Авторулевой “Аист” является типичным представителем авторулевых класса PID-регуляторов.
Комплект приборов и основные технические данные
Авторулевой “Аист” предназначен для установки на судах, имеющих электрогидравлические рулевые машины. Авторулевой подключается к репитерной передаче гирокомпаса или дистанционного магнитного компаса.
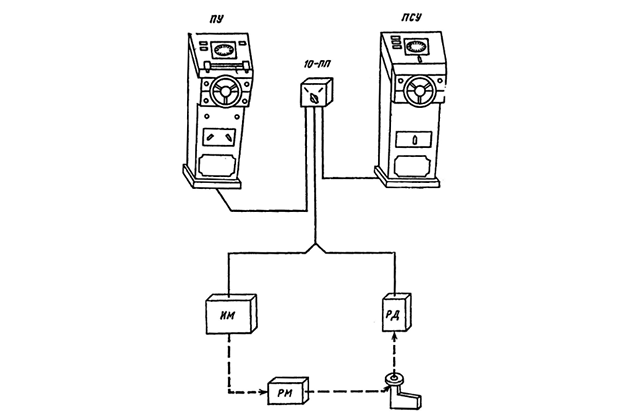
В комплект авторулевого “Аист” входят следующие приборы (рис. 1):
- пульт управления (ПУ);
- пульт следящего управления (ПСУ);
- переключатель пультов (10-ПП);
- исполнительный механизм (ИМ-1 или ИМ-2);
- рулевой датчик (РД).
В комплект также входит набор запасных частей и приспособлений (ЗИП) и инструменты.
Пульт управления (ПУ) является основным прибором авторулевого, в котором размещены электромеханические элементы, силовые трансформаторы, усилители и другие устройства, предназначенные для выработки сигналов управления. На лицевых панелях ПУ расположены основные органы управления. Прибор ПУ устанавливается в ходовой рубке. Он обеспечивает работу авторулевого в одном из трех видов управления: автоматическом, следящем, простом.
Пульт следящего управления (ПСУ) предназначен для управления судном только в двух режимах: следящем или простом. Прибор ПСУ устанавливается в ходовой рубке (при отсутствии в комплекте прибора ПУ) или на верхнем мостике. По своей конструкции ПСУ аналогичен прибору ПУ, но в нем отсутствуют те элементы, которые предназначены для автоматического вида управления.
Переключатель пультов (10-ПП) обеспечивает переключение электрических цепей, если в комплектации авторулевого имеются два или более пульта управления (ПУ или ПСУ). Количество положений переключателя зависит от числа пультов.
Исполнительный механизм (ИМ) служит для управления электрогидравлической рулевой машиной (РМ). В зависимости от типа насоса рулевой машины применяется исполнительный механизм ИМ-1 или ИМ-2. Прибор ИМ устанавливается в румпельном отделении на корпусе насоса.
Рулевой датчик (РД) содержит электромеханические элементы для выработки сигнала обратной связи в схеме авторулевого. Прибор РД устанавливается в румпельном отделении и имеет непосредственную механическую связь с баллером руля.
Помимо рассмотренных приборов, в комплект авторулевого “Аист” могут дополнительно входить: соединительный ящик (СЯ-42), предназначенный для разветвления электрических цепей, и станция электроэлементов (СЭ), которая содержит ряд устройств, обеспечивающих работу схемы.
Авторулевой “Аист” характеризуется следующими техническими данными.
- При наличии в комплекте прибора ПУ возможны четыре вида управления: автоматический, следящий, простой и ручной. Автоматический вариант управления обеспечивается сигналом от гирокомпаса или дистанционного магнитного компаса. В этом случае судно удерживается на заданном курсе без участия человека. В следящем режиме курсоуказатель отключается от схемы авторулевого и судно управляется человеком с помощью штурвала. При переходе на простой (резервный) вид управления схемы авторулевого не используются. Управление рулем производится с помощью двух клавишей, обеспечивающих включение исполнительного механизма рулевой машины. Ручной вид управления является аварийным. Он применятся в случае отказа всей схемы авторулевого. Управление рулем производится вручную при помощи рукоятки, находящейся непосредственно на ИМ.
- Средняя величина рыскания в автоматическом режиме (при оптимальных положениях регуляторов) равна примерно 1° при волнении моря до 3 баллов и не превышает 3° при волнении в 5 баллов. Когда волна выше 5 баллов, авторулевой обеспечивает надежное удержание судна на курсе, но величина рыскания при этом будет более 3°.
