Оптимальные системы обеспечивают такое управление, при котором выбранный критерий оптимальности (функционал) составляет минимум или максимум. В качестве функционала может быть принят, например, расход топлива или время движения при перемещении управляемого объекта из одной точки в другую — эти задачи называются задачами программирования оптимальных траекторий.
Оптимальные системы (вопрос излагается применительно к задачам оптимизации СЭУ)
Другой группой задач оптимизации является обеспечение минимально-возможных отклонений от заданной траектории. Примером функционала может служить Ремонт регуляторов давления, температуры и расхода массы дизелярасход топлива силовой установкой судна при прохождении пути S за время T, который необходимо оптимизировать в зависимости от различных условий.
где:
- q — мгновенный расход топлива, который является функцией скорости судна S1, пути S и времени τ:
Для решения задач программирования оптимальных траекторий может применяться вариационное исчисление. При использовании вариационного исчисления, в котором условие минимума (максимума) функционала реализуется, когда вариация (производная) бG функционала равна нулю (подобно дифференциальному исчислению, когда производственная равна 0) ~ или, что то же самое, сама функция в этой точке принимает экстремальное значение. Изменив функцию S(τ) на S(τ) + бG, мы изменим также ее производную S1(τ).
В результате получим:
Второй член проинтегрируем по частям:
В рассматриваемой задаче предполагается, что в начальный (τ = 0) и конечный (τ = T) моменты времени скорость судна s1 = 0 и вариация скорости равна также 0, поэтому:
Вариация функционала принимает вид:
Для того, чтобы G = Gmin, необходимо чтобы производная G также была равна 0, (т.е. равна 0 подинтегральная функция).
Уравнение (1) называется уравнением Эйлера. Пропуская вывод, получим:
где:
- c — постоянная интегрирования, V = ds/dt.
Уравнение Эйлера является основополагающим при решении задач оптимизации режимов силовой установки судна.
Предлагается к прочтению: Планирование рейса судна
Рассмотрим в качестве примера оптимальное уравнение силовой установкой судна при учете скорости судна.
Целью решения задачи является выбор оптимального закона регулирования силовой установкой при движении по перегону вверх и вниз по течению имеющий скорость Vт, при минимальном расходе топлива. Примем, что скорость движения относительно воды равна V, общее время пути равно T.
Расход топлива в единицу времени принимается пропорциональным кубу скорости движения, что справедливо при малых отклонениях от среднего значения скорости и нагрузки двигателя
полный расход топлива составит
Минимум интеграла (33) (при S1 = Const) выполняться при условии:
после преобразования приведем уравнение (4) к виду:
где:
- v — скорость относительно грунта
- cv — постоянное значение, называемое коэффициентом срочности.
Решение уравнения можно производить графически, задаваясь различными значениями C.
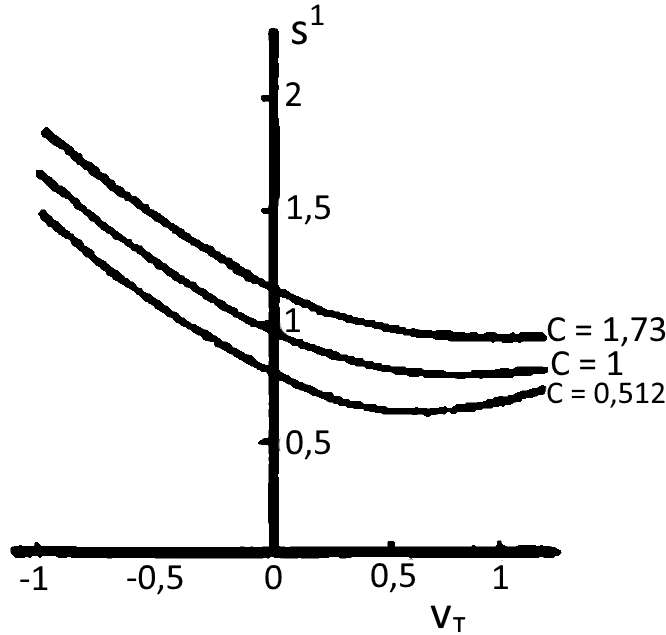
Пример: путь судна на тихой воде имеет скорость 15 км/час. при расходе топлива 20 кг/час. и должно идти 150 км против течения и 150 км по течению, имеющему скорость 6 км/час. Задано общее время хода — 24,5 часа. (Мощность сверх номинальной не допускается). Задаются последовательно значениями C = 1; 0,512 и т.д. и находят, что при оптимальном управлении целесообразно двигаться вниз по течению с истинной скоростью 19,2 км/час, а против течения со скоростью 9 км/час и при этом Процессы в системе автоматического регулирования скорости дизеля с турбонаддувомрасход топлива по сравнению с движением на номинальной мощности сократится на 8 %.
