Радиолокация – это мощный инструмент, позволяющий обнаруживать и определять характеристики различных объектов с помощью радиоволн. Она нашла широкое применение во многих областях, от авиации и судоходства до метеорологии и астрономии.
Современное судоходство предъявляет высочайшие требования к безопасности плавания. Ключевую роль в этом играет навигационное оборудование, в частности, радиолокационные системы (РЛС). РЛС позволяют обнаруживать другие суда, береговые объекты и опасности, даже в условиях ограниченной видимости, обеспечивая безопасное движение судна.
Повышение эффективности работы морского флота предъявляет повышенные требования к радиолокационным и радионавигационным приборам, установленным на судах. Эти приборы должны обеспечивать надежную и качественную радиолокацию и радионавигацию, а также поддерживать автоматическое управление движением судна.
Моряки должны уметь работать с современным оборудованием, анализировать данные и принимать обоснованные решения в сложных навигационных ситуациях.
Навигационные радиолокационные системы
Радар, или радиолокационная станция, работает по принципу эхолокации. РЛС излучает радиоволны, которые, отразившись от объектов, возвращаются обратно. По времени, затраченному радиоволной на путь туда и обратно, определяется расстояние до объекта. А по направлению, в котором была принята отраженная волна, определяется его положение. Полученные данные отображаются на экране РЛС в виде точек или линий.
Что такое радиолокационный объект?
Любой объект, способный отражать радиоволны, может быть обнаружен РЛС. Это могут быть как небольшие объекты (буи, вехи), так и крупные суда, острова или береговые линии. Даже птицы и ледяные образования могут быть видны на экране радара, если они достаточно велики и находятся на близком расстоянии.
Типы радиолокационных объектов:
- Точечные объекты: Малоразмерные объекты, которые на экране РЛС выглядят как точки. К ним относятся буи, вехи, небольшие суда на большом расстоянии.
- Протяженные объекты: Объекты больших размеров, такие как крупные суда, береговые линии, острова. Их изображение на экране радара повторяет форму объекта.
Радар позволяет морякам заранее обнаруживать и избегать столкновений с другими судами, подводными препятствиями и береговыми объектами. Он обеспечивает точное позиционирование судна в любой момент времени, особенно в условиях ограниченной видимости (туман, дождь, ночь). Кроме того, данные с радара используются автоматическими системами управления для поддержания заданного курса и скорости.
Полезная информация о цели получается за счет поступившей в приемник РЛС радиоволны, отразившейся от цели.
В зависимости от того, каким образом поступает в приемник РЛС радиоволна от цели, существует пассивная и активная радиолокация.
Активные РЛС
Принцип работы: РЛС излучает электромагнитные волны в пространство. Если волна встречает на своем пути объект, она отражается от него и возвращается к приемнику РЛС. По времени задержки отраженного сигнала и его характеристикам определяется расстояние до объекта, его скорость и другие параметры.
Преимущества:
- Высокая точность определения координат.
- Возможность обнаружения широкого спектра целей.
- Возможность работы в любых метеоусловиях.
Недостатки:
- Высокая заметность РЛС для средств радиоэлектронной борьбы противника.
- Ограниченная дальность действия из-за затухания радиоволн.
Пассивные РЛС
Принцип работы: Пассивная РЛС не излучает собственных сигналов, а принимает электромагнитные излучения, испускаемые самими объектами. Это могут быть радиосигналы, излучаемые радиолокационными станциями, радиостанциями, сотовыми телефонами и другими источниками.
Преимущества:
- Высокая скрытность работы.
- Возможность обнаружения объектов, не оснащенных активными средствами радиолокационного противодействия.
Недостатки:
- Низкая точность определения координат.
- Ограниченные возможности обнаружения малоразмерных и медленно движущихся целей.
- Зависимость от внешних источников излучения.
Для облегченного восприятия воспользуйтесь таблицей ниже:
| Сравнительная таблица активных и пасивных РСЛ | ||
|---|---|---|
| Характеристика | Активные РЛС | Пасивные РЛС |
| Принцип работы | Излучение и прием радиоволн | Прием излучения целей |
| Точность | Высокая | Низкая |
| Дальность действия | Большая | Ограниченная |
| Скрытность | Низкая | Высокая |
| Зависимость от внешних факторов | Низкая | Высокая |
В зависимости от структуры излучаемых (зондирующих) радиолокационных сигналов различают РЛС непрерывного излучения колебаний и импульсные. (На судах гражданского флота, в подавляющем большинстве, применяются импульсные НРЛС).
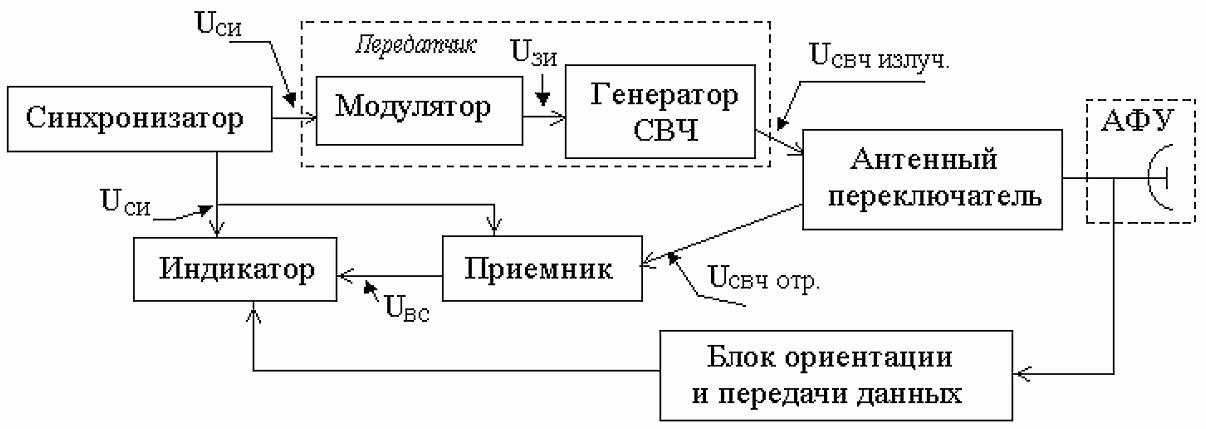
Импульсная НРЛС. Принцип ее построения
Импульсная НРЛС периодически излучает через антенный переключатель с помощью антенны кратковременные радиоимпульсы (как правило, сверхвысокочастотные колебания), а в промежутке между излучениями этих импульсов отраженные СВЧ колебания попадают на ту же антенну, затем через антенный переключатель – в приемник. Усиленные и обработанные специальным образом отраженные импульсы воспроизводятся на индикаторе.
