Системы автоматического регулирования нашли широкое применение в системах автоматизации судовых энергетических установок. В частности САР прямого и непрямого действия применяются для регулирования частоты вращения (САРС) и температуры (САРТ).
- Исследования процессов в системах регулирования скорости и температуры охлаждения ДВС
- Общие сведения по автоматизации СДВС
- Особенности выбора параметров и настройки регуляторов прямого действия с присоединенным катарактом
- Особенности настройки регулятора непрямого действия с изодромной обратной связью
- Особенности регулирования дизель-генераторов при параллельной работе
- Автоматическое регулирование температуры в системах охлаждения и настройка регуляторов температуры
Исследования процессов в системах регулирования скорости и температуры охлаждения ДВС
Общие сведения по автоматизации СДВС
- системы автоматического регулирования;
- частоты (скорости) вращения — САРС;
- температуры в системах охлаждения и смазочных — САРТ;
- уровня в топливных, масляных, водяных расходных баках и давления в воздушных баллонах, заряда в аккумуляторных батареях.
- системы автоматического (Дистанционное автоматизированное управление главным двигателем суднадистанционного автоматизированного) управления (САУ и ДАУ) осуществляющие операции:
- автоматической аварийно-предупредительной сигнализации;
- автоматического или дистанционного (автоматизированного) пуска с производством предпусковых операций, автоматической подготовки к приему нагрузки, автоматизированным управлением изменением частоты вращения вала и реверсированием, автоматическим под-держанием дизеля в состоянии готовности к быстрому приему нагрузки, автоматическую или дистанционную остановку с выполнением послеостановочных операций (системы ДАУ);
- автоматическое или автоматизированное техническое диагностирование.
Объемы автоматических операций САР и САУ (ДАУ) дизелей установлены ГОСТы, по которым различают следующие степени автоматизации дизелей:
- 1-ая, со временем необслуживаемой работы не менее 4 ч, включающая операции п. 1 а, б и 2 а.
- 2-ая, со временем необслуживаемой работы дизеля не менее 24-х часов, включающая операции по 1 степени и дополнительно п. 2 б).
- 3-я, то же, не менее 150 ч, операции по 2 степени и дополнительно по п. 1 б.
- 4-я, то же не менее 250 ч, операции по 3 степени и дополнительно по п. 1 в.
САРС дизелей служит для обеспечения:
- автоматического поддержания частоты вращения дизеля в заданном диапазоне;
- равномерного распределения нагрузки между параллельно работающими дизелями (дизель-генераторами – ДГ);
- дополнительных функций в системе ДАУ (выключения подачи топлива и др.).
Общие технические требования к САРС установлены ГОСТ 10511-72г.
Помимо изложенной в “Судовая автоматика и аппаратура контроля дизеляКлассификация систем автоматики. Основы теории взаимодействия дизеля и устройств автоматического регулирования” классификации САР на системы: прямого и непрямого регулирования, с принципом регулирования по отклонению и комбинированному, статические и астатические, САРС также делят по конструктивным признакам на: однорежимные, обеспечивающие регулирование в узком диапазоне измерения частоты вращения, применяемые для ДГ, всережимные — для широкого диапазона частоты вращения, применяемые для главных судовых (а также транспортных) дизелей, а также нереверсивные и реверсивные, автономные (выполненные в виде отдельного узла), неавтономные.
Так как одна и та же базовая конструкция дизеля может служить как для главного судового дизеля, так и в качестве привода для генератора, то зачастую конструкции регуляторов скорости для одной и той же базовой конструкции дизеля делают по основным узлам одинаковой. Однако в случае применения регулятора для главного судового дизеля задачи регулирования благодаря большому самовыравниванию объекта значительно упрощаются. Кроме того, сами требования к точности регулирования не являются столь высокими по условиям работы на судне по винтовой характеристике. В случае же применения той же базовой конструкции дизеля для привода генератора переменного тока задачи регулирования значительно усложняются. Во-первых, сам объект регулирования — ДГ — может быть при наличии автоматического регулятора напряжения — звеном неустойчивым. Кроме того, частота тока ДГ должна поддерживаться в узких пределах для того, чтобы обеспечить нормальную работу агрегатов и судовой сети освещения.
Эти требования ужесточаются при работе навигационных приборов, радиолокации и ЭВМ. В связи с изложенным в базовую конструкцию регулятора должна вводиться специальные корректирующие или другие устройства. Во всех случаях регуляторы должны иметь устройства для связи с ДАУ, например, для дистанционной настройки скорости, местной или дистанционной остановки дизеля, регулировки наклона статической характеристики, исполнения команд по аварийным сигналам от устройства защиты и др.
В целом назначение регулятора определяет его выбор по классу точности, которых имеется четыре. Для ДГ применяют САРС 1-го и 2-го класса точности. Ко 2-му классу точности максимальный заброс частоты вращения φmax = 7,5 %, а длительность переходного процесса tn = 3c, для главных судовых дизелей применяются САРС 3-го и 4-го класса точности. По 4-му классу точности φmax = 15 % и tn = 10с. САРС дизелей с газотурбинным наддувом должны обеспечить перечисленные требования только при сбросе 100 %-ной нагрузки и при набросе нагрузки значения ниже 100 %, величина, которой определяется в зависимости от степени наддува. Чем больше степень наддува, тем ниже допустимая величина ступенчато набрасываемой нагрузки.
