Мореплавание с древних времен является одним из самых сложных и требовательных видов человеческой деятельности. Открытый океан не прощает ошибок, и безопасность судна, его экипажа и груза напрямую зависит от способности капитана точно и надежно управлять движением. Ключевым устройством, обеспечивающим эту возможность, являются рулевые машины судна.
Рулевое устройство – это не просто руль или штурвал. Система рулевого управления судна представляет собой критически важный комплекс механизмов. Ее основная задача – преобразовать управляющее воздействие с мостика в физическое отклонение пера руля, что позволяет эффективно менять курс судна. Эффективность, быстродействие и, главное, безотказность рулевого устройства критически важны, поскольку оно определяет маневренность корабля в стесненных водах, его способность следовать заданным курсом в открытом море и, в экстренных ситуациях, уклоняться от опасностей.
В данном материале мы подробно рассмотрим, как устроены эти жизненно важные системы. Мы начнем с общих сведений, разберем составные части любого рулевого устройства и проанализируем жесткие требования, предъявляемые к ним морскими регистрами. Далее мы перейдем к изучению рулевых машин – «сердца» всего устройства, которые исторически и технологически делятся на паровые и современные электрические. Понимание принципов работы и конструкции этих механизмов необходимо для каждого, кто связан с эксплуатацией и обслуживанием морского флота.
Общие сведения о рулевых устройствах, их составные части и предъявляемые к ним требования
В данном пункте рассмотрим основные характеристики, и какие требования предъявляются к рулевым устройствам морских судов. Рулевое устройство и авторулевой системы управления судномРулевое устройство предназначено для сохранения заданного курса судна или изменения его в нужном направлении. В состав рулевого устройства входят:
- руль;
- рулевой привод;
- рулевая машина;
- передача управления рулевой машиной с поста управления судном.
Рули, являющиеся исполнительной частью устройства, выполняются:
- простыми,
- полубалансирными,
- балансирными,
и имеют плоскую или обтекаемую форму.
Руль закрепляется на баллере и связывается с рулевой машиной посредством рулевого привода. Рулевые приводы подразделяются на две группы:
- приводы с гибкой связью (штуртросные, цепные);
- приводы с жесткой связью (зубчатые, винтовые, гидравлические).
Выбор типа рулевого привода обусловливается расположением рулевой машины на судне. У многих паровых рыболовных траулеров рулевая машина располагается в рулевой рубке или под ней на уровне верхней палубы. При таком расположении рулевой машины ее связь с баллером руля осуществляется обычно через гибкую цепную или тросовую передачу. Цепь, охватывающая тяговый барабан машины, направляется через ролики вдоль бортов и присоединяется своими концами к сектору, закрепленному на баллере.
На прямолинейных участках цепь часто заменяют стальными штангами. В бортовую проводку включаются талрепные стяжки для выборки слабины и амортизирующие буферные пружины, работающие на сжатие.
К недостатку гибких рулевых приводов следует отнести неизбежную слабину в штуртросах, вследствие которой при ударе волны о перо руля возникают рывки. С другой стороны, при расположении Рулевые машины – классификация и особенности эксплуатации на морских судахрулевой машины возле мостика достигается:
- удобство ее обслуживания;
- надежность связи машины со штурвалом;
- быстрая реакция на движение штурвала.
Расположение рулевой машины на корме в специальном румпельном отделении обеспечивает надежную связь машины с рулем, но при этом требуется довольно длинная кинематическая передача управления машиной с мостика.
В современном судостроении более широкое распространение имеют рулевые приводы с жесткой связью, у которых рулевые машины расположены в непосредственной близости от рулевого привода. Приводы с гибкой связью используются на маломерных судах с небольшим крутящим моментом на баллере руля.
Принцип работы системы рулевого управления судна заключается в преобразовании слабой команды (управляющего воздействия) с ходового мостика в мощное движение, которое отклоняет перо руля. Передачи управления рулевой машиной с ходового мостика бывают четырех типов:
- механические,
- гидравлические,
- электрические,
- электрогидравлические.
Механическая передача состоит из:
- ряда стальных стержней, соединенных между собой при помощи муфт;
- конических шестерен;
- карданных шарниров, обеспечивающих проводку валиков по ломаной линии.
Для уменьшения усилий, прилагаемых к штурвалу, подшипники валиков рекомендуется выполнять шариковыми и обеспечивать надлежащей смазкой. При проходе через водонепроницаемые переборки валики должны иметь уплотнительное устройство.