Расстояние до цели D определяется уравнением
где:
- V – скорость распространения электромагнитных волн (СВЧ колебаний) в свободном пространстве;
- tp – время распространения кратковременных радиоимпульсов от антенны до цели и обратно от нее к антенне. (При расчетах V принимают равной скорости света c = 3 · 108 м/с, то есть приведенная выше формула обычно записывается как D = c · tp/2).
а направление на цель определяется угловым положением антенны (ее диаграммы направленности) относительно выбранного направления или плоскости.
Объяснение работы импульсной НРЛС на основе схемы и формул:
- Генерация и излучение импульсов: Генератор СВЧ колебаний создает короткие радиоимпульсы, которые модулируются и усиливаются. Затем, через антенный переключатель, они направляются на антенну и излучаются в пространство.
- Отражение сигнала от цели: Часть излученной энергии отражается от обнаруженного объекта (цели) и возвращается к антенне.
- Прием и обработка отраженного сигнала: Отраженный сигнал принимается той же антенной, усиливается в приемнике и обрабатывается.
- Определение дальности до цели: По времени, затраченному радиоимпульсом на путь от антенны к цели и обратно, рассчитывается расстояние до цели. Это время измеряется специальным устройством – синхронизатором.
- Определение направления на цель: По углу поворота антенны, при котором сигнал от цели имеет максимальную интенсивность, определяется направление на цель.
- Визуализация результатов: Обработанный сигнал отображается на индикаторе в виде ярких точек, соответствующих обнаруженным целям. Положение этих точек на экране индикатора соответствует их угловым координатам, а яркость точки связана с интенсивностью отраженного сигнала.
Преимущества импульсных НРЛС:
- Высокая точность измерения дальности.
- Возможность обнаружения различных типов целей.
- Высокая помехозащищенность.
Импульсные НРЛС широко применяются в различных областях, таких как авиация, судоходство, метеорология, военное дело и др.
Почему используют именно импульсный метод?
Импульсный метод позволяет точно измерять расстояние до цели и различать несколько целей, находящихся на разных расстояниях. Кроме того, он обеспечивает высокую помехозащищенность.
Виды ориентации
Каждая радиолокационная станция (РЛС) способна определять не только расстояние до объектов, но и их угловое положение. На судах, где широко используются навигационные радиолокационные станции (НРЛС), для указания направления на цель применяются два основных параметра:
- курсовой угол (КУ);
- и радиолокационный пеленг (РЛП).
Курсовой угол – это угол между линией курса судна и направлением на обнаруженный объект. Его значение отсчитывается от диаметральной плоскости судна и может варьироваться от 0 до 180 градусов как по левому, так и по правому борту. Иными словами, КУ показывает, под каким углом относительно своего движения судно видит тот или иной объект.
Навигационное оборудование, используемое в малотоннажном судостроенииРадиолокационный пеленг – это угол между направлением на север (по компасу) и направлением на объект. Он отсчитывается по часовой стрелке и может принимать значения от 0 до 360 градусов. Пеленг позволяет определить абсолютное направление на объект относительно географических направлений.
Определение этих углов на экране РЛС осуществляется с помощью специальных отметок и линий. Зная КУ и РЛП, судоводитель может точно определить положение своего судна относительно других объектов и Проверки перед маневрированиембезопасно маневрировать.
Таким образом, РЛС предоставляет судоводителю важную информацию о морской обстановке, позволяя ему принимать обоснованные решения в процессе навигации.
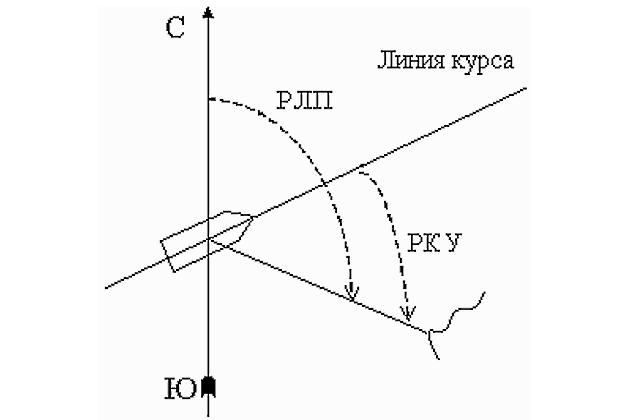
Данная схема наглядно демонстрирует, как определяются КУ и РЛП на экране РЛС. Линия курса судна показана прямой линией, а направление на объект – отрезком, образующим угол с этой линией. Угол между этими линиями и есть курсовой угол. Пеленг же определяется углом между направлением на север и направлением на объект.
Важно отметить, что для точного определения положения объектов необходимо использовать данные как с РЛС, так и с других навигационных приборов, таких как гирокомпас и GPS-навигатор.
| Преимущества каждого вида ориентации | ||
|---|---|---|
| Режим ориентации | Преимущества | Недостатки |
| Ориентация по курсу | Быстрая оценка относительного положения объектов по отношению к судну | Изображение может быть нестабильным при качке, затрудняя точное определение абсолютного положения объектов |
| Ориентация по северу | Стабильное изображение, точное определение абсолютного положения объектов | Может быть менее удобна для быстрого определения относительного положения объектов по отношению к судну |
| Курс стабилизированный | Сочетает преимущества первых двух режимов: стабильное изображение и возможность отслеживать изменение курса | При небольших изменениях курса линия курса может немного смещаться |
Выбор способа ориентации зависит от конкретных задач и условий плавания. Каждый способ имеет свои преимущества и недостатки. Режим “курс стабилизированный” часто считается наиболее универсальным, так как он позволяет получить наиболее полную и информативную картину. Современные РЛС обычно позволяют переключаться между различными режимами ориентации в зависимости от необходимости.