Рассмотрим особенности настройки наиболее распространенных типов регуляторов скорости (PC).
Особенности выбора параметров и настройки регуляторов прямого действия с присоединенным катарактом
Схема регулятора прямого действия с упруго присоединенным катарактом представлена на рис. 1. Регуляторы этого типа применяются для ДГ с дизелями 412/14, 410, 5/13 и 4415/18. Для дизелей этого типа, работающих на винт, используются модификации регуляторов без катаракта и без настройки статизма.
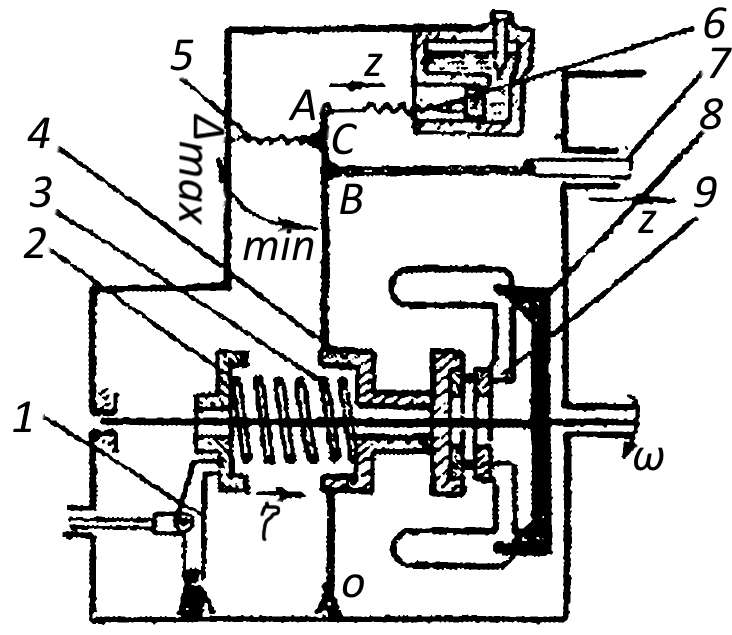
1 – рычаг управления; 2 – тарелка; 3 – основная пружина; 4 – муфта; 5 – дополнительная пружина; 6 – катаракт; 7 – рейка топливных насосов; 8 – крестовина; 9 – грузы
Регулятор работает следующим образом. При уменьшении нагрузки на генератор числа оборотов дизеля и регулятора увеличивается, грузы 9, преодолевая сопротивление основной 3 и дополнительной 5 пружин и пружины катаракта 6, расходятся и передвигают рейку 7 в положение, соответствующее уменьшенной подаче топлива. Поршень катаракта со временем выдавит масло через отверстие, частично прикрываемое иглой и пружина 6 не будет воздействовать на измеритель регулятора. Следовательно, на установившихся режимах положение муфты 4 будет определяться центробежной силой грузов, приведенной к муфте и силой пружин 3 и 5.
Вывод уравнения упруго присоединенного катаракта произведем на основе уже изложенных в “Судовые автоматические системы, регулировка дизеля и котлаОсновные свойства объектов автоматических систем судна“, из соображений, полагая, что расход жидкости через отверстие Q при ламинарном истечении, определится по формуле:
где:
- f — площадь поршенька катаракта, Xкат — его координата.
Пренебрегая относительно малыми силами гидравлического трения поршенька о цилиндр и силами инерции, получим уравнение движения поршенька в виде
где:
- cк — жесткость пружины катаракта;
- m — передаточное отношение плеч рычага.
Окончательно опуская вывод, получим:
где:
- — постоянная времени катаракта обычно Ti, лежит в пределах 1-0,01с, ξ = xкат/xкат.ном; n = y/Yном.
Уравнение чувствительного элемента было получено в “Элементы автоматических систем суднаИзмерительные (чувствительные), преобразовательные элементы и датчики“. Однако в нем дополнительно необходимо учесть силу пружины катаракта, которая пропорциональна разности координат η – ξ и жесткости пружины катаракта.
В результате уравнение чувствительного элемента примет вид:
где:
- δc — коэффициент пропорциональности, который, в частности тем больше, чем больше Cк.
Обычно величина δc, называемая временной степенью неравномерности и составляет 0,03 ÷ 0,07. Знак — перед φ означает, что в уравнении (27) уже учитывается единичная отрицательная обратная связь.
Система уравнений САРС с регулятором скорости с упруго присоединенным катарактом для объекта без самовыравнивания имеет вид:
На установившихся режимах η – ξ, производные равны нулю и система (27’) приводится к виду δη = -φ, т.е. описывает статическую зависимость между моментом дизеля и отклонением числа оборотов. Величина δ равна наклону статической характеристики. Рассмотрим качество переходных процессов с помощью диаграммы Вышнеградского. Для упрощения будем считать, что двигатель работает на холостом ходу x = 0. Тогда характеристическое уравнение системы регулирования и параметры Вышнеградского примут вид:
Если величину δ выбрать достаточно малой, то параметр Вышнеградского B будет также малым.
Процесс регулирования (при A > 1) будет соответствовать области 1 диаграммы Вышнеградского, т.е. будет колебательным. Время переходного процесса tn достаточно велико.
Проанализируем теперь процесс регулирования при включенном катаракте. Будем последовательно ввертывать иглу катаракта.
