Автоматизация судовых систем играет ключевую роль в обеспечении безопасности, эффективности и надежности эксплуатации современного флота. Уровень сложности и требовательности к точности управления постоянно растет, особенно в отношении главных энергетических установок. Эффективная настройка параметров системы ДАУ главного двигателя (дистанционного автоматизированного управления) критически важна для оптимизации работы судна.
- Функции системы ДАУ
- Структура системы ДАУ
- Алгоритм управления
- Алгоритм пуска
- Параметры настройки системы ДАУ
- Характеристики маневровых режимов
- Характеристики пуска
- Характеристики реверса
- Характеристики изменения режима
- Типовые механизмы системы управления
- Пневмозадатчик
- Сельсины
- Потенциометрический датчик
- Тахогенератор
- Электронный усилитель
- Реле
- Клапаны
- Электродвигатель переменного тока
- Пневматический сервомотор
В данной статье мы рассмотрим основные элементы, составляющие основу систем дистанционного управления, как классических, так и современных систем дистанционного управления судовыми двигателями. Ключевыми компонентами, обеспечивающими сбор данных, управление и исполнительные действия, являются:
- сельсины,
- потенциометрические датчики,
- и тахогенераторы,
которые служат для точного измерения угловых перемещений, положения и скорости. Электронный усилитель и реле отвечают за обработку сигналов и формирование управляющих команд. Особое внимание будет уделено исполнительным механизмам, таким как электродвигатели переменного тока, а также пневматическим элементам, включая клапаны и пневматический сервомотор. Кроме того, мы разберем принцип работы пневмодатчика в системе ДАУ, подчеркивая его важность в условиях, где пневматика остается надежным и распространенным решением. Понимание взаимодействия этих элементов необходимо для глубокого осмысления функционирования современных судовых систем автоматики.
Система дистанционного автоматизированного управления (система ДАУ) позволяет устанавливать необходимую программу для управления скоростью и направлением движения судна, изменяя частоту вращения главного двигателя (ГД) и направление упора гребного вала.
Функции системы ДАУ
Системами ДАУ предусматриваются, как правило, следующие основные функции:
- Управление осуществляется по одной из двух программ: маневровой (нормальной) или аварийной (экстренной). Основной является маневровая программа. Аварийная включается только в аварийной для судна ситуации (опасность столкновения, навала, посадки на грунт), т. е. когда требуется быстрое исполнение маневра, в связи с чем в двигателе возникают повышенные, опасные для него напряжения. Возможно также применение третьей программы – разогрева (замедленной), которая предусматривает более длительный, чем по маневровой программе, процесс перевода ГД с исходного на ходовой режим.
- Выполняются штатные блокировочные функции, реализуемые РПС.
- Установка пускового задания по частоте вращения на входе ВРЧВ.
- Установка пускового ограничения Процессы топливоподачи в СДВСтопливоподачи (максимально допустимой в период пуска).
- Медленное проворачивание перед пуском, если после остановки двигатель не работал, например, в течение получаса.
- Отсечка (прекращение подачи) пускового воздуха при достижении пусковой частоты вращения (по сигналу от датчика частоты вращения).
- Отсечка пускового воздуха по истечении установленного времени длительности при затяжном пуске, т. е. когда не достигнута пусковая частота вращения (по сигналу от реле времени пуска).
- Повторные автоматические попытки пуска в случае самопроизвольной остановки двигателя после отсечки пускового воздуха при достижении пусковой частоты вращения. Обычно предусматриваются три попытки пуска. Сигнал на повторные попытки поступает от реле отсчета попыток пуска.
- Переключение с пускового задания на режим с мостика и отключение пускового ограничения топливоподачи при достижении пусковой частоты вращения.
- Вывод двигателя на заданный режим по программе разгона двигателя (обычно аппроксимируется экспоненциальную характеристику).
- При наличии зоны критической (резонансной) частоты вращения предусматривается быстрое прохождение зоны.
- Предусматривается запрет Способы управления главным СДВСработы двигателя в критической зоне, если заданный режим совпал с критической частотой. Двигатель выводится на режим на границе зоны и удерживается на нем до тех пор, пока задание не будет изменено.
- Требуемый режим задается по частоте вращения, т. е. задание поступает на вход ВРЧВ.
- Предусматривается защита двигателя от «перегрузки» при плавании в тяжелых условиях, например, ледовых.
- Предусматривается защита от самопроизвольной остановки двигателя при работе на режиме «самого малого хода». Защита обеспечивается устройствами, осуществляющими ограничение по минимальной задаваемой частоте вращения и минимальной топливоподаче.