Вследствие неизбежных зазоров в шестернях и шарнирах механическая валиковая передача не обеспечивает мгновенной реакции рулевой машины на поворот штурвала и подвержена заклиниванию в связи с деформацией корпуса судна.
Разновидностью механической передачи управления рулевой машиной является тросовая передача, состоящая из двух барабанов, охватываемых гибким тросом или цепью. Преимуществом этого вида передачи является удобство ее проводки и простота устройства, недостатком – слабина в передаче, образующаяся вследствие вытягивания троса.
Гидравлическая передача представляет собой замкнутую систему, заполненную жидкостью и состоящую из передатчика и приемника, связанных между собой трубопроводами.
Вращение штурвала через передатчик, установленный на мостике, и приемник, находящийся в румпельном отделении, передается пусковому устройству рулевой машины. Гидравлическая передача может быть применена для управления как гидравлическими, так и паровыми рулевыми машинами, работает точно и плавно и не реагирует на деформацию Принципы проектирования конструкций корпуса суднакорпуса судна. К недостаткам гидравлической передачи следует отнести потребность в тщательном уходе и сравнительно сложное конструктивное выполнение.
Электрические передачи управления, применяемые в электрических и гидравлических рулевых машинах, могут быть прямого и следящего типа.
В системах прямого управления при выводе из нулевого положения задающего рычага или штурвала на мостике электродвигатель рулевой машины начинает работать и перекладывать руль до тех пор, пока рычаг или штурвал не будет возвращен в нулевое положение. Для возвращения руля в диаметральную плоскость нужно поворачивать задающий орган управления в противоположном направлении и по достижении рулем требуемого угла снова установить орган управления в нулевое положение.
В следящих системах управления при повороте задающего органа на какой-либо угол от нулевого положения электродвигатель перекладывает руль в соответствующую сторону и автоматически останавливается при достижении рулем заданного угла.
Для возврата руля в диаметральную плоскость достаточно рычаг или штурвал вернуть в начальное положение.
Число манипуляций рулевого с задающим органом при следящей системе вдвое меньше, чем при прямой системе управления.
В электрогидравлических системах управления с мостика, применяемых исключительно в гидравлических рулевых машинах, задающий орган на мостике через специальную электроцепь воздействует на распределительные органы особой вспомогательной гидравлической системы. Жидкость системы воздействует на поршень приемника, от которого в свою очередь через систему рычагов и тяг управляются насосы переменной производительности, подающие жидкость в гидравлический рулевой привод.
При такой смешанной системе управления электрическая часть получается более простой и система управления в целом является более надежной, чем при чисто электрическом управлении рулевой машиной с мостика.
Правилами Регистра РФ и технической эксплуатации судов морского флота предъявляются следующие требования к рулевым устройствам:
- надежность и безотказность в работе;
- обеспечение заданного угла и достаточной скорости перекладки руля;
- возможность нескольких независимых вариантов управления судном (не менее двух);
- наличие ограничительных устройств, которые не дают отклоняться рулю более чем на 2-3° против допускаемых углов перекладки;
- наличие тормозного устройства, обеспечивающего надежное закрепление баллера в штормовую погоду при переходе с одного рулевого привода на другой;
- наличие на всех постах управления тщательно выверенных указателей положения руля с допускаемой ошибкой показаний 1-2° при отклонении руля от среднего положения на каждый борт;
- обеспечение удобства управления и безопасность обслуживания.
К рулевым машинам предъявляются (кроме упомянутых выше) следующие дополнительные требования:
- запуск из любого положения, при этом машина должна развивать полную мощность;
- обеспечение перекладки руля с борта на борт не более чем за 28 сек при полном переднем ходе судна;
- возможность автоматической остановки (во избежание поломки рулевого устройства), когда руль еще не дойдет на 2-3° до палубных ограничителей;
- обеспечение поворота судна, совпадающего со стороной вращения штурвала;
- простой и быстрый переход с основного управления на запасное.
Перед каждым выходом в море части рулевого устройства необходимо осмотреть и хорошо смазать, рулевое устройство проверить в действии на перекладку руля на оба борта; рулевые указатели необходимо проверить на совпадение их показаний с действительным положением руля.
Во время нахождения судна в море части рулевого устройства ежедневно осматриваются Организация штурманской службывахтенными штурманами и механиками. При каждой постановке судна в док руль должен быть осмотрен судовой администрацией совместно с инспектором Регистра РФ.
