Морской флот на протяжении всей истории человечества оставался ключевым звеном в глобальной торговле и экономических связях. От небольших прибрежных судов до гигантских контейнеровозов – каждое из них выполняет свою уникальную роль в перемещении грузов по водным просторам. Однако, какой бы сложной ни была логистика и какой бы вместительной ни была грузовая палуба, эффективные подъемно-транспортные механизмы обеспечивают работу современного судна.
Эти сложные инженерные системы – от привычных грузоподъемных механизмов и стреловых грузовых устройств до мощных грузовых кранов – являются становым хребтом судовых операций. Они обеспечивают быструю и безопасную погрузку, выгрузку и перемещение грузов, напрямую влияя на скорость оборота судов, а следовательно, и на экономическую эффективность всей морской индустрии. Более того, надежность и правильная эксплуатация этих механизмов жизненно важны для обеспечения безопасности экипажа и сохранности перевозимых товаров.
В данном материале мы подробно рассмотрим устройство и принципы работы основных подъемно-транспортных систем, применяемых на судах морского флота. Мы углубимся в общие сведения о грузоподъемных механизмах, разберем механизмы стреловых грузовых устройств и грузовые краны, а также коснемся основ расчета грузоподъемных механизмов. Отдельное внимание будет уделено шлюпочным лебедкам, играющим критическую роль в обеспечении безопасности на море, и средствам внутрисудовой механизации, оптимизирующим внутренние грузовые операции. Понимание этих аспектов является неотъемлемой частью компетенций любого специалиста, связанного с морским флотом.
Общие сведения о грузоподъемных механизмах
К числу подъемно-транспортных механизмов относятся:
- механизмы стреловых грузовых устройств;
- грузовые краны;
- шлюпочные лебедки;
- средства внутрисудовой механизации;
- и другие механизмы, предназначенные для подъема, опускания и перемещения различных грузов на судах.
Правила Регистра РФ по Грузоподъемные механизмы современных морских судовгрузоподъемным устройствам морских судов устанавливают следующие требования к механизмам грузовых устройств. Конструкция механизмов с разобщенным приводом, а также переключающих механизмов, служащих для изменения скоростей, должна предотвращать падение груза или самопроизвольное движение стрелы или крана при разобщении передачи от привода к механизму или при переключении скоростей. У механизмов с гидроприводом следует предусматривать устройства, исключающие падение груза или самопроизвольное движение стрелы или крана при падении давления в гидросистеме.
Судовые механизмы подъема груза и изменения вылета стрелы должны быть выполнены так, чтобы опускание груза или стрелы производилось только с помощью привода. Каждый механизм должен быть снабжен тормозом, обеспечивающим торможение со следующим коэффициентом запаса торможения:
- не менее 1,5 – у механизма подъема груза;
- не менее 2 – у механизма изменения вылета стрелы;
- не менее 1 – у механизмов поворота и передвижения.
Принцип работы судовых грузоподъемных механизмов основан на использовании механической энергии для подъема, перемещения и опускания грузов на судне, а также для осуществления погрузочно-разгрузочных работ на судах. Эти механизмы, будь то грузовые краны, стреловые устройства или шлюпочные лебедки, преобразуют вращательное движение двигателей (электрических или гидравлических) в линейное движение тросов или цепей, обеспечивая точное и безопасное управление грузом. Принцип работы судовых грузоподъемных механизмов направлен на оптимизацию логистических процессов, минимизацию ручного труда и обеспечение высокой скорости оборота судов при соблюдении строгих норм безопасности.
Механизмы стреловых грузовых устройств
В данном пункте рассмотрим устройство и принцип действия судовых грузовых стрел.
Что такое судовые грузовые стрелы?
Судовые грузовые стрелы – это грузоподъемное устройство, осуществляющее удержание и перемещение груза при помощи системы тросов и блоков, закрепляемых вне стрелы (на мачтах, колоннах, палубах и лебедках).
