Маневренность судна – это способность малотоннажного или крупнотоннажного плавательных средств изменять свою траекторию движения на высокой скорости.
Расчет поворотливости и крена судна на циркуляции
Расчет поворотливости судна — определение зависимостей безразмерной угловой скорости, диаметра установившейся циркуляции и угла дрейфа от угла перекладки рулевого органа — основывается на решении системы алгебраических уравнений, представляющих собой условия равновесия гидродинамических сил и моментов, действующих на корпус судна и органы управления.
Водоизмещающий режим
Угол дрейфа судна на установившейся циркуляции и безразмерную угловую скорость определяют по формулам:
Величины, входящие в эти формулы, определяются соответственно для каждого типа органов управления.
Руль:
где:
- nR – число рулей;
, определяют по формулам 24, 30, и 33 в статье Управляемость малого судна“Влияние ГВ и корпуса на ГДX руля”, соответственно.
Подвесной мотор (поворотная колонка):
где:
- nв — число подвесных моторов (поворотных колонок);
и
определяют по формулам 42 и 43 в статье Управляемость малого судна“Подвесной мотор (поворотная колонка)” соответственно.
Водометный движитель:
где:
определяют по данным табл. Управляемость малого судна“Производная подъемная сила РРУ”;
- коэффициент qs по рисункам Водометные движители малотоннажных судов, устройство и чертежи“График для определения коэффициента засасывания водометного комплекса”, Водометные движители малотоннажных судов, устройство и чертежи“График для определения относительной скорости протекания воды через диск водометного движителя” либо по данным ходкости.
Для всех типов органов управления параметры q и s рассчитывают по формулам:
а безразмерные ГДХ корпуса
вычисляют по формулам 7—11 в статье Определение корпусных характеристик в момент взаимодействия судна с водной поверхностью“ГДХ корпуса судна, движущегося в водоизмещающем режиме”.
Значение безразмерного радиуса (диаметра) установившейся циркуляции определяют по формуле:
На циркуляции происходит падение скорости судна по сравнению с прямолинейным движением. При
связь между скоростью на циркуляции ν0 и скоростью на прямом курсе ν определяется формулой:
Приведенная формула справедлива для расчета скорости судна на циркуляции в любом режиме движения. Судно, движущееся в водоизмещающем режиме на установившейся циркуляции, имеет наружный крен по отношению круга циркуляции, определяемый по формуле:
где:
- Y0 — боковая сила органа управления, определяемая по формулам 23, 41 и 45 в статье Управляемость малого судна“Устойчивость судна на курсе и его управляемость”;
значения β и
, входящие в указанные формулы, находят из выражений (Формулы 1, 2);
- значение ν0, по которому рассчитывается Y, определяют по формуле 24;
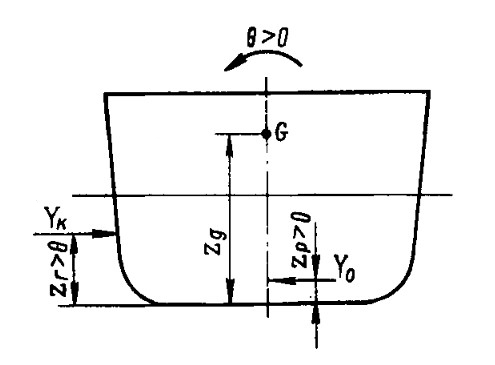
- zг — ордината точки приложения боковой силы на корпусе (рис. 1);
- zp — ордината точки приложения боковой силы органа управления, отсчитываемая от основной плоскости (см. рис. 1) и соответствующая:
- для руля — центру тяжести площади боковой проекции;
- для подвесного мотора (поворотной колонки) — оси ГВ;
- для водометного движителя — центру тяжести площади боковой проекции РРУ.
В том случае, если точка приложения боковой силы органа управления находится ниже основной плоскости, zp < 0.
У остроскулых (глиссирующих) судов при 0,3 ≤ FrL ≤0 ,6 угол крена на циркуляции с увеличением скорости уменьшается, изменяясь от наружного по отношению круга циркуляции к внутреннему. В этом случае расчет угла крена по формуле 25 производить нельзя.
В отдельных случаях у остроскулых судов наблюдается увеличение наружного крена с ростом Fr (особенно это характерно при удлинении корпуса L/B > 5). Тогда в диапазоне FrL < 0,6 определение угла крена можно произвести по формуле 25, если известно, например по данным судна-прототипа, что в этом режиме имеет место наружный крен по отношению круга циркуляции.
Переходной режим
Аналитических зависимостей, связывающих ГДХ корпуса с геометрическими характеристиками и кинематическими параметрами при 0,6 < FrL < 1, не существует; методика расчета поворотливости судов в указанном диапазоне изменения FrL основывается на использовании специального атласа характеристик управляемости, по материалам которого составляется система из шести-восьми уравнений, соответствующая линейным приближениям между данными атласа и геометрическими характеристиками судна. Естественно, изложение этого метода выходит за рамки настоящего издания. Данные по ГДХ корпусов, полученные А. Ш. Афремовым, Н. А. Смолиной, П. К. Соболевым, позволяют качественно оценить влияние различных параметров корпуса на характеристики управляемости.
