Как уже отмечалось, системы автоматического (и автоматизированного, т. е. с участием оператора) управления осуществляют операции разового действия: пуска, остановки, реверса и т. п.
Помимо датчиков, усилителей и исполнительных устройств эти системы включают логические элементы, предназначенные для формирования выходных сигналов, идущих на исполнительные устройства. В основе последовательности работе логических устройств и их взаимосвязи лежит программа или заданный Оптимальные и адаптивные системы суднаалгоритм управления.
Основные понятия алгебры логики
Логические элементы объединяются в логический автомат, связывающий входные сигналы от датчиков управления x1, …, xm с выходными, идущими на исполнительные устройства y, …, yn (рис. 1).

Величина сигнала на выходе датчиков и входе исполнительных элементов, как правило, меняется скачками. Логические элементы также, как правило, имеют входные и выходные сигналы дискретного вида. Основные задачи, с которыми встречается инженер-механик в эксплуатации и проектировании систем управления — это задачи поиска неисправностей и оптимизации системы с целью повышения ее надежности и снижения стоимости. Для решения этих задач используется аппарат алгебры логики (булевой алгебры).
Рассмотрим некоторые основные понятия алгебры логики. Применительно к электрическим логическим эле-ментам условимся, что факт отсутствия напряжения на i-ом входе логического блока соответствует значению xi = 0, факт его наличия xi = 1, факт отсутствия напряжения на i-ом входе yi = 0, факт наличия yi = 1.
Это же в целом относится к отдельным логическим элементам. Таким образом, всякая переменная в алгебре логики может принимать значение 0 или 1.
Функцией переменных или переключательной функцией называют функцию (или выходную величину f(x1, x2, …, xn), которая также может принимать лишь два значения 0 или 1 и зависит от аргументов — входных величин x1, x2, …, xn. В булевой алгебре существуют следующие операции: отрицание, сложение и умножение. Отрицание (инверсия, дополнения) означает, что выходная величина изменяет свое значение на противоположное. Например: x = 1; x = 0 (здесь х означает, что берется величина НЕ x). Если x = 0, то x = 1.
Предлагается к прочтению: Судовое оборудование ГМССБ
Логическое умножение (пересечения или конъюнкция)
Означает, что f(x1, x2) = 1 только при x1 = 1 и x2 = 1. Эта операция называется И и соответствует условию появления напряжения на лампе (рис. 2, а) в зависимости от положения контактов реле, если последние включены в цепь лампочки последовательно.
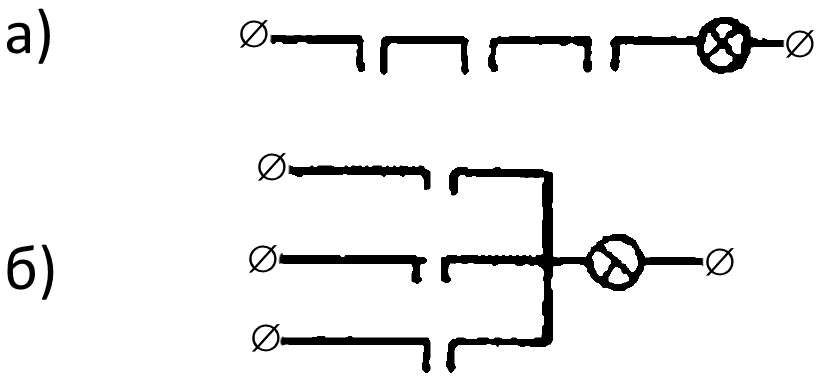
а — элемент И; б — элемент ИЛИ
Логическое сложение (дизъюнкция):
Эта логическая функция означает следующее:
Эти операции иначе называются ИЛИ и физически соответствует условию появления напряжения на лампочке в зависимости от положения контактов a, b, и c.
В алгебре логики существуют следующие основные законы
1 переместительные:
2 сочетательные:
3 распределительные:
4 инверсии:
называются И — НЕ и ИЛИ — НЕ.
