Судовые рулевые машины играют критически важную роль в обеспечении безопасности и маневренности судна. В современном судостроении широкое распространение получили электрические и электрогидравлические рулевые машины, отличающиеся своей надежностью, эффективностью и точностью управления.
В данном материале подробно рассмотрим конструкции рулевых машин, особенности насосов, используемых в электрогидравлических системах, а также классификацию и конструкции самих электрогидравлических рулевых машин. Особое внимание будет уделено сравнительной оценке различных типов рулевых машин, включая преимущества и недостатки электрических рулевых машин, что позволит судовладельцам и судостроителям сделать осознанный выбор в пользу оптимального решения для конкретных условий эксплуатации судна.
Конструкции электрических рулевых машин
Электрические рулевые машины применяются на судах среднего тоннажа с электрифицированными Вспомогательные механизмы и работа суднавспомогательными механизмами. Электрические секторные рулевые машины российской конструкции разработаны под руководством И. С. Клячко, Б. В. Лера, К. К. Воробьева и др. Ниже приведены схемы электрических рулевых машин для судов различных типов.
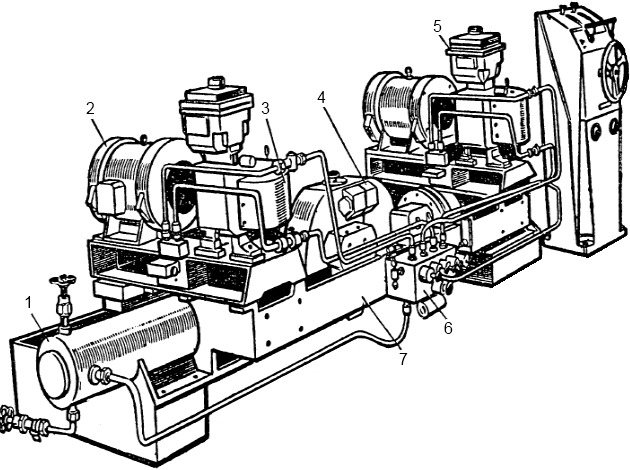
На рис. 1 изображен общий вид российской электрической машины типа РЭР-7,5.

Момент, развиваемый машиной на баллере, 7,5 тс·м.
На общей фундаментной плите 2 установлены электродвигатель 1, зубчатый редуктор 3 и червячный редуктор 5. Плита 2 крепится на сварном фундаменте палубы румпельного отделения. Момент электродвигателя через соединительную эластичную муфту, редуктор 3, червячную передачу 5 и шестерню 6 передается сектору 7, лежащему на опорных катках 10, воспринимающих нагрузку от вала сектора. Поворот сектора 7, свободно сидящего на баллере 14, через пружинные буферные компенсаторы 8 передается румпелю 12, вращающему баллер руля 14. Для ограничения поворота предусмотрены электрические конечные выключатели 4 с приводом от стрелки аксиометра и механические буферные ограничители 11.
Вспомогательный (аварийный) ручной привод имеет малый зубчатый сектор 15, червячную передачу 17, червяк которой системой конических зубчатых передач и валов 16 связан с ручными штурвалами. При переходе с механического привода на ручной и обратно баллер руля на время переключения затормаживается колодочным тормозом 13, имеющим ручной привод 9. Положение пера руля передается на пост рулевого управления электрическим датчиком 18, связанным механическим приводом 19 с баллером руля.
В таких рулевых машинах чаще всего применяются системы непосредственного дистанционного управления (простые – неследящие).
Принцип работы электрических рулевых машин заключается в том, что рулевой двигатель включается и выключается с поста управления.
Момент на баллере, обеспечиваемый отдельными марками электрических секторных рулевых машин, например:
- РЭР15, составляет 15 тс·м (мощность привода 9,3 кВт);
- рулевых машин производства ГДР – 16 тс·м;
- машин, выпускаемых фирмой «Атлас-Верке» – 25 и даже 40 тс·м.
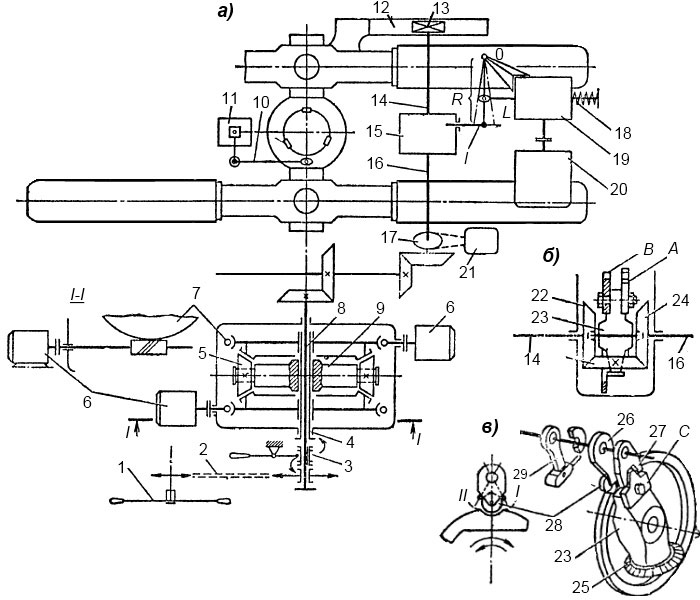
На рис. 2 изображена схема электроручной рулевой машины с винтовым приводом и муфтой Федорицкого.
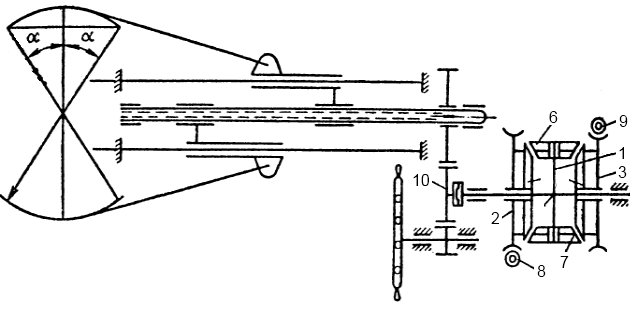
Эта машина состоит из:
- винтового привода, уже описанного ранее;
- муфты (дифференциала), предложенной русским инженером Федорицким;
- и штурвала с шестеренчатой передачей, позволяющей при необходимости производить перекладку руля вручную.
Наиболее сложной частью в этой рулевой машине является муфта, предназначенная для передачи вращения от двух электродвигателей через винтовой привод баллеру руля.
Как работает рулевая машина с муфтой Федорицкого? Муфта состоит из двух червячных шестерен 2 и 3, имеющих общую ступицу с коническими шестернями 4 и 5 соответственно. Шестерни 4 и 5 свободно насажены на горизонтальный вал крестовины 1 и входят в зацепление с червяками 8 и 9, которые получают вращение от электродвигателей. На вертикальный вал крестовины также свободно насажены конические шестерни 6 и 7, которые входят в зацепление с коническими шестернями 4 и 5.
Обычно, когда судно движется по курсу в открытом море, Рулевое устройство и авторулевой системы управления судномрулевое устройство приводится в действие одним из электродвигателей. Второй электродвигатель может быть включен, если необходимо повысить быстроту перекладки руля, например при плавании в узкостях. При работающем одном электродвигателе, например соединенном с червяком 8, вращающий момент будет передаваться червячной шестерне 2 и затем конической 4, которая заставит вращаться конические шестерни 6 и 7 вокруг своих осей и одновременно катиться по неподвижной шестерне 5. Такое движение шестерен 6 и 7 вызовет вращение крестовины в сторону вращения шестерни 4, в результате чего вращение получит зубчатая цилиндрическая шестерня 10 и баллер руля. Частота вращения крестовины в этом случае будет составлять половину частоты вращения червячной шестерни. Если оба червяка вращаются в одну сторону с разной частотой вращения, то частота вращения крестовины (об/мин) будет равна полусумме частоты вращения червячных шестерен 2 и 3, т. е.:
При вращении червяков с одинаковой частотой в одну сторону крестовина будет вращаться с такой же частотой, что и одна из конических шестерен 4 или 5. Если же электродвигатели червяков будут вращаться в разные стороны с различными оборотами, то частота вращения крестовины будет равна полуразности частот вращения конических шестерен 4 и 5:
При этом крестовина будет вращаться в сторону вращения той из шестерен, которая имеет большую частоту вращения. Если валы электродвигателей вращаются в противоположные стороны с одинаковой частотой, то крестовина будет оставаться на месте, а шестерни 6 и 7 вращаться вокруг своих осей.
Винтовой привод с муфтой Федорицкого отличается прочностью, компактностью и высокой надежностью, так как его работа обеспечивается двумя электродвигателями; кроме того, наличие муфты позволяет использовать электродвигатели с большей частотой вращения и дает возможность изменять передаточное число в широких пределах (750-1 200).
В каких конструкциях используется муфта Федорицкого?
Муфта Федорицкого является составной частью отдельных конструкций современных рулевых машин, например машины РЭГ3 и др.
Следует отметить, что в связи с развитием электрогидравлических рулевых машин, обладающих рядом преимуществ по сравнению с электрическими, область распространения последних с течением времени ограничивается.
Конструкции насосов электрогидравлических рулевых машин
На судах гидроприводы наиболее широко применяются в рулевых устройствах. Гидроприводы рулевых устройств стали применяться не только на больших судах, где необходимо обеспечить момент на баллере, равный десяткам и сотням тонна-сила-метров, но и на малых судах.