Особое внимание при осмотре следует обращать на величину проседания руля и на возможное скручивание баллера. Запрещается выпускать судно в море, если:
а) руль перекладывается с борта на борт недостаточно быстро (больше 35 сек);
б) угол перекладки руля на каждый борт недостаточен (менее 35°);
в) имеется скручивание баллера руля на угол более 7° (без пересадки сектора или румпеля на новую шпонку);
г) руль не перекладывается от среднего положения на борт или обратно;
д) неисправен запасной рулевой привод и механизм переключения с основного привода на запасной.
Паровые и электрические рулевые машины судна
Паровые рулевые машины судна
Наиболее старым типом судовой рулевой машины является паровая рулевая машина, начало применения которой почти совпадает с появлением паровых судов.
Рассмотрим устройство и принцип действия паровой рулевой машины на судне. В качестве двигателя рулевой машины используется двухцилиндровая паровая машина, работающая без расширения пара и реверсируемая дифференциальным золотником.
Паровые рулевые машины судна различной конструкции работают по общему принципу и имеют узел, называемый сервомотором.
Что такое сервомотор?
Сервомотор – это управляющий узел, который позволяет рулевой машине выполнять работу по перекладке руля в точном соответствии с движением штурвала.
Сервомоторы также различны по конструкции, но подавляющее большинство их имеет винтовую пару.
На рис. 1 показана кинематическая схема горизонтальной паровой рулевой машины, устанавливаемой на паровых рыболовных траулерах типа «Урал».
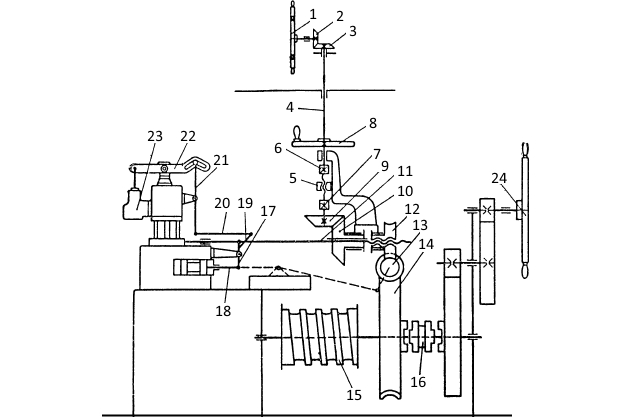
Рулевую машину устанавливают в специальном помещении под ходовым мостиком, на котором имеется штурвал 1 для механической перекладки руля. Штурвал через конические шестерни 2, 3 связан с вертикальным валиком 4, проходящим через палубу и имеющим нарезной участок, на котором насажена ползушка 5 и закреплены ограничители 6, 7 перекладки руля. Маховичок 8 служит для управления машиной в случае поломки верхнего штурвала.
На конце валика 4 закреплена коническая шестерня 9, сцепляющаяся с шестерней 10, закрепленной при помощи скользящей шпонки на сервомоторном валике 11. Правый конец сервомоторного валика имеет ленточную резьбу и входит в нарезную ступицу небольшой червячной шестерни 12, не имеющей осевого перемещения и сцепляющейся с червяком 13.
С червяком 13, приводимым в действие двухцилиндровой горизонтальной паровой машиной, сцепляется также червячное колесо 14, насаженное свободно на одном валу с тяговым барабаном 15 и закрепляемое при механической перекладке руля кулачковой муфтой 16.
К сервомоторному валику 11 шарнирно крепится верхний конец рычага 17, имеющего ось качания посредине и присоединяемого другим концом к тяге 18 дифференциального золотника. К рычагу 17, выше оси качания, приварен поводок 19, связанный тягой 20 и рычагами 21 к 22 с клапаном экономии 23.
Для механической перекладки руля необходимо открыть запорный паровой вентиль и закрепить кулачковой муфтой 16 червячное колесо 14. Вращение штурвала на мостике в этом случае вызовет вращение сервомоторного валика 11, который начнет ввертываться нарезной частью в резьбу ступицы червячной шестерни 12 и в результате этого получит осевое перемещение. Сервомоторный валик соединяется с рычагом 17 таким образом, что одновременно обеспечивается возможность вращательного и поступательного движения валика.
Сервомоторный валик, двигаясь поступательно, поворачивает рычаг 17 и сдвигает дифференциальный золотник, открывающий доступ пара к распределительным золотникам Главные паровые машины на судахпаровой машины.
При повороте рычага 17 поворачивается и поводок 19, вызывающий через тягу 20 и рычаги 21, 22 открытие клапана экономии, который пропускает пар к дифференциальному золотнику машины. С поступлением пара в цилиндры машины начинает вращаться червяк 13, червячное колесо 14 и тяговый барабан 15, охватываемый несколькими витками цепного штуртроса.