Аналогично решаются оптимальные задачи при движении судна на мелководье.
Решить ту же задачу проще и понятнее методом перебора при Vi1 = variable, можно используя уравнение:
где:
коэффициент A рассматривается по условию, что при V = 15 км/час, B = 20 кг/час.
На рис. 2 представлены расчетные зависимости G(V1, VT).
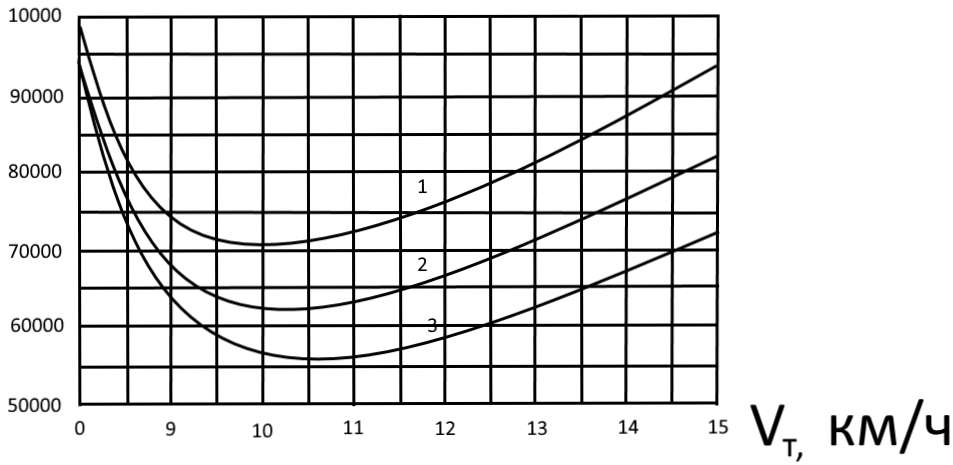
Функционал — оптимальное значение V1опт при G = Gmin может лежать в зависимости от величины VT в пределах от 9,5 до 10,5 км/час. С уменьшением VT величина Gmin уменьшается, a V1опт. изменяется в сторону увеличения. Окончательно получим при G = Gmin и VT = 6 км/час V1опт ≈ 9,7 км/час V2опт ≈ 15 км/час, Gmin на 7-8 % меньше, чем при средней скорости V = const. Представлены графики Gmin = f(VT).
Задачей оптимальной Основные свойства объектов автоматических систем суднасистемы управления скоростью судна на мелководье системы является осуществить такое управление, при котором судно, двигаясь по участкам пути с различной глубиной (обычно h/т < h где h — глубина; T — осадка судна, должна придти в конечный пункт к заданному времени, израсходовав минимум топлива G = Gmin. Такая система относится к 1-му классу систем, обеспечивающих движение объекта по оптимальной траектории. В данном случае речь идет о выборе скорости движения v на каждом участке пути.
Если число участков относительно невелико, то оптимальное управление решается простым перебором значений V. При большем числе участков для анализа также используется уравнение Эйлера.
Еще одно направление создания оптимальных регуляторов для СЭУ является система управления шагом винта и частотой вращения дизеля для обеспечения снижения расхода топлива при сохранении скорости судна заданной величине.
Для решения задач другой группы — минимизации возможных отклонений от заданной траектории используются функционалы (интегральные оценки качества регулирования):
Оптимизация параметров системы регулирования скорости прямого действия дизеля
Используем квадратичную интегральную оценку качества регулирования для оптимизации системы регулирования скорости дизеля с регулятором прямого действия, описываемую уравнениями в виде:
- — уравнение объекта;
- — уравнение регулятора прямого деиствия;
- μ = -η — уравнение основной обратной связи;
- — время разгона дизеля, квадрат времени измерителя и время вязкого трения переведены выше;
- δ — наклон регуляторной характеристики;
- φ, μ, λ, η — отклонение частоты вращения, относительной величины эффективного момента, момента нагрузки и хода муфты регулятора соответственно.
Рассмотрим случай сброса нагрузки. Так как процесс сброса нагрузки носит колебательный характер, то определим квадратичную интегральную оценку качества J2, которая должна быть найдена для уравнения:
Используя правила нахождения определителя для составления J1 и пропуская промежуточные выкладки, получим:
где:
- — формула получена А. А. Красовским.
