Судовые промысловые механизмы представляют собой комплекс технических устройств, используемых на судах для осуществления промысловой деятельности в морских и океанических водах. Они включают в себя различные виды оборудования, начиная от сетевого и тралового оборудования до устройств для обработки и консервации улова. Основной целью этих механизмов является максимальная эффективность в процессе ловли и обработки рыбы, а также соблюдение норм безопасности и экологических стандартов.
Судовые промысловые механизмы подразделяются на несколько основных категорий в зависимости от вида промысла:
- траловые системы;
- сетевые комплексы;
- ловильные устройства для лова рыбы с поверхности воды и с борта судна;
- а также специализированные механизмы для обработки и хранения улова.
Эти технические средства существенно повышают производительность и эффективность судов в рыболовстве, что является важным аспектом в поддержании устойчивости и прибыльности данной отрасли морского хозяйства
Для подъема и спуска якорей, шлюпок, забортных трапов, для перекладки руля, выполнения грузовых, швартовных и буксирных работ применяют палубные механизмы. Палубные механизмы представляют собой самостоятельную группу механического оборудования, не обслуживающую энергетическую установку судна. Свое название Палубные механизмы и устройства корпусапалубные механизмы получили от того, что они устанавливаются на палубах, вне машинно-котельных отделений. В состав палубных механизмов входят:
- механизмы рулевого устройства и механизмы якорно-швартовных;
- грузоподъемных и буксирных устройств.
Механизмы pyлевых устройств
Рулевое устройство (рис. 1) обеспечивает судну управляемость и состоит из четырех дополняющих одна другую частей, каждая из которых выполняет определенное назначение.
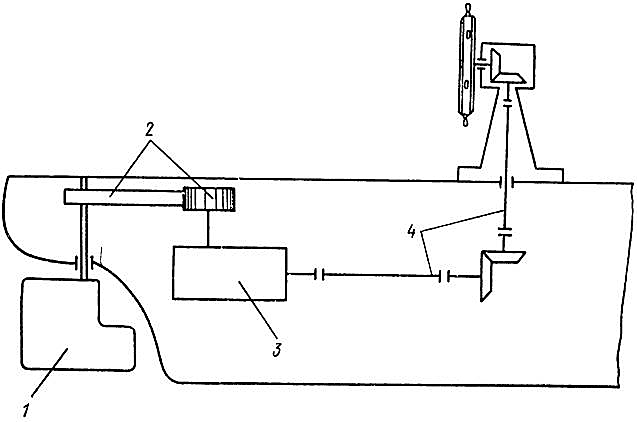
Руль 1 воспринимает давление воды и изменяет направление движения судна. Рулевой привод 2 связывает руль с рулевой машиной и передает вращающий момент, необходимый для поворота баллера. Рулевые машины на судахРулевая машина (двигатель) 3 создает усилие и обеспечивает работу рулевого привода. Телединамическая передача (телемотор) 4 связывает рулевую машину с постом управления судна.
Рулевые приводы подразделяются на две группы:
- приводы с гибкой связью (штуртросные, цепные);
- и проводы с жесткой связью (зубчатые, гидравлические, винтовые).
Рулевые машины могут быть:
- ручными;
- паровыми;
- электрическими;
- и электрогидравлическими.
Ручные рулевые машины устанавливают на маломерных судах. Паровые рулевые машины распространены на паровых судах. Широкое распространение на всех судах получили электрические рулевые машины. При больших значениях вращающего момента, возникающего на Рулевые устройства судна. Дефектация и ремонтбаллере руля при перекладке (на БМРТ, плавбазах), применяют электрогидравлические рулевые машины.
Телемоторы бывают:
- механические (валиковые, стержневые, тросовые);
- электрические;
- и гидравлические.
Наиболее часто встречаются электрические и гидравлические телемоторы.
Рассмотрим принципиальные схемы рулевых устройств с различными рулевыми приводами, рулевыми машинами и телемоторами, применяемые на Промысловые добывающие и перерабатывающие судапромысловых судах.
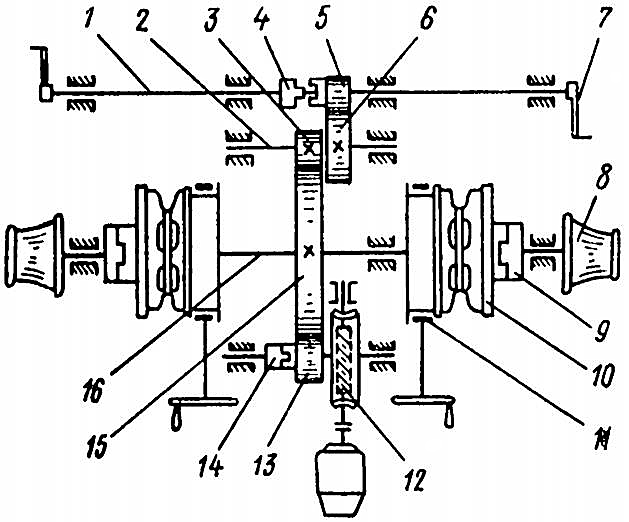
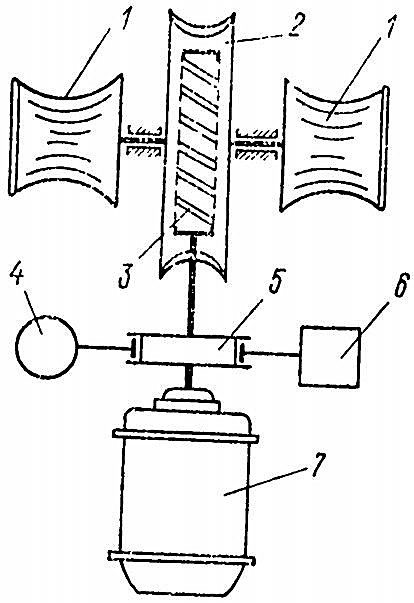
На рис. 2 показано рулевое устройство с зубчатым секторным приводом, ручной рулевой машиной и валиковым телемотором, устанавливаемое на СРТ.
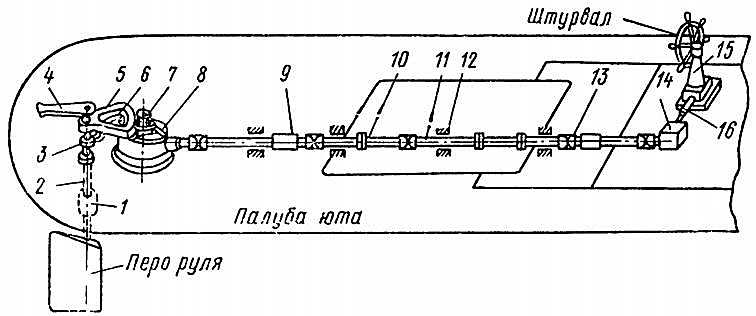
Ручная рулевая машина состоит из штурвала и тумбы 15, внутри которой помещен вертикальный вал, соединяющий при помощи двух пар конических шестерен вал штурвала с карданным валом 16 привода. Вал 16 через конический редуктор 14 соединен с валопроводом, состоящим из валиков 11, связанных фланцами 10. Валопровод уложен в подшипниках 12. Для предотвращения заклинивания валиков в подшипниках при деформациях корпуса судна в систему валопровода включены шарниры Гука 13 и продольнокомпенсирующая муфта 9. Валопровод соединен с червячным редуктором 5, на выходном валу которого закреплена цилиндрическая шестерня 7, входящая в зацепление с зубчатым сектором 5, свободно посаженным на баллере 2. Румпель 3 закреплен на баллере шпонкой и соединен с сектором посредине буферных пружин 6, предохраняющих привод от ударных нагрузок, возникающих в результате действия волн на перо руля. Руль соединяется с баллером муфтой 1. В нижней части руль опирается на подпятник ахтерштевня.
Направление движения судна (курс) изменяют вращением штурвала рулевой машины.
В случае выхода из строя рулевого привода управление судном осуществляется при помощи румпеля 4 аварийного рулевого устройства. Перекладка руля производится с помощью румпель-талей, закрепляемых в кормовой части судна за рымы, специально предусмотренные для этой цели.
Рулевое устройство с зубчатым секторным приводом, электрической рулевой машиной и электрическим телемотором показано на рис. 3.
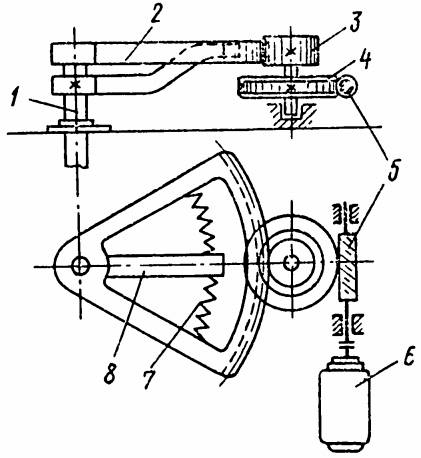
С ходового мостика команда (импульс) через электрическую дистанционную систему (телемотор) передается на электродвигатель 6, который начинает вращаться в ту или другую сторону. Электромотор через передачу, состоящую из червяка 5 и червячной шестерни 4, вращает цилиндрическую шестерню 3. Шестерня 3 входит в зацепление с зубьями сектора 2, свободно посаженного на баллер 1. Вращение шестерни вызывает поворот зубчатого сектора, который, воздействуя через буферные пружины 7 на румпель 3, осуществляет перекладку руля.
На рис. 4 изображена схема рулевого устройства транспортного рефрижератора типа «Яна», у которого рулевой привод, рулевая машина и телемотор – гидравлические.