- При любом виде управления максимальный угол перекладки руля не превышает 35°. Это обеспечивается электрическими ограничителями.
- Надежная работа электрической схемы авторулевого предусматривает, чтобы сопротивление изоляции было не менее 1 МОм.
Принцип действия авторулевого
Авторулевой не является самостоятельным прибором; он обязательно подключается к гирокомпасу или дистанционному магнитному компасу.
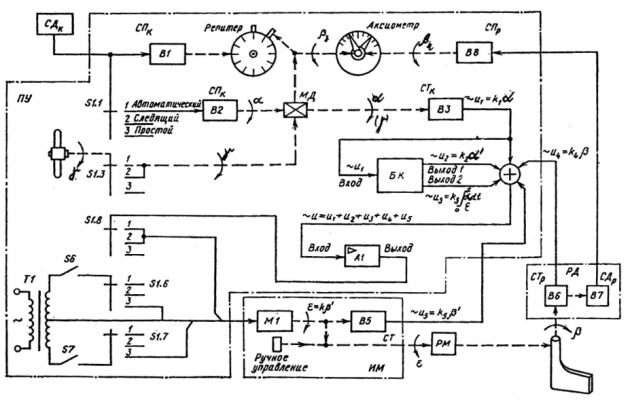
На рис. 2 показана блок-схема авторулевого, поясняющая принцип его действия.
В ПУ имеется переключатель S1.1, с помощью которого можно установить один из трех видов управления:
- автоматический;
- следящий;
- простой.
В автоматическом режиме вырабатывается пять сигналов, обеспечивающих удержание судна на заданном курсеДвижение судна постоянным курсом при изменении режимов работы движителей. В этом режиме схема авторулевого имеет связь с гирокомпасом или дистанционным магнитным компасом. Находясь под влиянием внешних возмущений (ветер, волна и т. п.), судно отклоняется от заданного курса. Задача авторулевого заключается в том, чтобы выработать сигнал, передать его на рулевое устройство судна и обеспечить удержание судна на заданном курсе. При уходе судна с курса на угол а сельсин-преемник В2 передает вращение на сельсин-трансформатор В3, на выходе которого формируется основной управляющий сигнал U1 = K1α, пропорциональный углу отклонения судна от курса. Два других управляющих сигнала вырабатываются в блоке коррекции (БК). Эти сигналы образуются на основе сигнала посредством дифференцирования U2 = K2α и интегрирования:
Сумма сигналов U1+U2+U3 подается на вход усилителя. Усиленный суммарный сигнал через переключатель поступает на двигатель М1 исполнительного механизма. Двигатель М1 устанавливает определенное положение золотников рулевой машины (РМ) и обеспечивает перекладку руля на угол р. В зависимости от типа РМ, в комплект авторулевого может входить исполнительный механизм ИМ-1 или ИМ-2. В приборе ИМ-1 выходной валик имеет вращательное движение на некоторый угол E, а в приборе ИМ-2 выходной валик совершает поступательное перемещение на некоторую величину 1.
Величина E(l) определяет скорость перекладки руля, т. е. E = Кβ. С сельсина-трансформатора В5, механически связанного с двигателем М1, снимается сигнал обратной связи U5 = K5 в, который служит для уменьшения автоколебаний пера руля.
Сельсин-трансформатор В6, механически связанный с рулем, вырабатывает сигнал обратной связи U4 = K4p. Этот сигнал ограничивает угол перекладки руля и вместе с сигналом U1 обеспечивает удержание судна на заданном курсе (по закону незатухающих колебаний). Для погашения колебаний судна относительно линии заданного курса, т. е. для сдерживания судна, служит сигнал U2 = K2α.
Все пять сигналов суммируются, причем сигналы U1 и U4 всегда в противофазе.
Перекладка руля производится до тех пор, пока двигатель М1 не возвратится в исходное положение.
Для того чтобы задать новый курс в автоматическом режиме, необходимо поворотом штурвала (угол γ) передать вращение через механический дифференциал (МД) на подвижный индекс репитера и ротор сельсина-трансформатора В3.
В следящем режиме (положение 2 контактов переключателя S1.1) гирокомпасГирокомпас «Стандарт-14» от схемы авторулевого отключается. Основной сигнал U1 вырабатывается сельсином-трансформатором В3 за счет поворота штурвала вручную на угол y (U1 = K1γ). Сигналы U3 и U3 блоком коррекции не вырабатываются, так как в следящем режиме питание этого блока отключено. Сигналы U4 и U5 формируются так же, как в автоматическом режиме.