Автоматизированное управление в случае возникновения аварийных ситуаций предусматривает две кнопки: «Аварийная остановка» и «Аварийная работа».
Аварийная программа, в отличие от нормальной, предусматривает:
- ускоренный вывод двигателя на заданный режим;
- повышенное пусковое задание по частоте вращения;
- повышенную пусковую топливоподачу;
- повышенную пусковую частоту вращения (частоту отсечки пускового воздуха);
- отключение защиты двигателя.
При автоматических повторных попытках пуска также автоматически увеличиваются уставки вышеперечисленных пусковых параметров.
Структура системы ДАУ
Система ДАУ ГД предусматривает на мостике один основной орган управления – рукоятку, совмещенную с машинным телеграфом. Рукоятка воздействует, как правило, на следующие командные элементы системы: задатчики направления вращения вала («вперед» и «назад») и соответствующий заданному режиму задатчик частоты вращения. Команды от задатчиков поступают в блок логики (БЛ).
Предусматриваются также два органа управления аварийного назначения:
- кнопка «Аварийная остановка» – для остановки двигателя, если при подаче команды «Стоп» штатная система управления не останавливается двигатель;
- кнопка «Аварийная работа» – для переключения на «Аварийную программу» управления в аварийной для судна ситуации.
Из БЛ командные сигналы поступают в цепи, реализующие основные операции процесса управления: реверса (вперед, назад), пуска изменения режима, остановки. Сигналы из БЛ вначале поступают на элементы усиления (от низкого уровня, соответствующего функционированию в БЛ, до силового уровня), далее – на электропневматические преобразователи (электромагнитные клапаны и преобразователи других типов), затем – на элементы (клапаны) переключения постов управления ДПУ (на мостике) – ЦПУ, далее – на штатные механизмы реверсивно-пусковой системы двигателя.
Будет интересно: Процессы в судовых системах автоматического управления. Особенности настройки регуляторов
Кроме командных сигналов с мостика в блок логики также поступают сигналы датчиков обратных связей, установленных на двигателе. Тем самых обеспечивается необходимая последовательность выдачи сигналов в силовые цепи в соответствии с алгоритмом управления.
Типовые сигналы обратных связей:
- о положении распредорганов: вперед, назад (сигнал о завершении реверса РО);
- о положении рейки Основные конструкции топливных насосов и форсуноктопливных насосов: топливо включено – выключено (РТН в нулевом положении, команда «Стоп» выполнена);
- о фактическом направлении вращения вала: вперед-назад (при несоответствии заданного и фактического направления вращения подача топлива должна быть запрещена);
- пусковая частота вращения достигнута, это значит, что должна быть подана команда на отключение пускового воздуха.
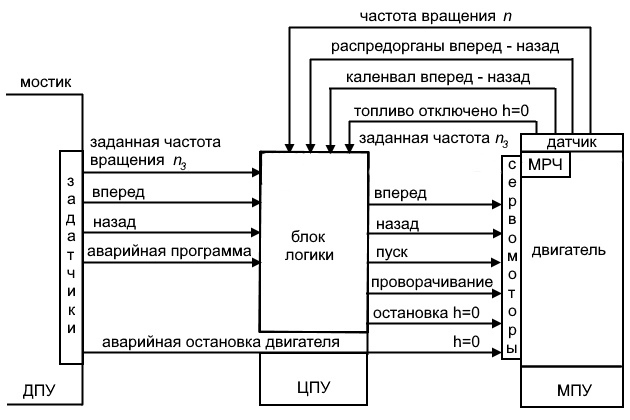
Тип регулятора частоты вращения определяет схему его подключения к системе управления и двигателю. На рис. 1 приведена схема подключения механического регулятора частоты (МРЧ).
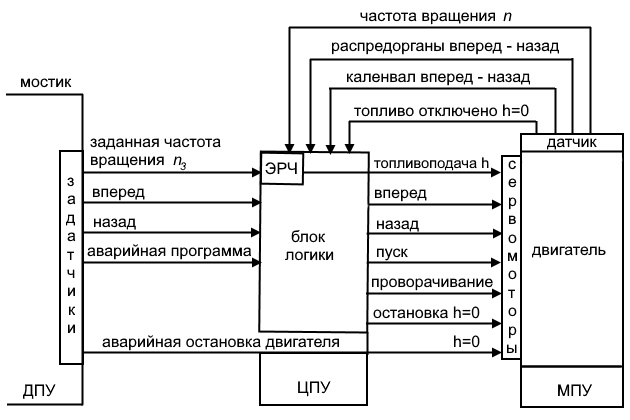
На рис. 2 представлена схема подключения электронного регулятора частоты (ЭРЧ).