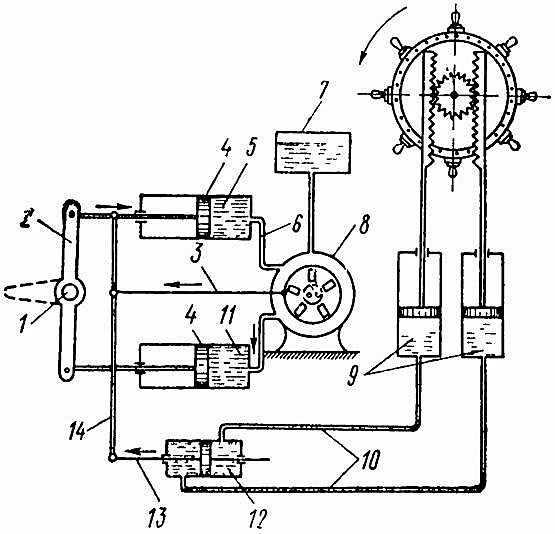
Румпель 2, посаженный на баллере 1, шарнирно соединен со штоками поршней прессов 5 рулевого привода. Полости рабочих цилиндров прессов 5 и 11 трубопроводами 6 связаны с насосом 8 рулевой машины, получающим привод от электродвигателя. Телемотор состоит из датчиков 9, установленнных в рулевой рубке, и приемника 12, находящегося в румпельном отделении. Датчики и приемник связаны трубопроводами 10. Шток 13 приемника связан с рычагом 14, верхний конец которого шарнирно соединен со штоком пресса 5. К этому рычагу прикреплен левый конец тяги 3 управления насосом. Для компенсации утечек жидкости из насоса и из прессов привода предусмотрен бачок 7.
Насос 8 рулевой машины устроен таким образом, что дает возможность при одной и той же частоте вращения (от электродвигателя) подавать жидкость в разных направлениях и с различной производительностью (либо к прессу 5, либо к прессу 11) в зависимости от положения тяги 3.
При повороте штурвала, например, против часовой стрелки поршень приемника 12 будет перемещаться влево и отклонять влево нижний конец рычага 14. В результате тяга 3, перемещаясь влево, установит регулирующий орган насоса 8 в такое положение, что насос начнет отсасывать жидкость из полости пресса 5 и нагнетать ее в полость пресса 11. Поршни 4, перемещаясь в разные стороны, разворачивают румпель 2; происходит перекладка руля. Вместе с верхним поршнем 4 вправо будет перемещаться верхний конец рычага 14, который через тягу 3 стремится установить регулирующий орган насоса в первоначальное (нейтральное) положение.
Когда поворот штурвала закончится, тяга 3 установит регулирующий орган насоса в нейтральное положение и перекладка руля прекратится. Если продолжать поворачивать штурвал, то шток 13 и нижнее плечо рычага 14 будут отклоняться вместе с тягой 3 влево и руль, как мы выяснили ранее, будет перекладываться.
При повороте штурвала по часовой стрелке тяга 3 переместится вправо и насос начнет перекачивать жидкость из полости 11 в полость 5. Руль будет перекладываться в обратную сторону. Такая система управления называется следящей.
Обслуживание механизмов рулевых устройств и требования к ним Регистра России. При обслуживании рулевых устройств необходимо руководствоваться «Правилами обслуживания вспомогательных механизмов и ухода за ними», а также рекомендациями заводов-изготовителей.
Рулевое устройство и авторулевой суднаРулевое устройство должно быть в полной исправности к моменту выхода судна в рейс. Рулевую машину приготовляют к действию по указанию вахтенного помощника капитана. При подготовке необходимо тщательно осмотреть рулевой привод и телемотор, чтобы убедиться в их исправности, а также удостовериться в отсутствии предметов, мешающих передаче вращения от рулевой машины или рулевого штурвала. Следует согласовать показания дистанционных аксиометров с показаниями аксиометра па рулевом приводе (в румпельном отделении).
У секторного или механического винтового привода нужно обратить особое внимание на состояние шестерен, червяков и червячных колес. При наличии поломок или трещин в зубьях работа рулевого привода запрещается.
В электрогидравлической рулевой машине проверяют уровень масла в расширительном бачке, действие привода и возможность перехода с основного привода на запасной и обратно, а также плотность соединений и отсутствие пропусков рабочего масла в системе. Пробными пусками проверяют действие рулевого устройства и согласованность действия всех узлов. Замеченные ненормальности в работе устраняют.
На ходу судна вахтенный два-три раза за вахту проверяет работу рулевой машины, чтобы убедиться в отсутствии шумов, стуков, нагревания подшипников, а также в наличии смазки. Если трущиеся части машины нагреты сверх нормы, то выделяют самостоятельного вахтенного для наблюдения за рулевым устройством.
Вывод электрической и гидравлической рулевых систем из действия производится путем отключения питания электродвигателя.
При необходимости ремонта рулевой машины в море надо предварительно разобщить машину с рулевым приводом или взять румпель руля на стопор, чтобы машина не могла получить движение в результате удара волны о перо руля.
Согласно действующим Правилам Регистра России рулевое устройство должно иметь три привода:
- основной;
- запасной;
- и аварийный;
которые должны действовать независимо один от другого. Основной рулевой привод позволяет осуществлять непрерывную перекладку руля с борта на борт при максимальной скорости переднего хода (ПХ) в течение не менее 10 мин; время перекладки руля с 30° одного борта на 30° другого борта не должно превышать 28 с.
Запасной рулевой привод должен обеспечивать непрерывную перекладку руля с борта на борт в течение не менее 10 мин при скорости, равной половине максимальной скорости судна, но не менее 7 уз; время перекладки руля с 20° одного борта на 20° другого борта должно быть не более 60 с. Запасной рулевой привод может быть ручным на судах, где диаметр головы баллера руля не превышает 355 мм и перекладка руля с борта на борт осуществляется усилиями не более четырех человек. Допускаемое усилие на рукоятку штурвала не должно превышать 16 кгс. В других случаях запасной рулевой привод действует от источника энергии.
Переход от основного рулевого привода к запасному должен выполняться в течение не более 2 мин. Судно не снабжают запасным рулевым приводом, если основной привод состоит из двух агрегатов, способных действовать независимо один от другого. Аварийный рулевой привод должен обеспечивать перекладку пера руля с борта на борт при скорости хода не менее 4 уз; время такой перекладки руля Регистром не регламентируется.
При любом рулевом приводе, действующем от источника энергии, не допускается смещение руля из заданного положения под действием внешних сил. Ручной рулевой привод изготовляют самотормозящимся. В рулевом устройстве имеются ограничители поворота руля, допускающие его перекладку на каждый борт только до определенного угла. Эти ограничители, согласно требованиям Регистра, должны не допускать перекладку руля на угол более 36,5° от ДП и не иметь общих деталей с рулевым приводом. При установке активного руля по согласованию с Регистром угол перекладки руля может быть больше, чем при обычной рулевой машине (до 90°).
Инспекция Регистра запрещает выход судна в море (или ограничивает район плавания судна) при наличии следующих дефектов рулевого устройства:
- повреждении пера руля, поломках и трещинах в раме пера, петлях, пятке, баллере, румпеле, секторе;
- неисправностей телепередачи, препятствующих перекладке руля с нормальным усилием на голове баллера;
- отсутствии или неисправности запасного рулевого привод;
- трудности перевода управления с основного привода на запасной;
- трещин и изломов в зубьях передаточных шестерен.
Якорно-швартовные, грузовые и буксирные механизмы
Якорные и швартовные механизмы. Якорно-швартовные механизмы входят в состав якорного и швартовного устройств. Якорное устройство состоит из:
- становых якорей;
- якорных цепей;
- стопоров для крепления становых якорей по-походному;
- механизма для крепления и отдачи коренного конца якорной цепи и механизмов для отдачи и подъема становых якорей с якорными цепями, а также для удержания на месте судна при отданных становых якорях.
Швартовное устройство обеспечивает подтягивание судна к береговым или плавучим причальным сооружениям и надежное крепление к ним. В состав швартовного устройства входят:
- комплект тросов (швартовов) для швартовки;
- швартовное оборудование (клюзы, кнехты, утки, киповые планки, вьюшки);
- и швартовные механизмы.
На судах флота рыбной промышленности применяют:
- якорные;
- швартовные;
- и якорно-швартовные механизмы.
Конструктивно они делятся на три вида:
- брашпили;
- шпили;
- якорные и швартовные лебедки.
Приводы у них могут быть паровые, электрические или гидравлические. На российских рыбопромысловых судах распространены якорно-швартовные брашпили с электрическим приводом.
Кинематическая схема электроручного брашпиля, устанавливаемого на средних рыболовных траулерах, показана на рис. 5.
На грузовом валу 16 неподвижно закреплены приводная шестерня 15 и турачки 8, служащие для выбирания швартова. Рабочие звездочки 10 установлены на валу свободно, но могут включаться, т. е. соединяться с валом, при помощи кулачковых муфт 9. Рабочие (цепные) звездочки снабжены ленточными тормозами 11.
Грузовой вал получает вращение от электродвигателя через червячный редуктор 12 и пару цилиндрических шестерен 13 и 15. Шестерни посажены на валике редуктора свободно и включаются кулачковой муфтой 14. Ручной привод брашпиля состоит из рукояток 7, валика 1, шестерен 3, 5, 6 и промежуточного валика 2. Шестерня 3 промежуточного валика постоянно находится в зацеплении с шестерней 15. Шестерня 5 сидит на валике свободно. Для подъема якоря вручную муфту 4 включают, а муфту 14 выключают.