В простом режиме сигналы U1…U5 не вырабатываются. Питание на двигатель М1 подается от трансформатора Т1 через кнопки S6, S7 и контакты переключателя
S1.6, S1.7. В качестве запасного (аварийного) предусмотрено ручное управление золотниками рулевой машины (при обесточенном двигателе М1).
Сельсин-приемник В1 обеспечивает работу репитера курса, а сельсины В7 и В8 – работу аксиометра.
Конструкция авторулевого
Пульт управления
В комплект авторулевого “Аист” входит два пульта: ПУ и ПСУ.
- ПУ – пульт управления, обеспечивающий три вида работы: автоматический, следящий и простой.
- ПСУ – пульт следящего управления, с которого можно задавать два вида работы: следящий и простой.
Кроме этих пультов, на судне может устанавливаться пульт простого управления (ППУ), с помощью которого управление судном производится нажатием клавиш.
Внешний вид ПУ показан на рис. 3. На верхней крышке ПУ расположены:
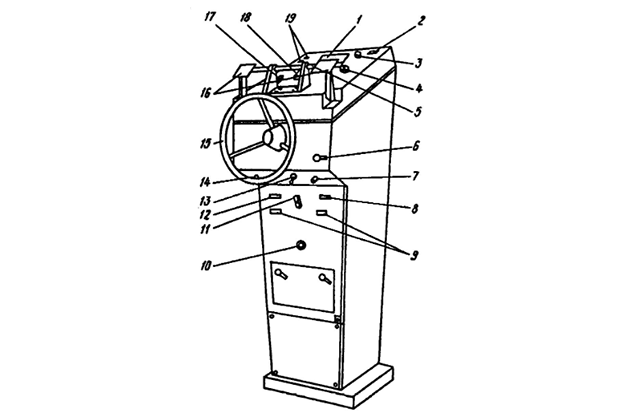
- 1 – застекленное окно, через которое видны шкалы репитера гирокомпаса и
- аксиометра;
- 2 – гнездо устройства согласования репитера с показаниями гирокомпаса;
- 18 – рукоятка переключателя видов управления;
- 4 – рукоятка для установки коэффициента обратной связи Kос.;
- 17 – рукоятка потенциометра, регулирующего величину сигнала производной;
- 2, 19 – световые табло, сигнализирующие о режиме работы авторулевого. В
- зависимости от вида управления на световом табло загорается надпись “АВТОМАТ”, “СЛЕДЯЩИЙ” или “ПРОСТОЙ”;
- 5 – поручень;
- 16 – клавиши простого вида управления.
- 15 – штурвал;
- 6 – рукоятка механического стопора, с помощью которого штурвал может быть
- зафиксирован в любом положении;
- 7, 1 4 – рукоятки потенциометров в цепи питания ламп подсветки шкал и световых
- табло;
- 13 – переключатель чувствительности, имеющий два положения “Грубо” и
- “Точно”.
В верхней части передней панели пульта управления расположены:
В средней части лицевой панели ПУ находятся:
- 9 – рукоятки переключателя запуска электродвигателей насосов гидравлической
- рулевой машины;
- 8, 1 2 – лампы, сигнализирующие о работе насосов. Если в комплект авторулевого
- входит только один ИМ, то в этом случае одна из рукояток обеспечивает переключение усилителей;
- 11 – рукоятка переключателя устройства для сигнализации об уходе судна с заданного курса;
- 10 – кнопка для отключения звукового сигнала.
На рис. 4 представлен прибор ПУ с открытыми крышками.
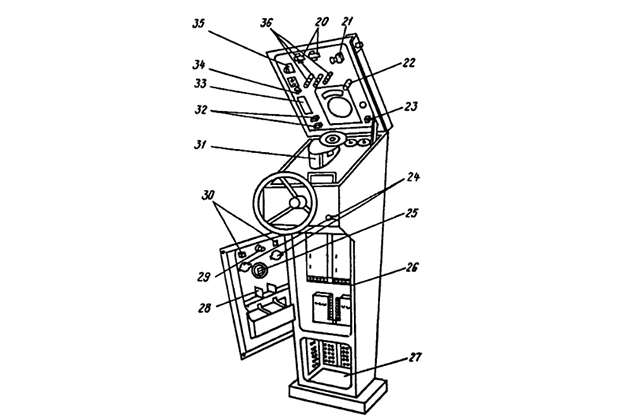
Внутренний объем ПУ разделен на три отсека:
- 31 – верхний отсек, где размещены все электромеханические элементы и трансформаторы.
