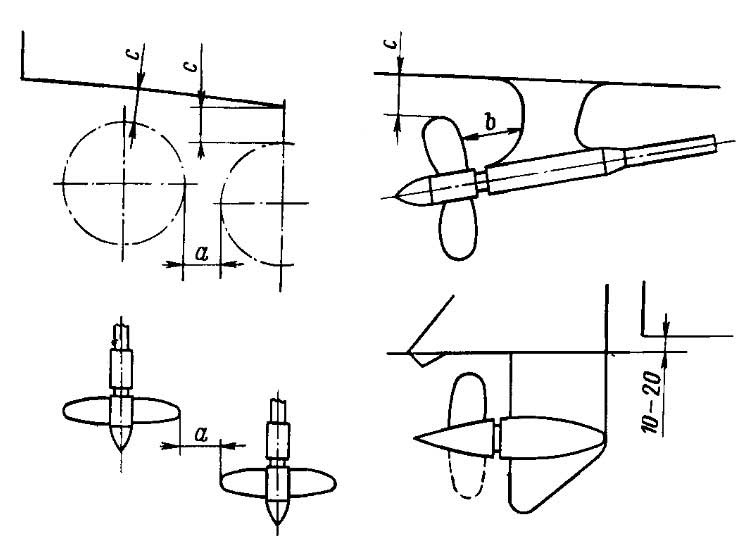
a = (0,14÷0,20) D; b = (0,16÷0,26) D; c = (0,12÷0,24) D
Кроме того, необходимо иметь в виду, что на многих глиссирующих судах ГВ обтекаются неравномерным и, в частности, сильно скошенным потоком. Косое обтекание винта смещает точку приложения суммарного упора всех лопастей на некоторое расстояние от оси винта в сторону его вращения, что усугубляет влияние заноса кормы.
Для поддержания прямого курса судна с ГВ одностороннего вращения приходится постоянно перекладывать рули, что увеличивает сопротивление и снижает скорость судна. Кардинальным средством устранения крена и обеспечения устойчивости хода является установка на судне двигателей и движителей противоположного вращения. В этом случае благодаря симметричности все боковые силы и моменты будут взаимно уравновешиваться. С целью уменьшения опасности засасывания атмосферного воздуха и захвата винтами плавающих в воде предметов направление вращения ГВ целесообразно принимать наружным, т. е. через верх к бортам.
Для повышения пропульсивных качеств и уменьшения вибрации корпуса следует обратить внимание на рациональное расположение ГВ относительно корпуса судна и других выступающих частей. При этом необходимо стремиться к обеспечению возможно более свободного обтекания ГВ. Различные варианты размещения ГВ за корпусом судна и размеры рекомендуемых зазоров представлены на рис. 9. Нижние пределы указанных величин могут быть допущены только для тихоходных малых судов. Для быстроходных катеров и лодок, а также при опасности возникновения вибрации, зазоры следует по возможности увеличивать. При этом необходимо также иметь в виду следующие рекомендации.
- Для уменьшения вредного влияния косого обтекания на работу винта линия гребного вала должна иметь возможно меньший угол наклона.
- Кронштейны гребных валов лучше делать однолапыми. Сечения лап кронштейнов должны иметь хорошообтекаемую форму и входить в поток с нулевым углом атаки. Благодаря этому уменьшаются сопротивление и вихреобразование лап кронштейнов.
- Для увеличения отстояния ГВ от концевого кронштейна целесообразно несколько откидывать лопасти в корму. Экспериментальная проверка показывает, что наклон лопастей в пределах 10-15° практически не отражается на эффективности ГВ.
- Для получения контрпропеллерного эффекта и повышения пропульсивного коэффициента рули следует устанавливать в непосредственной близости за ГВ. Это улучшает и работу самих рулей. Эффективность рулей быстроходных глиссирующих катеров и лодок значительно повышается, если их располагать под антикавитационной плитой или под днищем. Благодаря этому удается существенно уменьшить площадь рулей без ухудшения маневренных качеств судна.