При
Для такого случая характеристическое уравнение примет вид:
Так как суммарная степень неравномерности возрастает и составляет δ + δc, то точка В двигается по диаграмме Вышнеградского в сторону меньшей колебательности процесса.
В реальных случаях, когда игла вывернута на определенную величину, процесс регулирования происходит следующим образом: при движении муфты 2 поршень катаракта вследствие сопротивления вытесняемой им жидкости первое время практически не двигается. Поэтому процесс регулирования происходит так же как в системе с регулятором прямого действия, без упруго присоединенного кгаракга и с жесткостью основной пружины регулятора, равной суммарной жесткости основной и дополнительной пружин, а также пружины катаракта. Однако увеличение степени неравномерности регулятора (δ + δc) является лишь временным, так как поршень 1, медленно перемещаясь, разгружает пружину 6. Остающаяся степень неравномерности определяется лишь жесткостью основной и дополнительной пружин. Устойчивость такой системы в основном зависит от временной степени неравномерности δ + δc. При значительном увеличении TI может возрасти длительность переходного процесса tn, также как и величина перерегулирования.
Предлагается к прочтению: Научно-исследовательские и учебные суда
Практически наладка САРС осуществляется экспериментальным путем. Требуемый наклон регуляторной характеристики устанавливают, сбрасывая и набрасывая 100 % нагрузки, постепенно изменяя положение дополнительной пружины 5.
Изменяя положение иглы катаракта и TI, добиваются такого ее положения, при котором максимальное отклонение числа оборотов и tn не превышали бы требуемых величин.
На основании критериев Вышнеградского можно также установить, что требуемое значение Ti зависит от времени разгона агрегата Ta и постоянной времени измерителя Tч. Чем меньше Ta, которое обычно уменьшается при форсировке ДВС, тем труднее достичь требуемых значений A и B. Чрезмерное увеличение работоспособности регулятора прямого действия за счет увеличения масс его грузов приведет к увеличению Tч2, что вызовет уменьшение критериев A и B и может отрицательно сказаться на устойчивости регулирования.
Особенности настройки регулятора непрямого действия с изодромной обратной связью
На рис. 2 представлена Ремонт регуляторов давления, температуры и расхода массы дизелясхема регуляторов двигателя Г-74: изодромной обратной связью. При набросе нагрузки поддерживающая сила грузов с уменьшением оборотов уменьшается, золотник 7 опускается, открывая доступ маслу в нижнюю полость сервомотора. Сервопоршень 2 идет вверх, увеличивая подачу топлива и восстанавливая число оборотов. Ведущий поршень 1 изодромной обратной связи, двигаясь вверх вместе с сервопоршнем, выдавливает масло в полость над подвижной втулкой 8 золотника. Втулка опускается, окна, через которые масло поступает к сервопоршню, прикрываются, скорость движения поршня уменьшается. В установившихся режимах изодромная обратная связь не действует, так как под влиянием силы пружины втулка возвращается в одно и то же положение, соответствующее разжатой пружине.

1 – ведущий поршень гибкой (изодромной) обратной связью (ГОС); 2 – сервопоршень; 3 – пружина сервопоршня; 4 – пружина измерителя; 5 – грузы; 6 – привод к измерителю от двигателя; 7 – золотник; 8 – подвижная втулка золотника; 9 – пружина ведомого поршня ГОС; 10 – игла изодрома
Так как вид дифференциальных уравнений всех элементов системы известен, приведем для регулятора без жесткой обратной связи систему уравнений:
- — уравнение объекта для регулятора без ЖОС;
- — уравнение сервомотора;
- — уравнение измерителя;
- — уравнение изодромной обратной.
На рис. 3, а представлена структурная схема системы, на рис. 4 — схема элементов гибкой обратной связи.
Передаточная функция замкнутой системы имеет вид
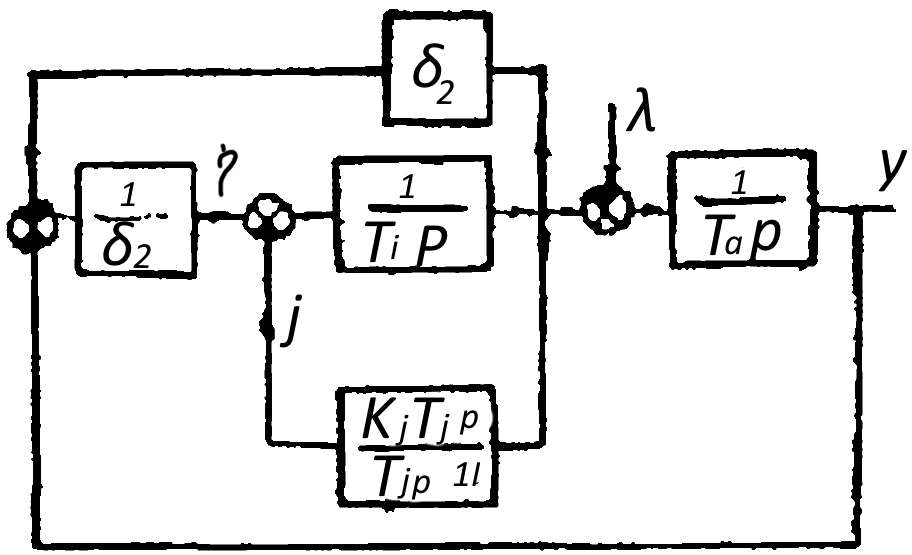
На установившихся режимах Ф(0) = 0 — система регулирования только с изодромной обратной связью — астатическая. Для статизма системы необходимо дополнительно было бы ввести жесткую обратную связь (как это выполнено, например, в регуляторах дизелей типа Д – 100). Так как игла изодрома завернута на определенную величину, которая соответствует выполнению условия
в начальный период переходного процесса, то, как это было изложено в предыдущей лекции, приводит к снижению коэффициента усиления регулятора в первый период и обеспечению необходимого запаса устойчивости. Чем больше завернута игла, тем больше постоянная времени T j и длительнее этот период, однако величина перерегулирования может возрасти. Поэтому настройка регулятора производится экспериментально, при работе дизеля.