При описании Процессы в судовых системах автоматического управления. Особенности настройки регуляторовсхемы управления используются сложные булевые функции, содержащие как произведения, так и суммы булевых переменных. Различают две нормальные формы выражений логических функций: дизъюнктивную и конъюнктивную. Нормальная дизъюнктивная форма (НДФ) содержит сумму членов функций, записанных в виде произведений, например:
Нормальная конъюнктивная форма (НКФ) содержит произведение сумм, например:
САУ, в которых предусматривается последовательность во времени работы исполнительных устройств, называются многотактными. В них имеются временные задержки и элементы памяти. Функционирование многотакгных САУ описывается с помощью рекуррентных булевых функций.
Логические элементы и схемы на логических элементах
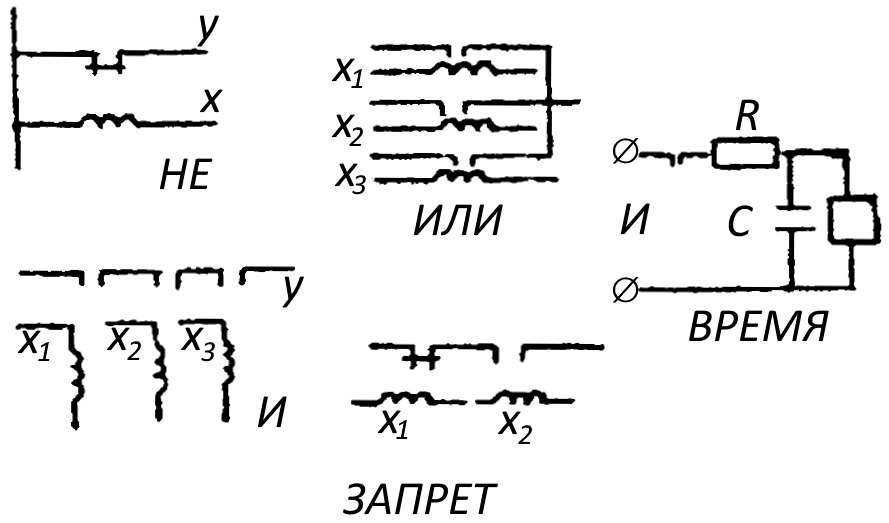
В системах автоматического управления на водном транспорте нашли применение логические элементы раз-личного типа: на электромагнитных реле, пневматические, гидравлические, полупроводниковые. Наибольшее применение в системах ДАУ на судах нашли пневматические логические элементы и на электромагнитных реле. В частности Морская сигнализация и связьсхемы аварийно-предупредительной сигнализации и защиты выполняются в основном на электромагнитах реле, а схемы управления пуском и реверсом — на пневмоэлементах или гидравлическими. На рис. 4 представлены схемы релейно-контактных логических элементов различного типа и приводятся реализуемые или булевые функции.
Основой для составления схемы управления служит алгоритм выполняемых схемой логических операций.
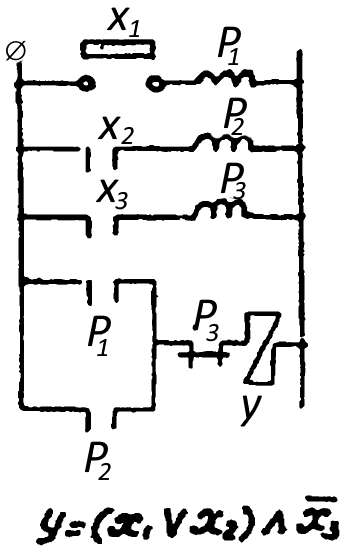
Допустим необходимо реализовать следующий алгоритм: требуется подать питание на исполнительный эле-мент (выходная величина y), если замыкаются контакты реле 1 (обозначим x1) или реле 2 (x2). Питание должно быть прекращено, если частота вращения достигнет заданного уровня (реле скорости x3).
Булевое уравнение рассмотренной схемы примет вид:
На рис. 5 представлена схема системы на электроконтактных элементах, включающая последовательно соединенные элементы ИЛИ и НЕ.