Одновременно начинает вращаться червячная шестерня 12 сервомотора, направление вращения которой всегда совпадает с направлением вращения сервомоторного валика. Через некоторое время после начала работы машины число оборотов шестерни 12 становится равным числу оборотов сервомоторного валика, и они начинают вращаться как одно целое.
Поступательное перемещение сервомоторного валика при этом прекратится, и дифференциальный золотник остановится на определенном открытии окон, обеспечивая впуск в цилиндры машины соответствующего количества пара.
Если рулевой ускорит вращение штурвала, то возрастет число оборотов сервомоторного валика и он, вращаясь быстрее шестерни 12, приобретет дополнительное перемещение, которое вызовет дополнительный сдвиг дифференциального золотника.
При открытии паровпускного окна на большую величину увеличивается количество пара, поступающего в цилиндры, и машина, ускорив вращение, доводит обороты шестерни 12 до нового числа оборотов сервомоторного валика. При совпадении оборотов сервомоторного валика и шестерни 12 перемещение дифференциального золотника вновь прекратится, и он, остановившись на большем открытии паровых окон, обеспечит ускоренный режим работы рулевой машины.
Если рулевой остановит штурвал, вращение сервомоторного валика прекратится, а рулевая машина, продолжая работать и вращая сервомоторную шестерню 12, как гайку, вокруг неподвижного винта, сообщит сервомоторному валику обратное перемещение и дифференциальный золотник подойдет к среднему положению.
При обратном движении сервомоторного валика через поводок 19, тягу 20, рычаги 21, 22 осуществляется посадка на гнездо клапана экономии, перекрывающего доступ пара к дифференциальному золотнику, и машина останавливается.
При обратном вращении штурвала дифференциальный золотник смещается в другую сторону от среднего положения, при этом изменяется направление подвода пара и вращения рулевой машины.
Для автоматической остановки рулевой машины при подходе руля к крайним положениям служат ползушка 5 и ограничители 6, 7, закрепленные на валике 4. При вращении валика 4 ползушка, не имеющая вращения, перемещается по резьбе в ту или иную сторону и к моменту, когда руль не доходит до крайнего положения на 2-3°, упирается в соответствующий ограничитель. Дальнейшее вращение штурвала, а, следовательно, и сервомоторного валика становится невозможным, и машина останавливается, как при обычной остановке штурвала.
Для ручной перекладки руля предназначен большой штурвал 24, вращение которого через две пары цилиндрических шестерен с общим передаточным отношением 1:25 передается валу тягового барабана. Для перехода на ручное управление необходимо вывести из зацепления с червячным колесом двустороннюю кулачковую муфту 16 и закрепить с помощью ее шестерню ручного привода.
Рекомендуется к прочтению: Гидродинамические силы, влияющие на рулевое устройство малотоннажного судна
При ручном управлении ограничительная ползушка не перемещается и ее положение не соответствует положению руля. Поэтому при переходе с ручного управления на механическое необходимо обращать внимание на указатель положения руля и в соответствии с его показаниями производить вращение штурвала механического привода.
При остановке штурвала дифференциальный золотник, возвращаемый машиной в среднее положение, перекрывает проходное сечение паровпускного окна, уменьшая количество пара, поступающего в цилиндры, и снижая его давление на поршни.
При этом наступит момент, когда количество пара, поступающего в цилиндры, окажется настолько малым, что он не сможет совершить работу по преодолению сопротивлений, и машина остановится, не поставив дифференциальный золотник в строго среднее положение. Через оставшуюся щель пар будет просачиваться в цилиндры машины, и конденсироваться там.
При реверсе рулевой машины пар, проникший в цилиндры, выпускается в трубу отработавшего пара и таким образом теряется, не совершив работы. Так как рулевая машина подвергается очень частым реверсам, то потери пара по этой причине будут весьма значительными.
Кроме того, вследствие смешивания свежего пара с влажным, просочившимся в цилиндры, понижается среднее индикаторное давление, и машина становится менее чувствительной к действиям дифференциального золотника в первые моменты пуска ее в ход. Для прекращения доступа пара к дифференциальному золотнику после остановки рулевой машины последняя снабжается клапаном экономии.
Устройство клапана экономии, установленного на описанной выше рулевой машине, показано на рис. 2.