Изодромная обратная связь – (рис. 3, б) – выключаемая. При набросах нагрузки большой величины в первый момент ведомый поршень изодрома значительно отклоняется от своего среднего положения и соединяет сливное отверстие с полостью изодрома. Изодромная обратная связь выключается. Это приводит к временному увеличению скорости сервопоршня и снижению величины перерегулирования. В дальнейшем сливное отверстие перекрывается, а изодромная обратная связь начинает действовать, обеспечивая устойчивость системы.
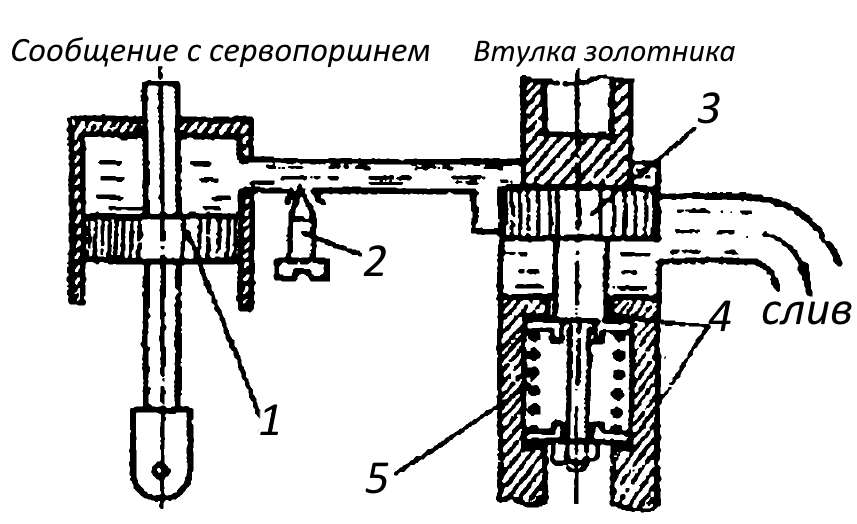
1 – ведущий поршень; 2 – игла изодрома; 3 – ведущий, доршень; 4 – прокладки; 5 – пружина ведомого поршня
Приведем анализ устойчивости системы регулирования непрямого действия с гибкой и жесткой обратной связью с помощью амплитудно-фазового частотного метода (по критерию Найквиста).
Читайте также: Навигационное оборудование, используемое в малотоннажном судостроении
АФХ разомкнутой системы, структурная схема которой соответствует рис. 4, рассчитана для следующих параметров:
При Tj = 0,001c запас устойчивости по модулю и фазе незначителен и меньше требуемого. С увеличением Tj запас устойчивости увеличивается (рис. 4).
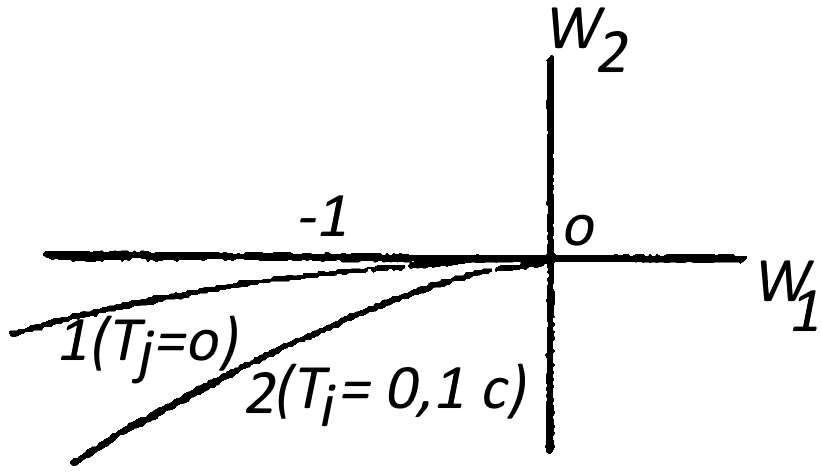
а – Tj – 0; б – Tj > 0
Настройка регулятора непрямого действия с изодромной обратной связью включает такие операции, как:
- определение оптимального положения иглы изодрома для получения заданных показателей качества переходных процессов;
- изменение среднего положения ведомого поршенька ГОС путем смены прокладок под пружиной в случае, если забросы чисел оборотов при сбросе и набросе нагрузки различны по величине. Этим достигается равенство забросов чисел оборотов при сбросе и набросе нагрузки.
Последняя операция имеет значение в основном для дизелей, используемых для привода генераторов.
Если Ремонт автоматики, регуляторов частоты вращения и систем регулированиярегулятор скорости помимо гибкой обратной связи имеет жесткую обратную связь, то операция настройки включает — установку требуемого наклона статической характеристики САРС путем регулировки передаточного отношения в ЖОС.
