Винт регулируемого шага (ВРШ) – это гребной винт, у которого регулируется угол разворота лопастей. Лопасти такого винта разворачиваются специальным механизмом в любое положение в диапазоне «полный вперед – стоп – полный назад», т. е. в зависимости от степени разворота лопастей, не изменяя работы главного двигателя, судну можно придать или движение вперед, или остановиться на месте, или создать движение назад.
Внедрение ВРШ на судах позволяет улучшить маневренные качества судов. К ним в первую очередь относится уменьшение тормозного пути (за счет быстрого перевода лопастей винта на режим работы заднего хода) и периода торможения.
Способы управления
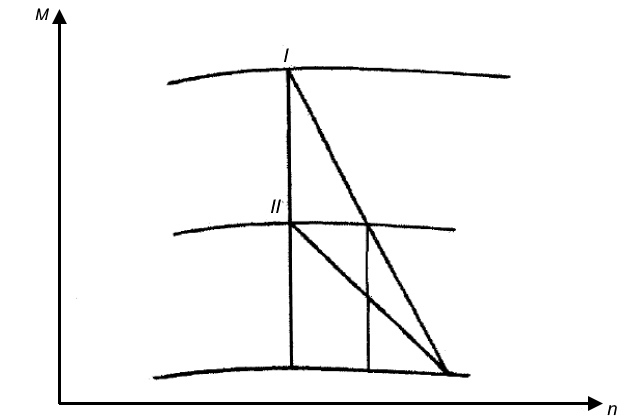
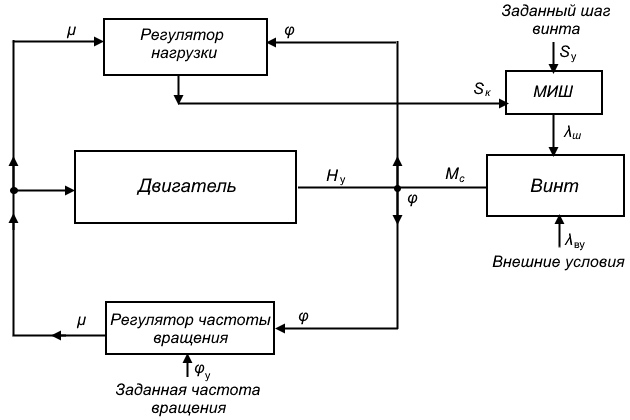
В установках с ВРШ предусматриваются, как правило, два способа управления (рис. 1): комбинаторный режим и режим управления при постоянной (номинальной) частоте вращения.
При комбинаторном режиме управления изменение ходового режима судна осуществляется одновременным изменением шага винта и Главный СДВС как объект управления и регулирования частоты вращениячастоты вращения двигателя. При управлении в режиме постоянной частоты вращения скорость судна задается только шагом винта.
Каждый из способов управления имеет свои достоинства и недостатки. При управлении в режиме постоянной частоты вращения возможно применение валогенератора, но при этом нельзя обеспечить оптимизацию работы установки при работе на различных режимах. При комбинаторном управлении создается противоположная ситуация: возможна оптимизация работы установки, но валогенератор должен быть отключен.
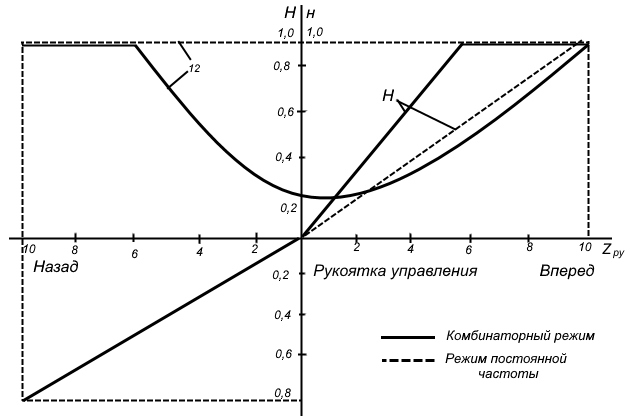
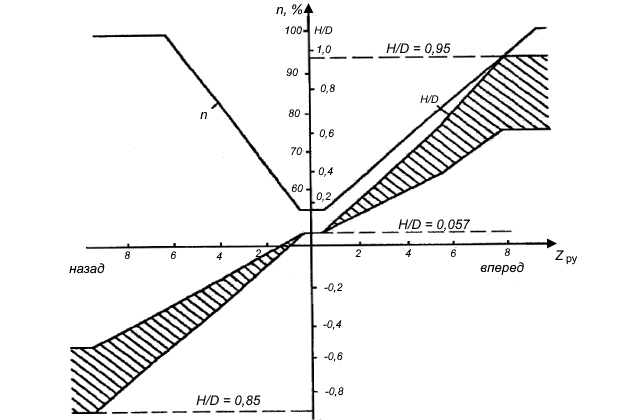
Применение ВРШ существенно расширяет по сравнению с ВФШ область рабочих режимов главного двигателя (рис. 2).