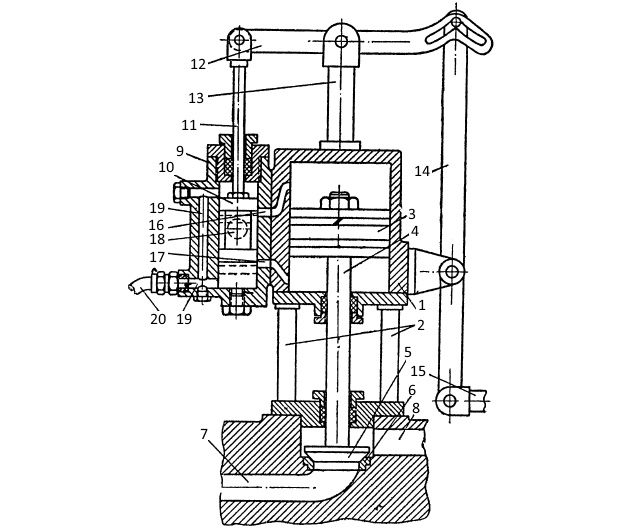
Клапан экономии состоит из цилиндра 1, прикрепленного к корпусу дифференциального золотника двумя вертикальными стойками 2. В цилиндре помещается поршень 3 с чугунными уплотнительными кольцами, закрепляемый на штоке 4, который выходит из цилиндра через сальниковое уплотнение.
На нижнем конце штока закрепляется конический клапан 5, пригоняемый по гнезду 6, запрессованному в корпусе дифференциального золотника. Свежий пар по каналу 7 подводится под клапан и по каналу 8 поступает к дифференциальному золотнику. В положении, показанном на рисунке, клапан 5 перекрывает пар на дифференциальный золотник и рулевая машина не работает.
К цилиндру 1 крепится коробка 9, в которой помещается цилиндрический распределительный золотничок 10, связанный со штоком 11. Конец штока 11 шарнирно крепится к рычагу 12. Ось качания рычага закреплена на кронштейне 13. На другом конце рычага 12 выфрезерован плавно расходящийся паз, в который входит палец, закрепленный на конце вертикального рычага 14. К другому концу рычага 14 шарнирно присоединена тяга 15, связанная с поводком сервомоторного валика.
При неработающей рулевой машине рычаг 14 занимает вертикальное положение и его палец находится в вершине углового паза. В соответствии с этим распределительный золотничок 10 занимает верхнее положение, обеспечивая внутреннее открытие канала 16 и внешнее открытие канала 17. Канал 18, расположенный между полями распределительного золотничка, связан латунной трубкой с Ремонт трубопроводов и арматурытрубопроводом свежего пара, поэтому кольцевая полость между полями золотничка всегда заполнена свежим паром.
При верхнем положении золотничка 10, соответствующем остановке машины, свежий пар, поступающий по каналу 16 в верхнюю полость цилиндра 1, действует на поршень 3 и прижимает к гнезду клапан 5.
Если штурвал на мостике привести во вращение, то сервомоторный валик начнет перемещаться и через поводок и тягу 15 сообщит вращение рычагу 14. Палец рычага 14, действуя на ту или другую сторону наклонного паза, поворачивает рычаг 12 и опускает распределительный золотничок 10 в нижнее положение, показанное на рисунке пунктиром. Так как при этом осуществляется внутреннее открытие канала 17 и внешнее открытие канала 16, то свежий пар поступит в нижнюю полость цилиндра 1, а из верхней полости – выйдет по каналу 19 в трубку 20, сообщающуюся с каналом отработавшего пара.
Под действием разности давлений поршень 3 пойдет вверх и поднимет клапан 5, открывающий пар к дифференциальному золотнику машины. Рулевая машина заработает, сервомоторный валик остановится, поворот рычага 14 прекратится, и распределительный золотничок будет удерживаться в нижнем положении. Как только вращение штурвала прекратится, сервомоторный валик, двигаясь в обратном направлении, подведет рычаг 14 к среднему положению.
Распределительный золотничок при этом поднимется в верхнее положение и произведет впуск пара в верхнюю полость цилиндра 1 и выпуск из нижней полости. Поршень 3 опустится, посадит клапан 5 на гнездо, и доступ пара к дифференциальному золотнику прекратится.
Электрические рулевые машины судна
Электрические рулевые машины применяются в основном на теплоходах и электроходах.
Они имеют более простую механическую часть по сравнению с рулевыми машинами других типов, но электрическая часть их, необходимая для управления электродвигателем в широком диапазоне изменения скоростей, сравнительно сложна.
Для электрических рулевых машин применяются электромоторы постоянного тока, работающие по электрической схеме генератор-двигатель.
Поскольку все современные суда предназначены для работы с переменным током, то для Электрические и электрогидравлические рулевые машиныэлектрических рулевых машин необходима установка специальных преобразователей.