Величина Tα определяется маховыми массами дизель-генератора, величина δ — требованиями к точности регулирования, Tα — требованиями к устойчивости. Поэтому эти величины не изменяются.
Следовательно, для того, чтобы значение J было небольшим, должна быть малой величина Tr2. Однако величина Tr2 пропорциональна массе поступательно движущихся частей измерителя частоты вращения, а последние должны выбираться исходя из условия обеспечения необходимой работоспособности регулятора. Сила, развиваемая грузами, должна быть достаточной для преодоления сил сопротивления передвижению рейки топливных насосов. В противном случае силы нелинейного трения, а также силы сопротивления, обусловленные процессом топливоподачи в момент передвижения рейки будут препятствовать ее перестановке, внося замедление и ошибки в процесс регулирования.
Читайте также: Гидроаэродинамика парусного судна
Таким образом, величина Tr2 и усилия, преодолеваемые муфтой регулятора скорости, практически определяют пределы улучшения показателей переходных процессов системы прямого регулирования.
Как известно, увеличение частоты вращения грузов центробежного измерителя в пределах, обеспечивающих надежную работу, позволяет уменьшить величину Tr2 при той же приведенной силе грузов и поэтому является одним из путей улучшения показателей переходных процессов.
Сделанные выводы могут быть распространены и на случай регулятора с упруго-присоединенным катарактом.
Известным способом улучшения показателей переходных процессов в дизель генераторах служит применение регуляторов непрямого действия, в которых величина Tr2 во много раз меньше, чем в регуляторах прямого действия.
Адаптивные системы
Адаптивными называются системы, которые обеспечивают самоприспосабливание объекта к измененным условиям эксплуатации. Иное название этих систем — самоприспосабливающиеся.
Существующие системы стабилизации или следящие системы реализуют П, И и Д законы регулирования, которые позволяют обеспечить требуемые качества регулирования в соответствии с законом. Однако изменение внешних условий работы объекта или других параметров, влияющих помимо основных возмущений на поведение объекта, требует создания такой Интегрированные системы управления судоходствомсистемы управления, которая позволила бы во всех случаях получить значение регулируемой величины, близкое к оптимальному. Это выполняют адаптивные системы. Адаптивные системы можно подразделить на два класса поисковые и аналитические. В основе поисковых систем лежит либо устройство, запоминающее экстремум искомой функции, либо устройство, реагирующее на знак и величину производной.
Схема адаптивной системы 1-го типа представлена на рис. 3.
При поиске на запоминающее устройство ЗУ приходит регулируемая величина, которая изменяется под действием управляющего воздействия u. Текущее значение регулируемой величины х запоминается и сравнивается с предыдущим xз.у.. Когда б = xз.у. – х будет равна нулю, то это означает, что регулируемая величина достигла максимума, а если б становится меньше нуля, то это приводит к реверсу с помощью реверсивного устройства РУ исполнительного механизма ИМ и к изменению знака приращения u. В результате происходят колебания системы около экстремальной части, амплитуда которых должна удовлетворять требованиям заданной точности.

В состав аналитических систем могут включаться электронные вычислительные машины, в функции которых входит выработка значений регулируемой величины по заданному алгоритму в зависимости от возмущающего воздействия.
На рис. 3 б представлена схема аналитической адаптивной системы с идеальной моделью. Идеальная модель сохраняет свои свойства и выходной сигнал с идеальной модели Xм строго отвечает задающему воздействию. В то же время реальная система может изменять свои свойства и сигнал на ее выходе X может изменяться появление отклонения X от Xм приводит к воздействию исполнительного механизма ИМ на систему и сигнал X изменятся до тех пор, пока разность X и Xм не уменьшится до заданного значения.
В качестве примера адаптивной системы управления дизелем рассмотрим возможную схему управления углом опережения подачи топлива φon. Величина φon является одним из главных факторов, влияющих на удельный эффективный расход топлива вe. С увеличением Процессы в системе автоматического регулирования скорости дизеля с турбонаддувомчастоты вращения судового дизеля для снижения ве величину φon целесообразно увеличивать, так как при этом большая часть топлива сгорает в фазе кинетического сгорания. При каждом значении п оптимальное значение φon также зависит от величины цикловой подачи вц (т.е. от нагрузки) поэтому необходимо спроектировать такую адаптивную систему, которая бы обеспечивала поиск оптимального значения φon при различных изменяющихся значениях n и вц. Контрольным параметром эффективности такой системы при постоянных значениях n и нагрузки могла бы служить минимальная величина секундного расхода топлива q, которая относительно просто регистрируется приборами. Схема системы с запоминающим устройством ЗУ реверсивным устройством РУ соответствует схеме на рисунке. Величина φon не должна превышать значений, при которых максимальное давление в цилиндре и концентрация оксидов азота выше предельных значений, что является ограничением для выбора φon.