Включение ДАУ осуществляется переключателем постов управления ДПУ (мостик) – ЦПУ на панели ЦПУ. При этом питание подается в систему ДАУ, и элементы переключения в цепях управления подключают выходные каналы системы ДАУ к соответствующим каналам штатной системы управления.
Алгоритм управления
Алгоритм – система операций, применяемых по строго определенным правилам, которые после последовательного их выполнения приводят к решению поставленной задачи.
Алгоритм автоматизированного управления главного двигателя (ГД) реализуется элементами цепей реверса, пуска, изменения режима и останова системы ДАУ. Пуску и работе двигателя предшествуют операции по приведению установки в состояние готовности к работе, а именно включаются насосы смазки, охлаждения, топлива, включается подогреватель тяжелого топлива, открывается запорный клапан на баллоне пускового воздуха, отключается валоповоротное устройство и пр.
Читайте также: Система электронного управления топливоподачей
Системой ДАУ при включении устанавливается пусковое задание по частоте вращения на входе ВРЧВ и проверяется положение РТН (перед пуском рейка должна быть в нулевом положении, т. е. топливо отключено).
Элементами защиты и блокировки (запрета) системы ДАУ осуществляется контроль готовности ГД к работе при наличии нормального давления в системах смазки, охлаждения, топлива, пускового воздуха, необходимой температуры и прочих параметров.
Подготовка установки к работе завершается выполнением следующих процедур:
- проверкой исправности машинного телеграфа;
- проверкой системы ДАУ при передаче автоматизированного управления ГД на дистанционный пост управления на мостике.
Далее рассматривается алгоритм пуска, являющийся составной частью алгоритма управления.
Алгоритм пуска
Алгоритм пуска ГД при перемещении рукоятки управления (рукоятки МТ) из положения «Стоп», например, в положение «Самый малый вперед» предусматривает указанную далее последовательность операций:
- Проверка (контроль) готовности установки к работе в соответствии с перечнем параметров, контролируемых системой защиты ГД.
- От задатчика, связанного с РУ, команда поступает в блок логики (БЛ) системы ДАУ.
- Из БЛ командный сигнал поступает в цепь реверса РО на элементы усиления и преобразования.
- Силовой сигнал поступает в сервомотор реверса, который вводит в действие механизмы реверса РО штатной реверсивно-пусковой системы двигателя.
- От датчика реверса распредорганов сигнал о завершении реверса РО поступает в БЛ.
- При соответствии заданного направления пуска двигателя и положения его РО из БЛ командный сигнал поступает на элементы усиления (ЭУ) цепи пуска, т. е. дается команда на начало пуска двигателя.
- От ЭУ управляющее воздействие (управляющий воздух) поступает на открытие главного пускового клапана (ГПК).
- При открытии ГПК пусковой воздух поступает к воздухораспределителю (ВР), от ГПК и ВР – к пусковым клапанам (ПК) на крышках цилиндров и далее – в цилиндры двигателя.
- В двигателях со смешанным типом пуска из БЛ одновременно подается команда на подачу пускового воздуха и на включение топлива.
- В соответствии с пусковым заданием на входе ВРЧВ, механизм пусковой топливоподачи устанавливает РТН в соответствующее пуску положение.
- Одновременно с подачей команды на пуск включается реле времени (РВр), настройкой которого определяется максимальная продолжительность пуска при затянувшемся пуске.
- Включается реле отсчета автоматических попыток пуска.
- С началом вращения вала двигателя на воздухе от датчика частоты вращения (ДЧВ) в БЛ поступает сигнал, пропорциональный частоте вращения. При достижении пусковой частоты вращения из БЛ одновременно поступают команды:
- При различии пускового и рабочего заданий после переключения с пускового на задатчик частоты с мостика начинается изменение командного сигнала на входе ВРЧВ (по программе изменения режимов, предусмотренной системой ДАУ).
- Если при пуске обороты вала не достигают пусковой частоты вращения, то пуск прекращается по сигналу реле времени, настроенного на максимально допустимую продолжительность пуска. При этом включается сигнал «Пуск не состоялся», и дальнейшая работа ДАУ блокируется.