Диапазон возможного смещения винтовых характеристик при изменении шага винта значительно превышает диапазон их смещения, вызываемого изменением внешних условий, а также изменением загрузки судна, Ремонт корпуса суднасостояния корпуса и пропульсивной установки. Поэтому изменение режимов в нежелательном направлении, вызванные этими факторами, как правило, могут быть скомпенсированы изменением шага и частоты вращения винта.
Возможность задания требуемого режима с помощью двух независимых параметров: шага и частоты вращения винта, существенно расширяет возможности пропульсивной установки, так как изменением этих параметров могут быть обеспечены работа двигателя по любой винтовой, регулярной и ограничительной характеристике и сохранение оптимального режима при изменении внешних условий.
Будет интересно: Дистанционное автоматизированное управление главным двигателем судна
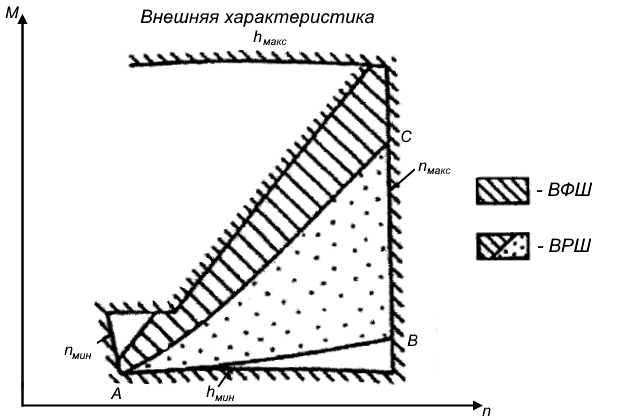
Таким образом, ВРШ позволяет эффективно решать задачи обеспечения экономичности работы СЭУ. Экономичность установки в основном определяется КПД винта. При постоянной скорости судна по мере увеличения шага винта и уменьшения частоты вращения повышается КПД пропульсивной установки, достигая наибольшего значения при конструктивном шаге вблизи ограничительной характеристики. Таким образом, наиболее экономичные и предельно допустимые режимы, как правило, весьма близки друг к другу. Это свойство облегчает поиск оптимальных режимов, но даже небольшое отклонение в сторону утяжеления условий плавания выводит установку на границу предельно допустимых режимов (рис. 3).
Следует отметить, что КПД винта и пропульсивный КПД возрастают при увеличении скорости судна, а также, как отмечено выше, при постоянной скорости судна, увеличении шага и одновременном уменьшении частоты вращения винта.
Регулирование нагрузки
Условия и режим работы главного двигателя в установках с ВРШ и ВФШ существенно различаются организацией защиты двигателя от перегрузки. В условиях с ВРШ эта задача решается с помощью регулятора нагрузки (РН). При этом РН работает совместно с регулятором частоты вращения (РЧВ). Схема их подключения к двигателю и ВРШ представлена на рис. 4.
Основное различие в работе механизмов защиты от перегрузки заключается в следующем:
- в установках с ВФШ ограничивается подача топлива (ограничение осуществляется со стороны подвода энергии к объекту);
- в установках с ВРШ регулятор нагрузки уменьшает шаг винта (ограничение осуществляется со стороны потребителя – отвода энергии).
При этом в первом случае ограничение реализуется механизмом защиты, как правило, встроенным в Ремонт автоматики, регуляторов частоты вращения и систем регулированиярегулятор частоты вращения и не имеющим инерционных звеньев (таковыми являются только элементы самого регулятора частоты).