Электрические рулевые машины устанавливаются чаще всего в румпельном отделении на корме судна, и управление ими с ходового мостика производится через электрическую схему следящего типа.
На рис. 3 схема электрической рулевой машины с зубчатым секторным рулевым приводом, установленная на большой серии траулеров типа «Атлантик».
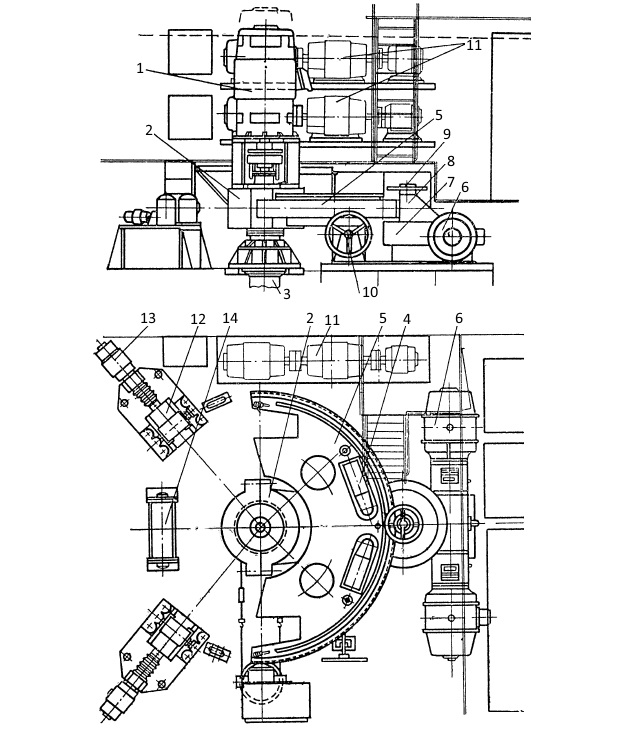
Рулевое устройство траулеров типов «Атлантик» и «Тропик» снабжено активным рулем типа «Фостра», представляющим собой трехлопастный винт диаметром 800 мм, установленный в насадке пера руля.
Винт приводится во вращение через водонепроницаемый угловой редуктор и длинный вал, проходящий в пустотелом баллере, от электродвигателя 1 мощностью 70 кВт, установленного на румпеле 2, который закреплен на баллере руля 3.
Румпель через буферные пружины 4 связан с зубчатым сектором 5, с зубьями которого находится в зацеплении ведущая шестерня, получающая вращение от электродвигателей 6 через червячный редуктор 7.
Ведущая шестерня, помещенная в кожухе 8, отключается с помощью маховичка 9.
Читайте также: Выбор вспомогательных механизмов для комплектации судна
Румпель рулевого устройства может стопориться зажимным устройством, действующим от маховика 10. Один из электродвигателей 6 является резервным и обычно пускается автоматически при остановке работающего электродвигателя.
В румпельном отделении установлены также два преобразователя 11, один из которых является резервным. Эта рулевая машина может производить перекладку руля на 35° и на 88° на каждый борт.
Если судно идет с большой скоростью, перекладка руля ограничивается до 35° на каждый борт стопорами-выключателями 12. Если при движении судна с большой скоростью перо руля отклонится на угол больше 35°, сектор нажимает на концевой выключатель стопора 12, в результате чего электромагнитные муфты, соединяющие главные двигатели с гребным валом, разобщаются. Этим предотвращается перегрузка деталей в рулевом устройстве, которая может возникнуть при отклонении руля на угол, превышающий 35°, при больших скоростях движения судна.
При работе с орудиями лова или при швартовках к плавбазам, когда судно движется с небольшими скоростями (до 5 узлов), перо руля может отклоняться от диаметральной плоскости на угол 88°.
В этом случае стопоры-выключатели 12 отодвигаются, и сектор проходит мимо стопоров. Отодвигание стопоров производится дистанционно с помощью электродвигателей 13, управляемых с ходового мостика.
Ограничение перекладки руля на угол более 88° осуществляется также стопором-выключателем 14. В процессе эксплуатации рулевых машин этого типа необходимо контролировать уровень масла в червячном редукторе, производить периодическую смазку зубьев сектора и подшипника баллера и систематически проверять состояние электрооборудования.
Тяговый расчет рулевой машины со штуртросным приводом
Расчет рулевых устройств и их эксплуатация на суднеРасчет рулевой машины (рис. 4) можно вести в следующем порядке.