- Если при пуске двигателя достигается пусковая частота вращения, но после отключения пускового воздуха двигатель глохнет, то по сигналу реле отсчета попыток пуска (реле повторных попыток пуска) осуществляются две автоматические повторные попытки пуска. При повторных попытках пуска может предусматриваться автоматическое повышение пусковых уставок: пусковой частоты вращения, пускового задания по частоте на входе ВРЧВ, пусковой топливоподачи. Если все попытки пуска оказались неудачными, то включается сигнал «Пуск не состоялся», и дальнейшая работа ДАУ блокируется.
- При отключении пускового воздуха одновременно происходит переключение с пускового на заданный с мостика режим.
- В системах управления двигателями с раздельным пуском могут предусматриваться дополнительные реле времени для задержки исполнения отдельных команд. В цепи управления пусковым воздухом реле времени задерживает закрытие ГПК при достижении пусковой частоты, но в то же время топливоподача включается без задержки. Таким образом, вводится краткий период смешанного пуска.
- Реле времени в цепи задания частоты вращения при достижении пусковой частоты задерживает переключение на рабочий (заданный с мостика) режим.
- Пуск двигателя в процессе реверса при движении судна и наличии значительного турбинного момента на гребном винте начинается с контрпускового режима, при котором в начальный период пуска воздух, поступающий в цилиндры двигателя, выполняет тормозную функцию. Только после остановки коленчатого вала начинается его вращение в требуемом направлении, т. е. обычный пуск двигателя. Ситуация с контрпуском контролируется определителем направления вращения, который блокирует топливоподачу, если фактическое направление вращения коленвала не совпадает с заданным.
Аварийный пуск (пуск по аварийной программе) отличается в основном повышенными уставками пусковых параметров, состав которых неодинаков в различных системах управления:
- задаваемая пусковая частота вращения (на входе ВРЧВ);
- фактическая частота вращения отсечки пускового воздуха;
- пусковая топливоподача.
В установках с автономной воздуходувкой (АВ) при подаче команды на пуск двигателя одновременно с подачей пускового воздуха включается АВ, отключающаяся в следующих случаях:
- либо при достижении определенной частоты вращения;
- либо при достижении частоты вращения, при которой производительность турбонагнетателя достигает нормального уровня.
В двигателях с аккумуляторной системой топливоподачи предусматривается возможность автономного по цилиндрам управления топливоподачей при пусках и регулирование на рабочих режимах.
Параметры настройки системы ДАУ
Параметрами настройки системы ДАУ являются:
- пусковое задание по частоте вращения на входе в ВРЧВ;
- длительность удержания пускового задания при раздельном пуске;
- пусковое ограничение топливоподачи;
- пусковая частота вращения;
- длительность пуска при затянувшемся пуске (когда не достигается пусковая частота);
- время запаздывания отсечки пускового воздуха при раздельном пуске;
- частота вращения контрпуска (частота начала контрпуска);
- максимальная задаваемая частота вращения;
- максимально допустимая топливоподача;
- минимальная задаваемая частота вращения
- минимально допустимая топливоподача;
- программное время вывода двигателя на режим от самого малого до полного хода – по каждой из программ управления;
- настройка параметров защиты двигателя от перегрузки (соответствие частоты вращения – топлива и воздуха – топлива).
Характеристики маневровых режимов
Система ДАУ должна обеспечивать надежный пуск (контрпуск) двигателя – торможение, раскручивание воздухом и перевод на топливо при нормальных условиях маневрирования: за минимальное время, при минимальном расходе пускового воздуха, при оптимальных значениях механических и тепловых напряжений в двигателе (напряжения в переходных процессах не должны быть больше напряжений при работе на номинальном режима). При этом должен быть исключен заброс газов в пусковую воздушную магистраль и другие отклонения от условий нормального реверса и пуска.
При аварийном маневрировании минимальное время маневрирования является определяющим, все остальные факторы должны быть подчинены ему.
Маневровые свойства комплекса в значительной мере определяются пусковыми и реверсивными свойствами двигателя.
Основные показатели качества, которым отвечает пуск и реверс главного двигателя являются:
- число оборотов контрпуска;
- число оборотов отсечки пускового воздуха;
- величина пусковой топливоподачи.
- Первый показатель определяет длительность реверса двигателя на ходу судна, а следовательно, и выбег судна при его торможении двигателем;
- второй – длительность пуска и расход пускового воздуха;
- третий – тепловую и механическую напряженность двигателя при пуске и переходе на топливо, в первую очередь, при первых вспышках топлива.
Характеристики пуска
Рассмотрим последовательность операций при пуске главного двигателя. Пуск (с контрпуском) включает следующие этапы:
- торможение двигателя контрвоздухом;
- раскручивание его воздухом;
- организация пусковой топливоподачи;
- вывод двигателя на устойчивую работу на топливе.