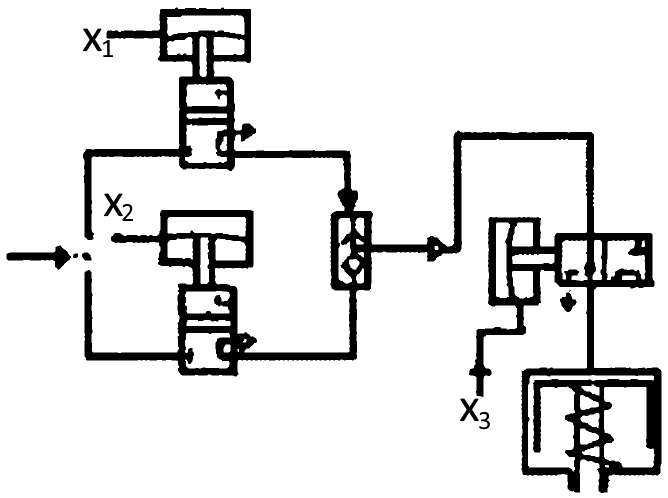
На рис. 6 представлена схема этой же системы на пневматических элементах.
Интегрированные системы управления судоходствомСовременные системы управления — ДАУ и аварийно-предупредительной сигнализации включают сложное сочетание логических элементов, включающих временные задержки, элементы памяти и др.
Методы контроля исправности систем управления
В настоящее время используются следующие методы проверки систем управления:
Встроенный контроль. Для выполнения проверочных операций в схему управления дополнительно вводятся логические элементы, которые контролируют выполнение каждой операции и автоматизируют процесс проверки. Такого типа контроль осложняет схему.
С помощью имитатора водных сигналов. При контроле этого типа вместо датчиков устанавливается имитатор входных сигналов, на котором с помощью ключей наблюдаются входные контролирующие наборы. В этом случае возможны два способа построения наборов:
- наборы имитируют выполнение каждой операции. Способ проверки при этом трудоемкий.
- наборы построены на основании логических методов. В последнем случае число операций контроля значительно сокращается.
В результате контроля может быть определен не только факт исправности схемы, но и при определенном увеличении числа операций контроля (так называемый диагностический тест) может быть локализовано место не-исправности. При подобной проверке имеется в виду прежде всего такая неисправность, которая изменяет логику работы элемента. Эта неисправность называется логической. Одной логической неисправности может соответствовать несколько физических неисправностей, обусловливающих одну и ту же логику работы неисправного элемента.
Читайте также: Системы основных групп, обеспечивающие корректную работу плавучих доков
Релейные элементы имеют всего две логические неисправности:
- когда имеет место обрыв;
- когда элемент (контакт) постоянно замкнут.
При контроле схемы устанавливают факт логической неисправности и локализуют ее. Это позволяет в дальнейшем перейти к анализу соответствующей физической неисправности. Логическая неисправность элемента должна быть установлена по характеру выходного сигнала при определенном сочетании, наборе входных сигналов. Например, для схемы из 2-х параллельно соединенных контактов, образующих элемент ИЛИ, обозначая через неисправность контакта №1 — обрыв, №2 — контакт постоянно замкнут, получим таблицу состояний выхода элемента — табл. 1.
Итак, если в схеме имеется хотя бы одна логическая неисправность, то она проявит себя на одном из трех первых наборов, которые составляют контролирующий тест. Последний набор не дает с этой точки зрения какой-либо информации.
Второй и третий наборы позволяют различить первую неисправность любого из 2-х элементов, а первый набор — вторую неисправность, которая может быть в обоих элементах, однако — в каком — установить не удается.
Вместе с тем, контролирующий тест, устанавливающий факт неисправности, по числу наборов меньше, чем максимально возможное сочетание входных элементов, равное 22 — 4. Подобный принцип ложится в основу логического контроля схем, содержащих не один, а несколько элементов. Минимальное сочетание входных наборов, позволяющее полностью проконтролировать логическую схему, называется минимальным контролирующим тестом.
Этапы контроля схемы из нескольких элементов с одним выходом сводятся к следующему:
- функциональное построение схемы описывается булевыми уравнениями, связывающими выходную величину у с входными: x1, x2,x3 …;
- система булевых уравнений приводится к нормальной дизъюнктивной форме НДФ. Эта операция соответствует выделению в схеме параллельных звеньев;
- в каждом слагаемом, представляющем собой произведение булевых переменны и называемых термом, каждой букве (сомножителю) поочередно задается значение ноль при условии, что остальные сомножители этого терма должны быть равны единице;
- подбираются значения входных переменных, таким образом, чтобы все сомножители одного терма принимали значение единица, а в остальных термах хотя бы один сомножитель был равен нулю.