Все увеличивающееся использование гидроприводов на судах обусловлено их преимуществами:
- гидропривод имеет меньшие массы и габаритные размеры, чем электропривод;
- использование в гидроприводах в качестве рабочей жидкости минеральных масел создает хорошие условия смазки, что обеспечивает надежность и долговечность механизма;
- применение минерального масла позволяет иметь также малые сопротивления трения в подвижных деталях, что обеспечивает бесшумную и плавную работу без вибраций;
- гидропривод может обеспечить широкое бесступенчатое передаточное число и легкое реверсирование без обязательного изменения направления вращения механизмов, обеспечивающих реверсирование (это исключает необходимость преодоления больших инерционных усилий – они или отсутствуют или будут значительно меньше, чем, например, у электропривода);
- гидропривод способен осуществлять более частые изменения направления перекладки, чем электропривод;
- гидропривод способен работать в затопленном состоянии, что повышает живучесть судна;
- гидропривод может быть составлен из различных стандартных и унифицированных деталей и узлов, что уменьшает его стоимость;
- использование в гидроприводах насосов с большим значением КПД (0,9-0,95) обеспечивает высокую экономичность их эксплуатации.
От механического гидравлический привод выгодно отличается тем, что при его компоновке и монтаже нет необходимости обеспечивать строгое взаимное расположение его Проверка и наладка отдельных узлов траловых лебедокотдельных узлов и деталей. Насосы электрогидравлических рулевых машин приводят их в действие с помощью давления, создаваемого в цилиндрах гидравлического рулевого привода машины в целях перекладки руля. В электрогидравлических рулевых машинах находят применение насосы регулируемой, а также и постоянной подачи. Насосы регулируемой подачи (НРП) могут быть выполнены как радиально-поршневыми, так и аксиально-поршневыми.
Эти насосы должны:
- поддерживать неизменный напор, развиваемый насосом при регулируемой подаче, колеблющейся от нуля до максимального ее значения;
- не давать пульсирующей струи жидкости;
- быстро изменять направления подачи;
- быть экономичными.
Большее распространение имеют радиально-поршневые насосы, однако в перспективе аксиально-поршневые насосы найдут более широкое применение на судах. К середине 60-х годов разработан типизированный ряд рулевых машин типа Р, в которых в двух группах (из трех) применяются аксиально-поршневые насосы регулируемой подачи типа 11Д. Насосы постоянной подачи могут быть выполнены червячными, шестеренчатыми и роторно-шиберными. В отдельных случаях на судах можно встретить радиально- и аксиально-поршневые насосы, используемые как насосы постоянной подачи (отрегулированные на постоянную подачу), что экономически нецелесообразно, так как стоимость этих насосов в десятки раз больше стоимости последних. Преимущественное использование аксиально-поршневых насосов на судах новой постройки объясняется их компактностью и меньшей массой (при равной мощности с радиально-поршневыми насосами), способностью работать при больших давлениях с высоким КПД, а также тем, что они имеют малые радиальные размеры, допускающие большие частоты вращения, и меньшую стоимость.
Применение в рулевых машинах насосов постоянной подачи целесообразно до ограниченных пределов мощностей, так как при частичных нагрузках (когда регулирование осуществляется дросселированием жидкости) общий КПД гидравлических передач будет низким. По указанной причине применение насосов постоянной подачи распространяется на электрогидравлические рулевые машины с моментом на баллере, как правило, не более 4,5 тс·м, и только в отдельных случаях – с моментом до 10 тс·м (pраб = 22 кгс/см2).
На рис. 3 приведена конструкция аксиально-поршневого насоса (барабанного типа), установленного на гидравлической рулевой машине банановозов типа «Кура», приводимого в действие от электродвигателя.
Вал 1 соединяется с валом электродвигателя. Другой конец вала приводит во вращение через шарнирный вал 3 корпус цилиндров 8, который установлен на неподвижно укрепленном штыре 9. В корпусе имеется несколько аксиальных отверстий, в которых движутся поршни 6. Последние находятся в зацеплении с приводным фланцем 2 посредством штоков 5, которые снабжены шарообразными головками. Качающийся узел 11 подвешен на цапфах 14 и может поворачиваться на некоторый угол вокруг оси этих цапф на подшипниках 4. При наклоне узла 11 и при вращении вала 1 поршни будут двигаться в цилиндре, причем величина их хода будет зависеть от угла наклона узла 11. Масло к цилиндрам подводится по трубам 7 и 13, пустотелым цапфам 14 и каналам 12 (последние показаны пунктирными линиями). Каждый цилиндр при обороте вала будет соединяться один раз с трубой 7 и один раз с трубой 13; из одной трубы масло будет всасываться в цилиндр, а в другую нагнетаться. Штырь 10 соединяет узел 11 с механизмом изменения наклона. При работе насоса нагнетаемое масло поступает в исполнительную часть Рулевые машины на судахрулевой машины (табл. 1).
| Таблица 1. Техническая характеристика насоса | |
|---|---|
| Тип | 1T-120 (производство ФРГ) |
| Подача при давлении 43 кгс/см2, л/мин, около | 115 |
| Наибольшее рабочее давление, кгс/см2, не боле | 120 |
| Вязкость рабочей жидкости, °E30 | 25 |
| Мощность электродвигателя, кВт | 11,8 |
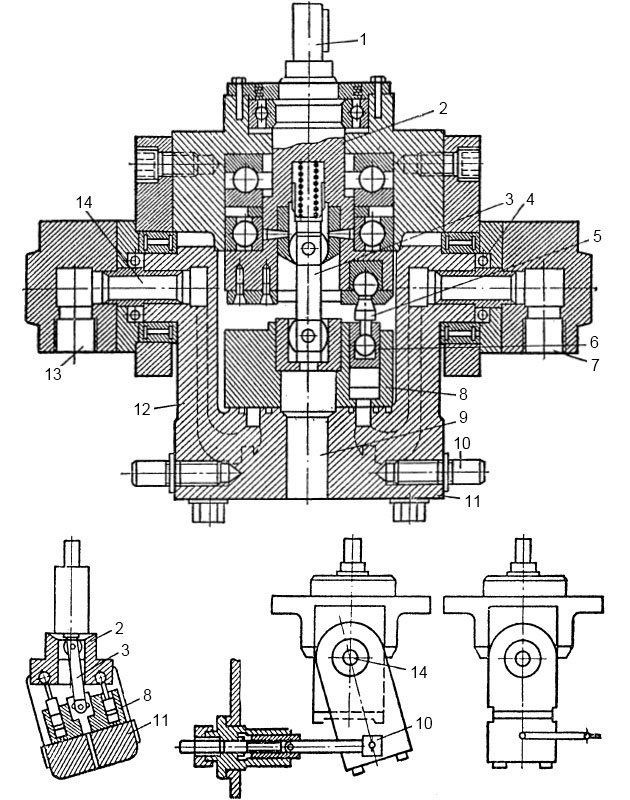
На рис. 4 показано конструктивное выполнение аксиально-поршневого насоса 11Д, предназначенного для нагнетания минерального масла в гидромашинах с регулируемым расходом жидкости и переменным направлением потока.
Российские заводы изготавливают насосы марок:
- 11Д-0,5;
- 11Д-1,5;
- 11Д-2,5;
- 11Д-5;
- 11Д-10;
- 11Д-20;
- 11Д-30;
- 11Д-50.
Привод насоса осуществляется через эластичную муфту. Насос состоит из:
- основного насоса высокого давления;
- вспомогательных узлов;
- элементов управления, которые смонтированы в одном корпусе, являющемся одновременно резервуаром для рабочей жидкости.
В центральной части корпуса 12 на двух опорах 13 и 15 установлен приводной вал 14 с поршнями, передающий вращение через кардан 10 блоку цилиндров 1 и через шестерню 16 – вспомогательному насосу. В цилиндрических отверстиях блока размещены бронзовые поршни 5, связанные через шатуны 6 с фланцем приводного вала. Блок цилиндров посажен на подшипник 2 и своими торцами опирается на распределитель 3, который прилегает к крышке люльки 4. Последняя при помощи болтов крепится к люльке 7. Люлька поворачивается вокруг вертикальной оси (относительно расположения рисунка) на подшипниках 11, которые насажены на полые цапфы 9. Сопряженные поверхности люльки и цапф уплотнены кольцами 8.
Читайте также: Гидродинамические силы, влияющие на рулевое устройство малотоннажного судна
Поворот люльки осуществляется валиком, на конец которого насажена шестерня. Входя в зацепление с зубчатым сектором, жестко связанным с корпусом люльки, шестерня поворачивает последнюю в любую сторону из нейтрального положения. Поворот валика осуществляется вручную или от механизма управления, установленного на крышке насоса. Пуск насоса производится при нулевом положении люльки. При отклонении люльки от нейтрального положения ось блока цилиндров отклоняется относительно оси приводного вала и поршни начинают совершать возвратно-поступательное движение, засасывая и нагнетая рабочую жидкость через соответствующие каналы распределителя. Техническая характеристика насосов 11Д приведена в таблице 2.
| Таблица 2. Техническая характеристика насосов типа 11Д | ||||||||
|---|---|---|---|---|---|---|---|---|
| Параметры | Марки насоса | |||||||
| 11Д-0,5 | 11Д-1,5 | 11Д-2,5 | 11Д-5 | 11Д-10 | 11Д-20 | 11Д-30 | 11Д-50 | |
| Максимальная подача (теоретическая), л/мин | 9 | 26,5 | 47 | 102 | 204 | 361 | 441 | 774 |
| Частота вращения, об/мин | 2 950 | 2 950 | 2 950 | 1 440 | 1 440 | 1 440 | 980 | 980 |
| Номинальное давление в полости нагнетания, кгс/см2 | 100 | |||||||
| Максимально допустимое давление, кгс/см2 | 160 | |||||||
| Минимальное время изменения производительности от нуля до максимальной, с | 0,1 | 0,12 | 0,15 | 0,2 | 0,3 | 0,35 | 0,4 | 0,5 |
| Примечание. Рекомендуется использовать насос при температуре рабочей жидкости не более 70 °С; нагрев рабочей жидкости выше 90 °С не допускается | ||||||||
Российская промышленность выпускает также насосы типа 11Р марок:
- 11Р-0,5;
- 11Р-1,5;
- 11Р-2,5;
- 11Р-5;
- 11Р-10;
- 11Р-20;
- 11Р-30;
- 11Р-50,
отличающиеся от насосов типа 11Д отсутствием устройств гидроавтоматики и предназначенные для работы в системах с ручным управлением или дистанционным с достаточно мощными управляющими элементами. Частота вращения и подача одноименных Судовые насосы и их эксплуатационные характеристикимарок насосов типов 11Р и 11Д совпадают. Конструкция этих насосов более сложна, при эксплуатации необходима остановка для промывки фильтров, при работе на холостом ходу и при малых подачах наблюдается нагрев рабочей жидкости за счет дросселирования масла.