Для выбирания носовых швартовов обычно пользуются брашпилем. Кормовые швартовы выбираются шпилем; кроме того, кормовой шпиль можно использовать для подъема кормового якоря. Шпили получили свое название от того, что рабочий вал (или баллер) их всегда выполняется вертикальным. По конструктивному исполнению шпили подразделяются на баллерные и безбаллерные. У баллерных шпилей грузовой барабан закреплен на баллере, а привод вынесен отдельно. У безбаллерных шпилей привод размещен внутри барабана. Эти шпили более компактны и требуют меньшей площадки для размещения.
По способу установки шпили подразделяются на одно- и двухпалубные. Само название показывает, что в первом случае весь механизм шпиля устанавливают на одной палубе, а во втором случае привод выносится на палубу, расположенную ниже. Для привода шпилей применяются паровая машина, электро- и гидропроводы. Ручной привод используется обычно в качестве запасного и выполняет роль основного лишь у маломощных шпилей.
На рис. 6 показана схема электроручного баллерного однопалубного якорно-швартовного шпиля.
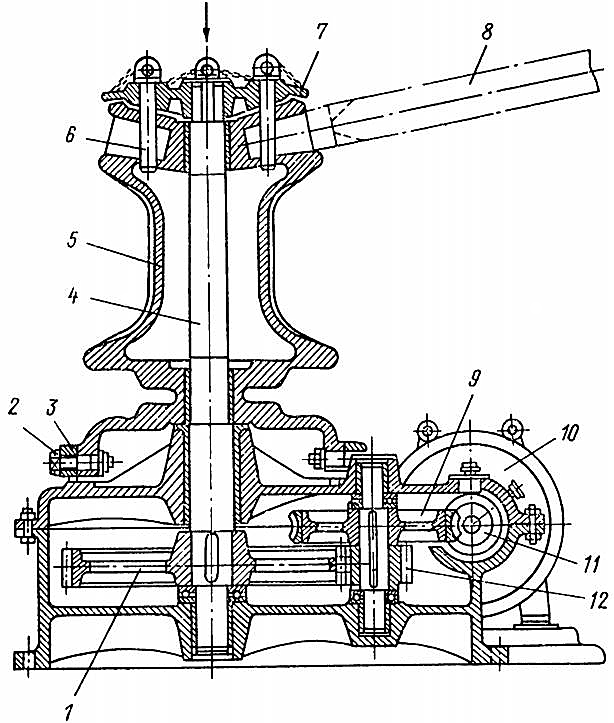
На баллере 4 неподвижно закреплен швартовный барабан 5, составляющий одно целое со звездочкой для якорной цепи. На валу электродвигателя 10 находится червяк 11, сцепленный с червячным колесом 9. На валу червячного колеса установлена шестерня 12, сцепленная с колесом 1, приводящим во вращение баллер. Вращение баллера 4 передается барабану 5 и звездочке, свободно надетым на баллер, через головку 7 и закладные штыри 6.
Ручной привод шпиля осуществляется от вымбовок 8. Для перехода на ручной привод нужно вынуть закладные штыри 6 и опустить палы 3, свободно посаженные на пальцах 2, так чтобы концы пал, упираясь в выемки на корпусе червячной передачи, препятствовали обратному вращению барабана и звездочки.
Обслуживание якорно-швартовных механизмов и требования к ним Регистра России. Перед приготовлением механизма к действию необходимо произвести его наружный осмотр, убедиться в исправности деталей и в отсутствии посторонних предметов, мешающих работе механизма. Необходимо отключить ручной привод, зажать ленточный тормоз, отключить цепную звездочку или барабан. Якорная цепь должна быть чистой и ровно лежать на звездочке.
После подготовки привода к действию производят пробные пуски механизма на холостом ходу. Если все исправно, цепная звездочка или барабан вводится в зацепление кулачковой либо фрикционной муфтой, и на мостик сообщают о готовности механизма к действию.
Во время работы электроприводного механизма необходимо следить за показаниями амперметра и за отсутствием шумов и стуков при паровом приводе. Состояние тормозов и их нагрев, а также смазку механизма периодически контролируют.
Если глубина стоянки превышает 50 м, отдают якорь с помощью привода брашпиля или шпиля, пока до грунта не останется 30 м. Дальнейшая отдача якоря, а также отдача его на глубинах менее 50 м происходит под действием веса якоря и якорной цепи на ленточном тормозе. Муфта сцепления цепной звездочки или барабана должна быть отключена. Подъем якоря производится при включенной цепной звездочке и ослабленном ленточном тормозе.
Инспекция Регистра ежегодно осматривает якорные и швартовные механизмы. Раз в четыре года производятся очередные классификационные осмотры, которые обычно приурочивают к постановке судна в док.
Перед каждым выходом в рейс необходимо проверять состояние якорного устройства и действие стопорных и тормозных приспособлений. При длительном бездействии (во время стоянки, промысла и на длительных переходах) брашпиль (шпиль) надо проворачивать без нагрузки. Износ якорных цепей не должен превышать 10 % по диаметру (калибру). В случае обнаружения на звеньях якорной цепи трещин или Ограждение открытых палуб фальшбортами, леерами и волноотбойниками и подвижные соединенияослабления контрфорсов смычки с такими дефектами следует заменить.
Перед выходом судна в рейс швартовные механизмы должны быть смазаны и опробованы в действии. Они должны иметь исправные и надежно действующие тормозные и стопорные приспособления, не допускающие самопроизвольного стравливания швартовов. Если у стальных швартовных тросов обнаружены лопнувшие проволочки (более 10 % от их общего количества по длине троса, равной восьми диаметрам), тросы необходимо заменить.
Не разрешается выход судна в море при наличии неисправностей брашпиля, препятствующих подъему или отдаче якоря, при проскакивании звеньев якорной цепи на звездочке во время отдачи и подъема якорей, при неисправных ленточных тормозах, когда они недостаточно надежно зажимают цепные звездочки, при неисправных разобщительных муфтах, не обеспечивающих включение и выключение цепных барабанов.
Грузовые механизмы. К грузовым механизмам относятся:
- грузовые;
- шлюпочные лебедки и краны;
которые в сочетании со стрелами осуществляют подъем, наклонное и горизонтальное перемещение грузов и судового оборудования, орудий лова, а также погрузку-выгрузку промыслового снаряжения, рыбы и рыбной продукции.
Грузовые лебедки на современных судах выполняются с электро- или гидроприводом, а на паровых судах старой постройки — с паровым приводом.
Характеристиками лебедки служат ее грузоподъемность (в т) и скорость подъема груза (в м/с).
В зависимости от грузоподъемности лебедки выполняют:
- одно-;
- двух-;
- и трехскоростными.
Чем тяжелее поднимаемый груз, тем меньше скорость подъема.
Российские электроприводные лебедки обозначаются условно ЛЭГр, а пароприводные – ЛГСП с добавлением цифрового индекса. Например, ЛЭГр 5/3 означает, что лебедка – электрическая грузовая, двухскоростная, может поднимать груз 5 и 3 т (в системе СИ соответственно 49 и 29,4 кН).
Схема электрической грузовой лебедки большого морозильного траулера показана на рис. 7.
На грузовом валу 3 посажены грузовой барабан 4 с ленточным тормозом 5, оборудованным ложной педалью, приводное зубчатое колесо 2 и турачка 1 для выполнения вспомогательных операций. Электродвигатель 6 через муфту соединен со шлицевым валиком 11, на котором посажен подвижный блок из шестерен 8 и 10. Блок может перемещаться по шлицевому валику при помощи вильчатого рычага и рукоятки 9. Соединительная муфта электродвигателя одновременно служит шкивом для электромагнитного тормоза 7. На промежуточном валу 15 жестко закреплены шестерни 12 и 14 и приводная шестерня 13.
Пуск лебедки в ход производится включением электродвигателя. Одновременно ток поступает на электромагнитный тормоз, растормаживающий вал двигателя.
Лебедка обеспечивает два режима работы. При зацеплении шестерен 8 и 14 будет обеспечиваться меньшая скорость, но большая грузоподъемность, а при зацеплении шестерен 10 и 12 грузоподъемность уменьшится, но скорость подъема груза возрастет. Переключение скоростей можно осуществлять только при остановленной лебедке и отсутствии груза на гаке. Ленточный тормоз 5 служит для притормаживания грузового барабана во время работы лебедки. Электромагнитный тормоз 7 предотвращает обратное проворачивание лебедки в случае обесточивания электродвигателя.
Многие транспортные и производственные рефрижераторы вместо грузовых лебедок оборудованы грузовыми поворотными кранами, которые имеют ряд преимуществ. При наличии кранов повышается производительность труда, появляется возможность принимать и опускать груз в любую точку трюма, обеспечивается быстрая готовность к действию.
Поворотные грузовые краны получили свое название в связи с тем, что они могут поворачиваться вокруг своей оси. В частности, российские краны выполняются на угол поворота от 220 до 420° или на неограниченный угол поворота.
Современные поворотные грузовые краны – электро- и гидро- приводные и оборудованы обычно тремя механизмами:
- поворота крана;
- изменения вылета стрелы;
- и подъема груза.
Вылет стрелы достигает 12-16 м, грузоподъемность 10-60 кН (1-6 т).
Схема механизмов электрического грузового поворотного крана, применяемого на некоторых производственно-транспортных рефрижераторах, показана на рис. 8.
На литой фундаментной плите 11, крепящейся к набору корпуса, неподвижно установлен баллер 2. Вокруг баллера может вращаться на катках 7 поворотная платформа 14. На поворотной платформе с помощью пальцев 12 шарнирно закреплены стрела 13 с постоянным вылетом, механизм подъема груза, механизм поворота и кабина 3. Так как стрела имеет постоянный вылет, который определяется двумя оттяжками 1, механизм изменения вылета отсутствует.