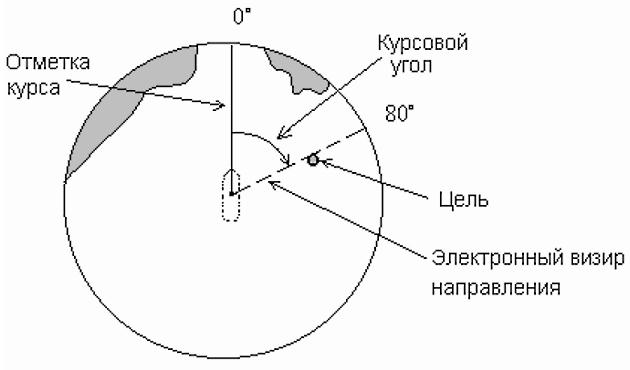
Что такое визир?
Визир – это устройство или точка отсчета, используемая для точного определения направления или положения объекта на море.
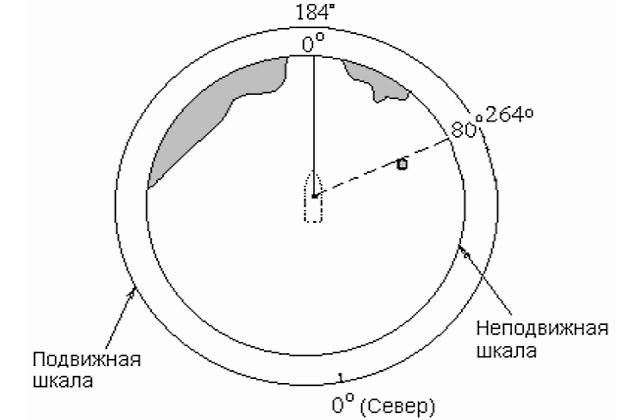
На рисунке 4 показан пример радиолокационного изображения при ориентации по курсу. Линия курса находится сверху и служит началом отсчета для курсовых углов. Визир, указывающий на цель, показывает, что цель находится на курсовом угле 80 градусов по правому борту.
Когда включена ориентация по северу, на экране РЛС появляется неподвижная шкала, которая указывает направления сторон света. Линия курса судна на этой шкале будет перемещаться в зависимости от того, как изменяется курс судна. Например, если судно повернет влево, то линия курса на экране сместится влево. Однако, направление на север всегда останется на своем месте.
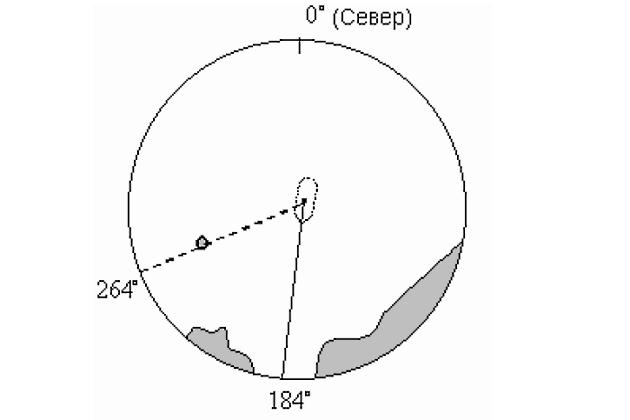
На рисунке 5 показан пример радиолокационного изображения при ориентации по северу. Линия курса судна показывает, что судно движется под углом 184 градуса. В то же время, визир, направленный на цель, показывает, что пеленг на эту цель составляет 264 градуса. При изменении курса судна линия курса будет перемещаться, а визир и шкала с направлениями сторон света останутся неподвижными.
Третий способ отображения информации на экране радиолокационной станции называется “курс стабилизированный“. Этот режим позволяет одновременно стабилизировать изображение относительно географического севера и относительно курса судна. То есть, направление на север всегда будет направлено вверх на экране, а изображение цели будет оставаться неподвижным, даже если судно немного изменит курс.
Читайте также: Обслуживание радионавигационного оборудования и ПК
Однако, линия, которая показывает текущий курс судна, может немного смещаться при небольших изменениях курса, например, при качке. В некоторых радиолокационных станциях направление на север обозначается подвижным маркером, который может немного перемещаться.
Этот режим позволяет получить более наглядное и информативное изображение на экране радиолокационной станции. Он особенно полезен при длительных переходах и в сложных навигационных условиях.
Индикация относительного и истинного движения
Радиолокационная станция предлагает два основных режима отображения:
- относительное (ОД);
- и истинное движение (ИД).
В режиме относительного движения судно кажется неподвижным, а все остальные объекты движутся вокруг него. Это удобно для быстрого ориентирования. В режиме истинного движения все объекты, включая судно, движутся относительно Земли, что позволяет точнее оценить ситуацию.
Выбор режима зависит от задачи: для быстрой оценки подходит относительный режим, для точного планирования – истинный. Каждый режим имеет свои особенности, и их выбор зависит от конкретной ситуации на море.
Эксплуатационные и технические характеристики НРЛС
Характеристики морских радиолокационных станций (НРЛС) определяют их возможности для решения различных задач навигации.
Эксплуатационные характеристики
К основным характеристикам НРЛС относятся:
- Дальность действия: Максимальная и минимальная дистанция, на которой станция может обнаружить цель.
- Точность: Точность определения координат цели по дальности и углу.
- Разрешающая способность: Способность различать близко расположенные цели.
- Производительность: Количество целей, которые станция может отслеживать одновременно.
- Время готовности: Время, необходимое для запуска станции.
- Защита от помех: Способность работать в условиях помех.
- Надежность: Способность работать в различных условиях.
По сути, эти характеристики определяют, насколько хорошо радиолокационная станция может обнаруживать, идентифицировать и отслеживать цели в различных условиях.
Основные технические параметры
Технические характеристики обеспечивают выполнение эксплуатационных параметров.