Особенности регулирования дизель-генераторов при параллельной работе
Выше упоминалось о требовании, предъявляемом к САРС ДГ, о необходимости регулирования наклона статической характеристики САРС. Это требование вытекает из необходимости обеспечения равномерности распределения активных нагрузок между параллельно работающими ДГ. В противном случае может иметь неэкономичный режим работы ДГ, когда один из них, например, будет работать на холостом ходу или генератор — в режиме двигателя, а второй — на полной нагрузке. При дальнейшем увеличении нагрузки может сработать зашита. Задачи равномерного распределения активной нагрузки решаются регуляторами скорости, реактивной — регуляторами напряжения.
Поясним физическую сущность особенностей регулирования скорости при параллельной работе ДГ. Из курса электротехники известно, что магнитное поле статора, направление которого может быть определено вектором напряжения U, вращается синхронно с магнитным полем ротора. Последний определяет направление ЭДС E, отставая от него на определенный угол 0, который пропорционален электромагнитному моменту Mэл (или мощности генератора P, если предположить примерное постоянство частоты вращения). При параллельной работе двух ДГ их статоры подключены к одной общей нагрузке, поэтому вектор напряжение одного ДГ в каждый момент времени совпадает с вектором напряжения поля статора другого ДГ.
Роторы ДГ, вращаясь синхронно с полями статоров, одновременно вращаются синхронно друг с другом. По-этому
где:
- Mso1 и Mso2 — постоянные, определяемые конструктивными параметрами генераторов.
Величина неравномерности распределения активных или реактивных нагрузок ΔP между двумя параллельно работающими ДГ определяется по формуле
и не должна быть более 10 %.
Так как при устойчивой параллельной работе ДГ их скорости вращения будут одинаковыми, то для анализа распределения активных нагрузок на установившихся режимах можно использовать статические характеристики САРС ДГ. На рис. 5 а показаны идеальные статические характеристики САРС двух ДГ, работающих параллельно и синхоронизованных в точке при работе на холостом ходу, с разными наклонами статических характеристик.
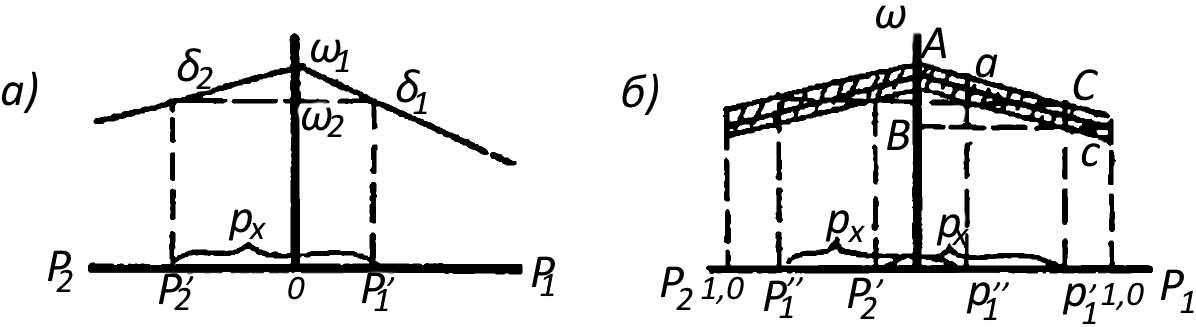
С увеличением общей нагрузки системы Основные свойства объектов автоматических систем суднаактивная нагрузка P2’ второго ДГ, имеющего статическую характеристику с меньшим наклоном, будет больше нагрузки P1’ первого ДГ, и имеющего характеристику с большим наклоном.
На рис. 5 б представлены реальные статические характеристики САРС ДГ, принятые прямолинейными, с одинаковыми наклонами характеристик и основной обратной связи μ =-z, получим замкнутую систему из 2-х последовательно соединенных колебательных звеньев.
В случае, если собственные частоты этих звеньев:
при условии
близки, система может неустойчивой, и в реальной системе могут возникнуть автоколебания.
На схеме рис. 5 б можно показать, что вследствие зоны нечувствительности E величина Δ = E/δ, где δ = ΔP/Pном
Поэтому работа САРС при работе ДГ параллельно с другим ДГ или с сетью может характеризоваться большей колебательностью.
Автоколебания при параллельной работе дизель-генераторов. На рис. 6 приведена схема с маховыми массами, эквивалентная системе параллельно работающих дизель-генераторов. При параллельной работе дизель-генераторов между ними осуществляется электрическая связь. Эта связь подобна механической упругой связи между двумя вращающимися маховиками 1 и 3, к которым приложены крутящие моменты Ttq1 и Ttq2, и диском 2, который тормозится моментом Mэл вследствие сил трения.