Механизм подъема конструктивно представляет собой обыкновенную односкоростную электрическую лебедку с электродвигателем 4, вращение которого передается через вал 15, червяк 17 и червячную шестерню 16 грузовому валу 19, лежащему в подшипниках кронштейнов. На вал 19 жестко насажен барабан 18 с намотанным концом грузового шкентеля 20. Второй конец шкентеля через направляющие и грузовые блоки прикреплен к грузовому гаку.
Механизм поворота обслуживается электродвигателем 5, вращение от которого через червяк 6, червячное колесо 8 и вал 9 передается цилиндрической шестерне 10. Шестерня находится в зацеплении с круговым зубчатым венцом фундаментной плиты и при вращении, обкатываясь вокруг него, поворачивает платформу. Механизм поворота снабжен педальным тормозом.
Управление краном осуществляется двумя контроллерами, установленными на посту управления, размещенном в кабине.
Основное назначение шлюпочных лебедок – быстрый и безопасный спуск и подъем шлюпок. Спускаются шлюпки под действием собственного веса на тормозе, подъем производится на приводе.
Для обслуживания шлюпок весом до 5 кН (0,5 т) обычно применяют ручные лебедки, для подъема более тяжелых шлюпок – электроприводные лебедки с запасным ручным приводом.
По конструктивному исполнению шлюпочные лебедки подразделяются на:
- одно- и двухбарабанные;
- одинарные;
- и сдвоенные.
Одинарные лебедки обслуживают одну шлюпку, сдвоенные – две. Передачи в лебедках:
- зубчатые;
- цилиндрические;
- и червячные.
На рис. 9 дана кинематическая схема электрической двухбарабанной шлюпочной лебедки.
Вращение от электродвигателя 7 через соединительную муфту передается червяку 3, который вращает червячное колесо 2 и находящиеся на одном валу с ним барабаны 1 с намотанным шкентелем талей шлюпочного устройства. Соединительная муфта одновременно является шкивом ленточного тормоза 5. При подъеме шлюпки, когда электродвигатель работает, соленоид 4 удерживает ленту тормоза 5 в отжатом состоянии. Если по каким-либо причинам цепь обесточится, действие соленоида прекратится, груз 6 опустится и затянет ленту тормоза, барабаны остановятся.
Обслуживание механизмов грузовых устройств и правила их освидетельствования. Приготовление к действию любого грузоподъемного механизма начинается с внешнего осмотра, цель которого – проверка узлов и деталей механизма и выявление возможных неисправностей.
Если внешний осмотр подтвердил исправность механизма, производится подготовка его привода к действию.
Приготовленные к действию привод и механизм проверяют в работе на холостом ходу. При этом обращают внимание на:
- правильность укладки тросов на барабанах;
- исправность действия тормозных устройств, рычагов управления и переключения.
Во время работы грузовых лебедок или кранов вахтенный механик обязан осматривать работающий механизм не менее двух раз за вахту.
Частота вращения электрической лебедки регулируется плавным поворотом рукоятки контроллера. При выполнении реверса контроллер устанавливают в нулевое положение и плавно переводят в другую сторону лишь после остановки механизма. Опускают груз только при включенном электродвигателе. Если питание энергией внезапно прекратится, груз опускают на электротормозе путем его растормаживания вручную. Ленточный тормоз на грузовом барабане используется при неисправном электротормозе. По окончании грузовых операций механизм останавливают, муфты сцепления устанавливают в нейтральное положение и ленточный тормоз ослабляют.
Во время работы механизмов запрещается:
- чистить и обтирать движущиеся части;
- крепить гайки;
- выбирать слабину;
- замерять зазоры;
и выполнять другие ремонтные работы, которые могут привести к несчастным случаям.
Запрещается пользоваться лебедками, если:
- неисправны детали движения;
- расстроено парораспределение;
- неисправно тормозное устройство;
- сильно изношены зубья шестерен или имеются трещины в Российских деталях.
Механическая мастерская на суднеСудовые грузоподъемные механизмы и устройства в процессе эксплуатации подвергают периодическому освидетельствованию инспекций Регистра России: один раз в четыре года (полное освидетельствование). В промежутках между ежегодными освидетельствованиями инспекцией Регистра судовая администрация должна не реже одного раза в три месяца осматривать грузоподъемные механизмы и их детали. Результаты осмотра заносят в вахтенный журнал. В случае поломки механизма или отдельных его деталей производят внеочередное освидетельствование грузоподъемных механизмов. О допуске механизма к эксплуатации инспектор Регистра делает пометки в соответствующих документах.
При ежегодных освидетельствованиях производится внешний осмотр механизма и основных деталей устройства:
- грузовой стрелы, ее съемных деталей (грузового гака, блоков и др.);
- и несъемных деталей.
Опробование лебедки или крана осуществляется при рабочей нагрузке, причем проверяют действие:
- переключающих устройств;
- передаточных механизмов;
- тормозов;
- тросоукладчиков;
- стопорных устройств;
- и концевых выключателей.
Полное освидетельствование, помимо тщательного осмотра грузовой лебедки (крана) и всех деталей грузового снаряжения, включает также испытание под нагрузкой.
Статическое испытание состоит в подвешивании к гаку на 30 мин пробной нагрузки, превышающей рабочую на 25 % для стрел грузоподъемностью до 196 кН (20 т). К стрелам-тяжеловесам грузоподъемностью 196-490 кН (20-50 т) подвешивают добавочный груз весом 49 кН (5 т) и проверяют грузовое устройство путем подъема и опускания этого груза, а также поворота стрелы на оба борта. Кроме того, проверяют возможность поворачивания стрелы, для чего подвешивают к гаку у нока стрелы груз, на 10 % превышающий максимальную нагрузку, и поворачивают стрелу с грузом из диаметральной плоскости на правый и левый борта судна до отказа. Испытание проводят при расчетном угле наклона стрелы к горизонту не более 15° (для стрел грузоподъемностью 10 т и более – 25°).
Грузовые механизмы считают пригодными к эксплуатации, если в период испытания и при последующем освидетельствовании не будет обнаружено отклонений от спецификационных характеристик.
Лебедки и краны с гидравлическим приводом испытывают на максимально возможную нагрузку, которая может превышать рабочую нагрузку не более чем на 25 %. Максимальная безопасная рабочая нагрузка четко наносится буквами на видном месте поверхности:
- кранов;
- грузовых стрел;
- погрузочно-разгрузочных механизмов;
- и деталей грузовых устройств.
Буксирные лебедки. На морских буксирных, спасательных судах и ледоколах устанавливают специальные буксирные лебедки, предназначенные для выбирания буксирного троса и изменения длины его вытравленной части. Особенность этих лебедок состоит в том, что они снабжены автоматическим устройством для травления буксира при увеличении его натяжения и для выбирания – при ослаблении. Приводной электродвигатель имеет электрическую аппаратуру, которая с помощью контакторной системы вызывает соответствующее изменение вращающего момента электродвигателя при изменении натяжения буксирного троса. Такой автомат ослабляет рывки буксира в свежую погоду, предотвращая его обрыв.
На судах, оборудованных буксирными лебедками, буксир крепится не за гак, а за барабан буксирной лебедки. Емкость барабана буксирной лебедки обычно рассчитана на выбирание около 80 % длины всего буксирного троса. Для ровной укладки троса на барабан лебедку снабжают автоматическим тросоукладчиком.
Современные буксирные лебедки – электрические или с гидроприводом, паровые лебедки применяют редко.
На рис. 10 показана кинематическая схема электрической буксирной лебедки.
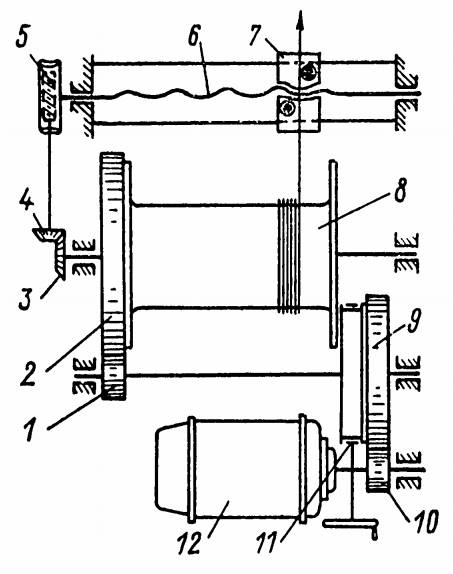
Электродвигатель 12 посредством двойной зубчатой передачи, состоящей из шестерен 10, 9 и 1, 2, при водит во вращение барабан 8, на который наматывается буксирный трос. На валу барабана насажена коническая шестерня 3, которая через коническую шестерню 4 и червячную передачу 5 приводит во вращение резьбовой валик 6 тросоукладчика. Во время работы лебедки каретка 7, между роликами которой проходит буксирный трос, попеременно перемещается вправо и влево, от одного конца барабана к другому. С помощью конической 3, 4 и червячной 5 передач скорость перемещения каретки 7 согласована со скоростью вращения, и витки троса будут ложиться на барабан ровно и вплотную один к другому.
Лебедка снабжена ленточным тормозом 11. Управление электродвигателем производится при помощи контроллера.
Промысловые механизмы
Назначение и классификация промысловых механизмов. Промысловые механизмы рыбодобывающих судов служат для замета, выборки орудий лова, подъема на палубу улова и промыслового вооружения, а также для механизации вспомогательных процессов.