К основным из них относятся:
- λ – длина волны (обычно характеризуется в см);
- f – частота заполнения зондирующего импульса (СВЧ колебания – чаще всего выражается в МГц);
- τзи – длительность зондирующего импульса;
- Fп – частота следования зондирующих ипульсов;
- Tп – период повторения (следования) зондирующих импульсов;
- Pи – импульсная мощность передатчика;
- Pпр. min – чувствительность приемника;
- α, θ – направленность антенны соответственно горизонтальной и вертикальной плоскости (обычно измеряется в градусах);
- Ω – скорость вращения антенны.
Длина волны λ выбирается из соображений, чтобы НРЛС могла обеспечить:
- обнаружение как больших, так и малых надводных и наземных объектов в заданном радиусе действия НРЛС;
- работу НРЛС импульсами малой длительности;
- высокую направленность антенны в горизонтальной плоскости.
Эффективное отражение падающей энергии от объектов возможно только тогда, когда размеры объектов и радиусы кривизны отдельных его участков значительно больше длины волны передатчика НРЛС. В этом случае интенсивность отражения достигает заметной величины и определяется, главным образом, отражающими свойствами и размерами облучаемого объекта.
Исходя из размеров надводных объектов (буев, вех, шлюпок и др. объектов), для успешного их обнаружения используется коротковолновый участок УКВ диапазона (то есть СВЧ колебания – сантиметровый диапазон).
Что такое радиоимпульс и почему он должен быть определенной длительности?
Радиоимпульс – это короткий всплеск радиоволн, который посылается радиолокационной станцией. Длительность импульса связана с разрешающей способностью РЛС. Чем короче импульс, тем точнее можно определить расстояние до цели. Однако, слишком короткий импульс может иметь недостаточную энергию для обнаружения дальних целей.
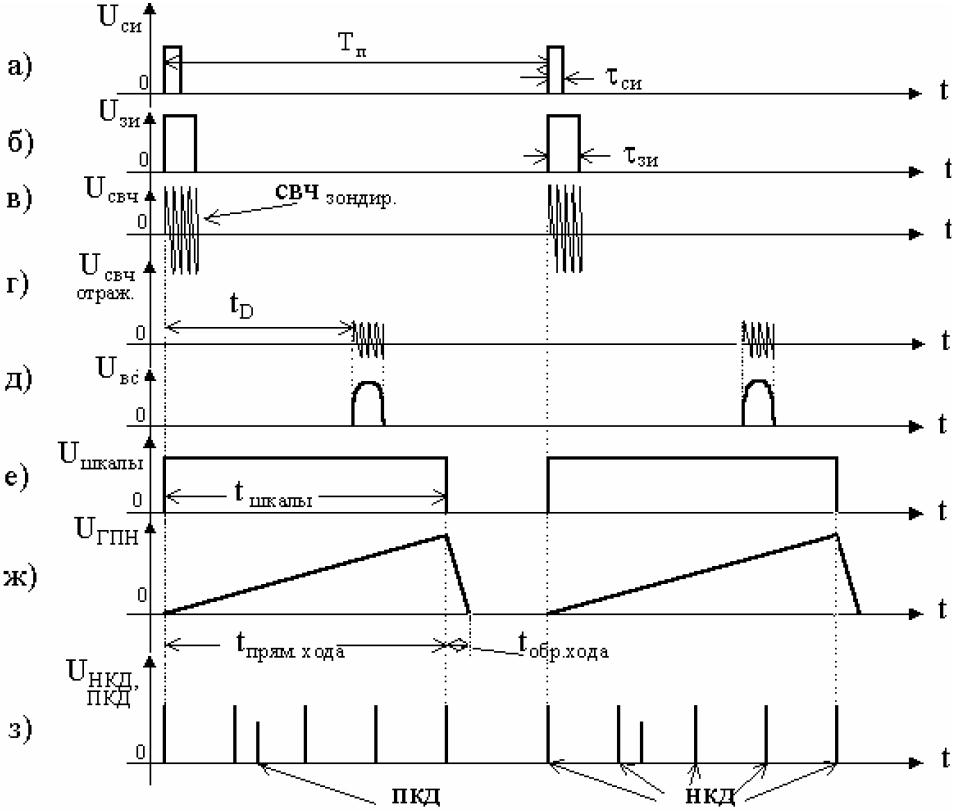
Для получения СВЧ радиоимпульса, с огибающей близкой к прямоугольной форме, каждый радиоимпульс должен содержать не менее и периодов колебаний (обычно несколько сотен – см. рис. 7).
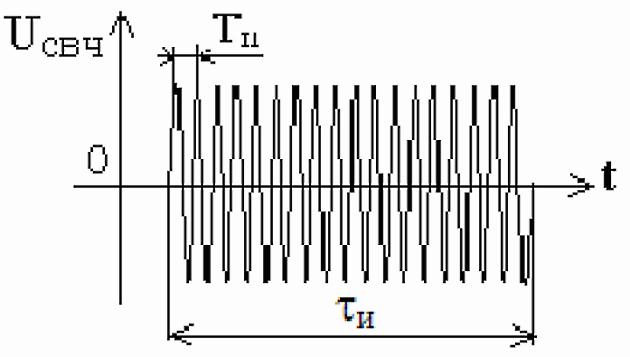
Из рис. 7 следует, что
Отсюда:
так как Tп = τи/n.
Тогда длина волны СВЧ радиоимпульса определится формулой:
Однако существуют определенные ограничения митнимальой длины волны, так как ее уменьшение приводит к уменьшению дальности действия НРЛС вследствие затухания СВЧ колебаний в атмосфере.
Зачастую в морских НРЛС применяю.тся две джлины волны:
- λ1 = 3,2 см (X – диапазон);
- λ2 = 9,8 см (S – диапазон).
Частота следования импульсов Fп выбирается из условия однозначного определения дальности до цели и эффективного обнаружения объектов при круговом обзоре.
В современных НРЛС Fп на малых шкалах порядка 3 000 имп/с, а на больших – 500 имп/с.