Во втором случае регулятор нагрузки работает одновременно с РЧВ или вслед за ним, если в РН предусматривается запаздывание включения при возникновении перегрузки. В РН фирмы «KaMeWa» предусматривается запаздывание включения регулятора. На рис. 5 приводятся характеристики электронного РН фирмы «KaMeWa».
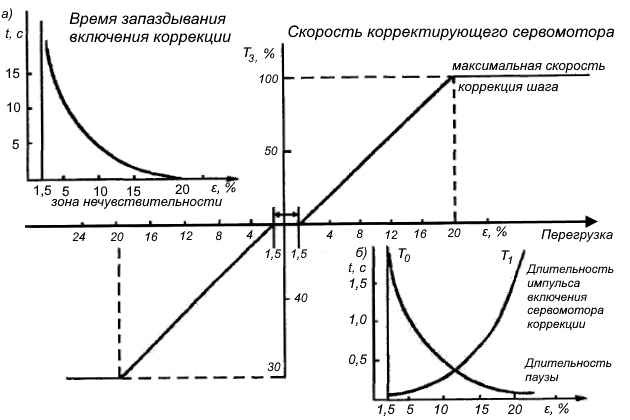
Настройка регулятора осуществляется по следующим параметрам.
- Нечувствительность регулятора (обычно устанавливается 1,5 % перегрузки).
- Время запаздывания включения регулятора (см. рис. 5) при возникновении перегрузки, оно автоматически изменяется в зависимости от величины перегрузки. При незначительном превышении зоны нечувствительности РН включается с запаздыванием 15 с. Таким образом, при кратковременной и небольшой перегрузке на волнении РН не включается, при перегрузке 20 % и более сервомотор РН включается без запаздывания.
- Скорость коррекции шага винта, она также автоматически регулируется и зависит от величины перегрузки (см. рис. 5). Скорость увеличивается при увеличении перегрузки и имеет максимальное значение при перегрузке 20 % и более. Скорость действия корректирующего сервомотора импульсного типа регулируется одновременным изменением длительности импульсов включения T1 сервомотора и длительности пауз T0 между включениями. При незначительном превышении – 1,5 % перегрузки – длительность включения составляет T1 ~ 0,1 с, а пауза между включениями – T0 ~ 1,5 с; при перегрузке около 20 % соотношение обратное; при перегрузке 20 % и более коррекция осуществляется непрерывно (T1 = ∞; T0 = 0), т. е. с максимальной скоростью (vs = max). Диапазон, в котором может работать РН, будет использован полностью при достижении поршнем корректирующего сервомотора крайнего положения. На рис. 6 заштрихованной зоной представлена область рабочих режимов, определяемых РН при перегрузке.
На рис. 7 рассмотрена эксплуатационная ситуация, связанная с утяжелением условий плавания при Безопасность мореплавания во льдахдвижении во льду.
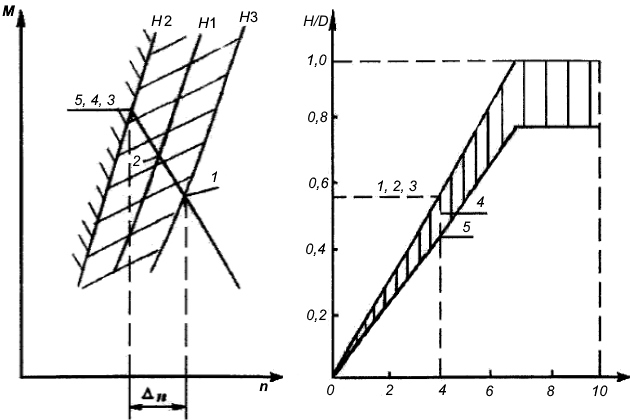
Точка 1 соответствует исходному режиму работы при движении судна по открытой воде со скоростью хода, при положении рукоятки МТ на делении «4,5». Точка 2 соответствует вхождению судна в лед, при этом винтовая характеристика смещается из положения H1/D в положение H2/D. РЧВ, реагируя на падение частоты вращения в связи с утяжелением условий плавания, увеличивает топливоподачу, переводя двигатель на режим, которому соответствует точка 2. Так как этот режим еще находится в зоне нечувствительности РН, последний не вступает в действие.
Точка 3 соответствует вхождению в тяжелый лед, при этом винтовая характеристика смещается в положение H3/D, адекватное выходу двигателя на ограничительную характеристику РН. Перевод двигателя с режима, соответствующего точке 1, на режим в точке 3 был осуществлен РЧВ.