На каждом этапе должны обеспечиваться условия переходного процесса, которые, как правило, характеризуются экстремальными значениями ряда параметров.
Рассмотрим каждый из них подробнее.
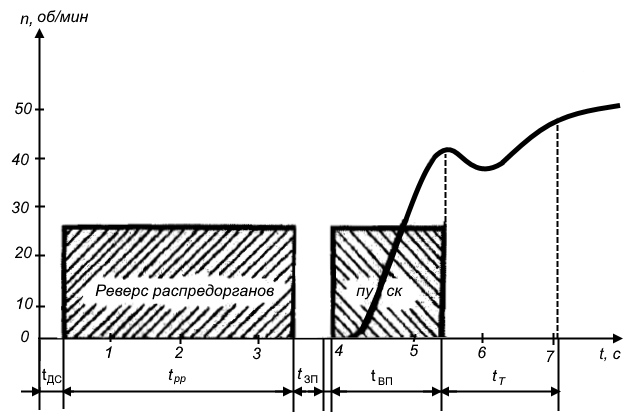
Длительность пуска. Общее время пуска складывается из следующих элементов переходного процесса (рис. 3):
где:
- tДС – время передачи сигнала дистанционной связью системы ДАУ;
- tРР – время реверса распредорганов двигателя;
- tЗП – время запаздывания пуска;
- tВП – время пуска;
- tт – время разгона на топливе (до выхода двигателя на режим устойчивой работы на топливе).
Следует иметь в виду, что
где:
- Мс – момент сопротивления на винте;
- pПВ – давление пускового воздуха.
Расход пускового воздуха. На рис. 4 приведена зависимость расхода пускового воздуха (в литрах на литр объема цилиндра двигателя) от его давления.
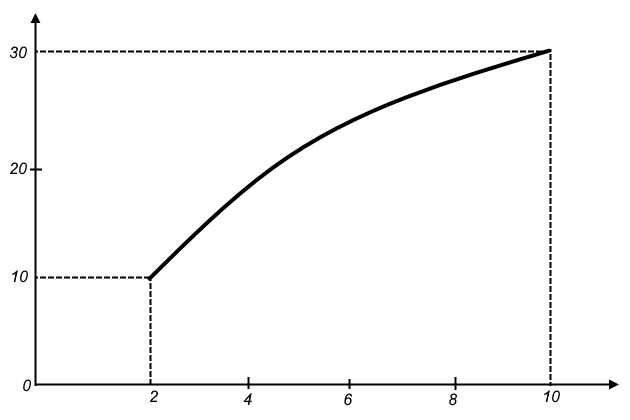
Как видно из рисунка, расход воздуха уменьшается с 10 л/л при 30 бар до 2 л/л при 10 бар при автоматизированном управлении. При ручном управлении расход воздуха несколько ниже. Повышенный расход воздуха при автоматизированном управлении объясняется жесткой уставкой отсечки пускового воздуха, рассчитанной для наиболее тяжелых условий пуска, которое при обычном маневрировании случаются довольно редко. Для уменьшения расхода пускового воздуха рекомендуется производить пуск из одного баллона с давлением воздуха 15-20 бар. В другом резервном баллоне поддерживается давление воздуха 25-30 бар.
Топливоподача при пуске. Величина пусковой топливоподачи устанавливается из условия надежного перевода дизеля на топливо при сохранении рабочих параметров двигателя, определяющих его механическую и тепловую напряженность, в допустимых пределах:
где:
- t°д – температура двигателя;
- Мс – момент сопротивления на винте;
- Vс и Hс – скорость и осадка судна;
- βр – угол поворота руля;
где:
- qн – топливоподача на нормальном режиме двигателя (0,4 – устанавливается при нормальном пуске; 0,6 – при аварийном (тяжелом) пуске).
Механическая напряженность при пуске характеризуется следующими параметрами двигателя:
В качестве типовых можно принять:
Характеристики реверса
Система ДАУ дизеля с прямой прямой передачей на Влияние гребного винта фиксированного шага (ВФШ) и руля на управляемость суднавинт фиксированного шага должна обеспечивать быстрое реверсирование дизеля. Однако реверсивные свойства комплекса в основном зависят от свойств объектов управления (дизеля и судна) и условий маневрирования (рис. 5).

При малой скорости судна реверс не представляет трудностей. Однако на среднем и тем более на полном ходу для реверса дизеля требуется значительное время, которое зависит от водоизмещения судна и его скорости.
