Водометные движители представляют собой насос, который принимает и выталкивает воду, за счет чего происходит силовая тяга, что и приводит малотоннажное судно к движению.
Основные понятия и определения
Водометным движителем (ВД) или водометом называют движительный комплекс, состоящий из водопроточных труб и рабочих колес, которые засасывают воду через приемное отверстие в днище и выбрасывают ее с повышенной скоростью через специальное выходное сопло в кормовой части судна. Реакция отбрасываемой струи движет судно в противоположную сторону. ВД отличается от всех других типов движителей тем, что он полностью расположен внутри корпуса судна.
На водометный движитель существуют две точки зрения. Согласно одной из них ВД представляет собой центробежный или осевой пропеллерный насос. В этом случае расчет и проектирование ВД производят по насосным справочникам и диаграммам. Согласно другой точке зрения ВД рассматривается как ГВ, работающий в трубе.
Проектирование такого ГВ производится с помощью теории эквивалентного движителя по расчетным диаграммам изолированных ГВ. Этот метод проектирования ВД, вследствие своей простоты и надежности, является более предпочтительным для малых судов. Достоверность этого метода многократно подтверждена на натурных ходовых испытаниях катеров различного водоизмещения и назначения.
Пропульсивный коэффициент ВД на малых и средних скоростях не превышает значений η = 0,35÷0,45, что является существенным недостатком. Для повышения эффективности ВД и уменьшения потерь на закручивание струи за движителем в трубе обычно устанавливается спрямляющий аппарат — контрпропеллер.
Необходимо отметить следующие достоинства ВД:
- отсутствие выступающих частей вне корпуса судна, благодаря чему значительно уменьшается габаритная осадка судна и повышается живучесть движительного комплекса (для уменьшения опасности засасывания в трубу находящихся в воде предметов приемное отверстие обычно защищается решеткой из хорошо обтекаемых профилей);
- более широкий, чем у открытых ГВ, диапазон бескавитационных режимов работы вследствие обеспечения большей равномерности осевого обтекания винта и возможности осуществления конструктивного поджатия, замедляющего скорость потока в трубе;
- возможность изменения характеристик и направления отходящего потока путем установки поворотных насадок, заслонок и дефлекторов, а также воздушных клапанов.
Благодаря этому обеспечиваются высокие маневренные качества судна на переднем и заднем ходу, а также его реверсирование при отсутствии реверсивной муфты. Остановка судна — режим „стоп” — при этом достигается подачей атмосферного воздуха в водометную трубу перед ГВ.
Общий вид ВД схематически представлен на рис. 1. Элементы трубы ВД выбирают из условия обеспечения наиболее высоких гидромеханических качеств. С целью уменьшения потерь на подъем воды применяют полуподводный выброс струи.
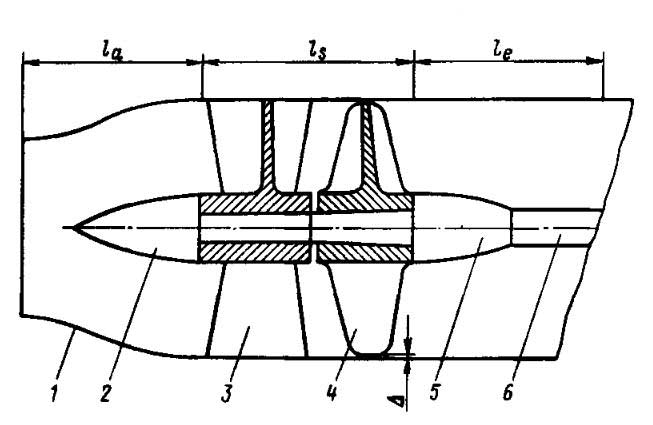
Для обеспечения захвата воды лопастями ГВ в момент начала движения ось гребного вала при самой малой осадке судна Т не должна быть выше уровня свободной поверхности воды. Основные элементы водометной трубы обычно принимают в следующих пределах:
- общая длина прямого участка водометной трубы:
- входная часть трубы — от всасывающего отверстия до ГВ:
- рабочая часть трубы для размещения ГВ и контрпропеллера:
- выходная часть трубы — от контрпропеллера до выходного среза:
| Таблица 1. Расчет ординат продольного сечения водозаборной части водометной трубы | |||
|---|---|---|---|
| 0 | 0 | ||
| 0,1 | 0,04 | ||
| 0,2 | 0,14 | ||
| 0,3 | 0,27 | ||
| 0,4 | 0,42 | ||
| 0,5 | 0,57 | ||
| 0,6 | 0,72 | ||
| 0,7 | 0,84 | ||
| 0,8 | 0,93 | ||
| 0,9 | 0,98 | ||
| 1,0 | 1,00 | ||
Типичное продольное сечение водозаборной части трубы ВД для водоизмещающих и глиссирующих малых судов представлено на рис. 2. Ординаты этого сечения, отнесенные к диаметру цилиндрической части трубы Dт, приведены в табл. 1.