При этом топливоподача увеличилась на величину ∆h1-3, а частота вращения, вследствие неравномерности работы регулятора, снизилась на величину ∆n.
Читайте также: Влияние гребного винта регулируемого шага (ВРШ) и руля на управляемость судна
При дальнейшем утяжелении условий плавания в работу вступает РН, защищая двигатель от перегрузки. Точка 4 соответствует вхождению судна в более тяжелый лед, при этом винтовая характеристика, определяемая внешними условиями, сдвигается дальше влево. Однако РН, реагируя на это возмущение, уменьшает шаг винта, смещая тем самым так называемую «шаговую» винтовую характеристику (определяемую шагом винта) на такую же величину в противоположном направлении – вправо. В результате суммарная нагрузка на винте, фактически воспринимаемая двигателем, остается неизменной.
Точка 5 соответствует движению судна в еще более тяжелом льду. Однако РН при увеличении сопротивления движению уменьшает на соответствующую величину шаг винта, сохраняя тем самым нагрузку двигателя неизменной. Таким образом, во всем диапазоне работы РН частота вращения двигателя и Характеристики систем топливоподачитопливоподача остаются постоянными. Изменение внешних условий от точки 3 до точки 5 соответствует полному ходу корректирующего сервомотора, т. е. полному диапазону работы РН. Так как на дальнейшее утяжеление условий плавания РН не будет реагировать, рабочие режимы, а, следовательно, нагрузку двигателя вновь будет определять РЧВ.
Следует иметь в виду, что РН реагирует на возмущения с запаздыванием, а РЧВ – без запаздывания. Поэтому первым вступает в действие при возникновении возмущения РЧВ, а затем РН. Таким образом, РН и РЧВ работают совместно в зоне работы РН. Вне этой зоны работает только РЧВ.
Характеристики САР частоты вращения дизель-генераторов
Условия работы дизеля в дизель-генераторной установке по основным показателям близки к работе главного двигателя в пропульсивной установке с ВРШ, в которой, как правило, имеется валогенератор и, таким образом, она совмещает функции главной установки и источника энергии в судовой электростанции.
Особенности дизеля в дизель-генераторной установке:
- отсутствие системы реверса, т. е. двигатель – нереверсивный;
- пуск двигателя осуществляется в режиме холостого хода, т. е. без нагрузки;
- двигатель под нагрузкой работает на режиме постоянной, номинальной частоты вращения;
- дизель работает, обычно, в параллель с другим дизелем или группой дизелей.
Эти показатели характерны и для установок с ВРШ.
Пусковая характеристика дизеля дизель-генераторной установки представлена на рис. 8.

Участок пусковой характеристики 0 – 1 соответствует раскручиванию вала двигателя пусковым воздухом до пусковой частоты вращения nп. В точке 1 отключается пусковой воздух и включается топливо, т. е. в данном случае пуск осуществляется по раздельному принципу.
Участок 1 – 2 соответствует установке в точке 2 пусковой величины топливоподачи, при которой двигатель начинает работать на топливе.
На участке 2 – 3 частота быстро увеличивается до заданной при пуске частоты холостого хода nхх.
На участке 3 – 4 происходит снижение топливоподачи регулятором частоты с пусковой до величины, соответствующей режиму холостого хода, на котором пускался двигатель (при пуске генератор не подключен к судовой сети).
Участок 4 – 5 соответствует выводу на режим номинальной частоты вращения nн путем повышения задания по частоте на регуляторе частоты двигателя.
Выводом двигателя на режим номинальной частоты вращения в точке 5 осуществляется процесс синхронизации вводимого в работу двигателя с работающим нагруженным двигателем (рис. 9).
При синхронизации не следует добиваться точного согласования частот двигателей. Целесообразно, чтобы перед подключением к сети генератора вводимого в работу двигателя, его частота несколько превышала частоту работающего под нагрузкой двигателя. В этом случает при подключении генератора к сети вводимый в работу двигатель возьмет на себя часть нагрузки электростанции и тем самым будет предотвращена возможность ввода генератора в режим электродвигателя в момент его подключения к сети.