Для Оптимальные способы торможения судовэффективного торможения необходимо, чтобы Мт + Мс > Мв.
Для раскручивания двигателя воздухом необходимо, чтобы
.
Характеристики изменения режима
Изменение режима осуществляется по одной из программ разгона.
Программой называется последовательность операций определенной длительности, выполняемых с некоторой скоростью через установленные интервалы времени.
Программное изменение скорости двигателя обеспечивает его вывод на заданный режим за минимальное время при сохранении тепловой напряженности двигателя в допустимых пределах. При ручном обслуживании механик управляет двигателем в соответствии с инструкцией по обслуживанию и опытом работы. Большинство современных систем ДАУ предусматривает только программный разгон двигателя. Снижение скоростного режима производится с максимальной скоростью, часто в следующем режиме. Разгон обычно осуществляется по одной их трех программ:
- нормальной (маневровой);
- замедленной (ходовой);
- экстренной (аварийной).
Типовая схема программного управления предусматривает:
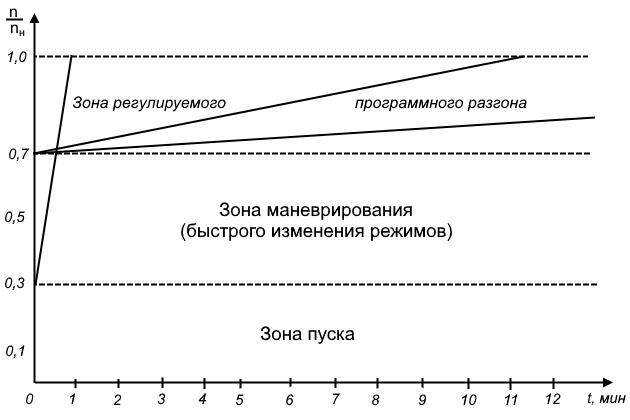
- разгон двигателя в диапазоне от 0,3 nн до 0,7 nн только по одной (нормальной) программе приблизительно за 30 с или в следящем режиме, т. е. за 5-10 с. Этот участок обычно относят к нормальной программе разгона, так как именно в указанном диапазоне задаются режимы двигателя при обычном маневрировании, выполняемом по нормальной программе;
- разгон двигателя по различным программам. Эти программы разгона (нормальная, замедленная, аварийная) вводятся, как правило, только в диапазоне от 0,7 nн до 1,0 nн.
Аварийная программа осуществляется путем сохранения на участке от 0,7 nн до 1,0 nн той же скорости, которая была на предыдущем участке, т. е. до 0,7 nн.
Нормальная программа осуществляется путем уменьшения скорости разгона на участке – 0,7 nн – 1,0 nн по сравнению со скоростью разгона на предыдущем участке – до 0,7 nн.
Замедленная программа осуществляется путем введения в нормальную программу на участке от 0,7 nн до 1,0 nн временных пауз, длительность которых регулируется.
Таким образом, весь диапазон Режимы работы судовых дизелейскоростных режимов двигателя может быть разделен на три зоны (рис. 6):
I зона – от 0 до 0,3 nн (до 0,25 ÷ 0,35 nн) – является зоной пуска, т. е. раскручивания двигателя на воздухе. Время прохождения этой зоны определяется длительностью пуска и составляет 1 ÷ 3 с;
II зона – 0,3 nн – 0,7 nн – является зоной маневрирования, зоной быстрого разгона или, как было отмечено выше, зоной одной (нормальной) программы. Время ее прохождения ~ 30 с или в режиме слежения 3 ÷ 6 с;
III зона – от 0,7 nн до 1,0 nн – является зоной регулируемого программного разгона длительностью:
- по аварийной программе – 30 ÷ 90 с;
- по нормальной программе – 10 ÷ 404 мин;
- по замедленной программе – от 18 мин до 2 ч, т. е. время разгона, реализуемое в разных системах, различается значительно.
Типовые механизмы системы управления
Базовым устройством системы ДАУ является электронный блок логики (БЛ), обеспечивающий функционирование системы в соответствии с алгоритмом управления с учетом свойств командных элементов-задатчиков, датчиков обратных связей, исполнительных механизмов-сервомоторов. Далее приводятся типовые механизмы систем управления.