1 Определяется потребная погруженная площадь пера руля по эмпирической формуле:
где:
- L – длина судна, м;
- T – осадка судна, м;
- μ – коэффициент, равный 1,2 для рулей, не находящихся непосредственно за гребным винтом и 1,0 – для рулей, расположенных за винтом.
Для буксиров погруженную площадь рекомендуется увеличивать на 25 %.
2 Подсчитывается необходимый вращающий момент на баллере руля по приведенным ниже эмпирическим формулам:
- для плоского прямоугольного небалансирного руля:
- для плоского балансирного руля:
где:
- F – площадь погруженной части руля, м2;
- v – скорость судна, узлы;
- x – ширина пера руля, м;
- α – угол перекладки руля;
- z – расстояние между передней кромкой балансирного руля и осью баллера.
3 Подсчитывается характеристика руля по формуле Регистра РФ:
где:
- F – площадь пера руля, м2;
- r – расстояние от оси вращения руля до центра тяжести, м.
4 По найденной характеристике из соответствующих таблиц Регистра РФ выбирается диаметр баллера, калибр цепного штуртроса и радиус сектора рулевого привода.
5 Определяется натяжение штуртроса по формуле:
где:
- M1 – крутящий момент на баллере, Н·м;
- R – радиус сектора, м;
- ηб – КПД, учитывающий потери на трение в подшипниках баллера, равный 0,8-0,85.
Тяговое усилие в штуртросе не должно составлять больше 1/4 разрывного усилия.
6 Находится тяговое усилие на штуртросном барабане с учетом потерь на трение в направляющих блоках:
где:
- k – общее число направляющих блоков в штуртросной проводке;
- ηн – КПД направляющего блока, зависящий от угла обхвата его штуртросом, равный 0,88-0,9.
7 Определяется радиус штуртросного барабана или цепной звездочки:
- для барабана с обычным цепным штуртросом:
- для звездочки с калиброванной цепью:
- для звездочки с цепью Галля:
где:
- dц – калибр цепного штуртроса, мм;
- l = 2,6dц – внутренняя длина звена, мм;
- z = 7-9 – число кулаков или зубьев звездочки;
- T2 – нагрузка цепи, Н.
8 Находится потребный вращающий момент на валу червячного колеса:
где:
- ηз – КПД, учитывающий потери на трение штуртроса в звездочке и подшипниках, равный 0,88-0,9.
9 Определяется крутящий момент на валу червяка:
где:
- – передаточное отношение червячной пары, лежащее в пределах 30-60;
- – КПД червячной пары и подшипников червячного вала;
- β – угол подъема витка;
- ρ – угол трения.
Для рулевых машин применяются обычно однозаходные или двухзаходные червяки, у которых угол подъема витка больше угла трения.
Будет интересно: Составные части рулевых устройств и предъявляемые к ним требования
10 Определяются размеры червячной пары. Определение ведется так же, как и для брашпилей.
11 Из следующего соотношения находится число оборотов баллера:
откуда:
где:
- φ – общий угол перекладки руля с борта на борт, град;
- t – время перекладки руля, сек.
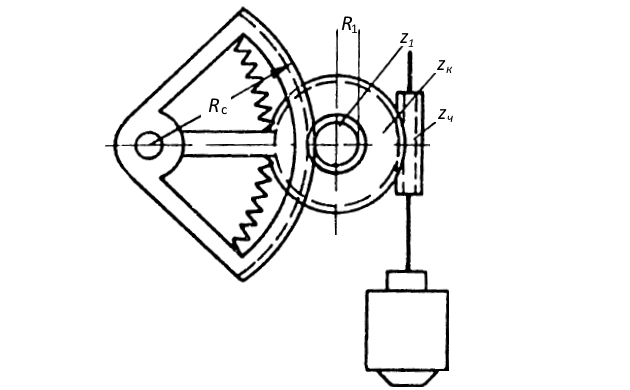
12 Определяется число оборотов червяка, равное числу оборотов вала машины, по формуле:
где:
- nб – число оборотов баллера в минуту;
- R – радиус баллера, м;
- R1 – радиус штуртросного барабана, м;
- zк – число зубцов червячного колеса;
- zч – число заходов червяка.
13 Находится эффективная мощность на валу рулевой машины по формуле:
где:
- M3 – крутящий момент на червячном валу, Н·м;
- nч – число оборотов червячного вала в минуту.
Расчет рулевой машины с секторным приводом
Расчет рулевой машины с секторным приводом ведется следующим образом (рис. 5).
1 Вращающий момент на баллере и характеристика руля, по которой из таблицы Регистра РФ выбирается диаметр баллера и радиус зубчатого сектора, определяются так же, как и в предыдущем случае.