В среднем отсеке расположены два усилителя А1 и два БК.
- 27 – нижний отсек, где находятся клеммные платы.
На внутренней стороне верхней крышки расположены:
- 20 – два трансформатора в цепи формирования Кос.;
- 36 – переключатель видов управления, состоящий из трех отдельных частей, которые кинематически связаны между собой;
- 33 – плата с резисторами;
- 22 – переключатель в цепи установки Кос.;
- 34 – потенциометр для регулировки величины сигнала производной;
- 21, 35 – выключатели в цепи управления рулевой машиной при работе в простом режиме, управляемые клавишами 16 (см. рис. 3);
- 23, 32 – сигнальные лампыМорская сигнализация и связь, которые служат для подсветки табло видов управления.
На внутренней стороне средней крышки находятся:
- 24 – переключатели, обеспечивающие включение насосов гидравлической рулевой машины;
- 29 – переключатель в цепи сигнализации об уходе судна с курса;
- 25 – ревун, который подает звуковой сигнал при уходе судна с курса на угол больше заданного, а также при перегрузке насосов рулевой машины;
- 30 – лампы, сигнализирующие о работе насосов;
- 28 – кнопка для включения ревуна.
В верхнем отсеке 31 размещены следующие элементы авторулевого:
- сельсин-приемник курса В1 (см. рис. 2);
- сельсин-приемник курса В2 (см. рис. 2);
- сельсин-трансформатор В3;
- сельсин-приемник В8 истинного положения пера руля;
- контактное устройство S4 в цепи включения сигнализации об уходе судна с заданного курса на угол больше заданного;
- контактное устройство S5 в цепи сброса интегратора в нулевое положение при изменении заданного курса более чем на 10°;
- бленкер, сигнализирующий о подаче питания в схему рулевых указателей;
- лампы подсветки шкал;
- клеммные платы.
Исполнительный механизм и рулевой датчик
ИМ устанавливается на насосе рулевой машины и предназначен для управления золотником рулевой машины. В зависимости от типа рулевой машины в комплект авторулевого может входить ИМ-1 или ИМ-2, отличающиеся друг от друга тем, что в ИМ-1 выходной валик имеет вращательное движение, а в приборе ИМ-2 он совершает поступательное движение. На рис. 5 и 6 показан прибор ИМ-1 с закрытой и открытой крышкой.
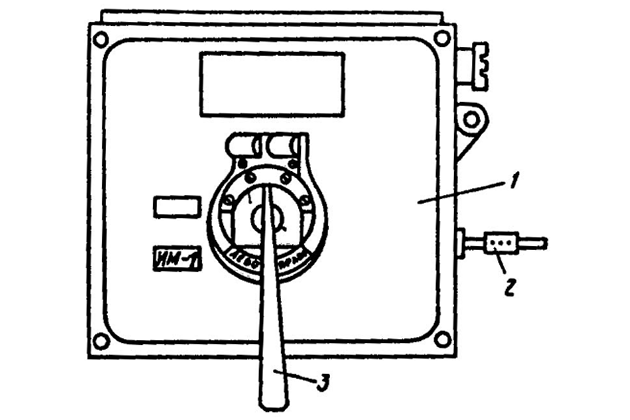
Прибор состоит из корпуса и крышки. На крышке 1 имеется рукоятка 3, предназначенная для ручного (местного) управления рулевой машиной. Выходным элементом прибора ИМ-1 является валик 2, который может поворачиваться в пределах ± 30.
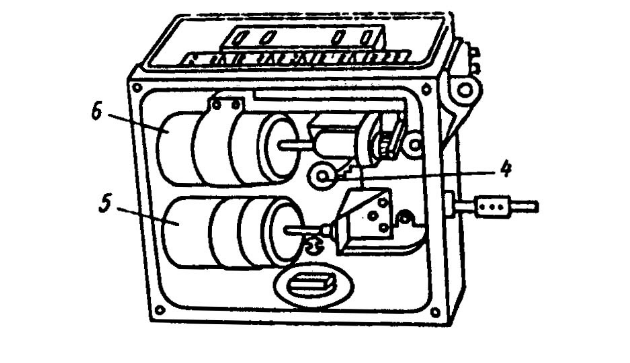
Внутри прибора (рис. 6) находятся:
- 6 – электродвигатель типа АДП;
- 5 – сельсин-трансформатор, с которого снимается сигнал, пропорциональный скорости перекладки руля;
- 4 – рулевой установитель, обеспечивающий возвращение валика в исходное положение.