Радиально-поршневой насос регулируемой подачи приведен на рис. 5 (четырехплунжерной гидравлической рулевой машины).
Этот насос устроен таким образом, что дает возможность при постоянном числе оборотов и при той же стороне вращения изменять подачу, направление нагнетания и всасывания.
Насос состоит из блока цилиндров 1, вращаемых электродвигателем, внутри которого могут поступательно двигаться вращающие вместе с цилиндрами скалки 2, связанные с башмаками 3, скользящими по регулировочному кольцу 4. Последнее имеет цапфы 5 и 6, удерживающие его от вращения и позволяющие перемещать его в горизонтальном направлении в корпусе 7.
Внутри блока цилиндров находится камера, разделенная неподвижной перегородкой 8 на две полости, которые сообщаются при помощи отверстий 9 и 10 с трубопроводом, соединенным с цилиндрами. Телемотором, действующим на цапфы 5 и 6, можно устанавливать регулировочное кольцо 4 в любое положение по отношению к центру вращения. Если кольцо 4 расположить концентрично к звездообразным цилиндрам, то они, вращаясь, будут увлекать за собой скалки, но последние, двигаясь вместе с системой цилиндров, не имеют поступательного движения, и подача насоса будет равна нулю (насос в положении в на рис. 5). Если сдвинуть регулировочное кольцо влево (положение а), то в этом случае при вращении по часовой стрелке в цилиндрах, расположенных выше оси цапф, происходит нагнетание через отверстие 9. Поршни нижних цилиндров, прижимаемые к башмакам центробежной силой, в это время будут через отверстие 10 всасывать жидкость. Рабочий эксцентриситет (смещение регулировочного кольца) для насосов некоторых серийных судов составляет ±13 мм, а для РЭГ4 – до ±24 мм. Если кольцо 4 передвинуть вправо, то поршни верхних цилиндров будут осуществлять всасывание через отверстие 9, а в нижних цилиндрах – нагнетание жидкости через отверстие 10. Чем дальше будет смещено регулировочное кольцо от своего среднего положения, тем больше будет подача насоса и тем быстрее происходит перекладка руля. Цапфы с регулировочным кольцом, при смещении которых перемещаются также и башмачки со штоками поршеньков, часто называют скользящим блоком.
Радиально-поршневые насосы рулевых машин регулируемой подачи выпускаются промышленностью серийно. Основные параметры судовых насосов регулируемой подачи приведены в таблице 3.
| Таблица 3. Основные параметры судовых радиально-поршневых насосов | ||||||
|---|---|---|---|---|---|---|
| Марка насоса | Подача (теоретическая), л/мин | Рабочее давление Pмакс, кгс/см2 | КПД при Pмакс | n, об/мин | Мощность привода, кВт | Масса, кг |
| НПМ-8 | 20 | 135 | 980 | 4,6 | 75 | |
| НПМ-6 | 40 | 135 | 980 | 9,8 | 135 | |
| НПМ-4 | 80 | 135 | 980 | 20 | 200 | |
| МНП-0,14 | 128 | 135 | 1 000 | 22 | 275 | |
| ЭМН-9/1 | 290 | 127 | 735 | 66 | 520 | |
| НПМ-5 | 400 | 135 | 750 | 89 | 750 | |
| НПМ-1 | 609 | 135 | 580 | 145 | 1 250 | |
| ЭМН-7 | 665 | 150 | 585 | 185 | 1 500 | |
| НПМ-3 | 785 | 135 | 585 | 185 | 1 500 | |
Эти насосы марки НРП имеют нечетное число цилиндров (7-9), что обеспечивает уменьшение пульсации подачи. Насосы типа МНП-0,14 установлены в серийных электрогидравлических машинах с моментом на баллере 20-60 тс·м.
Привод скользящего блока – рычажный с пружинным устройством или от поршней гидравлических цилиндров.
Насосы типа ЭМН выполнены по схеме насоса МНП-0,14, но ротор имеет 14 цилиндров, расположенных радиально в два ряда.
В рулевых машинах с вращающим моментом от 60 до 90 тс·м применяют модификацию насоса ЭМН-9/3, где установлены два вспомогательных насоса шестеренчатого типа (для возмещения утечки в Основные положения гидравлики и движение жидкости по трубопроводам суднатрубопроводах гидравлической системы и системы управления).
Роторно-шиберные насосы, как и другие насосы постоянной подачи, нашли применение в рулевых машинах. Марки насосов, применяемых в электрогидравлических рулевых машинах, приводятся при описании соответствующих машин.
Классификация и конструкции электрогидравлических рулевых машин
Электрогидравлические рулевые машины, помимо насосного агрегата рулевого гидропривода, имеют следующие основные узлы:
- систему управления насосами регулируемой подачи (или органы распределения рабочей жидкости – золотник для машин с насосами постоянной подачи);
- клапанные коробки и систему трубопроводов питания;
- предохранительные клапаны;
- компенсаторы динамических нагрузок;
- усилители;
- ограничители мощности и другие элементы.
Система трубопроводов электрогидравлической рулевой машины соединена с насосом этой машины. Система управления насосами соединена с телединамической передачей. Если машина имеет насос постоянной подачи, то распределительный золотник также имеет связь с телемотором. Авторулевой судна подключается к телединамической передаче или к золотнику распределения рабочей жидкости. Классификация рулевых машин электрогидравлического типа осуществляется по следующим признакам:
- по роду энергии, используемой для приведения в действие насосного агрегата, на электро- и парогидравлические;
- по конструктивному типу насоса – на машины с насосами регулируемой или постоянной подачи;
- по способу управления распределительными органами или насосами, приводом или рулем – на машины с простой или следящей системой управления распределительными органами, приводом и рулем. При наличии простой системы управления для поворота руля производятся отдельные операции по включению машины и ее выключению при достижении рулем необходимого угла перекладки. Рулевые машины с автоматическим управлением обеспечивают поворот руля судна без непосредственного участия человека. При следящей системе управления каждому углу поворота задающего органа (например, штурвала) соответствует пропорциональный по величине и согласованный по направлению угол поворота руля, который автоматически останавливается в заданном положении;
- по конструкции рулевого привода – на машины с нормальным плунжерным (двух- или четырехцилиндровым) приводом, плунжерным с секторно-кольцевыми плунжерами, лопастным (двух- и трехкрыльчатыми) и др.;
- по системе управления насосами – на машины с рычажной и валиковой системой управления.
Электрогидравлические рулевые машины могут иметь и другие особенности:
- гидроусилители (первого и второго каскада);
- ограничители мощности и т. д.
Рулевые машины с высоким крутящим моментом обеспечивают поворот руля судна при больших нагрузках. На находящихся в эксплуатации Основы маневренности крупнотоннажных судовкрупнотоннажных судах (в том числе танкерах) чаще установлены электрогидравлические рулевые машины с радиально-поршневыми насосами регулируемой подачи с нормальными плунжерными приводами со следящей системой управления. Средние и небольшие транспортные суда имеют электрогидравлические рулевые машины с насосами постоянной или регулируемой подачи.
Аксиально-поршневые насосы типа 11Д нашли распространение в связи с применением их в последних унифицированных гидравлических рулевых машинах серии «Р». Конструкции российских плунжерных электрогидравлических рулевых машин разработаны под руководством инженеров:
- В. Д. Гаврилова,
- И. С. Клячко,
- К. К. Воробьева,
- А. А. Тараканова и других.
Характеристики электрогидравлических рулевых машин приводятся после рассмотрения конструкций машин. На рис. 5 приведена четырехплунжерная электрогидравлическая рулевая машина с радиально-поршневым насосом регулируемой подачи, управляемым при помощи пускового электродвигателя или телемотора, передвигающего тягу рычажной системы управления (возможные направления передвижения показаны стрелками). Таким образом, при вращении штурвала точка d рычажного сервомотора переместится в положение d′ в связи с поворотом вокруг точки c (которая является неподвижной при неработающей машине). Точка b рычага также переместится вправо в точку b′. Так как цапфа 5 насоса шарнирно подсоединена к точке b, то последняя переместится вправо в положение, изображенное на рис. 5, в.
Включение в действие насоса вызывает всасывание рабочей жидкости из цилиндров I и IV и нагнетание ее в цилиндры II и III. Плунжеры 11, 12 переместятся влево, что вызовет поворот поперечины румпеля по часовой стрелке. Если на мостике прекращено вращение штурвала (положение точки d′ сервомотора зафиксировано), то перемещение плунжеров поставит рычаг в положение d′bc′, благодаря чему регулировочное кольцо 4 насоса будет возвращено в среднее положение и подача насоса будет выключена. Каждому углу поворота штурвала соответствует определенное (как по величине, так и по направлению) смещение dd′ и обратное смещение cc′, вызывающее выключение подачи насоса, а следовательно, и пропорциональный повороту штурвала угол поворота пера руля. Работа рулевой машины происходит по принципу следящей системы. Для предохранения системы трубопроводов от опасных перегрузок в машине предусмотрено гидравлическое компенсационное устройство 13.