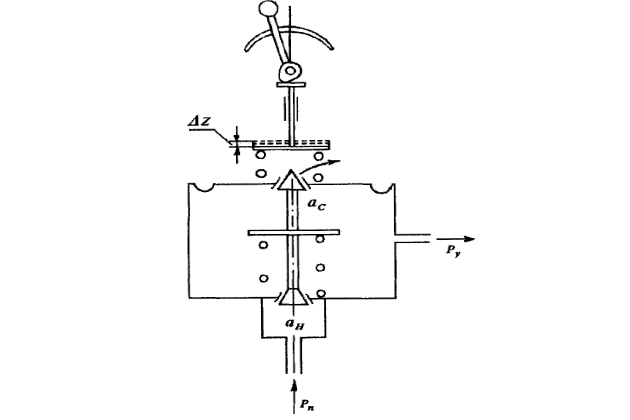
Пневмозадатчик
Уравнение пневмозадатчика (рис. 7) может быть записано в виде:
где:
- – оператор дифференцирования;
- – относительные величины перемещения штока вневмозадатчика и изменения давления в его выходной камере, определяемые по формулам:
где:
- индексом «0» обозначены переменные на исходном режиме;
- pп и pу – давление воздуха перед пневмозадатчиком и за ним.
где:
- μв – коэффициент расхода;
- T и R – соответственно температура и постоянная воздуха;
- V – объем выходной камеры пневмозадатчика;
где:
- Sс – площадь сильфона пневмозадатчика;
- dн и dс – диаметры клапанов наполнения и стравливания;
- c1 и c2 – жесткость пружин пневмозадатчика;
Характер изменения давления в выпускной камере пневмозадатчика почти не зависит от протяженности и емкости воздушной магистрали за ним.
Постоянной времени пневмозадатчика можно пренебречь, так как она на порядок меньше постоянной времени трубопровода, при значительной его длине за пневмозадатчиком.
При этом уравнение динамики пневмозадатчика примет вид
т. е. пневмозадатчик рассматривается как простое безынерционное звено.
Сельсины
А. Сельсины, работающие в трансформаторном режиме. Входным параметром датчика является разность угловых положений роторов сельсина-датчика (СД) и сельсина-приемника (СП), выходным параметром – напряжение, наводимое в статорной обмотке СП.
Зависимость выходного напряжения от угла рассогласования положения роторов может быть представлена в виде:
где:
- ϑс и χСД – относительные величины изменения выходного напряжения Uвых и угла рассогласования роторов θ.
Эти величины определяются по формулам:
При работе сельсинов в трансформаторном режиме ротор СП зафиксирован, т. е. β = const, изменяется только положение ротора СД, т. е. α = var. При малых углах α можно считать Uвых пропорциональным α.
Тогда:
где:
- Uт при нулевом рассогласовании θ рассчитывается по формуле:
где:
- kпэ – коэффициент пропорциональности ЭДС;
- Eт – эффективное значение ЭДС, наводимое в обмотке при α = 0;
- Rоб – сопротивление каждой фазовой обмотки ротора.
Б. Сельсины, работающие в индикаторном режиме. Входным параметром системы является разность углового положения роторов θ, выходным может быть принято угловое отклонение ротора СП β либо синхронизирующий момент Мсинх, обеспечивающий синхронное вращение ротора СП и ротора СД. Этот режим обычно применяется в машинном телеграфе и поэтому здесь не рассматривается.
Потенциометрический датчик
Входным параметром потенциометра является перемещение движка χп, выходным – напряжение на его выходных клеммах. При точном описании датчика напряжение на выходе зависит от перемещения движка нелинейно. Однако, если сопротивление нагрузки превышает сопротивление потенциометра с 10-100 раз, то он может считаться линейным звеном, так как максимальное от линейного закона не превышает 1,5 %. В автоматических системах обеспечить указанное различие в величинах сопротивления потенциометра и нагрузки обычно не представляет труда. Поэтому потенциометр может описываться как безынерционное звено:
где:
- ϑп и ζп – относительные величины изменения и перемещения движка потенциометра, которые могут быть определены следующим образом:
где:
- Uвх – напряжение питания потенциометра;
- lп – длина потенциометра.
В системах ДАУ используются также двухтактные потенциометры, в которых знак выходного напряжения изменяется при изменении знака входного сигнала.
Тахогенератор
Входным параметром является Указатели угловой скорости поворотаугловая скорость вала, выходным – напряжение. При подборе конструктивных параметров тахогенератора (в частности, обмотки якоря, компенсационной обмотки и сопротивления шунта) необходимо, чтобы зависимость напряжения от числа оборотов была линейной. Поэтому динамика тахогенератора может быть описана уравнением:
где:
- ϑтг и φтг – относительные величины отклонения напряжения и оборотов тахогенератора, рассчитываемые следующим образом:
где:
- c – конструктивная постоянная тахогенератора;
- Uв – напряжение на обмотке возбуждения;
где:
- ϖв и Rв – число витков и сопротивление возбуждения;
где:
- Rя; Rн; Rк; Rш – сопротивление якоря нагрузки, компенсационной и шунтирующей обмоток.