Мощность передатчика P оказывает влияние на дальность действия НРЛС. Различают импульсную Pи и среднюю Pср мощность передатчика.
Импульсная мощность – это мощность за время длительности зондирующего импульса.
Средняя мощность – это средняя мощность за период следования импульсов.
В НРЛС средняя мощность Pср измеряется единицами ватт, а импульсная мощность Pи – киловаттами (от 6 до 50 кВт).
Чувствительность приемника – является одним из важных факторов, определяющих дальность радиолокационного обнаружения и качество воспроизводимых сигналов НРЛС.
Что такое чувствительность?
Чувствительность – это способность радиолокационного приемника выделять полезные сигналы с заданной вероятностью на фоне (при наличии) помех.
В сантиметровом и миллиметровом диапазоне волн шумы создают, в основном, антенна и сам приемник.
Антенна – характеризуется шириной диаграммы направленности в горизонтальной и вертикальной плоскости, степенью подавления боковых лепестков, коэффициентом направленности, поляризацией излучаемой (принимаемой) электромагнитной волны, угловой скоростью вращения Ω.
Коэффициент направленности антенны – это число, которое показывает, во сколько раз созданная в заданном направлении мощность поля больше той, которая была бы при равномерном сферическом распределении.
Предлагается к прочтению: Радиостанции ПВ/КВ диапазона с ЦИВ и УБПЧ
Поляризация. Поляризация определяется плоскостью распространения составляющей (вектора)
электромагнитной волны. Существует вертикальная и горизонтальная поляризация.
Наибольшее распространение в НРЛС получили антенны с горизонтальной поляризацией.
Как правило, из-за свойств отражающей поверхности, поляризация отраженной волны не соответствует поляризации падающей волны и изменяется по случайному закону.
Указатели угловой скорости поворотаУгловая скорость вращения антенны Ω обычно составляет (16…24) об/мин, а для быстроходных судов – (30…48) об/мин.
Отражающие свойства объектов
При облучении радиоволнами объектов с отличными электрическими свойствами возникает вторичное излучение. Эффективная площадь рассеяния (ЭПР) характеризует способность объекта отражать радиоволны и зависит от его свойств и формы.
Что такое “Эффективная площадь рассеяния”?
Эффективная площадь рассеяния – это условная площадь, создающая такую же интенсивность отраженного сигнала, что и реальный объект.
Для определения ЭПО необходимо знать расстояние до цели, а также падающий и отраженный поток мощности. ЭПО относительно легко можно вычислить для объектов простых форм – металлического листа, шара, уголкового отражателя.
При этом допускается, что они выполнены из однородного идеально проводящего материала (то есть – не имеют потерь). ЭПО сложных объектов – судов, навигационных знаков и других целей определяется только экспериментально.
ЭПО простейшей формы
1 Пассивный полуволновый вибратор:
2 Плоский металлический лист, размеры которого значительно больше длины волны λ и он расположен перпендикулярно направлению распространения радиоволны:
Например, при S = 1 м2, λ = 3,2 см – Sэ = 12 265 м2, а при λ = 8 мм – Sэ = 196 250 м2.
При отклонении угла облучения от нормали ЭПО резко уменьшается. В этом случае она определяется уравнением вида:
где:
- a – сторона облучаемой плоскости;
- α – угол облучения.
3 Уголковый отражатель со стороной a (см. рис. 8).
Для увеличения интенсивности отражения малоразмерных объектов (например – буев, вех и др.) в достаточно большом секторе облучения применяются искусственные уголковые отражатели.
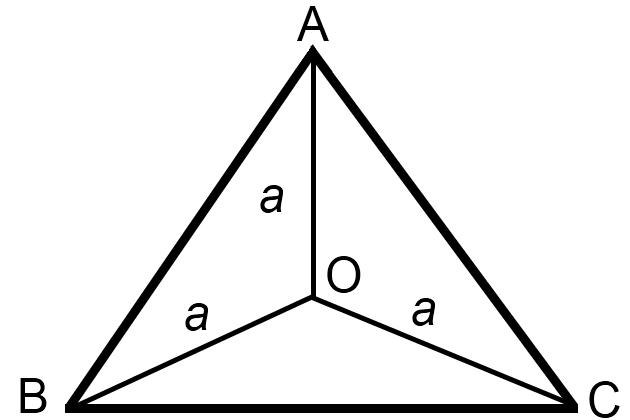
ЭПО уголкового отражателя, у которого ΔAOB ⊥ ΔBOC ⊥ ΔAOC, приблизительно равна площади мнимого шестиугольника, вписанного во внешний контур отражателя, определяется уравнением:
Тогда, согласно формуле
, ЭПО уголкового отражателя будет равна:
Например, при a = 0,4 м и λ = 3,2 см – Sэ = 104,7 м2. Если необходимо усилить интенсивность отражения во всех направлениях, то уголковые отражатели устанавливают группами (по окружности).
На рис. 9 изображен пятиугольный комплект отражателей, смонтированных на буе.
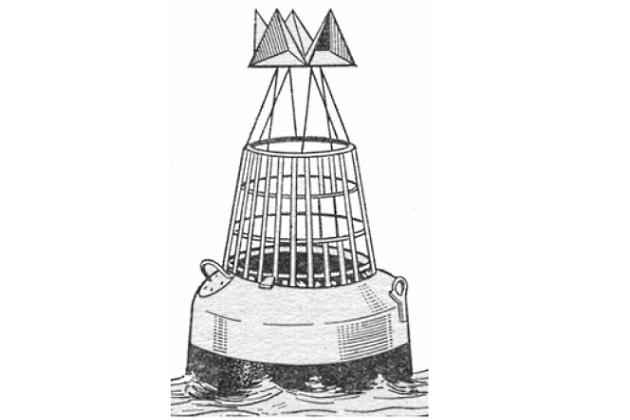
Существенное значение имеет точность выполнения и жесткость конструкции уголковых отражателей.
4 Шар радиусом R.
- При R ≫ λ уравнение: Sэ = R2.
- При R ≪ λ, что характерно для капель дождя, тумана и других целей, ЭПО определяется уравнением:
ЭПО групповых объектов
Групповыми называются такие объекты, которые находятся и облучаются в пределах разрешающей площадки.