Если в какой-либо паре цилиндров, например I и IV, от удара волны повысится давление выше допустимого, то клапан устройства 13 откроется и перепустит масло в цилиндры II и III. Рычаг dbc займет положение db′c′, и насос, включаясь автоматически в действие (без участия рулевого), вернет руль в положение, которое он занимал до воздействия повышенной внешней нагрузки. Для различных электрогидравлических рулевых машин подрыв клапанов устройства 13 происходит при давлении, превышающем наибольшее рабочее на 5-10 %. В рассматриваемом типе машин поворот руля на 5-10° при неподвижном штурвале сдвигает регулировочное кольцо и блок цилиндров насоса до упора, на величину максимального эксцентриситета. Угол отклонения руля может быть настолько велик, что кольцо насоса дойдет до упора, а плунжеры будут перемещаться, сжимая пружину в тяге dc. Машины, как правило, имеют два насосных агрегата. Для управления обоими насосами служит одна (рассмотренная) система рычагов. На прямых курсах обычно работает только один насос.
Недостатком рычажных систем управления насосами является невозможность использования полной подачи насосов.
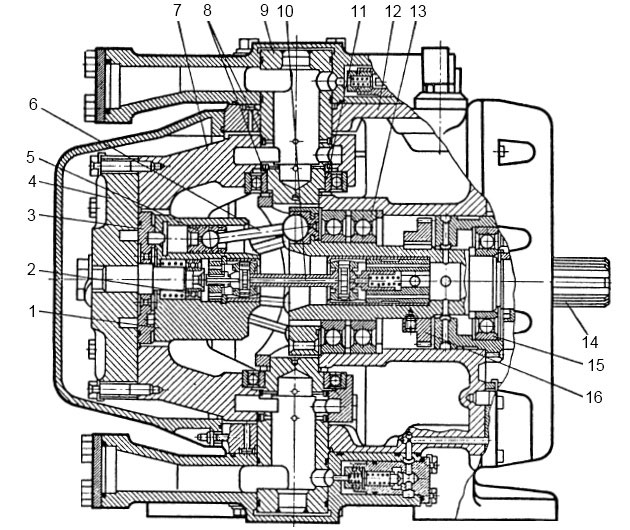
Четырехцилиндровый плунжерный привод позволяет при эксплуатации машины осуществлять различные варианты переключения и производить замену уплотнений любых цилиндров без выключения рулевой машины. На рис. 6 приведена схема гидравлической рулевой машины с лопастным приводом типа РЭГ ОВИМУ-7.
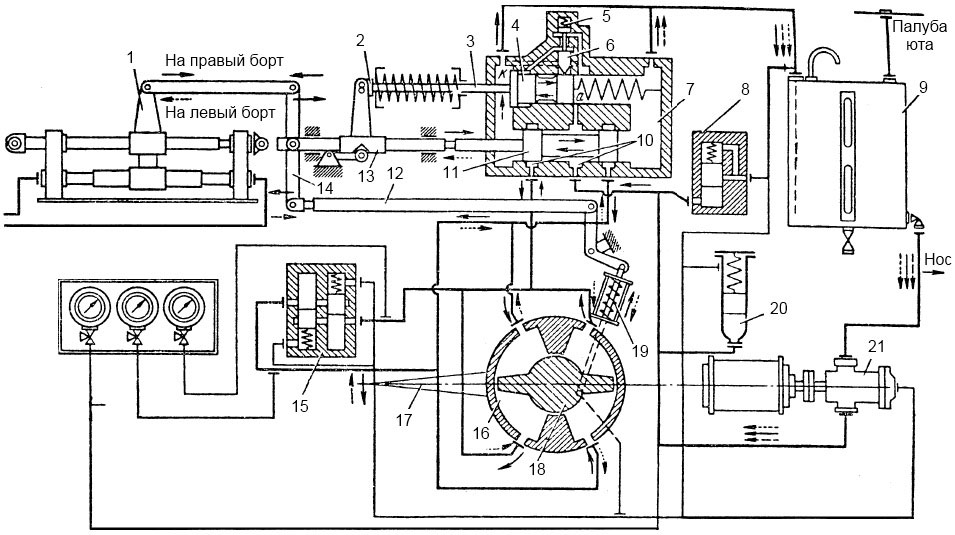
Эта машина разработана научно-исследовательским сектором Одесского высшего инженерного Список высших военно-учебных заведений Россииморского училища в двух вариантах, отличающихся различным конструктивным выполнением золотниково-распределительного устройства. Лопастной гидравлический привод в этой машине устанавливается непосредственно на баллере руля, что уменьшает ее габаритные размеры и позволяет вести монтажные и модернизационные работы, не выводя судно из эксплуатации.
Питание привода осуществляется лопастным насосом Г12-14ЛЗФ-70) постоянной подачи 73 л/мин с частотой вращения 1 000 об/мин и мощностью 5,6 кВт.
Гидравлическая рулевая машина работает при давлении рабочей жидкости 40 кгс/см2. Она состоит из:
- рабочего цилиндра 16;
- лопастного насоса 21 с электродвигателем;
- золотниково-распределительного устройства 7;
- сдвоенного перепускного клапана 15 привода;
- предохранительного клапана 8 насоса;
- пружинного буферного колпака 20;
- бака для рабочей жидкости 9;
- системы рычагов управления.
При среднем положении золотника 11, как показано на рис. 6, работа насоса 21 вызовет лишь циркуляцию рабочей жидкости по кольцу в направлении, указанном пунктирными стрелками. При этом жидкость, нагнетаемая насосом под золотник 11, возвращается в трубопровод через правое верхнее отверстие корпуса золотниковой коробки. При вращении штурвала, находящегося в рулевой рубке, например, в правую сторону каретка телемотора 1 перемещается вправо (в нос) в направлении, указанном сплошными стрелками, в результате чего шток золотника 11 перемещается вправо вместе с ним. Одновременно кулачковый механизм 13 перемещает разгружающий золотник 4 также вправо, вследствие чего закрывается канал а и жидкость, нагнетаемая насосом под золотник, выходит через окно, открытое золотником, трубопровод по направлению, указанному сплошными стрелками, к рабочему цилиндру 16. Рабочий цилиндр удерживается от вращения четырьмя лапами, прикрепленными к палубе, и имеет на внутренней поверхности неподвижные крылья. Как видно из рисунка, на вертикальном валу рабочего цилиндра закреплены лопасти, жестко соединенные со ступицей сектора ранее имевшейся на судне паровой рулевой машины.
При нагнетании жидкости в две диаметрально противоположные полости цилиндра вал с крыльями и баллер 18 руля 17 поворачиваются в данном случае против часовой стрелки. Поворот баллера вызовет перемещение рычага 12 сервомотора (обратная связь), при этом рычаг 14 поворачивается и смещает золотник до тех пор, пока закроются окна 10 золотниковой коробки, а кулачковое устройство 13 станет в первоначальное положение. Давление рабочей жидкости на кольцевую поверхность разгрузочного золотника 4 совпадает с направлением действия пружин, в результате чего этот золотник сместится и откроет канал а, вследствие чего возобновится циркуляция жидкости по кольцу, указанному пунктирными стрелками. В результате руль останется в переложенном на борт положении и показания аксиометра будут соответствовать ранее заданному углу перекладки. Можно проследить по схеме, что при вращении штурвала в левую сторону баллер повернется по часовой стрелке.
Фиксатор 6 с пружиной 5 предназначен для уменьшения ошибки между показаниями аксиометра и действительным положением пера руля. Фиксатор не позволяет золотнику 4 открыть окно а до полного закрытия золотником 11 окон 10, т. е. до установления руля на заданный угол. В рабочем положении системы, когда происходит перекладка руля и золотник 4, закрывая окно а, находится в правом положении, фиксатор под действием пружины находится в нижнем положении, вследствие чего кольцевая торцевая поверхность золотника 4 не испытывает давления, так как объем над ней соединен каналом К с отливной полостью. К концу маневра, когда в связи с прикрытием золотником 11 окон 10 давление в системе возрастает, фиксатор поднимается, преодолев давление пружины 5, и соединяет каналы полости высокого давления золотникового устройства с каналами, идущими к кольцевой поверхности, обеспечивая повышение давления на торцевую кольцевую поверхность золотника 4. Сила, образовавшаяся от давления на эту поверхность и совпадающая с ней по направлению действия пружины золотника 4, сместит его в первоначальное (допусковое) положение; окно а откроется, и давление в системе снизится.
Устройство фиксатора обеспечивает также разгрузку нагнетательной сети трубопровода при недопустимом повышении давления, выполняя в этом случае функции предохранительного клапана, хотя схемой предусматривается специальный предохранительный клапан 8, который срабатывает в случае заклинивания золотника 4 (в эксплуатации случаев заклинивания не наблюдалось). Рулевая машина может работать и без фиксатора 6. Если он выключен (поднят), то уменьшается точность отработки машиной заданных углов, однако нормы Регистра РФ соблюдаются.
Между рычагом управления 14 и баллером 18 в системе сервомоторов предусмотрена жесткая пружина 19, в нормальных условиях не работающая, но являющаяся демпфером при резких поворотах руля от ударов зыби. В последнем случае схемой предусматривается возможность перепуска рабочей жидкости из нагнетательных полостей рабочего цилиндра 16 во всасывающие окна через сдвоенный перепускной предохранительный клапан 15, который срабатывает при увеличении расчетной нагрузки на руль в 2,5 раза, т. е. при давлении 100 кгс/см2.