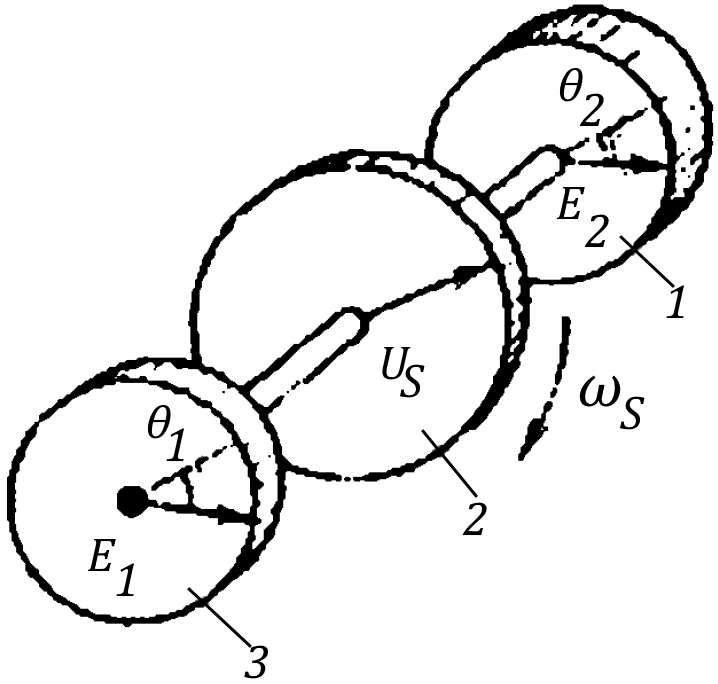
При условии что Ttq1 + Ttq2 = Mэл, средняя угловая скорость системы ms постоянна. При этом маховики 1 и 3 повернуты относительно среднего диска на углы θ1 и θ2, значения которых пропорциональны Ttq1 и Ttq2.
В схеме реальной электромеханической системы под маховиками 1 и 3 подразумеваются вращающиеся массы дизель-генераторов, причем направления ЭДС этих генераторов, как известно, жестко связаны с положением роторов.
Это интересно: Методология проектирования конструкций ледовых усилений по критерию предельной прочности
С вращающимся диском в электромеханической схеме жестко связан вектор напряжения U3. Упругой связью — торсионами связан вектор Us и векторы электродвижущих сил E1 и E2, которые при вращении с синхронной частотой сети ωs опережают вектор U3.
Упругая связь объясняется пропорциональной зависимостью передаваемой в сеть активной мощности (или момента Mэл) от угла 0:
где:
- Mso — коэффициент синхронизирующего момента.
Поскольку значения 0 обычно не превышают 15…20°, то Mэл ≈ Msoθ. При случайном увеличении Ttq растет угол 0 и одновременно возрастает Mэл.
Возникает эффект, подобный увеличению силы упругости пружины при изменении положения массы, подвешенной на этой пружине. Такая система обладает свойствами колебательности. Ниже рассмотрим случай, при котором в этой системе между дизель-генераторами возникают обменные колебания мощности.
Рассмотрим систему дифференциальных уравнений автоколебаний при параллельной работе дизель-генераторов. Зависимость между углом θ и крутящим (или электромагнитным) моментом нелинейно, однако при малых отклонениях угла θ от значения, соответствующего средней нагрузке, при которой происходят обменные колебания мощности, это зависимость линеаризуется, т.е. принимается:
Если пренебречь влиянием регулятора напряжения, что справедливо только для режимов холостого хода и малых нагрузок, получим систему уравнений дизель-генератора, работающего параллельно с электросетью бесконечной мощности:
где:
- ωs = 314 для частоты электросети 50 Гц;
- демпферный момент, обусловленный действием демпферных обмоток, P = (d/dt).
Средства автоматизации главных энергетических установокСистема регулирования дизель-генератора с сетью бесконечной мощности эквивалентна системе двух параллельно работающих дизель-генераторов. Значения Mso и
можно приближенно определить расчетным путем.
В отличие от системы регулирования скорости дизель-генератора, работающий одиночно, дизель-генератор, работающего параллельно с электросетью бесконечной мощности, соответствует колебательному звену. Два соединенных последовательно колебательных звена — объект регулирования скорости и регулятор скорости — представляют собой систему, более близкую к границе устойчивости, чем в случае дизель-генератор, работающего одиночно.
В реальной нелинейной системе между двумя дизель-генераторами или дизель-генератором и электросетью бесконечной мощности могут возникнуть обменные колебания мощности, достигающие большой амплитуды до 30-50 %.
Можно показать, что при условии εрот > εр.с вероятность неустойчивости при соротхорс больше, чем при ωрот < ωр.с.
При работе дизель-генераторах под нагрузкой общая схема взаимодействия регулятора скорости и объекта сохраняется, однако на устойчивость системы влияет корректор напряжения. Усиление действия корректора напряжения с целью обеспечения стабильности напряжения равносильно увеличению частоты собственных колебаний ротора.
Кроме того, система регулирования параллельно работающих дизель-генераторов дополняется вторым контуром регулирования по напряжению. Этот контур может вносить неустойчивость в работу всей системы.
Условие устойчивости для контура системы регулирования скорости прямого действия дизель-генератора, работающего параллельно с сетью, при Mд = 0 будет иметь вид
где:
Поскольку величина демпфирования в генераторе и сдвиг фаз в дизеле относительно малы, то они несущественно влияют на приведенную зависимость. Следовательно, при существующих параметрах дизель-генератора повышению устойчивости будет способствовать увеличение частоты собственных колебаний поступательно движущихся частей регулятора скорости.
Опыт исследований показывает, что конкретными путями для уменьшения коэффициента усиления регулятора скорости являются:
- увеличение передаточного отношения в гибкой обратной связи;
- повышение жесткости упругой муфты привода измерителя скорости, если частота свободных крутильных колебаний является низкой.