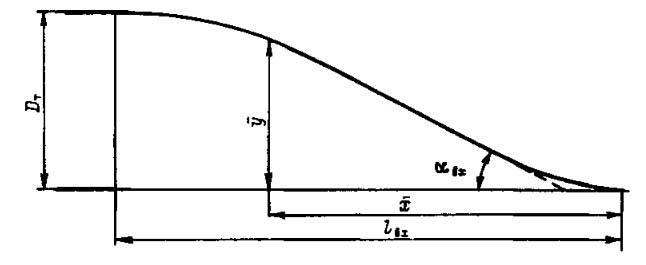
При определении натурных ординат данного водозаборника, его длины и положения по высоте применительно к проектируемому судну необходимо стремиться к тому, чтобы угол подъема воды на входе не превышал значений:
Водометную трубу малого судна можно формировать из стеклопластика, а также сваривать из легкого сплава или стали. При этом для уменьшения сопротивления проточная часть трубы должна быть гладкой. Конструкция ВД должна предусматривать удобство монтажа и демонтажа элементов движителя, а также свободный доступ для осмотра ГВ и спрямляющего аппарата.
Читайте также: Особенности гидродинамики глиссирующих катамаранов
Водометно-движительный комплекс имеет следующие основные характеристики, определяющие его эффективность на различных режимах работы:
- площадь рабочего сечения трубы водомета
где:
- Dт – диаметр трубы водомета;
- D – диаметр ГВ водомета (зазор между кромками лопастей ГВ и трубой △ на малых судах практически не превышает 1-2 мм, им обычно пренебрегают);
- коэффициент поджатия βa, представляющий собой отношение площади выходного среза сопла Aa к площади рабочего сечения:
- поступательная скорость ВД при работе за корпусом судна, движущегося со скоростью ν,
где:
- w — коэффициент попутного потока;
- средняя скорость протекания жидкости через диск ГВ:
где:
- коэффициент qs характеризует соотношение между скоростью судна и средней скоростью потока в диске ГВ;
- коэффициент засасывания ВД, учитывающий влияние корпуса судна и трубы водомета на работу комплекса:
где:
- Р — упор ГВ водомета;
- Рe — полезная тяга комплекса;
коэффициент нагрузки ГВ водомета по упору:
коэффициент нагрузки водометного комплекса по полезной тяге:
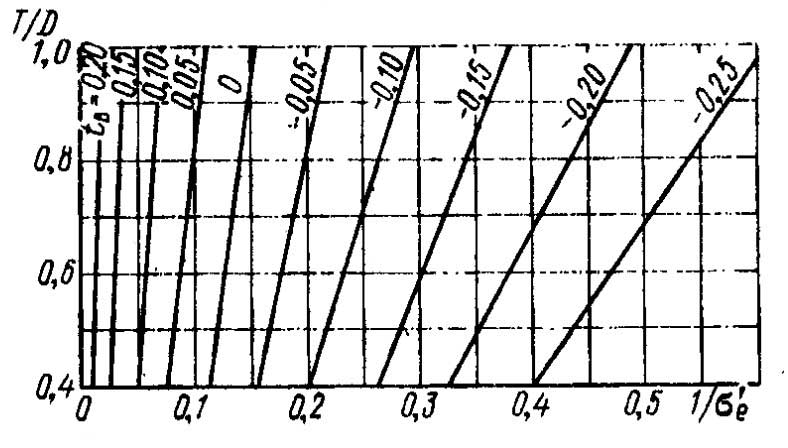
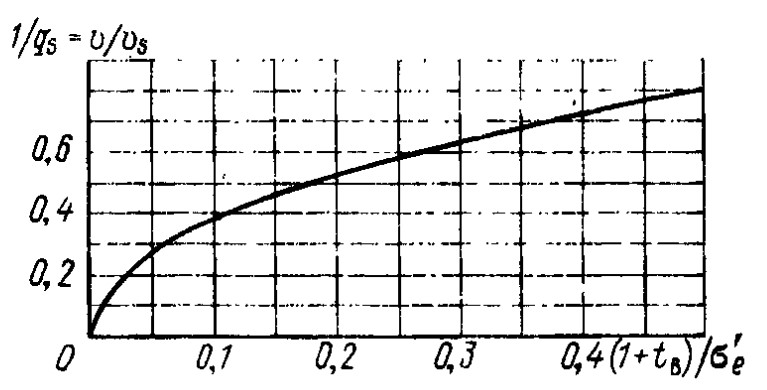
отношение расчетной скорости поступательного перемещения ГВ водомета к скорости судна νp, при котором обеспечивается условие эквивалентности работы ГВ в свободной воде и в водометной трубе,
Значения коэффициентов:
и
находят по графикам, представленным на рис. 3 и 4.