Описанная конструкция золотников распределительного устройства обеспечивает начало перекладки руля при перемещении распределительного золотника 11 на 3 мм и смещении разгрузочного золотника на 7 мм. Начало перекладки руля происходит при смещении каретки телемотора 1 на 6 мм, что соответствует повороту штурвала на 90° Указанная величина угла принята в связи с тем, что имеется в виду использование гидравлического телемотора без переделок, который обеспечивает также работу паровой рулевой машины (запасный привод).x. Заданный поворот штурвала может быть уменьшен за счет удлинения толкателя 3 разгрузочного золотника при регулировании системы путем вывинчивания его из развилки 2. При этом первоначальное живое сечение перепускного окна а уменьшится и потребуется меньший ход разгрузочного золотника до начала перекладки руля.
Распределительный золотник 11 обеспечивает полное открытие окон 10 при повороте штурвала на 1,5 оборота. При повороте штурвала на 40-60° окна открываются на 1-1,5 мм и насос перекачивает жидкость в цилиндр со скоростью 15 м/с. Чувствительность установок может быть повышена за счет уменьшения ширины окна а при определенном изменении золотника. В последней модели рулевой машины ее пуск осуществляется за 0,1 с.
Сервомотор обеспечивает работу машин и в том случае, когда в процессе Закономерности движения крупнотоннажных судов при перекладке руляперекладки руля удар волны (или другое внешнее воздействие) заставит сработать механизм возврата золотника, так как при этом руль несколько отклонится и своим движением посредством сервомотора снова закроет окно а, после чего поворот руля будет продолжаться до заданного угла перекладки.
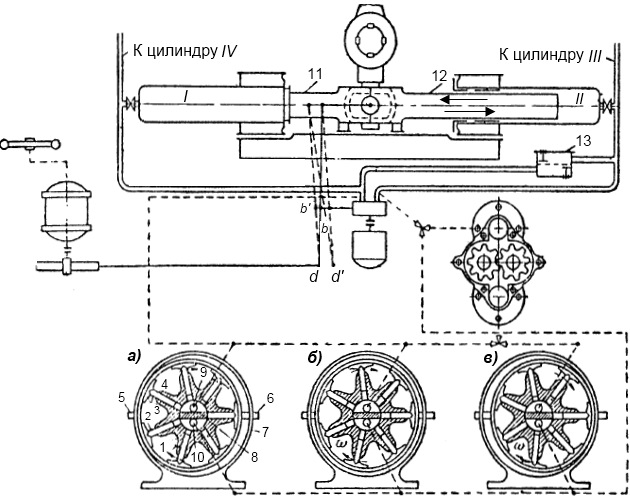
Рулевая машина, предложенная В. В. Завишей, имеет вращающий момент на баллере при работе РЭГ-ОВИМУ-7 7-8 тс·м, наибольшее давление, развиваемое насосом, не превышает 65 кгс/см2. Сухая масса машины (с одним комплектом оборудования) – 1 600 кг. На рис. 7 приведена схема РЭГ с валиковой системой управления насосами переменной производительности.
Такая машина, с четырехплунжерным рулевым приводом и двумя насосами НРП, имеет широкое распространение на российских серийных судах.
Управление машиной предусмотрено из румпельного отделения или с мостика. В первом случае вращение штурвала 1 через цепную передачу 2, при выключенной кулачковой муфте 3, передается валику 8, через систему конических передач – задающим валикам 16. Муфта 3 двусторонняя, каждое из положений ее переводного рычага фиксируется стопором.
Конические шестерни 24 задающих валиков 16 (рис. 7, б), расположенные, как и все планетарное устройство, в корпусах кулачковых дифференциалов 15, вращают планетарные шестерни 25, которые, бегая по неподвижным (в первый момент) шестерням 22 валиков обратной связи 14, наклоняют траверсы 23 и закрепленные на них секторы С. При наклоне секторов С (рис. 7, в) их зубья (кулаки) выходят из впадин рычагов 27, в которых они находились, фиксируя среднее положение этих рычагов и нулевую подачу насосов, наклоняют рычаги 27 и сидящие с ними на одной оси рычаги 26, 29. При некотором наклоне рычагов 26 (положение I или II) ролики 28 выходят из впадин колец, выкатываются на их круглую поверхность, наклоняют рычаги 29 на небольшой угол, перемещают тяги 31, поворачивают рычаги 32 относительно точки O и, смещая тягу 30, запускают насос 19 на полную подачу.
Предлагается к прочтению: Рулевое устройство и авторулевой системы управления судном
При перекладках руля на значительные углы и достаточно быстром вращении от штурвала валиков 16 насосы будут развивать полную подачу, что является положительной особенностью валиковых систем с кулачковыми дифференциалами. Подача масла насосом или двумя насосами (если включены оба насоса) вызывает перемещение плунжеров привода, перекладку руля, перемещение реек 12 и вращение шестерен 13, стоящих на валиках обратной связи 14. Вращение конических шестерен 22 будет также воздействовать на планетарные шестерни 25 в обратном направлении; при этом наклонение траверс 23 приостановится. При прекращении вращения штурвала валики 16 и шестерни 24 остановятся. Валики 14 и шестерни 22 вернут («отработают») траверсы, секторы С, всю систему рычагов и тяг к насосу в среднее положение. Пружины 18, оттягивающие скользящие блоки насосов в среднее положение, обеспечат совпадение впадины рычагов 27 с зубьями секторов С и попадание роликов 28 в выемки K.
Таким образом, при управлении штурвалом 1 каждому углу поворота штурвала соответствует определенный наклон траверс 23, определенное перемещение плунжеров привода, возвращающее их в исходное положение, и определенный угол поворота руля, т. е. рулевая машина в этом случае работает по принципу следящих систем.
Чтобы контролировать положения руля, рулевой может пользоваться обычным механическим аксиометром, связанным с валом штурвала. Для управления машиной с мостика применяется простая (неследящая) электрическая система телеуправления. В этом случае муфта 3 подключается к трубчатому валику 4 муфты Федорицкого. При повороте штурвала на мостике в какую-либо сторону из среднего положения включается сначала первая, затем вторая, а в некоторых конструкциях и третья наибольшая скорости мотора дистанционного управления 6 (работает только один мотор, второй является резервным). От мотора дистанционного управления вращается одна из червячных шестерен 7, которая внутренним коническим ободом приводит во вращение планетарные шестерни 5, бегающие по неподвижному коническому ободу второй шестерни 7, в результате чего вращаются крестовина 9 и трубчатый вал 4. Последний посредством муфты 3 вращает валик 8, который через системы конических пар передает вращение валикам 16. В дальнейшем включение подачи насоса 19 и выключение ее обратной связью (отработкой) осуществляется так же, как и при управлении штурвалом 1.
Нижняя часть корпуса муфты Федорицкого служит масляной ванной. Заливка масла производится через отверстие с пробкой в верхней части корпуса. Для контроля за уровнем масла и для его спуска в нижней части имеются нарезные отверстия с пробками. Смазка втулок, крестовины, ступиц, червячных колес, звездочки и вкладыша производится при помощи колпачковой масленки через отверстия в теле вала и крестовины.
Управляя машиной с мостика, рулевой по положению штурвала не знает о положении руля. Ему известно лишь направление перекладки. Поэтому, чтобы остановить руль в нужном положении, рулевой следит за стрелкой задающего аксиометра 21 (приводится в действие от валиков 16 цепной передачей 17) и при приближении последней к желаемому углу отклонения возвращает штурвал в среднее положение. При этом выключается мотор дистанционного управления. О точности Проверки перед маневрированиемвыполнения маневра судят по положению стрелки исполнительного аксиометра 11, который тягой 10 соединен с баллером. Расхождение показаний задающего и исполнительного аксиометров не должно превышать 2°.
Подача каждого насоса регулируемой подачи достаточна для перекладки руля с борта на борт за 25-28 с. Обычно в рейсе работает один из насосов.
Следует отметить, что наряду с некоторыми положительными качествами валиковых систем, например возможностью использования подачи насосов при перекладках руля на большие углы, им свойственны и некоторые недостатки: большая сложность и стоимость системы и, в частности, большие трудности в совместной регулировке и установке насосов на нулевую подачу при разном износе правого и левого участков валиковой системы. Необходимо, чтобы слабины на участках и износы соответствующих конических шестерен в коробках передач были одинаковыми. Поэтому следует следить за тем, чтобы наработка и условия работы правого и левого НРП были также одинаковыми. В этом случае при одновременной работе двух насосов во время прохождения узкостей и сложном маневрировании надежность работы рулевого устройства будет повышаться. Если же износы правой и левой частей системы разные и по этой или другой причине произошло рассогласование нейтральных положений скользящих блоков насосов, то подключение второго насоса не всегда повысит надежность системы и машины. Может случиться, что при наличии различных слабин в правом и левом участках валиковой системы регулировочное кольцо одного из насосов возвратится в среднее положение раньше второго. Последний, продолжая подавать масло в полости рулевого привода, обратной связью включит первый насос на подачу в противоположном направлении. Тогда пуск второго насоса может вызвать нагревание масла, удары и шум в системе. Наибольшая температура масла в машине не должна превышать 70 °С.
Для установки регулировочных колец (скользящих блоков) НРП в среднее положение на их опорных цапфах (со стороны тяг 30 на рис. 7) делают метки, совпадение которых со стрелками на корпусах соответствует нулевой подаче. Одновременное совпадение этих меток для правого и левого насосов является обязательным условием возможности их совместной работы, за чем следует следить в период эксплуатации РЭГ. Если насосы правого и левого участков валиковой системы и передач одинаковы, то регулировкой длин тяг 30 и 31 можно достигнуть совмещения меток и согласованной работы насосов. В рычажных системах точное согласование параллельной работы и устранение неодинакового износа правого и левого участков достигается относительно легче: райберовкой отверстий с установкой новых соединительных пальцев рычагов.
На рис. 8 приведена схема рулевого устройства с включением гидроусилителей к НРП.