- Перекрытие дисков ГВ в осевом направлении совершенно недопустимо, так как в этом случае возмущенный поток от переднего винта будет создавать большую неравномерность скоростей в диске заднего винта и условия его работы резко ухудшатся.
Применительно к подвесным моторам последняя рекомендация имеет дополнительную особенность, связанную с тем, что при перекладке моторов расстояние между осями ГВ и их дисками начинает уменьшаться. Для компенсации этого уменьшения подвесные моторы надо располагать дальше друг от друга, чем стационарные двигатели. Необходимое расстояние между осями ГВ подвесных моторов в прямом положении может быть найдено по формуле:
- αп.м — максимальный угол перекладки моторов.
Расставлять моторы шире, чем это требуется по формуле 33, не следует, так как ГВ могут оказаться расположенными слишком близко к бортам и появится опасность их оголения при кренах судна на поворотах.
6 Устанавливая подвесные моторы, необходимо следить, чтобы расположенная над ГВ антикавитационная плита всегда находилась ниже продолжения линии днища не менее чем на 10-20 мм.
Рекомендации по подбору и доводке ГВ
Скоростные испытания судна и их анализ являются основным средством контроля методов расчета ходкости и их дальнейшего совершенствования.
При проведении натурных скоростных испытаний на каждом режиме работы двигателей обычно измеряют следующие характеристики:
- частоту вращения двигателей или гребных валов;
- скорость и ходовой дифферент судна;
- расход топлива (для определения мощности дизелей).
При подготовке к испытаниям подводная часть корпуса должна быть приведена в хорошее состояние, очищена и окрашена. При проведении испытаний необходимо тщательно определять водоизмещение судна, используя для этого взвешивание, замеры осадок носом и кормой, а также сравнение элементов расчетной и фактической нагрузок. ГВ должны быть обмерены на специальных приборах. Если на судне имеются подводные крылья, то их установочные углы замеряют при каждом подъеме судна. В результате скоростных испытаний должны быть выбраны ГВ, которые при заданных значениях водоизмещения судна и мощности механической установки имели бы номинальную частоту вращения, обеспечивая при этом достижение наибольшей скорости. ГВ, удовлетворяющие указанным условиям, считаются согласованными с сопротивлением судна и мощностью двигателей. При приведении элементов ГВ в соответствие с мощностью двигателя и сопротивлением корпуса судна необходимо учитывать следующие соображения.
Будет интересно: Типы малых гребных лодок
Внешняя и винтовая характеристики двигателей внутреннего сгорания имеют различные законы изменения мощности в зависимости от частоты вращения и могут пересекаться только в одной точке.
Внешняя характеристика представляет зависимость между мощностью и частотой вращения двигателя при наибольшей подаче топлива. Эта характеристика не зависит от особенностей потребителя мощности.
Зависимость мощности двигателя от частоты его вращения при различной подаче топлива и работе на Влияние гребного винта фиксированного шага (ВФШ) и руля на управляемость суднаГВ фиксированного шага называют винтовой характеристикой. Эта характеристика определяется сопротивлением судна при тех или иных условиях его плавания и элементами ГВ. Для водоизмещающих судов она близка к кубической параболе:
Для глиссирующих катеров и КПК показатель степени параболы часто снижается и достигает значений 2 и менее. Наилучшее согласование ГВ с двигателем достигается при пересечении винтовой и внешней характеристик в точке, соответствующей номинальным или другим заданным значениям мощности и частоты вращения. Однако при часто изменяющихся условиях эксплуатации судна обеспечить постоянную работу двигателя на номинальном режиме не удается. Задачей доводки винта на скоростных испытаниях является выбор таких его элементов и характеристик, которые создавали бы некоторый запас мощности и обеспечивали работу двигателя преимущественно на расчетном режиме, принятом при проектировании ГВ. Обычно этот режим располагаемой мощности двигателя, то он будет близок к 90 % номинальной мощности.