Эта операция соответствует проверке всех параллельных звеньев на замкнутость цепей. В качестве примера построим контролирующий тест для схемы на рис. 7.
- при составлении булевой функции схемы рис. 7 введем обозначения: контакты IPT — x1 контакты РПТ — x2, контакты 2РТ — x3, катушка реле РПМ — y.
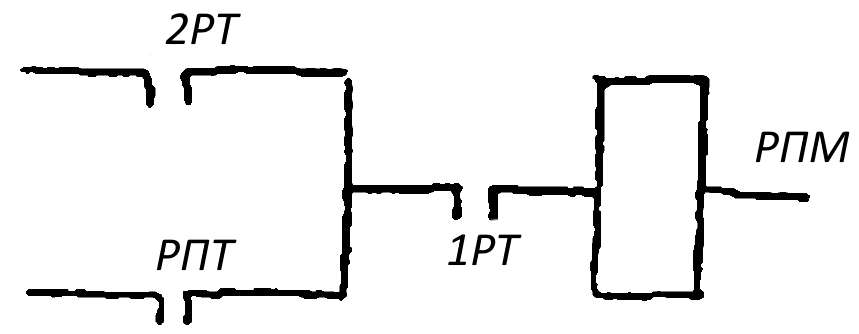
Уравнение для схемы рис. 7 в булевых переменных принимает вид:
- приводим функцию у к НДФ:
Примечание: Обслуживающие системы главного дизеляТеория контроля логических схем автоматики дизелей изложена в трудах ктн. доц. Л.В.Баскакова.
- проверяем каждую букву в каждом терме на 0 и каждый терм на 1, в результате чего получаем контролирующий тест в виде табл. 2.
Контролирующий тест состоит из 4-х наборов, в то время, как максимальное количество возможных наборов в рассматриваемой схеме составляет 23 = 8.
Синтез логических систем
Пример операций синтеза логической системы.
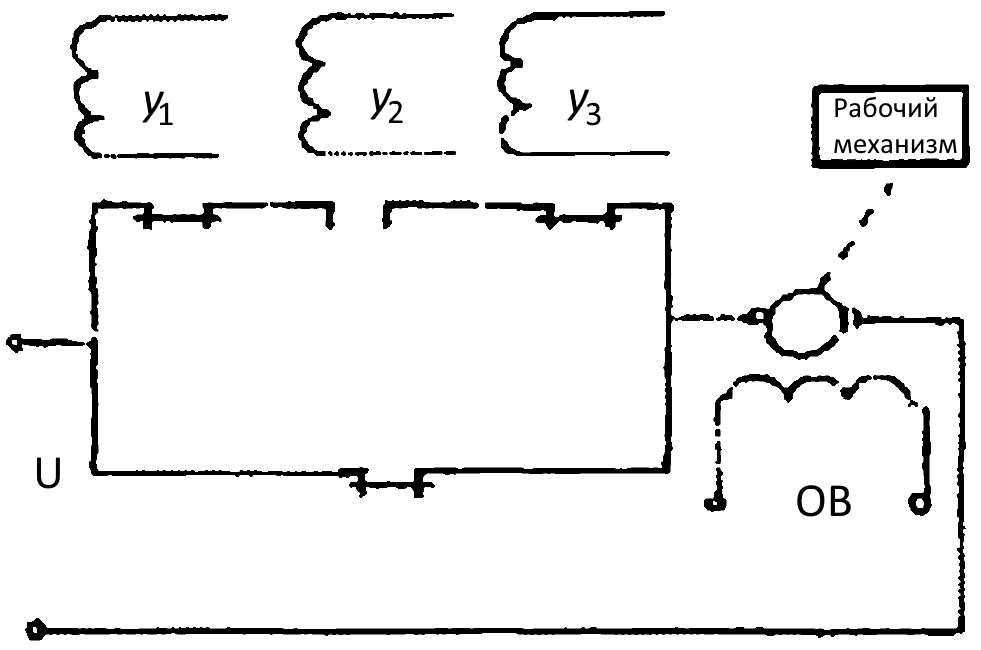
Синтезом логической системы называется проектирование логической системы по заданному алгоритму. Пусть требуется разработать логический автомат для пуска и остановки электродвигателя постоянного тока. Автомат должен работать на основании получаемой информации от трех датчиков y1, y2, y3. Для кодирования сигналов и состояния электродвигателя используется двоичная система исчисления. Отсутствие или наличие сигнала от датчика закодируем соответственно цифрами 0 и 1, Средства автоматизации главных энергетических установоквключение и выключение двигателя — соответственно цифрами 1; 0. Состояние автомата на выходе обозначим величиной x.
