Характеристики судового дизеля и его динамические свойства определяются силами инерции, т. е. массой деталей двигателя, находящихся в движении, и величиной изменения скорости движения, т. е. ускорения, положительного при увеличении скорости и отрицательного при торможении, а также объемами емкостей, через которые поступает рабочая среда.
В данном материале рассмотрим динамические параметры Анализ конструкций судовых ДВСмеханизмов СДВС, оказывающие влияние на эффективную и безаварийную эксплуатацию дизеля, а также варианты установки механизмов топливоподачи.
Динамические свойства дизеля
Механизмы двигателя, определяющие в основном его динамические свойства, представлены на рис. 1.
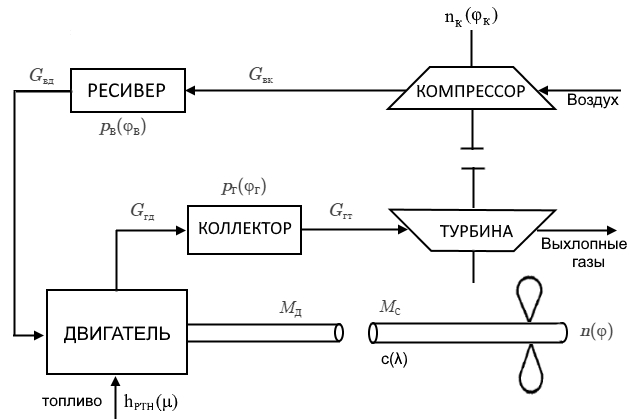
Под наименованием «Двигатель» представлены движущиеся детали двигателя (их масса или приведенный момент инерции): поршни, шатуны, коленчатый вал и прочие детали, кинематически с ним связанные, в том числе гребной вал, гребной винт, а также массы воды, приводимые в движение лопасти гребного винта.
Читайте также: Характеристики двигателей в судовой промышленности
Рабочей средой дизеля являются топливо, воздух, выхлопные газы. Небольшие емкости трубопроводов и механизмов, через которые топливо подается в цилиндры двигателя (ТНВД, трубопроводы высокого давления, форсунки), позволяют пренебречь временными характеристиками Процессы топливоподачи в СДВСканала топливоподачи.
Большие объемы трубопроводов выхлопных газов (коллектор выхлопных газов) и воздуха (воздушный ресивер) в совокупности со связывающим их газотурбонагнетателем (ГТН) приводят к значительным временным запаздываниям в процессе изменения количества подаваемого в цилиндры воздуха и вследствие этого – к существенным нарушениям соответствия «топливо – воздух» на маневровых режимах.
Уравнение динамики двигателя
Уравнение динамики двигателя представлено в виде:
где:
- Мд = Мд(h, pв, n);
- Мс = Мс(n, с);
- Jд – приведенный момент инерции двигателя.
В относительных величинах уравнение динамики двигателя можно представить следующим образом:
где:
- Tд – постоянная времени двигателя;
- n(φ) – абсолютная и относительная частота вращения;
- Z – коэффициент саморегулирования (фактор устойчивости);
- h(μ) – абсолютная и относительная величина топливоподачи;
- pв(φв) – абсолютная и относительная величина давления продувочного воздуха;
- c(μ) – абсолютная и относительная величина внешних воздействий;
- kh, kp, kc – коэффициенты, значения которых определяются конструктивными параметрами механизмов двигателя.
Одноемкостное звено – «Двигатель», описываемый дифференциальным уравнением первого порядка, имеет экспоненциальную динамическую характеристику, т. е. монотонный переходный процесс.
Уравнение коллектора
Уравнение динамики коллектора может быть представлено в следующем виде:
где:
- Jкг – приведенный момент инерции газов в коллекторе;
- Gгд и Gгт – количество газов, поступающее в Устройство и принцип действия топливной аппаратуры дизелей на судахколлектор из цилиндров двигателя, и поступающее на турбину ГТН из коллектора;
- pг(φг) – абсолютная и относительная величина давления газов в коллекторе;
- Tг – постоянная времени коллектора;
- Zг – коэффициент саморегулирования;
- nг(φг) – абсолютная и относительная величина частоты вращения компрессора (ГТН);
- kh и kг – коэффициенты, определяемые конструктивными параметрами механизмов.
Переходный процесс в одноемкостном коллекторе – монотонный, экспоненциальный.
Уравнение ГТН (турбокомпрессора)
Уравнение динамики турбокомпрессора может быть представлено в виде:
где:
- Jк – приведенный момент инерции турбокомпрессора;
- Мт и Мк – момент турбины и компрессора;
- Tк – постоянная времени турбокомпрессора;
- Zк – коэффициент саморегулирования турбокомпрессора.
Переходный процесс турбокомпрессора как одноемкостного звена, описываемого дифференциальным уравнением 1-го порядка, как и предыдущих звеньев, носит монотонный (экспоненциальный) характер.
Уравнение воздушного ресивера
Уравнение динамики воздушного ресивера представлено в виде:
где:
- Jв – приведенный момент инерции воздуха в ресивере;
- Gвк и Gвд – количество воздуха, поступившего из компрессора в ресивер и из ресивера в двигатель;
- Tв – постоянная времени ресивера;
- Zв – коэффициент саморегулирования ресивера;
- kк и kn – коэффициенты, определяемые конструктивными параметрами механизмов.
Таким образом, двигатель, в соответствии с принятой схемой, содержит четыре одноемкостных элемента. Поэтому он представляет собой 4-емкостное звено, описываемое дифференциальным уравнением 4-го порядка.