Глиссирующий режим
При FrL > 1 безразмерную угловую скорость и угол крена на циркуляции определяют по формулам:
— безразмерное отстояние точки приложения боковой силы органа управления от центра масс судна (о положении точки приложения боковой силы для различных органов управления см. рис. Определение корпусных характеристик в момент взаимодействия судна с водной поверхностью“К описанию управляемости глиссирующих судов”);
– безразмерное отстояние транца от центра масс судна;
- — число Фруда по ширине судна на транце;
- qν — коэффициент, учитывающий влияние угла килеватости (см. рис. Определение корпусных характеристик в момент взаимодействия судна с водной поверхностью“Зависимость коэффициентов nv, mv, qv от угла килеватости”);
- — приведенная производная коэффициента боковой силы органа управления по углу перекладки, определяемая по формулам:
для руля:
для подвесного мотора (поворотная колонка):
для водометного движителя:
где:
νср,
определяются соответственно по формулам 24, 33, 42 в статье Управляемость малого судна“Влияние ГВ и корпуса на ГДX руля”;
по табл. Управляемость малого судна“Производная подъемная сила РРУ” коэффициент qs — по рисункам “График для определения коэффициента засасывания водометного комплекса tв”, “График для определения относительной скорости протекания воды через диск водометного движителя”.
Знак “-” в формуле 27 указывает на то, что судно на циркуляции в режиме глиссирования имеет внутренний крен по отношению круга циркуляции. Связь между безразмерными угловыми скоростями
и
определяется формулой:
Расчет угла крена можно произвести также по следующим формулам. Формула Г. А. Фирсова для определения максимального угла крена на циркуляции при движении судна в водоизмещающем режиме:
где:
- ν — скорость на прямом курсе.
Угол крена на циркуляции при изменении Определение поперечной метацентрической высоты судна путем выполнения опыта кренованияметацентрической высоты, положения центра тяжести и скорости судна, двигающегося в водоизмещающем режиме, определяется по формуле:
где:
- hи, zgи, νи — исходные параметры судна;
- Θи — угол крена при значениях hи, zgи, νи, полученный расчетным или экспериментальным путем;
- zg, h, ν — измененные параметры судна, для которых определяется угол крена Θ.
Значения ν и νи в формуле 33 соответствуют прямому курсу. Расчет по формуле 33 допустим, если изменение метацентрической высоты находится в пределах 50 %, а изменение скорости в пределах 20 % по сравнению с исходными.
Формула А. Ш. Афремова для расчета угла крена в переходном и глиссирующем режимах движения судна при условии предварительного замера крена при двух значениях метацентрической высоты:
где:
- Θ1 — угол крена при h = h1;
- Θ2 — угол крена при h = h2.
Определение углов крена Θ1, Θ2 и расчет по формуле 34 ведется для одного и того же значения ω.
Угол крена при движении судна на прямом курсе, вызванный гидродинамическим моментом ГВ (ГВ — в случае нескольких движителей одного вращения), определяется по формуле:
где:
- К2 — коэффициент момента ГВ;
- n — число оборотов ГВ (1/с) ;
Знак угла Θp противоположен направлению вращения движителя.
Оценку угла крена Θp необходимо производить для судов, движущихся в переходном или глиссирующем режимах (при движении в водоизмещающем режиме величина Θp близка к 0).
Устойчивость прямолинейного движения судна
Результаты расчета, выполненного в соответствии с данными в начале статьи, принято представлять в виде зависимостей:
Зависимости
и
(рис. 2), получившие название диаграммы управляемости, дают информацию как о поворотливости судна, так и об устойчивости прямолинейного движения.
Различают теоретическую (автоматическую) и эксплуатационную устойчивость движения. В первом случае устойчивость определяется способностью судна восстановить свое прямолинейное движение после прекращения действия возмущения автоматически, без перекладки рулевого органа.
Поддержание прямолинейного движения с помощью перекладок рулевого органа характеризует эксплуатационную устойчивость.
Диаграмма управляемости вида 1 (см. рис. 2) свидетельствует о наличии автоматической устойчивости прямолинейного движения.
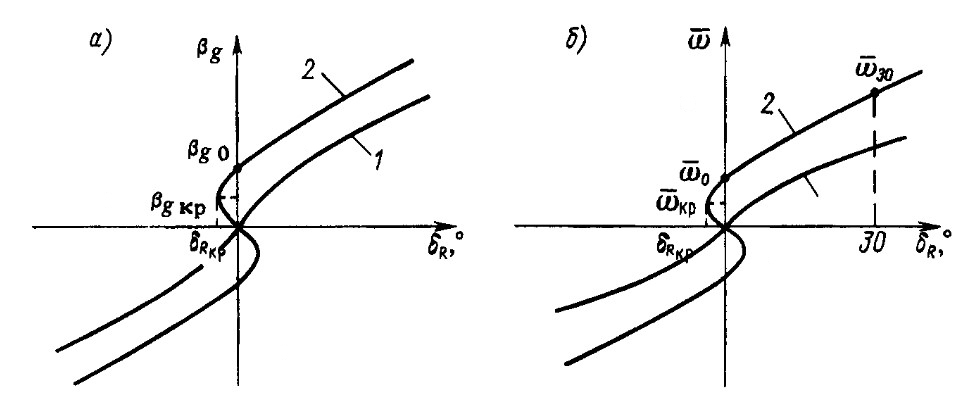
а – в осях βg = f (δR); б – в осях ω = f (δR).