Рулевой датчик РД конструктивно выполнен герметично. Он устанавливается в румпельном отделении и механически связан с баллером руля.
Предлагается к прочтению: Регулировочные работы, швартовные и ходовые испытания
Общий вид РД с открытой крышкой представлен на рис. 7.
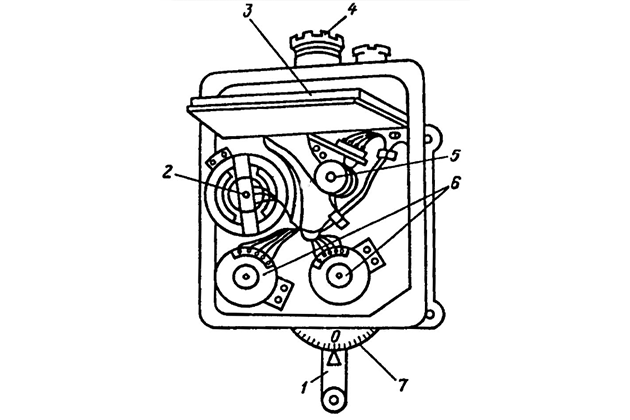
В нижней части корпуса расположен валик 1 с рычагом, который кинематически связан с баллером руля. Над рычагом имеется шкала 7 истинного положения пера руля. В верхней части корпуса находятся сальники 4 для ввода кабелей.
Внутри корпуса размещены:
- 2 – сельсин-датчик истинного положения пера руля;
- 5 – ограничительные контакты;
- 6 – два сельсина-трансформатора, предназначенные для выработки сигнала U4 = K4β;
- 3 – клеммные платы.
Эксплуатация авторулевого
На рис. 3 (внешний вид прибора ПУ) показаны органы управления и контроля.
Авторулевой включается при помощи рукоятки 9 запуска электродвигателей (левой или правой). При этом начинает работать один из насосов рулевой машины и подается питание на все приборы авторулевого. Загорается лампа 8 или 12, сигнализирующая о работе насоса (левого или правого борта).
На верхней панели прибора ПУ имеется переключатель 18 для установки одного из трех видов режимов управления (автоматический, следящий, простой). СигнализацияПиротехнические средства связи и сигнализации о виде управления выполняется лампами 2 и 19.
Перед выходом судна в рейс надо проверить работу авторулевого в каждом из этих режимов. Сначала необходимо установить простой вид управления и выполнить следующие операции:
- согласовать репитер курса с основным прибором гирокомпаса при помощи рукоятки 3;
- проверить перекладку руля вправо и влево на максимальный угол (35°), нажимая клавиши 16. Контроль осуществляется по стрелке аксиометра.
Затем установить следящий режим, поворотом штурвала 15 вправо (или влево) создают угол перекладки руля 30° (стрелка заданного положения руля) и убеждаются, что стрелка истинного положения руля приходит на тот же отсчет с точностью ± 2°. Также проверяют отработку руля на максимальный угол (± 35°). Вращая штурвал в обратную сторону, устанавливают руль в диаметральной плоскости и проверяют работу механического стопора.
Заканчивается проверка авторулевого в автоматическом режиме. В этом виде управления необходимо убедиться в нормальной работе БК. Для этого надо рукояткой 4 установить Kос. = 1.
Проверка дифференцирующего узла БК выполняется в следующем порядке. Регулятор 17 устанавливают в положение “1,0”. Это обеспечивает выработку максимального сигнала U2 = K2α. На время проверки сигнал создается вращением вручную валика сельсина В2 (см. рис. 2). Для этого необходимо поднять верхнюю крышку прибора ПУ, откинуть механизм, в котором расположен сельсин В2, и равномерно вращать ось сельсина, наблюдая за перемещением стрелки заданного положения руля по аксиометру. Вследствие того, что сигнал будет иметь большую величину, руль быстро перекладывается на борт, о чем свидетельствует стрелка истинного положения руля, устанавливающая на отсчете 35°. Вращение валика сельсина В2 надо прекратить, когда заданный угол перекладки руля достигнет 15°. Сигнал U2 исчезнет, так как прекратил вращаться сельсин В2, и руль должен вернуться (вместе со стрелкой истинного положения руля) на отсчет 15°.