В этом случае принимаемые отраженные сигналы представляют собой совокупность нескольких отраженных сигналов, отличающихся друг от друга по фазе и амплитуде, при этом их фазы и амплитуды могут между собой суммироваться или вычитаться.
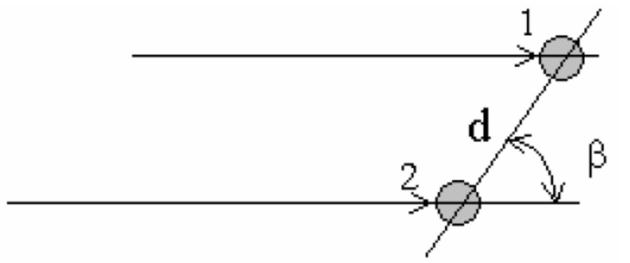
Например, при облучении двух целей, изображенных на рис. 10, ЭПО определяется уравнением:
где:
- Sэ1 – ЭПО одного объекта.
Отсюда следует важный вывод – при изменении взаимного положения первой и второй цели, могут изменяться β и d и тогда Sэ может изменяться от нуля до четырехкратного значения Sэ1.
ЭПО судов
Радарный сигнал, отражаясь от судна, создает уникальный “отпечаток“. Сила отраженного сигнала меняется в зависимости от того, как судно повернуто относительно радара. Это явление похоже на то, как свет от фонарика отражается от разноцветного стеклянного шара. Для визуализации этого используют специальные схемы.
Например, на рисунке 10 показана такая картинка для специальных устройств, которые крепятся на судно и усиливают отраженный сигнал (рис. 9).
В качестве примера, на рис. 11 показана ЭПО в полярной системе координат танкера водоизмещением 10 000 т при разных ракурсах облучения.
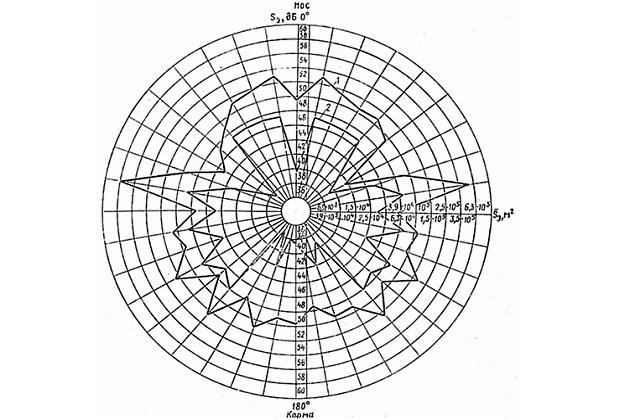
Диаграмма снималась в натуральных условиях, при спокойной поверхности моря, на расстоянии 7 миль, волнах λ1 = 8 мм (кривая 1) и λ2 = 3,2 см (кривая 2).
В таблице ниже приведены ориентировочные данные среднего значения эффективной поверхности отражения (рассеяния) для некоторых типов судов, знаков навигационного ограждения и других объектов в диапазоне сантиметровых волн, а также ориентировочные данные высоты объектов. Пользуясь приведенными данными, можно вычислить средние значения дальности радиолокационного наблюдения соответствующих целей или объектов.
| Средние значения эффективной поверхности отражения объектов в диапазоне сантиметровых волн | ||
|---|---|---|
| Тип объекта | Sэ, м2 | h, м |
| Катер | 75 – 250 | 2 – 4 |
| Буксир | 250 – 750 | 4 – 6 |
| Траулер | 750 – 4 · 103 | 6 – 8 |
| Судно малого тоннажа | 4 · 103 – 12 · 103 | 8 – 10 |
| Судно среднего тоннажа | 12 · 103 – 3 · 104 | 10 – 14 |
| Судно большого тоннажа | 3 · 104 – 5 · 104 | 14 – 20 |
| Буй без отражателя | 1 – 10 | 1 – 2 |
| Человек | 0,8 | |
ЭПО распределенных объектов
Распределенными называются объекты, размеры которых превышают линейные размеры радиолокационного луча на местности.
Делятся на:
- поверхностные,
- и объемные.
Поверхностные – это участки водной поверхности, суши.
Отражение от поверхностных объектов (целей) может быть зеркальным и рассеянным.
Условием зеркальной поверхности является выполнение соотношения:
В этом случае отражение практически подчиняется оптическим законам, то есть угол падения β равен углу отражения. Поэтому отраженная радиоволна, как правило, на антенну НРЛС не возвращается (за исключением нормально падающей радиоволны).
При зеркальном отражении СВЧ энергия в приемник НРЛС не поступает.
Если же
– это шероховатая поверхность, создающая так называемое рассеянное отражение. При рассеянном отражении радиоволны распространяются в разные направления, и часть отраженной энергии поступает в приемник НРЛС.
На дальних расстояниях (то есть угол β минимален) правая часть уравнения
увеличивается, а h уменьшается. Таким образом, на больших расстояниях волнение от моря сказывается не существенно, в то время как на малых расстояниях (0 ÷ 6) миль – волнение сказывается существенно.
ЭПО водной поверхности. Зависит от разрешающей площадки НРЛС и коэффициента направленности отражающей поверхности в направлении антенны НРЛС.
Определяется уравнением:
где:
- Sp – разрешающая площадка НРЛС;
- G – коэффициент направленности отражающей поверхности в направлении антенны НРЛС. Его величина зависит от степени волнения (высоты и направления волны) и может изменяться от 0 до 1.
Для уменьшения помех от волн используют РЛС с более точным разрешением:
- короткоимпульсные сигналы;
- и узконаправленные антенны.
Объемные объекты (дождь, град и т. п.) состоят из множества мелких частиц, которые радар воспринимает как единое целое. Их радиолокационная заметность зависит от количества частиц и их способности отражать радиоволны.
ЭПО объемной цели определяется уравнением:
где:
- Sк – ЭПР одной элементарной цели (например – дождевой капли);
- N – количество элементарных целей в разрешающем объеме;
- Vр – общий объем, в котором все элементарные цели воспринимаются как один объект.