Определение наибольшей скорости судна и основных элементов гребных винтов водомета
Проектирование ГВ водомета производится на основе тех же исходных данных, что и проектирование открытого ГВ.
Число лопастей принимают обычно z = 3 или z = 4. Дисковое отношение, найденное по рис. Гребные винты малотоннажных судов“Зависимость дискового отношения ГВ от ожидаемых значений его диаметра и упора” или по формуле Гребные винты малотоннажных судов“Ориентировочная величина дискового отношения”, не должно превышать значений Θ = 1,0÷1,2.
Дальнейший расчет по определению наибольшей скорости малого водоизмещающего судна и основных элементов ГВ водомета выполняют по приводимой ниже схеме. Расчет производится по диаграмме K1—λр для изолированных ГВ в свободной воде, имеющей выбранное дисковое отношение. При этом следует только иметь в виду, что при работе ГВ в водометной трубе уменьшаются концевые потери. Соответствующую поправку, учитывающую уменьшение концевых потерь винта, находят по рис. 5 и с ее помощью определяют необходимое значение коэффициента упора ГВ водомета (пп: 12 и 13):
Элементы ГВ и наибольшая скорость судна, как и ранее, соответствует точке, в которой необходимая мощность двигателя будет равна располагаемой. Эта точка находится по графической зависимости Ne = f(νк), построенной по результатам расчета, произведенного для нескольких скоростей судна vк, близких к ожидаемому ее значению. Для найденной точки целесообразно произвести контрольный расчет. Если диаметр ГВ водомета, полученный в п. 4 схемы, окажется больше допустимого по конструктивным соображениям, то расчет по приведенной схеме повторяется для заданного значения диаметра ГВ.
Данная схема расчета в основном соответствует рекомендациям с небольшими уточнениями в части определения необходимой мощности двигателя Ne, КПД ηр и шага Н ГВ. Практика показывает, что рекомендация об уменьшении шага ГВ водомета на 6% не подтверждается результатами натурных ходовых испытаний малых судов, и поэтому она исключена из схемы. При этом следует иметь в виду, что приведенная схема расчета не предусматривает поджатия отходящей струи. Решение о необходимости поджатия струи для обеспечения нормальной загрузки двигателей и получения расчетной скорости судна может быть принято по результатам доводки ВД на ходовых испытаниях Малого судна.
Расчет кривых действия гребных винтов водомета и паспортной диаграммы
Расчет кривых действия ГВ водомета производится с помощью выбранных диаграмм K1—λр и рис. 5, позволяющего учесть уменьшение концевых потерь ГВ при его работе в водометной трубе.
Вначале находят характеристики ГВ без учета влияния корпуса судна:
Кривые действия водометного комплекса с учетом влияния корпуса строят в виде зависимостей Ke = f(λ), K2 = f(λ) и ηp = f(λ). Далее для нескольких значений поступи λ и необходимого диапазона частот вращения двигателя производят расчет паспортной диаграммы по следующим формулам:
- скорость, км/ч,
- тяга ВД, кН,
- мощность двигателя, кВт,
Построение и анализ паспортной диаграммы судна с ВД производят обычным образом в соответствии со статьей Гидродинамические характеристики гребных винтов“Характеристики гребных винтов – расчет гидродинамики”.