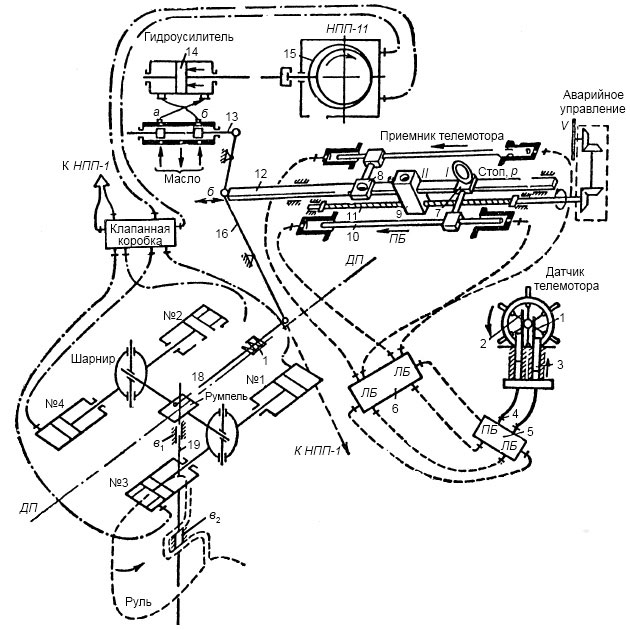
1 – ведущая шестерня; 2 – зубчатые рейки; 3 – поршни датчика; 4 – импульсный трубопровод; 5, 6 – клапанные коробки; 7, 8, 9 – ползуны; 10 – шток; 11 – винт; 12 – тяга приемника телемотора; 13 – шток золотника; 14 – поршень гидроусилителя; 15 – эксцентриковое колесо НПП; 16 – рычаг; 17 – буферное пружинное устройство; 18 – тяга обратной связи; 19 – баллер.
– · – · – · – – трубопровод рабочего масла; – – – – – импульсный телепровод
Управление НРП осуществляется из рулевой рубки с помощью гидравлического телемотора, воздействующего на гидроусилитель, который в свою очередь воздействует на цапфы регулировочного кольца для изменения эксцентриситета в НРП.
Гидроусилители устанавливают в машинах с моментом на баллере 60, 120 тс·м и более.
Для поворота руля, например, на правый борт рулевой поворачивает штурвал датчика телемотора вправо. При этом штурвал вращает шестерню 1, которая перемещает зубчатые рейки 2, соединенные со скалками плунжерных насосов, подающих рабочую жидкость (смесь воды и глицерина) по трубопроводу 4. Импульс передается приемнику телемотора, расположенному в рулевом отделении, через клапанную коробку 6 (к приемнику телемотора левого или правого борта).
Переключение на тот или иной борт осуществляется с помощью стопора. Если, например, включен приемник правого борта, шток 10 начинает перемещаться влево и через ползун 7 передвигает тягу 12. Последняя через систему рычагов воздействует на штоки 13 обоих золотников гидроусилителей. С помощью гидроусилителя слабый импульс датчика телемотора преобразуется в мощное усилие, достаточное для создания эксцентриситета в НРП.
Гидроусилитель состоит из золотника и силового цилиндра. При перемещении штока 13 открывается окно а или в для прохода масла к поршню 14. Рабочая жидкость в гидроусилитель поступает от специального насоса, приводимого от вала НРП или от независимого привода. Движение поршня передается блоку 15 насоса, в котором изменяется эксцентриситет, и начинается подача масла в цилиндры №2 и 3. В результате руль перекладывается на правый борт. Как только румпель придет в движение, начинает перемещаться и тяга обратной связи 18, закрепленная на голове баллера. Тяга предназначена для выключения НРП при приходе руля в заданное положение. Тяга обратной связи перемещает всю систему рычагов управления НРП в направлении, обратном первоначальному движению.
Например, при перекладке руля на правый борт точка А закрепления тяги на румпеле движется в корму, что приводит в действие всю систему управления НРП. При этом точка Б тяги 12 перемещается в нос ровно настолько, чтобы эксцентриситет в насосе стал равным нулю. Это значит, что для возвращения руля в диаметральную плоскость нужно вращать штурвал влево.
В этой системе необходимо обеспечить среднее положение поршней и золотников гидроусилителей при среднем положении скользящих блоков НРП и среднем положении штурвала.
В случае повреждения системы гидравлического телемотора предусмотрено управление РЭГ с помощью тумбы механического аварийного управления. При этом стопор приемника телемотора переставляют из положения I в положение II, присоединяя тем самым тягу 12 к ползуну 9. Поворачивая штурвал аварийного управления, приводят в движение через конические передачи винт 11, по которому перемещается ползун 9 и передвигает тягу 12 и всю остальную систему управления НРП.
Некоторые электрогидравлические рулевые машины имеют аварийный насос регулируемой производительности. В случае выхода из строя основных НРП или повреждения системы электропитания судна рулевая электрогидравлическая машина приводится в действие аварийным НРП. В рулевом отделении устанавливают аварийный агрегат, состоящий из НРП с дизельным приводом. Дизель вращает НРП, который по специальному трубопроводу нагнетает масло в цилиндры привода руля. Насосом управляют с помощью маховика. Чтобы правильно выдерживать заданный курс, необходимо знать, в каком положении находится руль. Для этого на голове баллера закреплена рейка, которая перемещается вместе с баллером. Ее движение передается электрическому датчику, который подает сигналы в посты управления, где установлены аксиометры. (Стрелка аксиометра движется по циферблату, отградуированному в градусах поворота пера руля (от 0 до 40°). Кроме того, на тумбе датчика гидравлического телемотора имеется стрелка, которая показывает, на какой приблизительно угол должен повернуться руль при повороте штурвала. Наконец, на приводе баллера закреплена планка со шкалой, отградуированной в градусах поворота руля. Над этой шкалой движется стрелка, соединенная с ползуном плунжера и указывающая по шкале угол поворота руля. В румпельном помещении имеется механический показатель положения пера руля, состоящий из рычагов и шестерен, передающих движение румпеля стрелке. Последняя, вращаясь, отмечает на циферблате угол поворота руля.
На танкерах типа «София» водоизмещением 62 560 т установлена рулевая машина РЭГ4, которая имеет два каскада гидравлического усиления механизма управления НРП, что связано с большей мощностью машины и необходимостью большего усилия для перемещения регулировочного кольца (скользящего блока) (табл. 4).
| Таблица 4. Основные характеристики РЭГ-4 | |
|---|---|
| Наибольший вращающий момент на румпеле, развиваемый машиной, при угле поворота руля 35°, тс·м | 125 |
| Наибольший угол поворота руля от диаметральной плоскости на борт, град | 35 |
| Длительность перекладки румпеля с борта на борт на угол 2×35 °C | 30 |
Управление машиной осуществляется с одного из двух внешних постов или непосредственно из румпельного отделения. От сельсинов-датчиков, находящихся в посту управления, импульс воспринимается сельсинами-приемниками, имеющимися в приборе ПУ1-2. Принципиальная схема прибора ПУ1-2 показана на рис. 9.
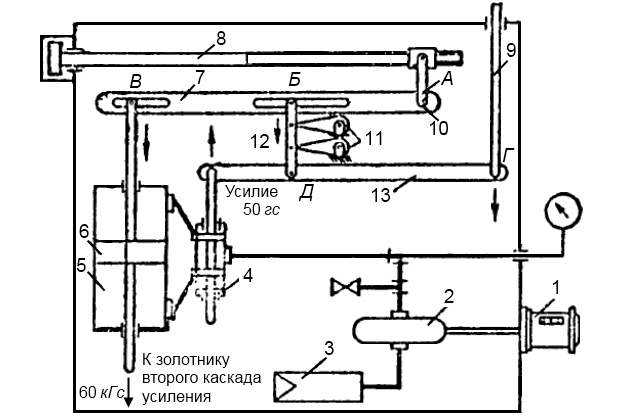
1 – электродвигатель; 2 – шестеренчатый насос; 3 – масляная цистерна; 4 – золотник; 5 – цилиндр первого каскада; 6 – поршень; 7 – рычаг обратной связи; 8 – регулировочный винт; 9 – тяга А; 10 – ось подвеса рычага связи; 11 – рычаг В; 12 – тяга Б; 13 – дифференциальный рычаг
Являясь первичным каскадом гидроусилителя, прибор ПУ1-2 использует импульс сельсина-приемника усилием около 50 гс и обеспечивает перемещение золотника, чем открывает доступ масла в цилиндр первого каскада усиления. Под давлением масла (8-10 кгс/см2), подаваемого шестеренчатым насосом, поршень в цилиндре первого каскада перемещается и своим штоком сдвигает из среднего положения золотник второго каскада усиления (усилие около 40 кгс/см2). При движении поршень цилиндра первого каскада усиления поворачивает рычаг обратной связи относительно точки А и возвращает золотник в среднее положение.
Золотники гидроусилителей позволяют изменять направление потока масла в системе гидроусилителя и тем самым – направление движения цапф регулировочного кольца (скользящего блока) насоса в необходимом направлении. Гидроусилитель второго каскада создает усилие в 2 400 кгс, достаточное для преодоления сопротивления при перемещении скользящего блока НРП этой рулевой машины. Гидроусилитель второго каскада устроен так же, как и гидроусилитель на рис. 9 выше.
Будет интересно: Рулевые устройства судна. Дефектация и ремонт
Механизм управления насосами обеспечивает раздельное и одновременное управление насосами как из дистанционных постов, так и штурвалом ручного управления. С механизмом управления связан датчик электрических указателей. Переключением клапанов на клапанной коробке (системы главного масляного трубопровода) возможно отключение любого насоса и любой пары смежных или соосных цилиндров привода к баллеру в случае аварии.