Тогда ЭПО объемной цели равняется:
Если, например, в зоне дождя находится какой-либо объект, например судно, то отражение от дождевых капель может создать значительную помеху на экране индикатора для распознания отраженного от судна сигнала. Эту помеху можно несколько снизить укорочением длительности импульсов РЛС и использованием антенны с большей направленностью (меньшим углом αг). При этом мощность сигнала от судна практически не снизится, а мощность помех из-за отражения от дождевых капель уменьшится.
Помехи от дождевых капель можно также значительно уменьшить, применяя для облучения объектов электромагнитное поле с круговой поляризацией.
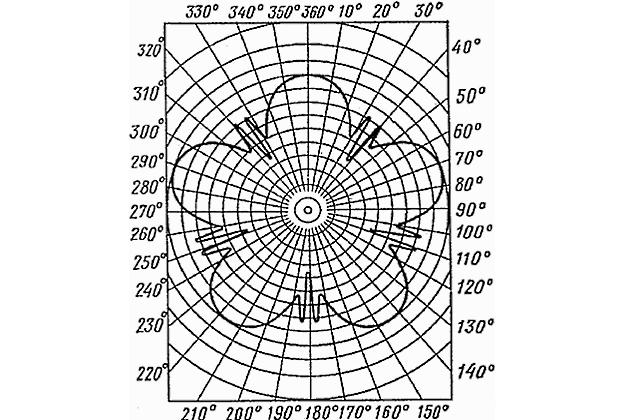
На практике поле с круговой поляризацией получают с помощью специальной поляризационной решетки из четвертьволновых металлических пластин, расположенных под углом 45° к вектору электрической составляющей поля падающей линейнополяризованной волны (рис. 12).
Такая решетка размещается обычно в раскрыве рупорной антенны.
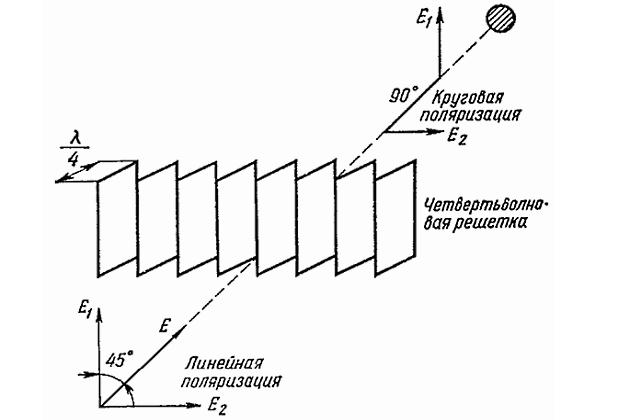
Поляризационная решетка преобразует линейную поляризацию радиоволн в круговую. При отражении от сферических объектов (дождь) поляризация компенсируется, а от несимметричных (суда) – нет. Это позволяет подавить помехи от осадков до 25 дБ.
Дальность действия НРЛС в свободном пространстве
Дальность действия НРЛС в свободном пространстве определяется максимальным расстоянием между НРЛС и объектом, который должна обнаружить НРЛС.
Под дальностью действия НРЛС в свободном пространстве подразумевается дальность, зависящая от технических характеристик НЛРС и от отражающих свойств облучаемого объекта. (Влияние атмосферы, формы Земли и подстилающей поверхности, при этом, не учитываются).
Максимальную дальность НРЛС Dmax определяется таким образом:
Если бы антенна была ненаправленной, то есть представляла собой изотропный излучатель, то она создавала бы при импульсном излучении мощностью Pи плотность потока мощности на поверхности сферы у объекта
где:
- Pи – импульсная мощность передатчика;
- 4πD2 – площадь поверхности сферы радиусом D.
Но, так как реальная антенна характеризуется коэффициентом направленного действия
где:
- Sа – площадь раскрыва антенны,
то, благодаря коэффициенту направленности, на объект воздействует плотность потока мощности
Под воздействием этого (падающего) потока мощности объект переизлучает (так как на его поверхности возникают СВЧ токи) в пространство мощность, определяемая уравнением:
где:
- Sэ – ффективная поверхность отражения цели.
Эта мощность создает в окружающем пространстве, то есть – и на раскрыве (поверхности) антенны НРЛС плотность потока мощности, равную:
В свою очередь, учитывая, что антенна обладает определенным коэффициентом усиления G, то есть
то на вход приемника (под воздействием плотности потока мощности П2) воздействует мощность
Подставив в полученное уравнение уравнение выше, получим:
А с учетом потерь в антенно-волноводном тракте НРЛС, характеризующихся η1 – КПД передающего тракта и η2 – КПД приемного тракта (обычно η1 ≈ η2 ≈ 0,8…0,9) получим:
При условии, что приемник обладает максимальной чувствительностью, то есть Pпр. = Pпр. min, из уравнения находим, что Dmax равно:
Уравнение называют еще уравнением дальности НРЛС в свободном пространстве. Из него видно, что Dmax зависит от импульсной мощности передатчика, чувствительности приемника, длины волны, КПД НРЛС, а также зависит от ЭПО объекта.
Влияние отражений от подстилающей поверхности (водной, земной) на дальность действия НРЛС
Сигнал радара, отражаясь от цели, может также отразиться от воды. Это создает помехи, особенно для низколетящих целей. Фаза отраженного сигнала влияет на качество приема. Оптимальная высота цели зависит от длины волны и высоты антенны радара.
Читайте также: Судовые РЛС
Увеличение мощности не всегда решает проблему. Для улучшения обнаружения низколетящих целей необходимо уменьшать длину волны и увеличивать высоту антенны, но это ограничено техническими возможностями.
Влияние сферичности Земли на дальность действия НРЛС
Радиоволны сантиметрового диапазона распространяются практически прямолинейно, слабо огибая препятствия. Их дальность зависит от высоты антенн и учитывает кривизну Земли и влияние атмосферы. Чем выше антенны, тем дальше они “видят“. Эта информация важна для размещения радиолокационных станций.