Электронный усилитель
Полупроводниковый триод может рассматриваться как безынерционное звено. В этом случае он описывается уравнением:
где:
- ϑэу и ϑэу вх – относительные величины напряжения на входе и выходе усилителя.
kэу при наибольшем усилении (Rн = ∞; Rс = 0) определяется по формуле:
где:
- Rн; Rс; rг; rб; rэ – сопротивления нагрузки, входной цепи, генераторное, базы и эмиттера;
- значение kmax = 100 – для точечных триодов;
- kmax = 2 000 – для плоских триодов.
Реле
В качестве входного и выходного параметров электромагнитного реле обычно принимается напряжение. При необходимости могут быть приняты и другие величины, например, на входе – сила тока, на выходе – перемещение якоря.
Электромагнитное реле (как и реле других типов), ввиду быстродействия протекающих в нем процессов, может рассматриваться как элемент, состоящий из двух звеньев: звена чистого запаздывания и безынерционного нелинейного (релейного) звена.
Предлагается к прочтению: Понятия об элементах и методах анализа дискретных систем автоматического управления
Часто временем срабатывания и отпускания реле пренебрегают ввиду его малости по сравнению с длительностью переходных процессов в других элементах автоматической системы (для электромагнитного реле время срабатывания составляет 1-200 мс). В этом случае уравнение динамики реле будет иметь вид:
где:
- ϑр и ϑр вх – относительные величины изменения напряжения на выходе и входе реле;
- kр ≈ 10 ÷ 106 – для электромагнитных реле.
Клапаны
Значительную группу элементов ДАУА. Пневматический клапан. В общем случае пневматический клапан может быть представлен как апериодическое звено II порядка. При этом его динамика может быть описана уравнением:
где:
- – перемещение и масса клапана;
- pу – давление в управляющей полости клапана;
- Sк – площадь управляющего поршня клапана;
- Rк – сила трения;
- Gк – нагрузка, обычно определяемая давлением воздуха на клапан;
- Kк – сжатие пружины.
Сила трения определяется в виде следующей функции:
т. е. как суммы вязкого и сухого трения.
Сжатие пружины определяется следующим образом:
где:
- – предварительное сжатие пружины;
- ск – жесткость пружины.
Иногда силами инерции
,трения Rк и нагрузки Gк можно пренебречь ввиду их малости по сравнению с давлением pу. В этом случае клапан рассматривается как безынерционное звено.
Обычно характеристики клапана подбираются таким образом, чтобы можно было обеспечить его максимальное быстродействие. В этом случае клапан может рассматриваться как релейное звено:
где:
- – относительные величины перемещения клапана и изменения давления в его управляющей полости, определяемые следующими уравнениями:
Если в качестве выходного параметра рассматривать давление в магистрали за клапаном, то уравнение динамики примет вид:
Б. Электромагнитный клапан. В качестве входного параметра в нем принимается сила, создаваемая электромагнитом Fм,
Причем, ввиду малости влияния x величина Fм может быть определена из уравнения:
где:
- – коэффициент пропорциональности.
Сила тока, в свою очередь, зависит от входного напряжения. Эта зависимость определяется уравнением:
где:
В результате сила, создаваемая магнитом, будет определяться по формуле:
где:
Электродвигатель переменного тока
Входной параметр – управляющее напряжение Uу, выходной – скорость или угол поворота вала двигателя. Уравнение динамики двигателя:
где:
- – относительные величины изменения скорости и управляющего напряжения, определяемые следующим образом:
где:
- – сопротивление статора и ротора;
- – коэффициент магнитной индукции.
От угловой скорости при необходимости легко можно перейти к углу поворота вала α = Ω.
Пневматический сервомотор
В сервомоторе одностороннего действия в качестве входного параметра может быть принято давление в цилиндре сервомотора, выходного – перемещение его поршня. Уравнение динамики сервомотора, без учета сил инерции, может быть записано в виде:
где:
- – относительные величины перемещения поршня и изменения давления в сервомоторе, определяемые следующим образом:
где:
- cв – коэффициент вязкого трения;
- cп – жесткость пружины.






у нас слетели мозги ДАУ на теплоходе. тип паром. есть ли у вас специалист который бы смог срочно помочь? Светлана 89104040517