Для уменьшения нагрузок насосов и моторов применяются ограничители мощности. При повышении давления они уменьшают величину эксцентриситета насосов, что достигается ограничением возможного наклона рычагов 1 и 2 (рис. 10).
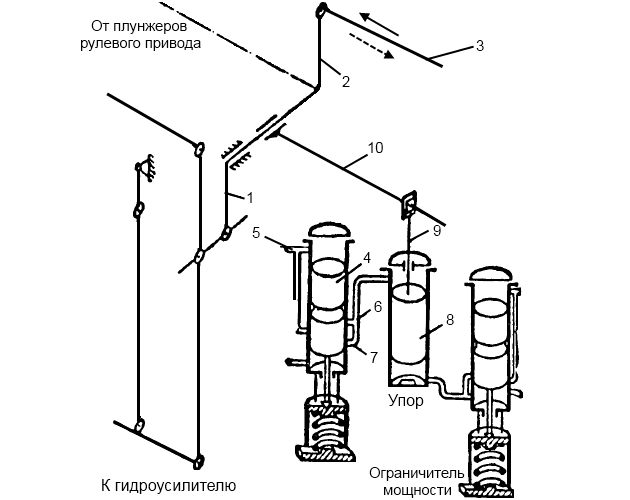
Если в одной из полостей насоса регулируемой подачи, соединенной с ограничителем мощности трубками 5, давление поднимается до 65 % наибольшего рабочего давления, то поршень одного из крайних цилиндров ограничителя, например 4, пойдет вниз, сообщит посредством кольцевой выточки трубки 5 и 6 и перекроет трубку 7. Поршень 8 среднего цилиндра ограничителя силой давления будет удерживаться в крайнем нижнем положении и тягой 9 с проушиной на конце ограничит подъем рычага 10 и поворот рычага 2 влево, что уменьшит подачу насоса и нагрузку на его электромотор, так как сделает невозможным дальнейший поворот тяги 3, включающей подачу НРП.
Опыт эксплуатации электрогидравлических рулевых машин:
- РЭГ-13;
- РЭГ-7;
- РЭГ-3;
- РЭГ-2;
- РЭГ-11;
- РЭГ-4,
обеспечивающих перекладку руля с моментом на баллере:
- 10,
- 15,
- 30,
- 45,
- 90,
- 125 тс·м соответственно,
и иностранных марок электрогидравлических машин позволил в 60-х годах разработать типизированную конструкцию электрогидравлических рулевых машин серии «Р».
По конструктивным признакам и комплектующему оборудованию эти электрогидравлические машины подразделяются на три группы:
- первая группа – машины Р01, Р03, Р05, Р07, Р09 имеют двухцилиндровый плунжерный привод и один насос постоянной подачи;
- вторая группа – машины Р11, Р13 (рис. 11) имеют также двухцилиндровый привод с соосным расположением цилиндров и двумя насосами регулируемой подачи;
- третья группа – машины Р15, Р16, Р17, Р18, Р19, Р21, Р22 (рис. 12) имеют четырехцилиндровый привод и два насоса регулируемой подачи.
В состав насосного агрегата рулевых машин первой группы входят:
- распределительный золотник;
- клапанная коробка;
- предохранительный клапан;
- и фильтр.
Все узлы насосного агрегата смонтированы на общей раме.
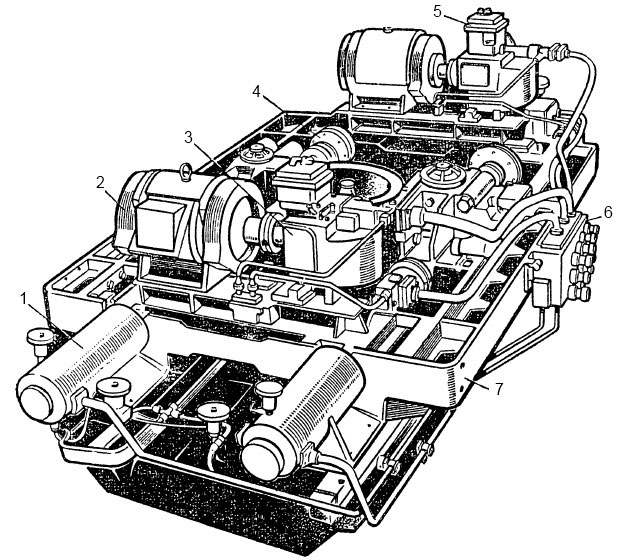
Представленные на рис. 11 и 12 машины типа «Р» имеют обозначения:
- 1 – цилиндры гидравлического плунжерного привода;
- 2 – электродвигатели аксиально-поршневых насосов регулируемой подачи;
- 3 – насосы;
- 4 – поперечные румпели;
- 5 – электромеханические узлы управления подачей и реверсом потока масла насосов, блокированные с задающими органами системы управления машиной и обратными связями от баллера руля;
- 6 – клапанные коробки с распределительными и перепускными предохранительными клапанами масляной системы;
- 7 – продольные связи рамы машины, образующие с внутренней стороны параллели для ползунов привода.
Насосный агрегат устанавливается на Крепление механизмов на фундамент суднасудовом фундаменте отдельно от привода баллера. Имеется также аварийный ручной привод.
В рулевых машинах второй и третьей групп установлены аксиально-поршневые насосы типа 11Д, каждый из которых обеспечивает спецификационную характеристику рулевой машины определенного типоразмера. Насос соединен с электродвигателем при помощи эластичной муфты и установлен на общей раме, к которой крепится также коробка предохранительных клапанов насосов. Эта рама устанавливается на цилиндрах привода баллера.
Элементы гидравлической системы рулевых машин связаны между собой трубопроводами. Масляный трубопровод состоит из главного (соединяющего насосы с цилиндрами привода баллера через клапанные коробки) и вспомогательных трубопроводов, а также трубопровода манометров. Рулевые машины снабжены комплектом контрольно-измерительных приборов, обеспечивающих нормальную эксплуатацию.
Рулевые машины всех групп предназначены для перекладки одного руля. Машины с малым моментом на баллере предназначены для небольших судов смешанного плавания (река-море).
Ряд машин серии «Р» включает электрогидравлические рулевые машины 12 типоразмеров и 7 модификаций (машины на два руля). При этом 9 типоразмеров ряда заменяют 36 типоразмеров электрогидравлических и электрических рулевых машин, находившихся до последнего времени в эксплуатации.
Система управления новыми рулевыми машинами электрическая дистанционная с электрической связью и обеспечивает три вида управления:
- автоматическое (авторулевой);
- симпатическое (следящая система);
- простое дистанционное.
Электропривод насосов рулевых машин работает на переменном токе 380 В или постоянном токе 220 В.
Система дистанционного управления представляет собой сочетание:
- электрических,
- механических,
- гидравлических элементов,
и наиболее полно отвечает требованиям эксплуатации. Исполнительный механизм системы управления в рулевых машинах первой группы воздействует на распределительный золотник и установлен на раме насосного агрегата; в рулевых машинах второй и третьей групп исполнительный механизм регулирует наклон цилиндрового блока насоса регулируемой подачи и размещается непосредственно на корпусе насоса.
Основные характеристики приводов плунжерных электрогидравлических машин приведены в таблице 5.
| Таблица 5. Основные характеристики приводов плунжерных электрогидравлических машин | ||||||||
|---|---|---|---|---|---|---|---|---|
| Индекс машины | Номинальный вращающий момент, тс·м, развиваемый | Насосы | Электродвигатели В числителе приведены данные, относящиеся к электродвигателям на 380 В, в знаменателе – на 220 В (имеются в виду электродвигатели основных насосов.x | Масса Имеется в виду масса жидкости, заливаемой в гидросистему рулевой машины.x рабочей жидкости, кг | ||||
| машиной | запасным приводом | Количество (основной привод) | Тип привода | Подача основного привода л/мин | Мощность, кВт | Скорость вращения, об/мин | ||
| Р01 | 0,63 | 0,15 | 1 | 11МN-0,5 | 4,2 | 80 | ||
| Р03 | 1,0 | 0,25 | 1 | 11М№0,5 | 7,5 | 80 | ||
| Р05 | 1,6 | 0,4 | 1 | 7,5 | 90 | |||
| Р07 | 2,5 | 0,63 | 1 | 12,8 | 100 | |||
| Р09 | 4,0 | 1,0 | 1 | 22,0 | 180 | |||
| Р11 | 6,3 | 1,6 | 2 | 34,0 | 180 | |||
| Р13 | 10,0 | 2,5 | 2 | 40,0 | 200 | |||
| Р15 | 16 | 4 | 2 | 63,0 | 250 | |||
| Р17 | 40 | 10 | 2 | 161 | 550 | |||
| Р19 | 80 | 20 | 2 | 320 | 735 | 900 | ||
| Р21 | 125 | 31,5 | 2 | 465 | 72 | 735 | 1 300 | |
При разработке типизированной конструкции электрогидравлических рулевых машин значительное внимание было уделено унификации отдельных узлов и деталей, а также комплектующих изделий. Так, аксиально-поршневые насосы переменной производительности в рулевых машинах второй и третьей групп имеют единую кинематическую схему и отличаются только геометрическими размерами. В рулевых машинах Р11-Р15 использован насос только одного типоразмера – 11Д №5, в машинах же Р17 и Р18 – насос 11Д №20. Рулевые машины указанных групп имеют единую принципиальную схему трубопроводов, показанную на рис. 13.