2 Окружное усилие на зубчатом ободе сектора:
где:
- M1 – крутящий момент на баллере, Н·см;
- Rс – радиус сектора, см;
- ηб – КПД, учитывающий потери на трение в подшипниках баллера.
3 Шаг зубчатого зацепления сектора и цилиндрической шестерни:
где:
- T1 – окружное усилие, Н;
- – отношение длины зуба к шагу;
- – коэффициент, зависящий от допускаемого напряжения на изгиб.
4 Число зубцов на полной окружности сектора:
где:
- Rс – радиус сектора, см;
- m – модуль зацепления, см.
5 Радиус малой цилиндрической шестерни:
где:
- z1 – число зубцов малой шестерни, принимаемое в пределах 15-20.
6 Крутящий момент на валу червячного колеса:
где:
- ηз. п – КПД зубчатой передачи, равный 0,93-0,95;
- ηп – КПД подшипников и подпятников вертикального вала, равный 0,9-0,92.
7 Крутящий момент на червячном валу:
где:
- – передаточное число червячной пары;
- ηч. п – КПД червячной пары и подшипников червячного вала.
У электрических рулевых машин рекомендуется применять однозаходные самотормозящие червяки с углом подъема меньше угла трения и, несмотря на это, снабжать рулевую машину электромагнитным тормозом для гашения Судовой якорь и его применение при швартовкеинерции якоря электромагнита.
8 Число оборотов червяка может быть подсчитано по общему передаточному отношению:
где:
- – число оборотов баллера в минуту.
9 Эффективная мощность на валу электродвигателя подсчитывается по формуле:
Мощность, определенная по этой формуле, будет излишне большой, так как она рассчитана по наибольшему крутящему моменту, соответствующему подходу руля к борту при полной скорости судна. Средняя мощность двигателя окажется значительно меньше расчетной. Так как электродвигатель допускает работу с перегрузкой, то нормальный крутящий момент на валу его принимают на 30-40 % меньше расчетного момента. Нормальное число оборотов при этом увеличивают на 15-30 %.
Таким образом, нормальная мощность электродвигателя рулевой машины будет равна:
По нормальной мощности и нормальному числу оборотов выбирают из каталога подходящий электродвигатель.

- Аристов Ю. К. Судовые вспомогательные механизмы. М., Речной транспорт. М., 1963.
- Арцыков А. П., Воронов В. Ф. Судовые вспомогательные механизмы. Л., Судпромгиз, 1963.
- Башта Т. М. Машиностроительная гидравлика. М., ГНТИМЛ, 1963.
- Богомольный А. Е. Судовые вспомогательные и рыбопромысловые механизмы. Л., Судостроение, 1971.
- Валдаев М. М. Гидравлические приводы судовых палубных механизмов. Л., Судостроение, 1973.
- Власьев Б. А., Резчик Ю. И. Судовые вспомогательные механизмы. Л., Судостроение, 1979.
- Жаров В., Жеребенков Ю., Кадильников Ю., Кузнецов В. Тунцы и их промысел в Атлантическом океане. Калининградское книжное издательство, 1964.
- Завиша В. В. Гидравлические рулевые машины. Изд-во Транспорт, 1965.
- Коваленко В. Ф., Лукин Г. Я., Рогалев В. М. Водоопреснительные установки морских судов. Изд-во Транспорт, 1964.
- Колесников О. Г. Судовые вспомогательные механизмы и холодильные установки. М., Транспорт, 1964.
- Лукин Г. Я., Колесник Н. Н. Опреснительные установки промыслового флота. М., Пищевая промышленность, 1970.
- Попов Р. И. Судовые вспомогательные механизмы. М., Пищевая промышленность, 1970.
- Российский морской регистр судоходства, Санкт-Петербург, 2017.
- Терентьев А. В., Миллер Б. Н., Чернигин Н. Ф. Гидравлическая механизация в рыбной промышленности. Пищепромиздат, 1956.
- Торбан С. С. Судовые и береговые промысловые установки и механизмы. М., Пищевая промышленность, 1972.
- Торбан С. С. Комплексная механизация дрифтерного лова рыбы. М., Пищевая промышленность, 1966.
- Шмаков М. Г. Судовые устройства. М., Транспорт, 1971.
- Шмаков М. Г., Климов А. С. Якорные и швартовные устройства. Л., Судостроение, 1964.
- Юткевич Р. М., Савин К. А., Волегов В. А. Судовые сепараторы топлива и масла. Л., Судостроение, 1967.