Конструктивные элементы ГВ водомета — спрямленный контур лопасти, прочный профиль и другие характеристики — определяют в соответствии со статьей Гидродинамические характеристики гребных винтов“Спрямленный контур и прочный профиль лопасти”.
Будет интересно: Суда с механическим двигателем
Контрпропеллер (КП), или спрямляющий аппарат (СА), позволяет использовать для получения дополнительной тяги часть энергии, затраченной ГВ на закручивание струи. КП устанавливается непосредственно за ГВ водомета (рис. 6), и его целесообразно использовать в качестве кормового кронштейна, что упрощает и yдешевляет конструкцию и способствует повышению пропульсивного коэффициента ВД.
Количество лопастей СА:
Ширина спрямленного сечения лопасти КП, постоянная вдоль радиуса, принимается равной примерно половине наибольшей ширины сечения лопасти ГВ bкп ≈ 0,5bm.
Определение элементов КП производят по окончании расчета ходкости для ряда относительных радиусов
0,4; 0,6; 0,8 и 1,0 в следующем порядке.
1 Определяют окружную вызванную скорость:
Радиусы ступиц rс ГВ и СА принимают одинаковыми. Угловую скорость вычисляют для максимальной частоты вращения ГВ ω = 2πn.
2 Находят циркуляцию скорости вокруг лопасти КП:
3 Вычисляют скорость vкп и угол βкп натекания воды на лопасть КП:
4 Для обеспечения безударности входа лопасти КП ее угол установки должен быть
5 Определяют относительный шаг решетки КП:
и по рис. 7 находят коэффициент влияния решетки:
6 Вычисляют угол нулевой подъемной силы данного сечения лопасти КП:
7 Определяют стрелку прогиба и радиус дужки сечения лопасти КП:
8 Выбирают толщину сечения лопасти КП екп, мм по приближенной формуле:
9 Для наименьшего расчетного радиуса КП производят проверку отсутствия кавитации по формуле:
где:
- — ширина сечения КП, минимально допустимая из условия отсутствия кавитации.
Если принятая ширина bкп не удовлетворяет данному условию, то расчет элементов КП повторяют для ширины лопасти:
| Таблица 2. Расчет продольного профиля выходного сопла | ||||
|---|---|---|---|---|
| 0 | 1,00 | |||
| 0,1 | 0,95 | |||
| 0,2 | 0,87 | |||
| 0,3 | 0,74 | |||
| 0,4 | 0,58 | |||
| 0,5 | 0,42 | |||
| 0,6 | 0,28 | |||
| 0,7 | 0,16 | |||
| 0,8 | 0,06 | |||
| 0,9 | 0,02 | |||
| 1,0 | 0 | |||
Определение формы выходного сопла
Профиль выходного сопла, формирующего струю ВД, должен обеспечивать плавный безотрывный поток жидкости при заданной площади концевого сечения и минимальных гидравлических потерях. Радиус концевого сечения сопла rк.с определяют исходя из принятого коэффициента поджатия βa. При известных размерах длины сопла lв.с и входного радиуса Rт = 0,5Dт форма образующей выходного сопла может быть получена по формуле:
где:
- r — текущее значение радиуса сопла на расстоянии x от входного сечения (рис. 8);
- — относительные ординаты продольного сечения выходного сопла, определяемые по табл. 2.
Следует иметь в виду, что иногда для уменьшения длины ВД контрпропеллер совмещают с выходным соплом. В этом случае площади живого сечения выходного сопла должны быть увеличены на величину площади поперечного сечения ступицы КП и обтекателя.

Кроме того, в некоторых случаях вместо наружного поджатия струи применяют внутреннее путем помещения в сопло расширяющегося центрального тела, являющегося продолжением ступицы КП (рис. 9). Это также позволяет несколько сократить длину выходного сопла.

Поскольку окончательная величина коэффициента поджатия сопла обычно устанавливается на ходовых испытаниях, то для облегчения доводки ВД целесообразно предусмотреть возможность изменения площади выходного отверстия сопла. Это можно достичь применением различных внутренних или наружных фигурных вставок, допускающих дополнительную расточку для выбора необходимого коэффициента поджатия, или изготовлением нескольких вариантов выходного сопла.