В качестве исполнительного механизма для изменения сроп в автомобильных и тракторных двигателях находят применение муфты с изменяемым углом между двумя полумуфтами, одна из которых соединена с приводом топливного насоса, а другая — с коленчатым валом дизеля, а также системы уравнения поворотом втулки плунжера или ее ходом. На судовых дизелях находят применение электронно-управляемые форсунки различной конструкции.
На рис. 4 представлена (в горизонтальном положении) электронно-управляемая форсунка, в которой момент начало подачи топлива зависит от электрического сигнала управления.
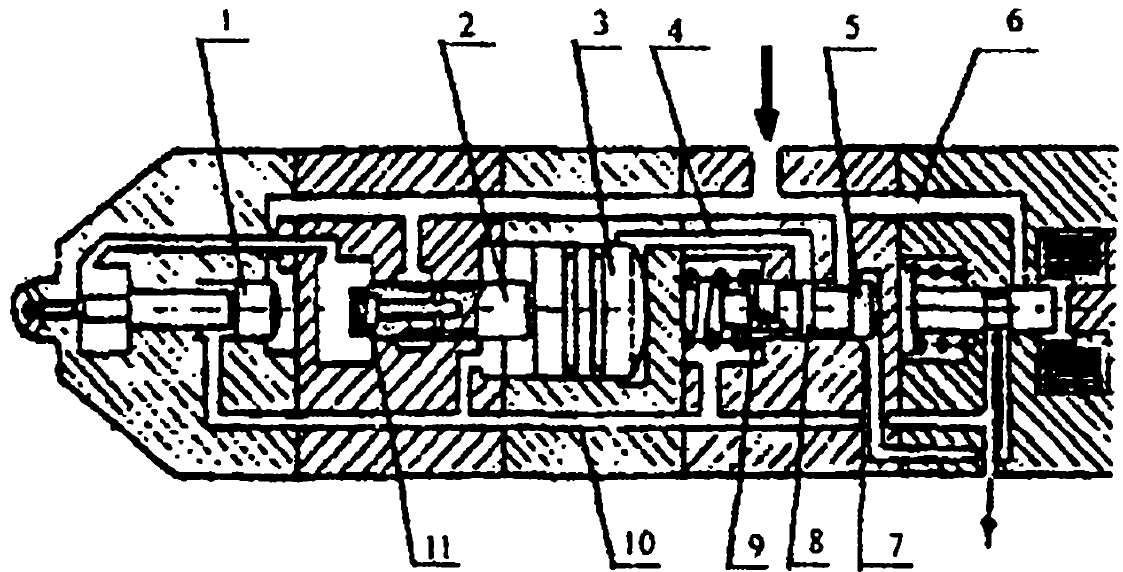
1 — нагрузочный поршень иглы; 2 — нагнетательный плунжер; 3 — приводной поршень; 4 — пружина; 5 — золотник; 6 — магистраль среднего давления; 7 — управляющая полость; 8 — управляющий поясок; 9 — паз; 10 — магистраль низкого давления (слив)
а)Электроуправляемая насос-форсунка с гидравлическим приводом
Для работы привода в системе использован источник среднего давления с аккумулятором, питаемым насосом среднего давления. В насосах-форсунках с гидравлическим приводом имеются магистрали среднего 6 и низкого (на сливе) 10 давления. Высокое давление для впрыскивания топлива создается насосом-мультипликатором, состоящим из приводного поршня 3 и плунжера 2 имеющим диаметр в несколько раз меньше, чем диаметр поршня. Игла форсунки запирается силой, создаваемой поршнем 1, который постоянно соединен с магистралью среднего давления 6. По магистрали среднего давления топливо поступает к управляющему клапану, золотнику 5, плунжеру 2 и к поршню 1 иглы форсунки. При закрытом управляющем клапане золотник 5 также закрыт и топливо через каналы в плунжере 2 и обратный клапан 11 заполняет пространство под плунжером и перед иглой распылителя. При включении электромагнита управляющий клапан поднимается и открывает канал соединяющий магистраль среднего давления 6 и управляющую полость 7 золотника 5. Золотник 5 имеет дополнительный усилительный каскад состоящий из двух кромок 8 открывающими и закрывающими каналы с проходным сечением в пять — восемь раз больше, чем у управляющего клапана. Это необходимо для управления гидроприводом подачи топлива. Под действием давления топлива золотник 5 перемещается вниз, своей нижней кромкой на пояске 8 закрывает слив из рабочей камеры приводного поршня 3 через паз 9. Верхней кромкой пояска 8 золотник 5 открывает подачу топлива из магистрали среднего давления 6 в рабочую камеру поршня 3. Поршень 3 вместе с плунжером 2 начинает движение вниз, клапан 11 закрывается, и в камере под плунжером 2 создается высокое давление топлива, которое больше давления в магистрали среднего давления в соответствии с действительным коэффициентом мультипликации, определяемым отношением площадей поршня и плунжера. При достижении давлением топлива в полости под иглой давления открытия иглы она поднимается, и начинается Средства автоматизации главных энергетических установоквпрыскивание топлива.