1 — устойчивое судно; 2 — неустойчивое судно
Диаграмма управляемости вида 2 показывает, что при непереложенном органе управления судно входит в циркуляцию с относительной кривизной ω0 и углом дрейфа βg 0, вывести из которой судно можно, переложив, рулевой орган на борт, противоположный направлению циркуляции, на угол, превышающий величину δRкр. Последний получил название критического угла перекладки.
В переходном и глиссирующих режимах суда обладают устойчивостью прямолинейного движения. Отсутствие автоматической устойчивости движения проявляется в водоизмещающем режиме и выражается условием q < 0. В этом случае при δR = 0:
Критический угол перекладки руля, а также значения безразмерной угловой скорости
и угла дрейфа βgкр, соответствующие δRкр, определяют по формулам:
| Таблица 1. Изменение параметров управляемости при увеличении значений характеристик водоизмещающего судна | |||
|---|---|---|---|
| Характеристика судна | Улучшение | Уменьшение крена на циркуляции | |
| устойчивости | поворотливости | ||
| Отношение L/B | Да | Нет | Да |
| Коэффициент общей полноты δR | Нет | Да | Нет |
| Площадь кормового дейдвуда | Да | Нет | Да |
| Полнота кормы | Нет | Да | Нет |
| Дифферент на корму | Да | Нет | Да |
| Эффективность органов управления (за счет увеличения площади руля, удлинения, вызванных скоростей гребного винта, при условии отсутствия кавитации и т. д.) | Да | Да | Нет (как правило, влияние противоречиво) |
| Отстояние руля от корпуса при сохранении его геометрии (опускание руля) | Да | Нет | Да |
| (незначительно) | |||
| Скорость | Да | Нет | Нет |
| Метацентрическая высота (понижение центра тяжести) | Нет | Нет | Да |
| (незначительно) | |||
Отсутствие автоматической устойчивости прямолинейного движения приводит к ухудшению эксплуатационной устойчивости, поскольку при этом возрастают амплитуда и частота перекладки рулевого органа. В соответствии с рекомендацией Е. Б. Юдина допустимую степень неустойчивости, обеспечивающую приемлемую эксплуатационную устойчивость, определяют из условия:
где:
- — безразмерная угловая скорость при δ = 30°.
При выполнении расчетов управляемости в случае q < 0 необходимо, кроме определения величин ω0, βg 0, δRкр, ωкр (βg кр) найти по формуле 23 угол крена при δR = 0.
| Таблица 2. Изменение параметров управляемости при увеличении значений характеристик судна, движущегося в переходном режиме | ||
|---|---|---|
| Характеристика судна | Улучшение поворотливости | Уменьшение крена на циркуляции |
| Отношение L/B | Нет (для круглоскулых судов) | Да (наружный крен) |
| Да (для остроскулых судов) | Нет (наружный крен) | |
| Да (внутренний крен) | ||
| Угол килеватости | Да | Нет (наружный крен) |
| (как правило, влияние противоречиво) | Да (внутренний крен) | |
| Центровка (смещение в нос) xт | Да | Нет (наружный крен) |
| Да (внутренний крен) | ||
| Эффективность органов управления | Да | Нет (наружный крен, как правило, влияние противоречиво) |
| Да (внутренний крен) | ||
| Отстояние руля от корпуса при сохранении его геометрии (опускание руля) | Нет (незначительно) | Да (внутренний крен) |
| Нет (внутренний крен) | ||
| Скорость* | Нет (для круглоскулых судов) | Нет (наружный крен) |
| Нет (для остроскулых судов) | Нет (наружный и внутренний крен, как правило, влияние противоречиво) | |
| Метацентрическая высота (понижение центра тяжести) | Нет (незначительно) | Да (наружный крен) |
| Нет (внутренний крен) | ||
Примечание:
- *Для судов, движущихся в переходном режиме, рост скорости может привести к уменьшению крена на циркуляции. Это наблюдается в том случае, если исходный крен был наружным, и увеличение скорости переводит его во внутренний.
| Таблица 3. Изменение параметров управляемости в зависимости от характеристик глиссирующего судна | ||
|---|---|---|
| Характеристика судна | Улучшение поворотливости | Уменьшение крена на циркуляции |
| Отношение L/B | Да | Нет |
| Угол килеватости | Нет | Да |
| (как правило, влияние противоречиво) | ||
| Центровка (смещение в нос) xт | Нет | Да |
| Эффективность органов управления | Да | Нет |
| Скорость | Нет | Нет |
| Метацентрическая высота (понижение центра тяжести) | Да | Нет |
О зависимости параметров управляемости от изменения некоторых основных характеристик судна дают представление табл. 1—3.