Влияние атмосферы на дальность действия НРЛС
Атмосфера может существенно влиять на то, как распространяются радиоволны. Она может заставлять их отклоняться от прямого пути, а также поглощать часть их энергии.
Субрефракция и сверхрефракция
Два основных явления, которые описывают, как атмосфера влияет на радиоволны, – это субрефракция и сверхрефракция. Они зависят от того, как меняется плотность воздуха с высотой.
- Субрефракция: При субрефракции радиоволны изгибаются вверх. Это происходит, когда более холодный воздух находится над более теплым. Такая ситуация часто наблюдается в высоких широтах. Субрефракция приводит к уменьшению дальности обнаружения целей радаром.
- Сверхрефракция: При сверхрефракции радиоволны изгибаются вниз. Это происходит, когда более теплый воздух находится над более холодным. Такая ситуация часто наблюдается над морем после прохождения теплого воздуха над сушей. Сверхрефракция, наоборот, увеличивает дальность обнаружения целей радаром.
В некоторых случаях, при очень сильной сверхрефракции, радиоволны могут распространяться вдоль поверхности Земли на очень большие расстояния. Это явление называется поверхностным волноводом. Оно может привести к появлению на экране радара ложных целей или к тому, что реальные цели будут отображаться на гораздо большем расстоянии, чем они есть на самом деле.
Влияние осадков на распространение радиоволн
Дождь, снег и туман также могут влиять на распространение радиоволн. Капельки воды поглощают часть энергии радиоволн и рассеивают их в разные стороны. Это приводит к ослаблению сигнала и уменьшению дальности обнаружения.

- Байрашевский А. М., Ничипоренко Н. Т. Судовые радиолокационные системы: Учебник для морских вузов. – 2-е изд., перераб. и доп. – М.: Транспорт, 1982. – 317 с.
- Морская радиолокация/ Под ред. В. И. Винокурова. – Л.: Судостроение, 1986. – 256 с.
- Радионавигационные приборы и системы/ В. А. Василенко, Б. С. Розен, В. В. Серегин. – М.: Агропромиздат, 1986. – 319 с.
- Справочник по основам радиолокационной техники. Под ред. В. В. Дружинина. – М.: Военное изд., 1967. – 768 с.
- Справочник по радиолокации. Под ред. М. Сколника. Нью-Йорк, 1970. Пер. с англ. (в четырех томах) под общей ред. К. Н. Трофимова. Том 1. Основы радиолокации. Под ред. Я. С. Ицхоки. М.: «Сов. радио», 1976. – 456 с.
- Справочник по радиолокации. Под ред. М. Сколника. Нью-Йорк, 1970. Пер. с англ. (в четырех томах) под общей ред. К. Н. Трофимова. Том 2. Радиолокационные антенные устройства. Под ред. П. И. Дудника. М.: «Сов. радио»,1977. – 408 с.
- Волынец В. Ф. РЛС «Океан». М.: Транспорт, 1974. – 200 с.
- Радиотехнические системы: Учебник для вузов по спец. «Радиотехника»/ Ю. П. Гришин, В. П. Ипатов, Ю. М. Казаринов и др.; Под. ред. Ю. М. Казаринова. – М.: Высш. шк., 1990. – 496 с.
- Радиотехника и радионавигационные приборы. Айзинов М. М., Байрашевский А. М. – Изд. 2-е, перераб. и доп. М.: Транспорт, 1975. – 432 с.
- Финкельштейн М. И. Основы радиолокации: Учебник для вузов. – 2-е изд., перераб. и доп. – М.: Радио и связь, 1983. – 536 с.
- Справочник по судовому оборудованию радиосвязи и радионавигации. Т.II. Оборудование радионавигации/ А. М. Байрашевский, Ю. Е. Горностаев, А. В. Жерлаков и др. – Л.: Судостроение, 1979. – 232 с.
- Судовые радиолокационные станции: Атлас / А. М. Байрашевский, Волынец В. Ф., О. В. Кононов и др.- 2-е изд., перераб. и доп. М.: Транспорт, 1986. – 144 с.
- Москвин Г. И., Суровец Л. А. Доплеровская радиолокационная станция “Истра”. Экспресс-информация. Сер. Судовождение и связь, вып. 5 (90), М., ЦБНТИ ММФ, 1976. – 36 с.
- Соненберг Г. Д. Радиолокационные и навигационные системы: Пер. с англ. – Л.: Судостроение, 1982. – 400 с.
- Рекомендации для судоводителей по практическому использованию судовой автоматизированной РЛС “Океан-С”: Методические рекомендации. – М.: В/О “Мортехинформреклама”, 1986. 56 с.
- Radar ATLAS 8600 ARPA. Инструкция по обслуживанию. Krupp Atlas Elektronik GMBH, 1989.
- Судовые средства автоматизации предупреждения столкновений судов / Ю. Г. Зурабов, Р. Н. Черняев, Е. В. Якшевич, В. Я. Яловенко. – М. : Транспорт, 1985. – 264 с.
- Вагущенко Л. Л. Интегрированные системы ходового мостика: Учеб. пособ. / ОНМА. – Одесса. Латстар, 2003. – 170 с.
- Каратаев О. Г. Проблемы электромагнитной совместимости. (сер. «Радиоэлектроника и связь»; №5) – М.: Знание, 1988. – 64 с.
- Дьяконов В. Mathcad 8/2000: специальный справочник – СПб.: Издательство «Питер», 2000. – 592 с.
- Судовые радионавигационные приборы: Учебник для мореходных училищ/ В. В. Коновалов, Л. И. Кузнецова, Н. П. Мельников, О. Б. Причкин. – 5-е изд., перераб. и доп. – М.: Транспорт, 1989. – 223 с.
- Демиденко П. П. Судовые навигационные радиолокационные станции. – Учебн. пособие. Одесса, 2004. – 163 с.
- Использование НРЛС и САРП на морских судах. П. П. Демиденко. Мортехинформреклама. Морской транспорт. Серия «Судовождение, связь и безопасность мореплавания». Экспресс-информация, вып. 8 (363), 1999, с. 14-24.