По назначению промысловые механизмы можно разбить на три основные группы:
1 механизмы, предназначенные для тяги (выборки) канатов и тросов (сюда относятся траловые, сейнеровые, неводные лебедки и дрифтерные шпили);
2 механизмы, предназначенные для непосредственной выборки орудий лова, а именно:
- сетевыборочные машины;
- силовые блоки;
- неводовыборочные машины;
3 вспомогательное оборудование, предназначенное для механизации различных вспомогательных процессов всех видов лова (сюда можно отнести сететрясные машины, приводные ролы, машины для укладки вожака и т. д.).
Кроме того, промысловые механизмы различаются по роду двигателя:
- электрические;
- гидравлические;
- паровые.
Промысловые механизмы тралового лова. Траловый лов – один из самых распространенных видов активного морского рыболовства как в России, так и во всем мире.
Орудием тралового лова является трал – сетный мешок, буксируемый за судном с помощью двух стальных тросов – ваеров.
Трал, закрепляемый к двум ваерам, спускают за борт судна. Для его погружения ваеры вытравливают на длину, равную трем и более глубинам участка лова. Опущенный в придонные слои воды трал буксируется судном в течение 0,5-2 ч, в зависимости от плотности концентрации рыбы. Затем выбирают ваеры, подтягивая тем самым трал к судну, и поднимают его на палубу. Лов тралами ведут со специальных морских судов-траулеров с бортовым или кормовым тралением.
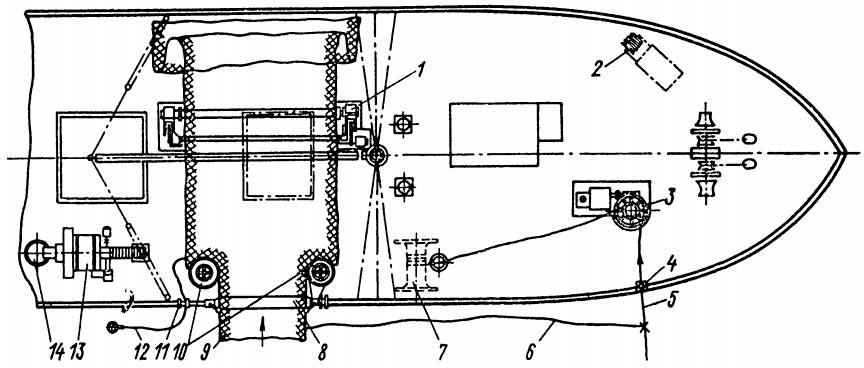
Большинство малых и средних траулеров имеет бортовую схему траления. Принципиальная схема расположения промыслового оборудования на таких траулерах показана на рис. 11, а.
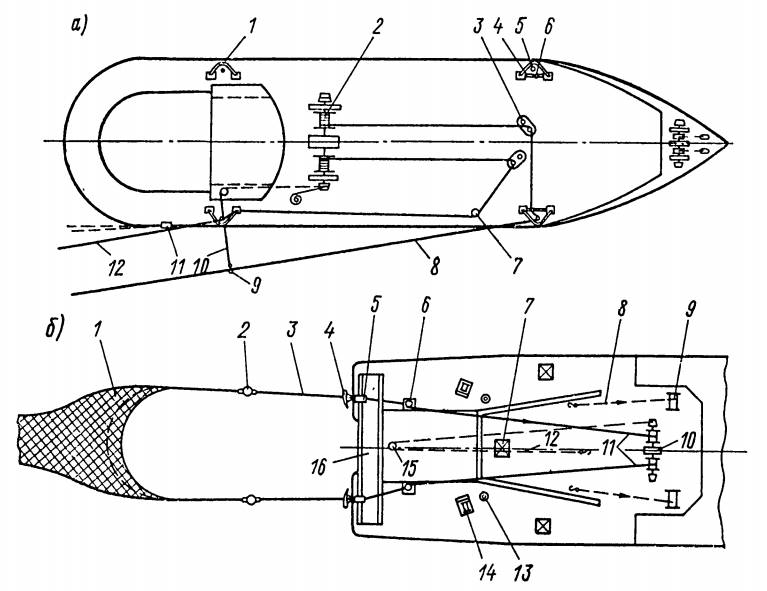
а – с бортовым тралением; б – с кормовым тралением
Траловая лебедка 2 установлена перед рулевой рубкой. Средняя часть палубы судна свободна для работы с тралом и обработки улова. Для удобства проводки ваеров 8 и 12 из-за борта на барабаны лебедки 2 на траулере предусмотрены четыре (по две с каждого борта) траловые дуги 1 и 4, на которых подвешены направляющие блоки 5 и 6; на палубе установлены ролики 3 и 7. При такой схеме траление можно производить как с правого, так и с левого борта.
Перед буксировкой трала, когда он опустится на нужную глубину, оба ваера при помощи дополнительного троса 10 с гаком 9 (мессенджера) турачкой лебедки подтягиваются к борту судна в одну точку и автоматически защелкиваются специальным приспособлением 11, называемым стопор-блоком. Это позволяет избежать попадания ваеров на гребной винт во время работы и обеспечить нормальную буксировку и правильное положение трала.
На больших морозильных траулерах на РТМ типов «Тропик» и «Атлантик» промысловая схема выполнена с кормовым тралением (рис. 11, б). Отличительной особенностью этих траулеров является наличие слипа в корме. В носовой части промысловой палубы установлена траловая лебедка 10. По бокам слипа размещены грузовые колонны 13 с грузовыми стрелами и электрические грузовые лебедки 14. Траловые дуги или заменяющие их кран-балки с подвесными роликами 5 расположены на корме под переходным мостиком 16. Перед пуском трал 1 растягивают по промысловой палубе перед лебедкой. К мешку трала крепится глаголь-гак со спускным тросом 12, проходящим через канифас-блок 15 на турачку лебедки. При помощи спускного троса трал стягивают по слипу в воду, где он подхватывается и вытягивается кильватерной струей. При подъеме трала оба ваера 11, проходящих через подвесные ролики 5 и направляющие ролики 6 по бокам слипа, выбираются на барабаны 9 лебедки. При подходе траловых досок к подвесным роликам их отсоединяют, и за кабели 3 подтягивают металлические пустотелые шары 2, способствующие перекатыванию трала через неровности грунта (клячевые бобинцы).
В зависимости от величины улова за мешок трала заводят один или два стопора 8 (удавкой вокруг мешка) и подтягивают улов по слипу как можно ближе к лебедке. Затем открывают люк 7 бункера, расположенного посередине рабочей палубы, и развязывают узел мешка. Рыба из мешка вытекает, и ее сталкивают в бункер рыбного цеха, расположенного под промысловой палубой.
Кормовое траление по сравнению с бортовым имеет ряд преимуществ, а именно:
- упрощается маневрирование судном при спуске и подъеме трала;
- улучшаются условия работы команды на возвышенной промысловой палубе, не захлестываемой волной во время шторма;
- ваера расположены симметрично оси судна, что позволяет буксировать трал при нулевом положении руля.
Траловые лебедки – основной промысловый механизм, обеспечивающий выполнение всех необходимых операций спуска-подъема трала и производство вспомогательных и грузовых работ, связанных с промыслом. Особенностью конструкции траловых лебедок является наличие у них двух свободно посаженных на грузовой вал ваерных барабанов и специальных приспособлений для равномерной укладки ваеров по длине барабанов-ваероукладчиков.
В зависимости от привода траловые лебедки могут быть:
- электрические;
- гидравлические;
- паровые;
- и с приводом от главного двигателя внутреннего сгорания.
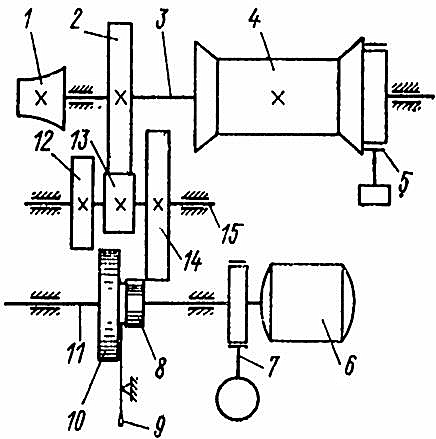
На рис. 12 показана кинематическая схема электрической траловой лебедки, установленной на СРТР типа «Океан».
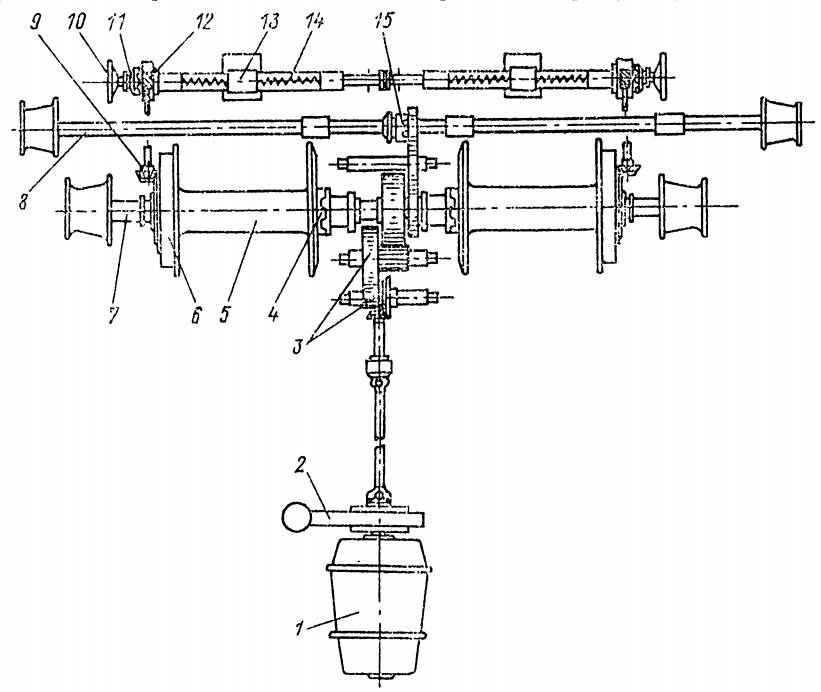
На грузовой вал 7 лебедки свободно посажены два ваерных барабана 5, которые включаются кулачковыми муфтами 4. Вращение от электродвигателя 1 на грузовой вал 7 и вспомогательный вал 8 передается через коническо-цилиндрический редуктор 3. Включается вспомогательный вал муфтой 15. Барабаны оборудованы ленточными тормозами 6, управляемыми маховичками; электродвигатель снабжен аварийным электромагнитным тормозом 2. Вращение нарезных валиков 14 ваероукладчиков обеспечивается от каждого ваерного барабана через конические 9 и червячные 12 передачи. Валики ваероукладчиков могут быть отключены от ваерных барабанов с помощью кулачковых муфт 11; в этом случае каретки 13 могут перемещаться вручную маховичками 10. Турачки, установленные па концах грузового и вспомогательного валов, могут быть использованы для выполнения вспомогательных операций при лове.