Предлагается к прочтению: Режимы работы судовых дизелей
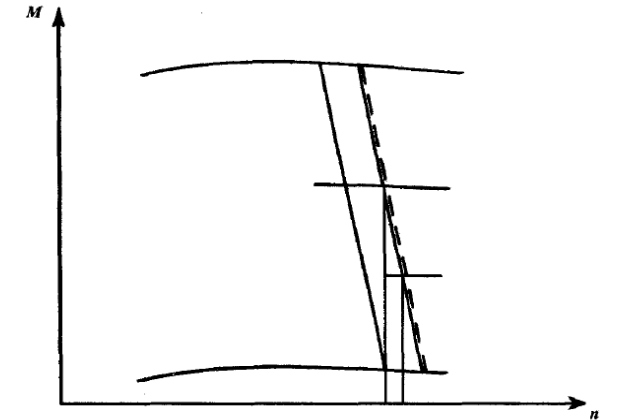
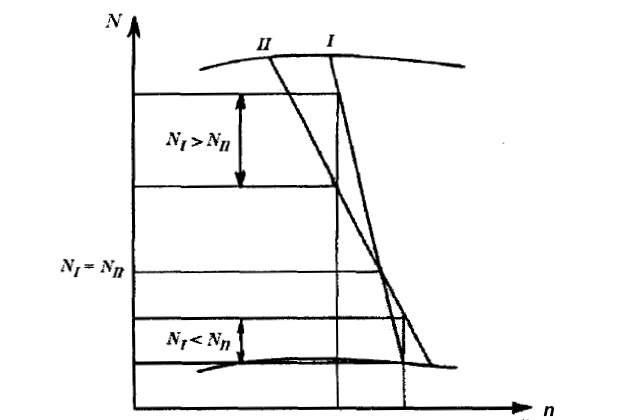
Нагрузка электростанции останется распределенной между двигателями неравномерно в связи с различным заданием по частоте на регуляторах частоты обоих двигателей (см. рис. 9). Регуляторные характеристики не совмещены. При условии одинаковой неравномерности обоих регуляторов их регуляторные характеристики должны быть совмещены, т. е. должны иметь одинаковые задания по частоте. В этом случае любую текущую нагрузку электростанции двигатели будут делить поровну. Таким образом, равномерное распределение нагрузки между двигателями одинаковой номинальной мощности обеспечивается одинаковой настройкой регуляторов частоты по неравномерности и одинаковым заданием по частоте вращения (рис. 10).
При различной настройке регуляторов по неравномерности будет наблюдаться неравномерное распределение нагрузки между двигателями (рис. 11).
При этом с изменением нагрузки электростанции разница в принятой двигателями нагрузке также будет изменяться.
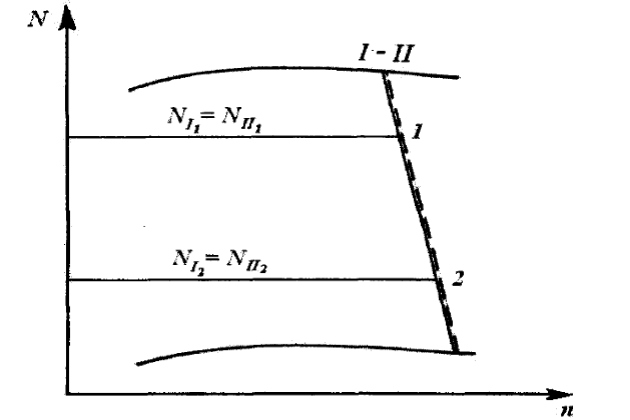
Постоянная величина, на которую различается нагрузка двигателей при различной нагрузке электростанции, будет наблюдаться при одинаковой неравномерности и различном задании по частоте (рис. 12).

Следует иметь в виду, что причиной неравномерного распределения нагрузки могут быть в числе прочих состояние топливной аппаратуры и регулятора частоты и пр. Перераспределение нагрузки между двигателями (при вводе двигателя под нагрузку, выводе двигателя из-под нагрузки для последующей его остановки, при выравнивании нагрузок двигателей) осуществляется изменением задания по частоте одного из двигателей или обоих двигателей одновременно (если требуется сохранить фактическую частоту неизменной во время выполнения операции по перераспределению нагрузки двигателей).
При совместной работе двигателей различной номинальной мощности нагрузка распределяется между ними пропорционально их номинальной мощности (рис. 13)