Анализ способов устойчивости по контуру регулирования напряжения выходит за рамки настоящего изложения. Ограничимся тем, что отметим возможность обеспечения устойчивости в результате применения гибкой обратной связи в корректоре напряжения.
Автоматическое регулирование температуры в системах охлаждения и настройка регуляторов температуры
Требования к САРТ дизелей были частично изложены выше. Неравномерность регулирования при изменении нагрузки в пределах от 25 до 100 % не должна быть более 12 °С, нечувствительность для терморегуляторов прямого действия недистанционных — РТП и дистанционных — РТПД должна быть не более 0,5 °С, для непрямого действия, дистанционных — РТНД, не более 1 °С, непрямолинейность статической характеристики терморегулятора не должна превышать 15 %.
Различают 2 способа осуществления регулирования путем изменения температуры воды (или масла), входящей в Стационарные двигательные установки малотоннажных судовдвигатель:
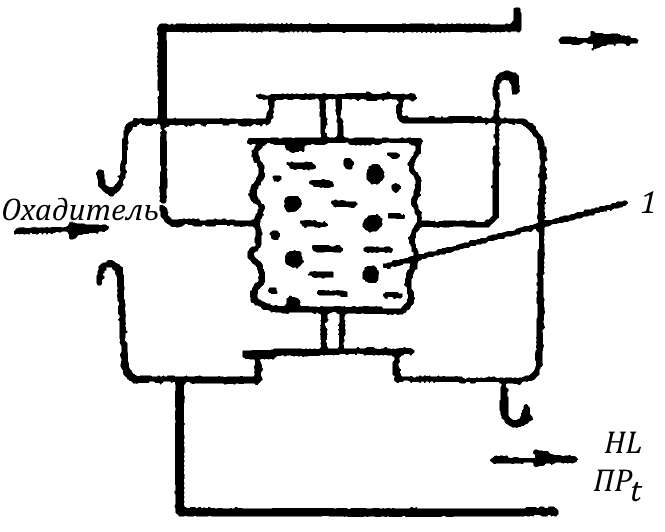
- Cпособом перепуска — САРТ-I. В этой системе регулирующий орган терморегулятора включается во внутренний контур охлаждающей дизель воды и смазочного масла таким образом, при котором температура жидкости на входе в дизель зависит от соотношения ее количества, прошедшего через холодильник и перепуск. К САРТ I относятся системы регулирования дизелей Г-60, НФД, Д-6 и др. Схема САРТ I приведена на рис. 7.
- Способом обвода — САРТ-II — (рис. 8 а), при котором во внутреннем контуре отсутствуют регулирующие устройства. Регулирующий орган терморегулятора включается в контур забортной воды, охлаждающей теплообменник смазочного масла или охлаждающей воды внутреннего контура таким образом, что он может изменять расход забортной воды.
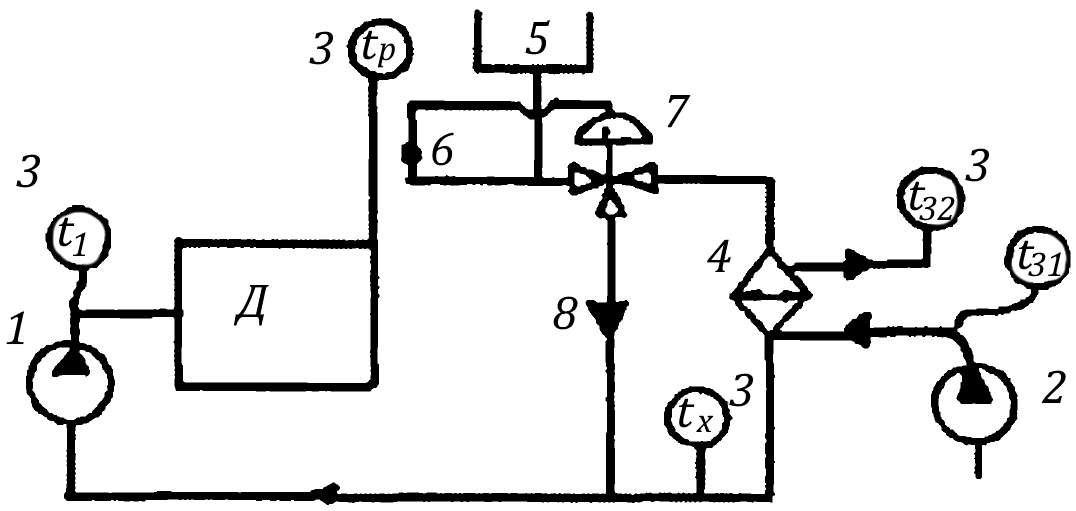
1 — насос охлаходающей воды внутреннего контура; 2 — то же внешнего контура; 3 — термометры; 4 — водомасляный холодильник; 5 — расширительный бак; 6 — чувствительный элемент регулятора температуры; 7 — регулирующий орган; 8 — перепускная магистраль; t31 и t32 — температура воды внешнего контура на входе и выходе, t1 — температура воды на входе двигателя, t — то же на входе, tx — температура воды на выходе водомасляного холодильника
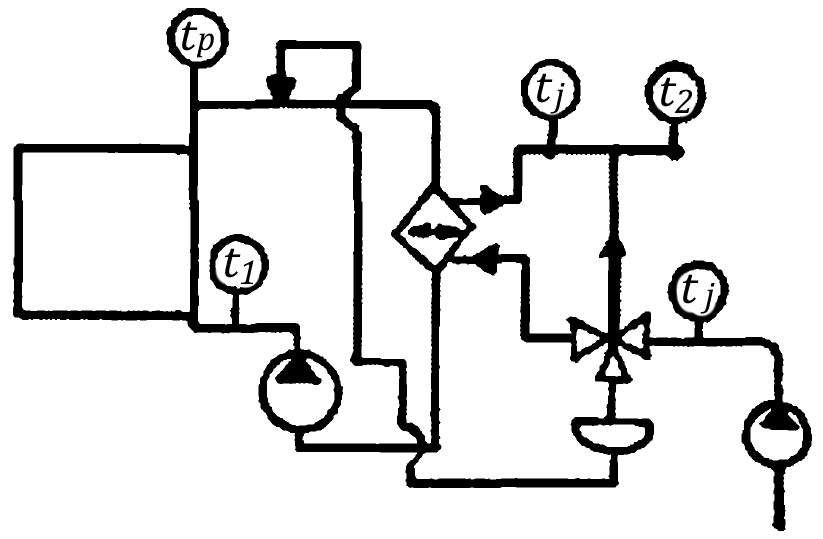
В схемах охлаждения Технологическая карта замены и переборки выпускного клапана СДВССДВС применяются регуляторы температуры прямого и непрямого действия. Особеыности настройки САРТ могут быть проанализированы на примере настройки САР прямого действия. На рис. 8 б представлена схема недистанционного регулятора температуры прямого действия РТП. При увеличении температуры термочувствительная жидкость, наполняющая сильфон 1, расширяется, количество воды, идущей на охладитель и перепуск перераспределяется в сторону уменьшения последнего.