Перед пуском траловой лебедки необходимо:
- тщательно осмотреть вращающиеся части, чтобы там не оказалось посторонних предметов;
- убедиться в исправности кожухов ограждения для безопасности работы;
- наполнить и прожать масленки, убедиться в наличии достаточного количества масла в корпусах и ваннах;
- покрыть винт привода ваерной каретки толстым слоем тавота;
- застопорить ваерные барабаны тормозами, отключить их, дать пробный пуск двигателя.
Пуск электроприводной лебедки осуществляется путем медленного перевода рукоятки и маховика контроллера. Травление ваеров производится с помощью тормозов или электродвигателем.
При выбирании ваеров включают муфты ваерных барабанов, а ленточные тормоза растормаживают. Члены экапажа, управляющие траловой лебедкой, должны внимательно следить за движением ваера, слушать команды и сигналы, наблюдать за работой лебедки.
При обслуживании траловых лебедок с гидроприводом важную роль играет процесс заполнения установки маслом. Обычно система гидрофицированных механизмов (например, на ППР «Грумант») заполняется с помощью насоса. В начале заполнения системы открывают все пробки для выпуска воздуха, по мере заполнения системы маслом воздушные отверстия закрывают.
Во время эксплуатации гидроустановки необходимо контролировать уровень масла в аккумуляторе.
При попадании в систему воздуха во время эксплуатации, о чем будет свидетельствовать ослабление тяги лебедки и возникновение шума, его необходимо удалить.
Промысловые механизмы кошелькового лова. Кошельковый лов рыбы является активным видом промыслового рыболовства и имеет большие перспективы. Сущность лова состоит в том, что косяк рыбы окружают (обметывают) сетной стеной – кошельковым неводом длиной 350-800 м и высотой 50-70 м. Вдоль верхней и нижней кромок сетной стены крепят капроновые канаты, называемые подборами. К нижней подборе прикрепляют металлические кольца, сквозь которые проходит стяжной трос. После того как невод выметывается вокруг косяка рыбы, низ невода стягивают стяжным тросом. В результате рыба оказывается как бы в огромной сетной чаше – кошельке (рис. 13).
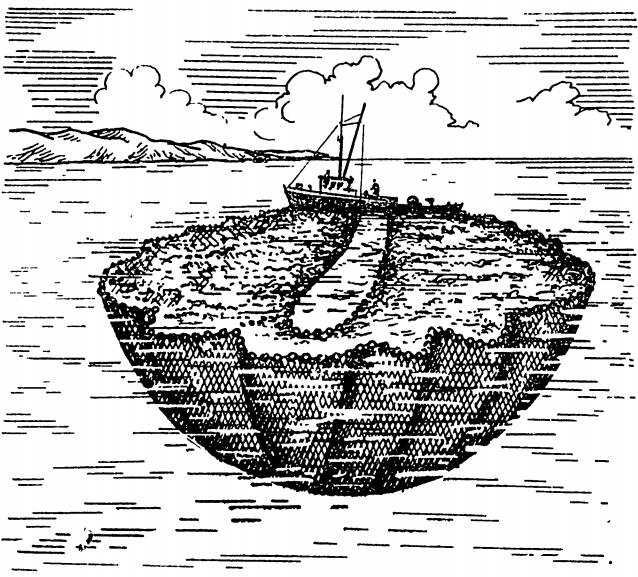
Затем невод подтягивают к борту судна и рыбу из него либо вычерпывают каплером (сетным сачком), либо подают на борт рыбонасосом.
Оборудование для кошелькового лова состоит из устройств и механизмов, облегчающих и ускоряющих процессы кошелькования, выливки рыбы, выбирания и укладки невода.
Лов рыбы кошельковыми неводами производится с сейнеров, а также с других судов, специально оборудованных для этой цели. На рис. 14 показана одна из возможных схем расположения промыслового оборудования на сейнере.
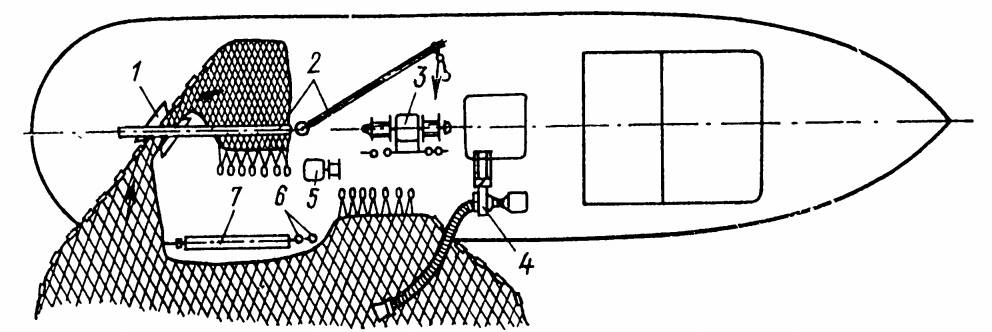
После замета невода оба конца стяжного троса выбирают одновременно при помощи турачек сейнерной лебедки 3. Стянув кольца, их вместе с нижней подборой поднимают на палубу. Конец сетной стены невода собирают в жгут с помощью лебедки и накладывают на силовой блок 1. Силовой блок представляет собой приводной барабан с клиновидным профилем, подвешиваемый на грузовую стрелу 2 над кормовой частью судна. Силовые блоки называют подвесными машинами выборки кошелька (ПМВК). Они приводятся в действие от электрического или гидравлического привода.
При работе по данной схеме после укладки «жгута» невода на силовой блок грузовую стрелу с подвесным блоком поднимают над палубой и, включив привод блока, производят выборку и укладку невода на палубе. Рыба из кошелька подается на палубу рыбонасосом 4. Приводной рол 7 облегчает подсушку невода. Стягивается невод в воду в начальный момент замета специальным устройством 5, которое канатом, пропущенным через роульсы 6, соединяется с пятным крылом невода.
Читайте также: Рыбопромысловый флот
На сейнерах более ранней постройки используется несколько иная промысловая схема. На корме судна в этом случае устанавливают поворотную площадку, на которой имеется сетевыборочная машина, представляющая собой две вертикально установленные приводные турачки, вращающиеся в разные стороны, между которыми в виде незамкнутой восьмерки закладывается «жгут» невода. Укладка невода после выборки такой машиной производится вручную и представляет собой трудоемкую операцию. Стягивается невод в воду в начале замета при помощи вспомогательной шлюпки.
Сейнерные лебедки предназначены для выборки урезов (каната, закрепленного к верхней подборе невода) и стяжного троса при кошельковании, а также для выполнения различных грузовых операций, необходимых для подъема частей невода на палубу и выливки улова. Они выполняются с электроприводом или с приводом от главного двигателя внутреннего сгорания. Рабочими органами лебедки служат турачки.
На рис. 15 изображена сейнерная лебедка с приводом от главного двигателя внутреннего сгорания, устанавливаемая на малых рыболовных сейнерах.
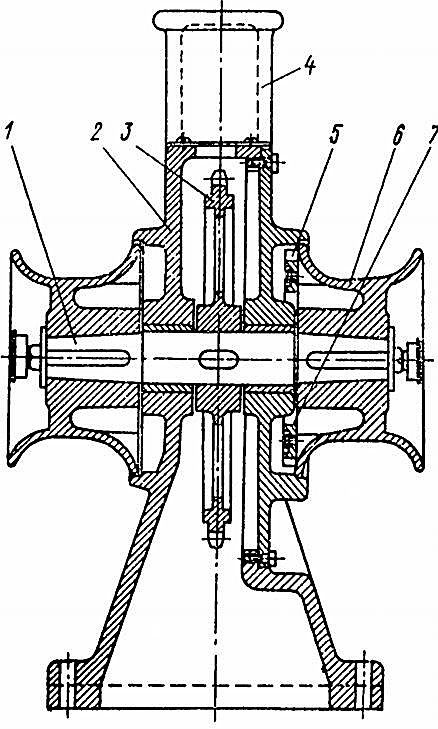
Корпус 2 лебедки представляет собой чугунную отливку, выполненную как одно целое с двумя вертикальными 4 и двумя горизонтальными трубами, что придает корпусу форму кнехта. На грузовом валу 1 установлены две турачки 6 и звездочка 3. Грузовой вал приводится во вращение через цепную передачу и механизм отбора мощности от главного двигателя. Во избежание проворачивания вала в обратную сторону при работе лебедки на правой турачке устанавливают храповик 5, который стопорится собачкой 7.