Переходный процесс в 4-емкостном объекте может быть как монотонным, так и колебательным, в зависимости от значений постоянных времени отдельных одноемкостных звеньев. Несмотря на то, что в данном материале не рассматривается динамика пуска дизеля и на рис. 1 не показаны трубопроводы и механизмы пусковой системы: главный пусковой клапан, воздухораспределитель, пусковые клапаны, канал пуска также может быть представлен одноемкостным звеном.
Регулирование частоты вращения. Ограничение топливоподачи
Главный судовой дизельный двигатель, обладая свойством саморегулирования, длительное время эксплуатировался без использования всережимного регулятора частоты вращения (ВРЧВ). Однако свойство саморегулирования главного судового двигателя не является абсолютным. В области низких частот вращения дизель теряет это свойство. Частота вращения самого малого хода граничит между областью саморегулирования, т. е. областью рабочих режимов главного двигателя от самого малого до полного хода, и областью, в которой это свойство отсутствует, т. е. работа двигателя становится неустойчивой и он может останавливаться самопроизвольно. При этом граница между областями смещается при изменении теплового состояния двигателя и других факторов.
Потеря свойства саморегулирования определяется, в частности, тем, что при малой частоте вращения ухудшается распыл топлива. При малой топливоподаче, соответственно, уменьшается тепловыделение, при этом отвод тепла через стенки втулки при малой скорости хода поршня оказывается значительным. В результате снижения температуры самовоспламенения топлива оно перестанет воспламеняться, и двигатель глохнет.
На рис. 2 рассматривается взаимодействие моментов (Мд и Мс) при скачкообразном возрастании нагрузки (при вхождении судна в лед) и при работе двигателя в зоне низкой частоты вращения.
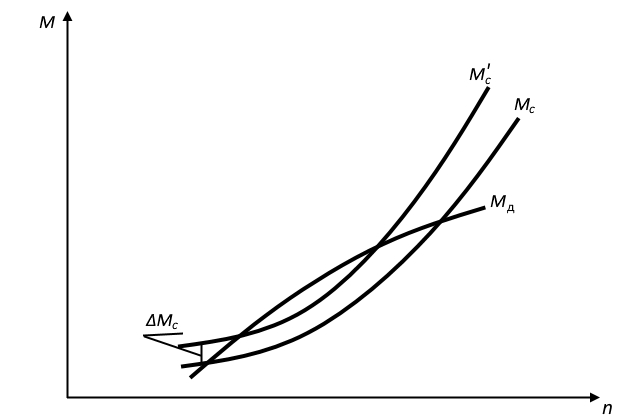
Возникший при этом избыточный момент сопротивления начинает снижать частоту вращения двигателя. Однако разность Мд и Мс в этом случае не уменьшается, а продолжает возрастать. В результате происходит самопроизвольная остановка двигателя.
При неавтоматизированном управлении механик при работе на режиме самого малого хода, в случае снижения частоты вращения (например, при перекладке руля) увеличивает топливоподачу, предотвращая тем самым самопроизвольную остановку двигателя.
Элементы автоматических систем суднаПри автоматизированном управлении главным двигателем, т. е. применении системы ДАУ, для обеспечения устойчивой работы дизеля был установлен регулятор частоты вращения. Так как время работы двигателя на неустойчивом режиме самого малого хода – незначительно, главный двигатель был оборудован всережимным регулятором частоты вращения, обеспечивающим поддержание заданной частоты вращения во всем диапазоне его рабочих режимов.
Будет интересно: Топливная система судовой дизельной установки и процесс топливообработки
Однако применение всережимного регулятора наряду с обеспечением устойчивости ухудшило качество работы двигателя на маневровых режимах и в тяжелых условиях плавания (в связи с нарушением соответствия топлива с воздухом). Поэтому в ВРЧВ, устанавливаемом на главный двигатель, был встроен механизм ограничения топливоподачи (защиты от «перегрузки») на маневровых режимах и в тяжелых условиях плавания.
Назначением механизма защиты от «перегрузки» является обеспечение соответствия между частотой вращения и топливоподачей в эксплуатационных ситуациях, вызывающих нарушение их нормального соотношения, а именно при пуске двигателя, разгоне судна, перекладке руля, встречном ветре, плавании на мелководье и во льдах, на волнении и т. д. Механизм устанавливает предел максимальной топливоподачи, допустимой для каждой конкретной частоты вращения. При изменении частоты вращения механизм, соответственно, изменяет этот предел (рис. 3).
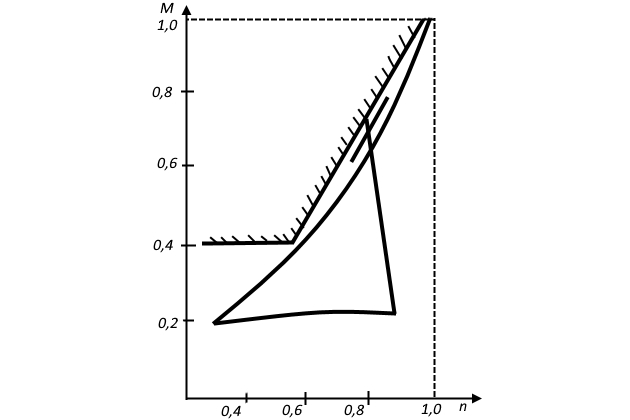
Это свойство даст возможность использовать данный механизм для выполнения важной функции – установки пусковой топливоподачи. Механизм функционирует в двух вариантах, устанавливая предел топливоподачи в зависимости либо от заданной на входе ВРЧВ частоты вращения, либо от фактической частоты вращения вала двигателя.