Положим, что алгоритм функционирования автомата представлен в табл. 3.
Составим нормальную дизъюнктивную функцию, с этой целью для каждой строчки, в которой величина x равна 1, составим конъюнкции:
3-я строчка
4-я строчка
5-я строчка
6-я строчка
7-я строчка
Соединим полученные конъюнкции знаком дизъюнкции:
Произведем минимизацию полученной НДФ. Воспользуемся для этого законами алгебраической логики. Вынесем за скобки общие множители:
Дизъюнкции
всегда истинны, т. е. равны 1. Поэтому уравнение перепишется в виде:
Полученное выражение является минимальным по сравнению с исходной функцией. Записанный алгоритм функционирования содержит элементарные логические функции И, ИЛИ, НЕ. Для его реализации выберем электромагнитные двухпозиционные реле. Логическая операция И реализуется на реле путем последовательного включения контактов, операция ИЛИ — путем параллельного включения контактов и операция НЕ — на нормально замкнутых контактах.
Это инетерсно: Печатающие устройства (принтеры) используемые на судах
Структурная и функциональные схемы после минимизации приведены рис. 8. Сравнение функциональных схем показывает, что колво элементов (контактов) в результате минимизации сократилось с 15 до 4.
Понятие о надежности элементов автоматики
Под надежностью понимается свойство системы (изделия) выполнять заданные функции, сохраняя свои эксплуатационные показатели в установленных пределах в течение требуемого промежутка времени. Для оценки надежности вводятся ряд понятий и показателей:
- работоспособность — состояние изделия, при котором оно в данный момент времени соответствует всем, предъявляемым к нему, требованиям;
- отказ — нарушение работоспособности изделия;
- наработка на отказ T0 — математическое ожидание времени безотказной работы изделия между отказами.
Величину T0 определяют по экспериментальным данным, как среднее значение времени работы изделия между отказами, т. е.
где:
- t1, t2, …, tn — время работы изделия между отказами;
- n — количество происшедших отказов, интенсивность отказов λ – величина обратная T0:
- – вероятность безотказной работы P0(t) — вероятность того, что при определенных условиях эксплуатации в заданном интервале времени или в пределах заданной наработки отказ изделия не возникает:
Имеются также такие показатели, как Общие методы ремонта и повышения ресурса деталейсреднее время ремонта Tрем, коэффициент готовности и другие: ремонтопригодность, коэффициент технического использования.
Перечисленные понятия и показатели позволяют обоснованно переходить к выбору элементов системы автоматики, добиваясь высоких значений P0(t), кг.
Система автоматики состоит из большого числа эле-ментов, соединенных последовательно, параллельно или смешанным образом. Наиболее просто рассчитывать вероятность безотказной работы системы P0(t) при последовательном соединении n элементов. Если вероятность безотказной работы элементов P01(t), P01(t) …, P0n(t), то вероятность безотказной работы системы может быть определена, как произведение вероятностей безотказной работы составляющих изделие элементов:
Поэтому величина λ для системы из последовательно соединенных элементов связана с величинами λ1, λ2 … отдельных элементов зависимостью:
При параллельном соединении элементов (резервировании) и выходе из строя одного из элементов работоспособность системы не нарушается. Таким образом, параллельное соединение элементов позволяет повысить надежность системы и уменьшить вероятность отказа (однако стоимость и весогабаритные показатели увеличиваются).
Примем за вероятность отказа i-гo элемента P величину
Тогда при параллельном соединении элементов вероятность отказа системы будет равна произведению вероятностей отказов ее элементов.
Надежность системы определяется по формуле
Повышение надежности системы автоматики возможно:
- за счет повышения надежности отдельных элементов;
- за счет резервирования, особенно менее надежных цепей — создание дублирующих цепей.