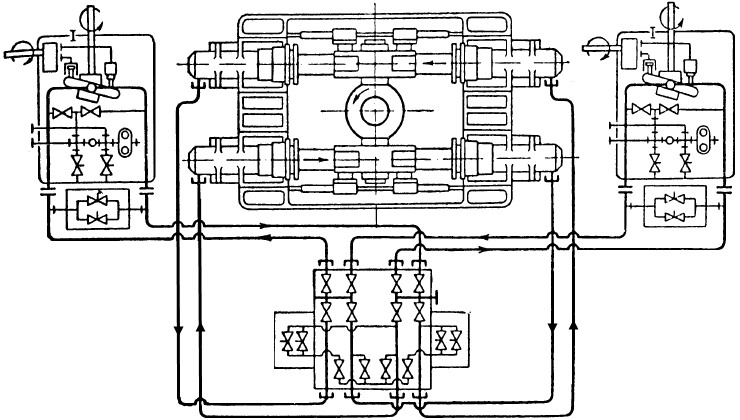
Полностью унифицирована для всего типизированного ряда система управления. Приводы баллера двухцилиндровых Р11 и Р13 и четырехцилиндровых рулевых машин Р15 и Р16 унифицированы и составлены из одинаковых элементов (за исключением румпелей). Два типоразмера масляных цистерн применяют для рулевых машин девяти типоразмеров.
Унификация насосов, узлов привода баллера, масляных цистерн, арматуры позволила свести до минимума количество диаметров труб, примененных в трубопроводах электрогидравлических рулевых машин типизированного ряда. Особенно высокая степень унификации деталей достигнута по смежным типоразмерам. Например, рулевые машины Р17 (Мбал = 40 тс·м) и Р18 (Мбал = 63 тс·м) состоят из 533 деталей, из которых 436 являются общими для указанных рулевых машин.
С 1968 г. все новые транспортные и Промысловые добывающие и перерабатывающие судапромысловые суда российской постройки оснащаются электрогидравлическими рулевыми машинами типизированной конструкции серии «Р».
Следует отметить, что на танкерах типа «Крым» (150 тыс. т) устанавливается рулевая машина марки Р26. Эта машина развивает вращающий момент на баллере 400 тс·м при массе 52 т, в то время как, например, рулевая машина танкеров типа «София» при вращающем моменте в 120 тс·м имела массу свыше 38 т. Уменьшение массы, приходящейся на единицу вращающего момента, достигнуто за счет повышения давления рабочей жидкости до 200 кгс/см2. Кроме того, плунжеры машины изготовлены пустотелыми. В целях упрощения изготовления при проектировании машины учитывались технологические требования, например, рабочие цилиндры машины выполнены со съемными донышками. Это значительно упростило обработку рабочих поверхностей цилиндра, требования к которым по шероховатости в связи с увеличением рабочего давления значительно повышены. По той же причине – с повышением давления – рабочие поверхности плунжеров обработаны с более высокой степенью точности, чем обычно.
Обычная шарнирная схема передачи усилия в машине марки Р26 заменена кулисной. Подача каждого из двух насосных агрегатов этой машины составляет 850 л/мин. Машина марки Р26 снабжена системой управления типа «Аист 1-10».
Сравнительная оценка различных рулевых машин
Сравнивая различные рулевые машины и их приводы, необходимо отметить, что паровая машина, ранее имевшая наибольшее распространение, вытеснена электрическими и электрогидравлическими машинами. Бесспорные преимущества рулевых машин с электродвигателем очевидны, если учесть, что подготовка к действию паровой рулевой машины занимает 1-2 ч, в то время как электрическая рулевая машина практически может быть всегда готова к действию. Кроме того, электрические рулевые машины занимают меньше места по сравнению с паровыми и по массе не тяжелее их при одинаковой мощности. Электрические рулевые машины более надежны в работе, так как современные электродвигатели работают безотказно в любых условиях, а при специальном исполнении – даже в затопленном помещении. Электрические рулевые машины выгодно отличаются от паровых своей экономичностью. Сравнение затрат энергии на приведение в действие рулевых машин, развивающих одинаковый вращающий момент на баллере, показывает, что электрическая рулевая машина в 5-6 раз экономичнее паровой. Электрические рулевые машины не нуждаются в такой частой проверке их состояния, как паровые, в связи с отсутствием у них приводов в виде зубчатых колес, цепей Галля и др., износ которых может вызвать нарушение точности механической передачи, и т. д.
Электрические рулевые машины типа РЭР имеют удельные массы 100-70 кг/тс·м для моментов на баллере 2-3 тс·м и 50 кг/тс·м для моментов 15 тс·м.
Однако как паровые, так и электрические рулевые машины с механическими передачами имеют близкий по значениям КПД (учитывающий потери на пути от головы баллера до вала двигателя), при полной расчетной нагрузке равный 0,25-0,4. У электрогидравлических же рулевых машин значения КПД находятся в пределах 0,5-0,75. Перспективность их обусловлена также сравнительно меньшими габаритными размерами, большей надежностью, бесшумностью работы, неприхотливостью к климатическим условиям и большими значениями развиваемого вращающего момента.
Рекомендуется к прочтению: Составные части рулевых устройств и предъявляемые к ним требования
Гидравлические рулевые машины нашли широкое применение также на малых судах, поэтому российская промышленность выпускает их для обеспечения момента на баллере от 0,25 до 125 тс·м, а для супертанкеров – 400 тс·м и более.
Сравнительная оценка рулевых машин электрогидравлического типа, находящихся в эксплуатации на современных судах, необходима ввиду разнообразия их конструкций. Так, в машинах с НРП при перекладке пера руля даже на большие углы имеет место неполное использование подачи насоса. Для избежания этого применяют насосы постоянной подачи, стоимость которых к тому же в 50, а иногда и в 100 раз меньше. В рулевых машинах с валиковыми системами управления насосами регулировка насосов для их совместной работы относительно сложна. Точность отработки заданного угла у них меньшая, чем рулевых машин с рычажными системами управления. Электрогидравлические рулевые машины крупнотоннажных судов усложнены применением двухступенчатых гидроусилителей мощности. Хотя плунжерные электрогидравлические машины легче негидравлических, все же их масса остается значительной, особенно машин с насосами, установленными вне привода. Даже для больших мощностей удельная масса плунжерных машин только в отдельных случаях снижена до 200 кг/тс·м. Кроме того, эти машины громоздки.
Обслуживание и ремонт судовых рулевых машин, в том числе и электрогидравлических с НРП сложен, которые в отдельных случаях и менее надежны в эксплуатации. В наиболее простых электрогидравлических рулевых машинах с НРП из-за несовершенства их конструкции происходит нагрев масла до 60-70 °С. Кроме того, в этих машинах очень высок расход энергии на холостом ходу (35 % расхода полной мощности). Стоимость 1 тс·м для электрогидравлических машин с нормальным четырехплунжерным приводом и НРП российского производства составляет при мощности на баллере 20 тс·м свыше 1 000 руб и несколько снижается для более мощных машин (при 30 тс·м – около 700 руб, при 60 и 90 тс·м – около 670 руб на 1 тс·м). Стоимость 1 тс·м для электрогидравлических рулевых машин с насосом постоянной подачи сравнительно меньшая, например:
- для РЭГ ОВИМУ-7 – 345 руб/тс·м;
- для машин норвежского и датского изготовления – 750-550 руб/тс·м.
В итоге следует отметить, что электрогидравлические рулевые машины отличаются большей живучестью, так как они обычно имеют много дублированных узлов, позволяющих продолжать работу при авариях.

- Александров А. В. Судовые системы. Л., «Судостроение». 1966. 200 с.
- Богомольный А. Е. Судовые вспомогательные и рыбопромысловые механизмы. Л., «Судостроение», 1971. 384 с.
- Валдаев М. М. Гидравлические приводы судовых палубных механизмов. Л., «Судостроение», 1973. 295 с.
- Гурович А. Н. и др. Судовые устройства. Справочник. Л., «Судостроение», 1967. 412 с.
- Дубровский О. Н., Руфин Б. А., Артамонов М. Н. Гидравлические приводы судовых механизмов. Л., «Судостроение», 1969. 383 с.
- Ермилов В. Г. Эксплуатация испарительных установок теплоходов. М., «Транспорт», 1969. 92 с.
- Епифанов Б. С. Судовые системы. Л., «Судостроение», 1973. 136 с.
- Завиша В. В., Декин Б. Г. Судовые вспомогательные механизмы. М., «Транспорт», 1974. 392 с.
- Инструкция по химической очистке судовых испарителей. ММФ, 1968.
- Коваленко В. Ф. и др. Водоопреснительные установки морских судов. М., «Транспорт», 1964. 304 с.
- Кравченко В. С. Монтаж судовых вспомогательных механизмов. Л., «Судостроение», 1968. 219 с.
- Михайлов С. С., Мартынов Б. М. Пневматические приводы судовых механизмов и устройств. Л., «Судостроение», 1974. 190 с.
- Петрина Н. П. Судовые насосы. Л., Судпромгиз, 1962, 376 с.
- Плявин Н. И. Эксплуатация морского танкера. М., «Транспорт», 1968. 336 с.
- Правила классификации и постройки морских судов. Регистр СССР. Л., «Транспорт», 1967. 311 с.
- Правила классификации и постройки морских судов. Регистр СССР. Л., «Транспорт», 1970. 855 с.
- Правила техники безопасности на судах морского флота. М., Реклам-бюро ММФ, 1970.
- Правила технической эксплуатации судовых вспомогательных механизмов и оборудования. М., «Транспорт», 1975.
- Правила технической эксплуатации корпуса, помещений, устройств и систем судна. М., «Транспорт», 1965. 164 с.
- Положение о технической эксплуатации морского флота. М., Реклам-бюро, 1973. 151 с.
- Справочник судового механика. Т. 2. Под ред. Л. Л. Грицая. М., «Транспорт», 1974. 697 с.
- Шмаков М. Г. Рулевые устройства судов. Л., «Судостроение», 1968. 364 с.
- Ясинский А. С. Судовые паросиловые установки. М., «Транспорт», 1969. 192 с.