При выключении электромагнита управляющий клапан под действием пружины возвращается в исходное положение и соединяет полость 7 с магистралью слива 10. Золотник 5 под действие пружины возвращается в исходное положение и своей верхней кромкой пояска 8 перекрывает подачу топлива из магистрали 6 в рабочую полость поршня 3, а нижней кромкой пояска соединяет рабочую полость 3 поршня через паз 9 с магистралью слива. При этом на нижний торец нагнетательного плунжера 2 действует давление топлива, поступающего через обратный клапан 11 из магистрали среднего давления 6. В результате плунжер 2 и поршень 3 поднимутся в исходное верхнее положение. Подача топлива прекратится.
Наличие цепочки последовательно действующих инерционных и запаздывающих звеньев в системе управления и собственно приводе создает ощутимое запаздывание в формировании характеристики впрыскивания топлива насос-форсунками такого типа. Это снижает их возможности управления характеристикой впрыскивания.
Возможность независимого управления давлением топлива на входе в насос-форсунку, а следовательно, и давлением впрыскивания существенно расширяет функциональные возможности топливных систем с гидроприводными насос-форсунками. Системы с гидроприводными насос-форсунками имеют наибольшие функциональные возможности, но по конструктивным характеристикам являются достаточно сложными. В такой форсунке электромагнитный клапан имеет нормально закрытый затвор, открываемый при срабатывании электромагнита. Клапан находится на сливе из управляющей камеры форсунки. Топливо под давлением из аккумулятора подается в канал впрыскивания и канал управления. При закрытом управляющем клапане давление топлива в управляющей камере и камере распылителя одинаковое. За счет разницы площадей при закрытом управляющем клапане обеспечивается закрытие и удержание иглы, а при открытии клапана игла поднимается вверх. Давление впрыскивания устанавливается непрерывным регулированием давления в аккумуляторе микропроцессорным управляющим устройством.
б)Аккумуляторная топливная система с электрогидравлическими форсунками
В представленной на схеме (рис. 5) форсунке электромагнитный клапан имеет нормально закрытый затвор и топливо из аккумулятора давления поступает через дроссели к нагрузочному поршню иглы и в пространство перед иглой. За счет разницы площадей нагрузочного поршня и иглы, наличия пружины, которая также запирает иглу, последняя закрыта и подача топлива в цилиндр дизеля не происходит. При поступлении сигнала от микропроцессорного устройства на электромагнит, клапан поднимается и открывает канал для слива топлива из пространства над нагрузочным поршнем иглы форсунки. За счет сопротивления дросселя в пространстве над иглой падает давление и игла поднимается вверх за счет давления под иглой. Начинается Процессы топливоподачи в СДВСпроцесс подачи топлива в цилиндр дизеля. После выключения электромагнитного клапана давление в пространстве над иглой увеличивается, вследствие прекращения слива топлива и растет до давления на входе в форсунку. Давление топлива в кармане распылителя за счет дросселя снижено относительно давления на входе и в результате сумма сил, действующая на иглу, становится достаточной для начала движения иглы к седлу. Процесс подачи топлива прекращается.

Данная система позволяет управлять началом подачи топлива в цилиндр дизеля, а также продолжительностью впрыска, за счет изменения продолжительности импульса на электромагнитный клапан с помощью задатчика.
Фаза управляющих импульсов устанавливается в соответствии с сигналами датчиков положения распределительного и коленчатого валов.
Это интересно: Принцип действия ТНВД со смешанным регулированием подачи
Давление впрыскивания устанавливается непрерывным регулированием давления в аккумуляторе микропроцессорным управляющим устройством, изменяющим производительность насоса высокого давления по сигналам датчиков давления.
Недостатки системы:
- Затруднены возможности повышения давления впрыска. Конструктивная сложность аккумуляторных топливных систем.