На рыбодобывающих судах постройки последних лет в связи с усиливающейся тенденцией к их универсализации применяют промысловую схему, которая позволяет вести и кошельковый и траловый лов. В этом случае устанавливают кошельково-траловые лебедки. Они выполняются с электро- или гидроприводом, снабжаются ваерными барабанами и турачками.
Эксплуатация механизмов кошелькового лова. Перед началом работы с сейнерной лебедкой, неводовыборочной машиной или силовым блоком следует удостовериться в их исправности во избежание несчастных случаев.
Перед пуском механизма в ход необходимо:
- обильно смазать трущиеся поверхности деталей движения (подшипники, шестерни), продавливая колпачковые масленки подшипников, и, если нужно, пополнить уровень масла в ванне редуктора;
- поставить маховик контроллера управления электропривода механизма в нулевое положение и через вахтенного штурмана подать в машинное отделение команду «Включить ток»;
- включить электродвигатель и провернуть механизм на холостом ходу;
- проверить действие тормозных устройств, муфт сцепления и дисковых фрикционных муфт регулирования тягового усилия.
Убедившись в исправности всех узлов механизма, можно приступить к работе.
В период работы механизма стрелы, направляющие роульсы и канифаса блоки должны быть под постоянным наблюдением. Все эти механизмы и устройства подлежат испытаниям в определенные сроки. Результаты испытаний заносят в шнуровую книгу.
При подвешивании силового блока к грузовой стреле необходимо помимо основного крепежного троса заводить дополнительно дублирующий трос.
Промысловые механизмы дрифтерного лова. Сущность дрифтерного лова состоит в том, что сети длиной 30-50 м и высотой 4-12 м соединяют вместе по 40-150 шт. в так называемый «порядок» и выметывают за борт, где они дрейфуют под действием морских течений, объячеивая встречную рыбу. В отличие от тралового и кошелькового, дрифтерный лов имеет «пассивный» характер; он используется в российском и зарубежном флоте в основном для промысла сельди.
На рис. 16 изображена схема дрифтерного порядка.
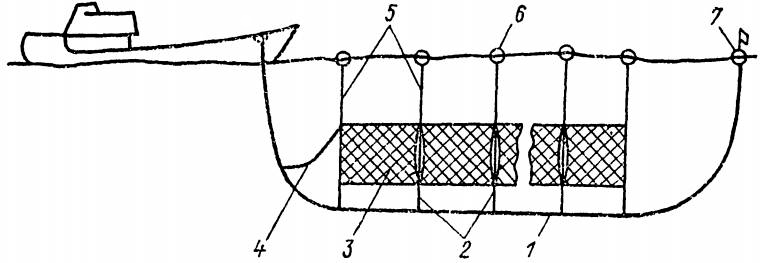
Общая протяженность порядка может составлять 1 200-4 500 м. Он состоит из дрифтерных сетей 3. Каждая сеть удерживается на плаву дрифтерными буями 6, с которыми она связана буйковыми поводцами 5. Нижние концы дрифтерных сетей связаны вожаковыми поводцами 2 с длинным канатом – вожаком 1, который соединяет порядок с судном. Конец порядка замыкается концевым резиновым надувным буем 7. Для подтягивания верхней или нижней подборы служит вспомогательный канат 4, называемый уздечкой.
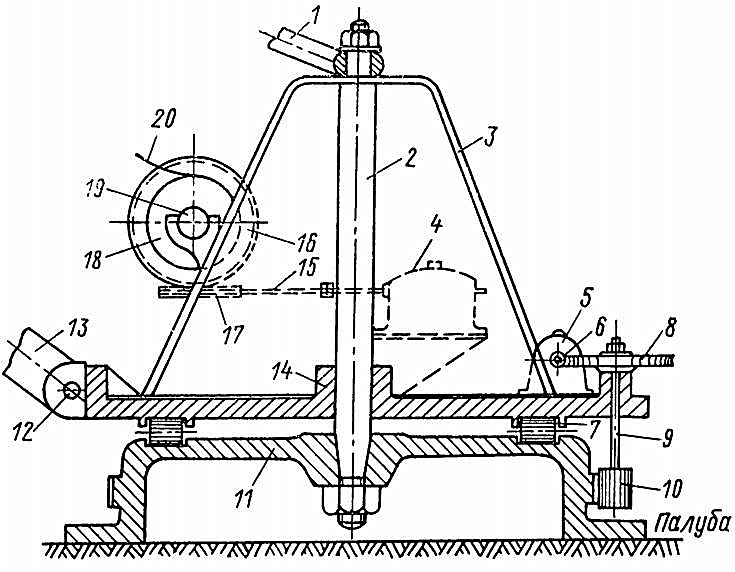
Расположение промыслового оборудования на судах дрифтерного лова представлено на рис. 17.
Для выборки вожака 5 на баке по правому борту судна установлен шпиль-автомат 3. Во время дрейфа в штормовую погоду стояночный конец вожака крепят на барабане шпиля-автомата, который автоматически регулирует натяжение вожака, предотвращая его обрыв и потерю дрифтерного порядка.
На некоторых судах вожак выбирается обычным неавтоматическим дрифтерным шпилем через мальгогер 4; автоматическая регулировка натяжения в этом случае осуществляется амортизатором вожака 2. Сходящий с барабана дрифтерного шпиля 3 вожак укладывается в вожаковом трюме на барабан вожакоукладочной машины 7. Дрифтерные сети 9 выбираются при помощи Промысловые устройства и механизмы рыболовных судовсетевыборочной машины 10 через приводной бортовой рол 8, с которым связан механизм 11 для выборки буйковых поводцов 12. Вожаковые поводцы 6 выбирают вместе с сетями.
Сетевыборочная машина состоит из двух вращающихся в разные стороны головок, смонтированных на специальных тумбах. В зависимости от конструкции головки машины бывают кулачковыми и ручьевыми. Принцип действия кулачковой головки состоит в том, что подбора сети зажимается кулачками, расположенными по окружности. Третья часть кулачков, проходя по участку дуги, расположенному против другой головки, оказывается в зажатом состоянии и удерживает подбору. Принцип действия ручьевой головки заключается в том, что подбора заклинивается в ручье головки.
После сетевыборочной машины сети с рыбой поступают на сететрясную машину 1, где рыба вытряхивается из сетей. Рабочим элементом сететрясной машины является трясущий орган, изготовленный из двух стальных тросов, натянутых между концами рычагов и покрытых брезентовым шлангом. От электродвигателя через редуктор и кривошипно-шатунный механизм трясущий механизм получает колебательные движения, в результате чего создается вибрация, обеспечивающая вытряхивание рыбы из сети. Вытряхнутая рыба направляется на посол в рыбопосольный агрегат 13. Смесь рыбы и соли выдается рыбопосольным агрегатом в бочки 14. Наполненные бочки закупоривают и спускают в трюм судна.
Эксплуатация механизмов дрифтерного лова. Дрифтерный шпиль перед пуском в ход необходимо несколько раз провернуть вручную. При выборе вожака на турачку шпиль должны обслуживать два человека:
- один поддерживает сходящий с турачки трос;
- второй находится у контроллера шпиля.
Сетевыборочная машина перед работой также должна быть проверена, смазана и опробована на холостых оборотах.
При выборе сетей необходимо:
- следить за правильным ходом сетей, не допускать перекоса;
- при появлении перекоса освободить подбору из-под кулачка (или заклинивающего ручья) опережающей сетевыборочной головки и после ликвидации перекоса продолжать выборку за обе подборы;
- если сеть полностью свалилась к одному концу рола, освободить подбору в противоположной головке, расправить сеть по ширине рола и только после этого продолжать выборку за обе подборы.
Сететрясную машину перед пуском проверяют, чтобы убедиться в отсутствии посторонних предметов и наличии смазки в редукторе. Перед началом тряски сетей необходимо проверить и при необходимости натянуть канатные трясуны; провернуть машину вхолостую, сначала при малой, а потом при полной частоте вращения.
После выборки сетей на палубу заправляют их в трясущий орган, концы подборы сетей передают укладчикам и пускают машину.
Промысловое оборудование китобойного судна. Промысел китов ведется со специальных судов-китобойцев, снабженных соответствующим промысловым оборудованием.
Схема расположения промыслового оборудования на китобойце показана на рис. 18.
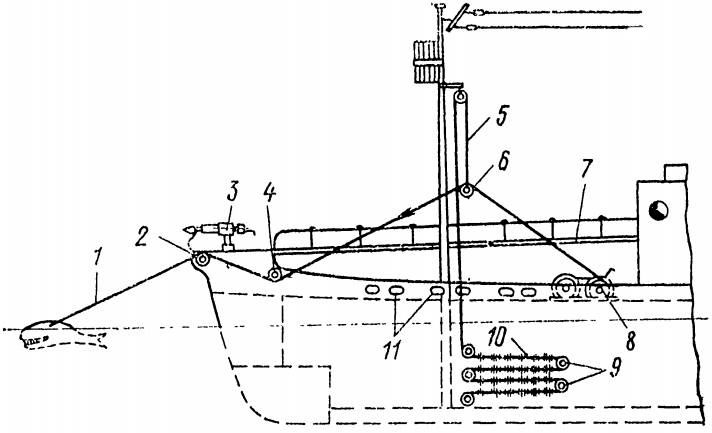
На носовой площадке установлена гарпунная пушка 3, заряжаемая гарпунами; между рулевой рубкой и носовой площадкой перекинут переходной мостик 7. На главной палубе находится спаренная промысловая лебедка 3, служащая для выборки гарпун-линя с убитым китом. В районе фок-мачты под палубой размещено амортизационное устройство 10, которое смягчает рывки загарпуненного кита.