В “Автоматизация СЭУ, топливных и смазочных систем СДВССредства автоматизации главных энергетических установок” показано, что уравнение Ч.Э. температуры может быть представлено в виде:
где:
- Tp — постоянная времени, c;
- h — положение регулирующего органа;
- Kpоб — коэффициент передачи регулятора, характеризующий отношение изменения положения (в данном случае) регулирующего органа к изменению температуры.
Очевидно, чем больше жесткость пружины сильфона, тем меньше его расширение под действием того же перепада температуры, и меньше Kp.
На рис. 9 показана схема дистанционного регулятора температуры прямого действия РПТД. Если пренебречь длиной капиллярной трубки и запаздыванием в ней сигнала, идущего от термобаллона к Р.О., то уравнение регулятора будет соответствовать уравнению (2 – метод малых отклонений).
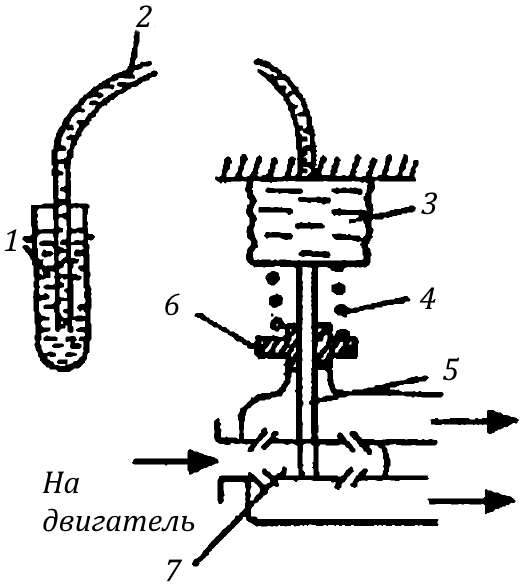
1 — чувствительный элемент; 2 — капиллярная трубка; 3 — сильфон; 4 – пружина; 5 — щиток; 6 — фланец; 7 — регулирующий орган
Было отмечено, что в общем случае объект регулирования температуры — дизель с холодильником может быть представлен в виде схемы, состоящей из последовательно соединенных инерционных звеньев и звена с транспортным запаздыванием τоб1, соответствующих тепловой емкости дизеля T1, холодильника T2 с присоединенными массами воды и запаздыванию в передаче изменения температуры при движении жидкости в системе внутреннего контура. Поэтому П.Ф. разомкнутой САРТ имеет вид:
Передаточная функция замкнутой системы:
На установившихся режимах:
Таким образом, изменение статизма или неравномерности регулирования может быть достигнуто изменением коэффициента усиления регулятора температуры. Как правило, параметры объекта и регулятора таковы, что САРТ устойчивы. В соответствии с требованиями инерционность действия терморегуляторов не должна превышать 40с.
Основы взаимодействия дизеля и устройств автоматического регулированияНастройка регуляторов температуры сводится к настройке:
- максимальной температуры охлаждающей воды на выходе tp при номинальном режиме работы дизеля. В представленной на рис. 9 схеме терморегулятора дистанционного типа это достигается изменением толщины прокладок под пружиной 4;
- максимального перепада температур Δtp
- на выходе воды из дизеля при изменении нагрузки от холостого хода до номинальной (степени неравномерности регулирования). В РТ на рис. 9 это может быть осуществлено путем изменения жесткости пружины 4. Так, например, уменьшение степени неравномерности достигается путем уменьшения жесткости пружины 4.
При необходимости уменьшения степени неравномерности для обеспечения устойчивого процесса может быть применен принцип комбинированного регулирования.