Проверка интегрирующего узла БК выполняется следующим образом. Регулятор производной 17 устанавливают в нулевое положение (при этом сигнал U2 не возникает). При помощи штурвала подвижный индекс в репитере смещают на угол a = 2° вправо от курсовой черты. Этим определяется заданный угол перекладки руля βз = 2°. Возникает сигнал U1 = K1α, под действием которого руль переложится на тот же угол (так как Кос. = 1). Но одновременно появляется сигнал:
величина которого непрерывно возрастает, благодаря чему перекладка руля будет продолжаться в ту же сторону. Это можно заметить по аксиометру: стрелка заданного положения остается на отсчете 2°, а стрелка истинного положения будет отклоняться в сторону увеличения отсчета. Если теперь авторулевой перевести в следящий (или простой) вид управления, интегрирующий узел БК автоматически сбрасывается в нулевое положение, сигнал U3 становится равным нулю, стрелка истинного положения руля возвратится на отсчет 2°, т. е. угол β станет равным углу βз (стрелки аксиометра совместятся).
Выбор оптимального значения регуляторов авторулевого
Известно, что качество работы системы автоматического управления судном по курсу зависит от динамических свойств управляемости судна как объекта регулирования, от состояния погоды и выбора параметров настройки авторулевого. Поэтому однотипные авторулевые, установленные на разных судах будут, как правило, работать по-разному. Этим в основном и объяснятся тот факт, что до настоящего времени не существует каких-либо единых таблиц или графиков, позволяющих определять оптимальные значения параметров настройки авторулевого на судне при изменении условий его эксплуатации.
Настройку авторулевого следует менять в трех случаях:
- При изменении загрузки судна (порожнем, в балласте, с полным грузом).
- При изменении скорости хода (полный, средний, малый ход).
- При изменении погоды (волнения).
При этом необходимо руководствоваться следующими общими положениями:
- Подбирать параметры настройки авторулевого необходимо так, чтобы судно удерживалось на заданном курсе с определенной точностью при минимальных углах перекладки руля;
- Не следует стремиться уменьшить величину рыскания судна на волнении путем повышения чувствительности авторулевого, так как при этом резко возрастает количество перекладок руля;
- При большом количестве перекладок руля (более 400 в час) точность удержания судна на курсе не повышается. Это приводит лишь к ускоренному износу рулевого устройства и потере полезной мощности судовой силовой установки.
Для настройки авторулевого АИСТ в процессе эксплуатации предусмотрена регулировка трех параметров, которыми обеспечивается стабильное качество работы системы при изменении условий плавания судна. Одним из основных регулируемых параметров является установка Кос (коэффициент обратной связи), выбор которого для каждого конкретного судна производится во время приемно-сдаточных испытаний авторулевого. Для судов морского транспортного флота, как показал опыт эксплуатации, величина Кос устанавливается в пределах от 0,2 до 0,8. При полной загрузке судна Кос следует уменьшать, а при плавании порожнем – увеличивать.
Вторым регулируемым параметром является коэффициент сигнала производной KП (сигнал дифференцирующего блока коррекции), определяющий крутизну его характеристики. Для повышения чувствительности авторулевого в тихую погоды KП следует увеличивать, поворачивая рукоятку “Регулировка производной”. При этом точность удержания судна на курсе повышается. При ветре и волнении моря KП следует уменьшить, чтобы не перегружать рулевую машину большим количеством перекладок руля. Если при введении градусной поправки в режиме “Автомат” судно медленно выходит на новый заданный курс, сигнал KП следует уменьшить. Переход судном линии нового заданного значения курса не должен превышать более, чем на 10 % величину установленной градусной поправки.
При необходимости изменить курс суднаОсобенности выбора курсов для океанского перехода на угол более 30° в режиме “Автомат”, следует медленно поворачивать штурвал следящего управления так, чтобы угол рассогласования между подвижным индексом и курсовой чертой не превышал 10-15°.
Регулятор “Грубо-точно” позволяет менять коэффициент усиления всей системы. Рукоятку регулятора устанавливают в положение “Точно” в тихую погоду и в положение “Грубо” при свежей погоде, когда регулятор сигнала производной установлен на минимум.
Если судно при управлении в режиме “Автомат” или “Следящий” перестанет слушаться руля, то необходимо последовательно совершить переход к следующим вариантам управления (до получения положительного результата):
- Переключение на другой насос;
- “Простое управление”;
- “Ручное управление”.
При плавании в узкостях, при входе в порт с целью повышения надежности судовождения рекомендуется одновременно использовать два насоса.






Авторулевой - это как автопилот в авиации, полезная штука, но требует крайней осторожности в эксплуатации.