После выстрела гарпун, попав в кита, натягивает гарпун-линь 1, идущий с барабанов лебедки 8 через амортизационный канифас-блок 6, палубный роульс 4 и носовой роульс 2. Амортизационный канифас-блок, подвешенный на тросе 5, в результате натяжения линя опускается, сжимая буферные пружины амортизатора 10, и смягчает рывок. Оси блоков 9 амортизатора закреплены на подвижных направляющих. Для крепления к борту и буксировки китовых туш в фальшбортах носовой палубы китобойца вделаны усиленные двойные клюзы 11.
При интенсивной охоте убитых китов подтягивают к борту китобойца, надувают воздухом от компрессора для придания плавучести, «ставят на флаг» и оставляют в море, а суда-буксировщики доставляют их к борту китобойной базы.
Китобойцы не имеют брашпиля, его место занято гарпунной пушкой. Якорная цепь выбирается специальной звездочкой шпиля, установленного на палубе у полубака.
Промысловые механизмы для лова рыбы с помощью электросвета. Искусственный свет оказывает влияние на рыбу:
- одни рыбы привлекаются светом;
- другие уходят от него;
- третьи прекращают свое движение и останавливаются в луче света и т. д.
Реакция рыбы на свет используется для целей лова.
Привлечение рыбы надводным освещением применяют при лове сайры на Дальнем Востоке.
Очень широко в промысле используется привлечение рыбы с помощью подводного освещения. Так, на Каспийском море основную массу рыбы (кильки) дает именно лов рыбонасосами с помощью подводного освещения. Быстрое распространение приобретает такой промысел с судов БМРТ и «Тропик» в водах Атлантики, где на свет вылавливают сардинеллу, сардинопса и других рыб.
Лов кильки на Каспийском море проводится следующим образом. С борта судна (рис. 19) опускают всасывающий шланг 2, на конце которого расположено залавливающее устройство 3 с двумя лампами 4 подводного освещения.
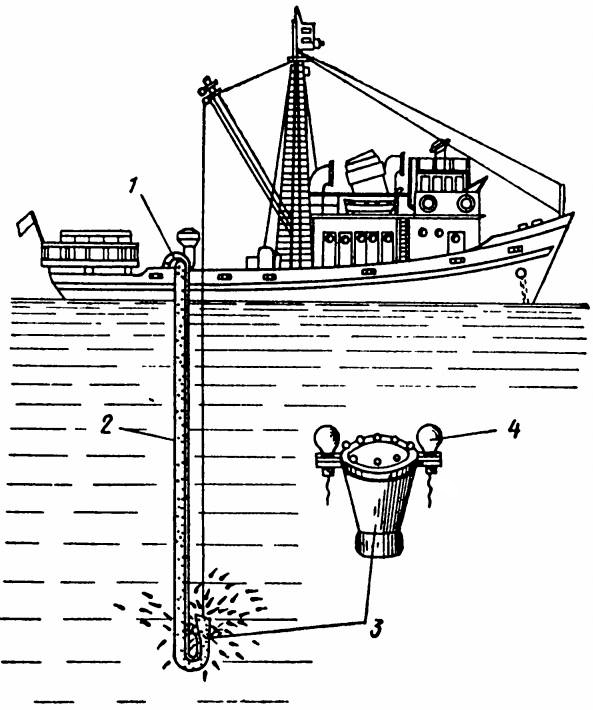
Рыба, собравшаяся на свет у ламп, засасывается рыбонасосом вместе с водой через залавливающее устройство и шланг и подается на палубу к водоотделителю.
При перекачивании центробежными рыбонасосами неизбежно повреждение некоторого количества рыбы. Поэтому в последнее время стали применять насосы-эрлифты, которые не имеют движущихся частей (рис. 20).
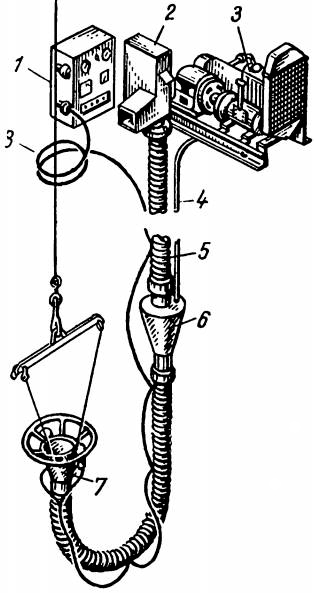
Эрлифтная установка, так же как рыбонасосная, имеет шланг 5, на одном конце которого установлено залавливающее устройство 7, а на другом – водоотделитель 2. Электрический ток к лампам подводится по кабелю 8 через распределительный щит 1. На некотором расстоянии от залавливающего устройства на шланге расположена смесительная камера 6, представляющая собой металлический баллон, куда компрессором 3, установленным на палубе или в машинном отделении, под давлением порядка 6-8 кгс/см2 по трубе 4 подается сжатый воздух. Из камеры воздух в виде пузырьков поднимается по шлангу вверх и расширяется. От этого плотность смеси вода – воздух уменьшается. По закону сообщающихся сосудов более плотная вода поступает извне в залавливающее устройство и вытесняет кверху легкую смесь, которая поднимается до палубы и выливается наружу. Вместе с водой в систему попадает привлеченная светом рыба и подается на судно. Вода уходит через водоотделитель, а рыба скатывается в бункер.
Техника безопасности во время промысла. Перед пуском в работу промысловых устройств необходимо тщательно осмотреть их, обратив особое внимание на состояние и крепление блоков и тросов.
Пуск промысловых механизмов на предельную скорость без нагрузки не допускается. При выбирании тросов с помощью турачек лебедку следует пускать малым ходом, пока не будет выбрана слабина троса и он не ляжет правильно на турачку, после чего скорость может быть увеличена. Расправлять орудия лова во время замета или траления на ходу судна категорически запрещается. Отдачу тросов со стопора или взятие на стопор нужно выполнять с соблюдением предосторожностей и при замедленном ходе судна.
При кормовом тралении после подъема трала на палубу и во время траления ворота слипа должны быть закрыты. Запрещается при тралении находиться на палубе в районе ваеров и на наклонной плоскости слипа, травить или выбирать ваера и отдавать ленточные тормоза траловой лебедки без разрешения. В период работ по спуску-подъему трала личному составу, не участвующему в этих работах, запрещается находиться на промысловой палубе и в районе траловой лебедки.
При заправке подбор дрифтерной сети в сетевыборочную машину необходимо удерживать подборы руками на расстоянии не менее 1 м от движущейся части машины. Скорость машины при этой операции должна быть минимальной.
Валы и подшипники можно смазывать только при полной остановке приводного двигателя. Нельзя руками направлять вертлюг стяжного троса при замете кошелькового невода. При выборке невода неводовыборочной машиной опасно становиться на жгут набегающей части невода, а также подправлять его между тяговыми барабанами машины. Нельзя распутывать навернутую на барабан неводовыборочной машины сходящую часть жгута невода при работе машины. Принимать сходящую часть жгута с барабанов машины разрешается только на расстоянии не менее 1,5 м от тяговых органов машины. При использовании центробежных рыбонасосов для выливки рыбы из кошельковых неводов спуск всасывающего шланга за борт можно производить только при помощи грузовой стрелы, но не вручную.
На китобойных судах необходимо периодически проверять амортизационное устройство, обращая внимание на исправность:
- пружин;
- тяг;
- тросов;
- направляющих и ограждений.
Перед началом промысла рекомендуется тщательно осматривать и проверять в действии промысловые лебедки и шпили. Следует также периодически осматривать все промысловые блоки, скобы, вертлюги, гаки и не реже одного раза в три года проводить их испытания в заводских условиях.
Гарпун с неразорвавшейся гранатой на палубу не возвращают, а ликвидируют.
Члены экипажа судна обязаны немедленно докладывать вахтенному помощнику капитана обо всех неисправностях, обнаруженных в промысловом оборудовании и устройствах.

- Абдульманов X. А. Холодильная техника на судах рыбной промышленности. М., «Пищевая промышленность», 1970.
- Акимов П. П. Силовые установки морских судов. М., «Транспорт», 1965.
- Алексеев Г. Д., Карпович В. А. Энергетические установки промысловых судов. Л., «Судостроение», 1972.
- Аристов Ю. К. Судовые вспомогательные механизмы. М., «Речной транспорт», 1959.
- Богомольный А. Е. Судовые вспомогательные и рыбопромысловые механизмы. Л., «Судостроение», 1971.
- Грузберг Я. Ю. Судовые паровые котлы. Л., «Судостроение», 1964,
- Караев А. А. Энергетика судов будущего. Л., «Судостроение», 1967.
- Карамушко Ф. Д. и др. Судовые вспомогательные механизмы и системы. М., «Транспорт», 1968.
- Колесников О. Г. Судовые вспомогательные и холодильные установки. М., «Транспорт», 1967.
- Конфедератов И. Я. Основы энергетики. М., «Просвещение», 1967.
- Коршунов Л. П. Силовые установки рыбопромысловых судов. М., «Пищевая промышленность», 1967.
- Кузовлев В. А. Техническая термодинамика. М., «Транспорт», 1964.
- Петренко Л. Д. и др. Судовые энергетические установки, вспомогательные и рыбопромысловые механизмы. Л., «Судостроение», 1971.
- Соловьев Е. М. Пособие мотористу рыбопромыслового судна. М., «Пищевая промышленность», 1966.
- Соловьев Е. М. Пособие мотористу крупнотоннажного судна рыбопромыслового флота. М., «Пищевая промышленность», 1971.
- Туркин А. А. Вспомогательные механизмы и технологические холодильные установки промысловых судов. Л., «Судостроение», 1966.