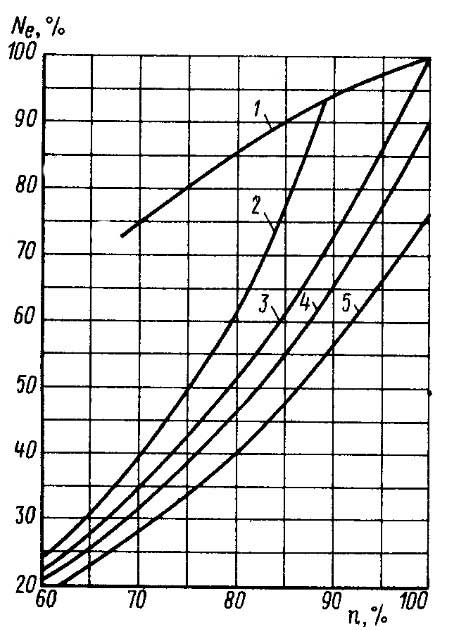
1 – внешняя характеристика двигателя; 2 – винтовая характеристика тяжелого винта; 3 – теоретическая винтовая характеристика Ne = kn3; 4 – рекомендуемая характеристика согласованного гребного винта; 5 – винтовая характеристика легкого винта
Приведение ГВ в соответствие с механической установкой судна, т. е. повышение или понижение фактически расходуемой мощности двигателя до совпадения ее с заданной или располагаемой, может достигаться двумя путями — изменением сопротивления судна и изменением характеристик ГВ. Изменение сопротивления полностью построенных катеров и мотолодок может быть достигнуто изменением их нагрузки и центровки, т. е. увеличением или уменьшением количества пассажиров и перевозимых грузов, а также места их расположения.
Необходимые значения диаметра или шага ГВ могут быть определены проверочным расчетом паспортной диаграммы.
С целью ускорения работ величину ожидаемой корректировки диаметра или шага ГВ в процессе его доводки можно определять по приближенной формуле (с учетом знака):
где:
- H — исходный конструктивный шаг ГВ;
- n0 — требуемая или номинальная частота вращения ГВ или двигателя;
- n1 — соответствующая частота вращения, достигнутая на ходовых испытаниях.
Увеличение или уменьшение шага металлических — бронзовых, латунных и стальных — ГВ малых судов осуществляется соответствующим поворотом каждой лопасти на нужный угол в горячем состоянии. Предварительно для нагнетающей поверхности лопастей изготовляют новые шаговые угольники для контроля изменения шага ГВ.
Облегчение ГВ чаще производят обрезкой концов лопастей, т. е. уменьшением его диаметра. Однако при этом следует считаться с возможным снижением КПД винта вследствие изменения режима его работы и с опасностью возникновения кавитации из-за утолщения концевых сечений лопастей. Кромки лопастей при обрезке аккуратно заваливают. Новый контур лопасти должен плавно сопрягаться со старым.
Относительная простота подъема малых судов и спуска их на воду позволяет для более тщательного выбора диаметра ГВ осуществлять обрезку лопастей в процессе двух, а то и трех приближений. После каждой обрезки кромок лопастей следует обязательно произвести статическую балансировку ГВ. Утяжеление ГВ малых судов путем наварки лопастей не практикуется, так как помимо технологических трудностей это ведет к уменьшению зазоров между винтом и днищем и может вызвать вибрацию.
Предлагается к прочтению: Портативные лодки малого типа
Если по каким-либо причинам диаметр или шаг ГВ невозможно довести до необходимых значений, то может встать вопрос о замене винта. Этот вопрос также возникает при поломке или сильном повреждении ГВ. Для быстрого подбора более или менее равноценных ГВ, позволяющих нормально загрузить двигатель и развить достаточную скорость, можно руководствоваться известной эмпирической рекомендацией о взаимо-заменяемости ГВ в случае близости их суммарных значений диаметра и шага:
Данная рекомендация относится в основном к некавитирующим ГВ малых судов. При наличии кавитации должны быть близкими также дисковые отношения винтов и профилировка лопастных сечений.
В общем случае при практическом применении формул 35 и 36 следует иметь в виду, что во избежание существенного уменьшения КПД винта отклонения величин диаметра и шага в ту или иную сторону не должны превышать ~10 %.
Нашли опечатку? Выделите и нажмите CTRL+Enter