Грузовые стрелы с вооружением – наиболее распространенный вид судовых грузоподъемных устройств. Вооружение стрел:
- тали,
- блоки,
- шкентели,
- топенанты,
- оттяжки,
служит для:
- подъема и опускания грузов;
- изменения положения стрел относительно ДП судна;
- изменения вылета стрел (угла наклона их к горизонту).
Снасти, с помощью которых выполняются эти операции, относятся к бегучему такелажу. Стрелы устанавливают на:
- мачтах;
- грузовых колоннах;
- надстройках и т. д.
Различают легкие и тяжелые стрелы.
Легкие стрелы – судовые грузовые стрелы с грузоподъемностью одиночной стрелы менее 100 кН (10 тс).
Тяжелые стрелы – судовые грузовые стрелы с грузоподъемностью одиночной стрелы более 100 кН (10 тс).
На рис. 1 изображена схема вооружения стрелы, установленной на мачте и оснащенной шкентельталями.
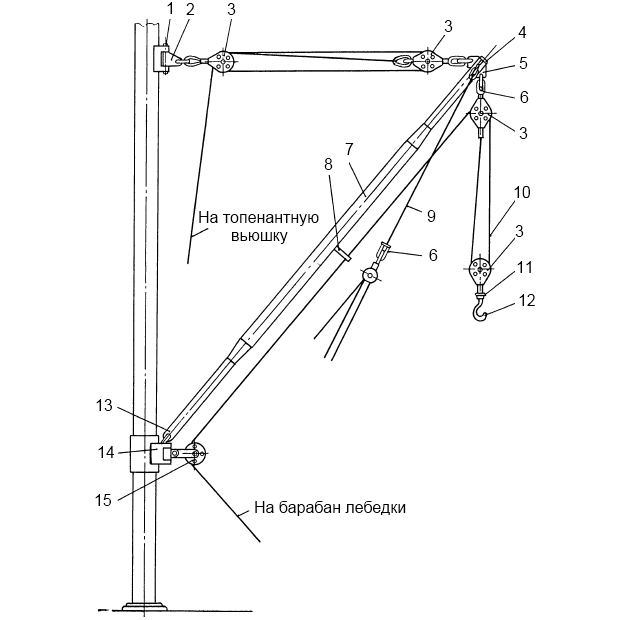
1 – башмак обуха для топенанта; 2 – обух для топенанта; 3 – блок талей; 4 – ноковый обух оттяжек; 5 – ноковый грузовой обух; 6 – такелажная скоба; 7 – стрела; 8 – хомут, поддерживающий шкентель; 9 – оттяжка; 10 – тали; 11 – скоба шкентеля; 12 – гак; 13 – вилка шпора; 14 – башмак шпора стрелы; 15 – направляющий блок
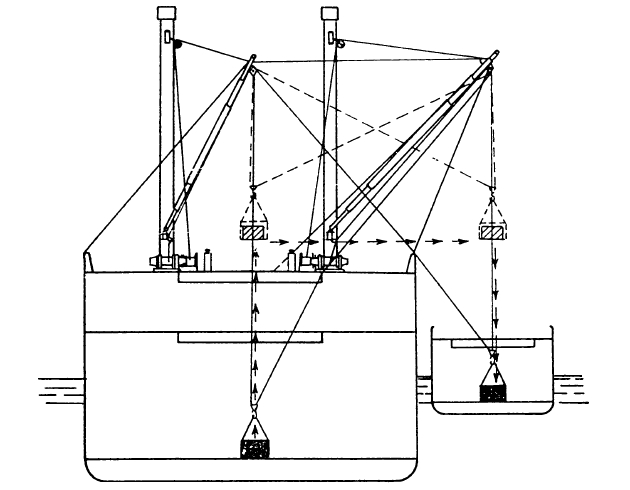
Более сложным является устройство, состоящее из двух закрепленных стрел, обслуживаемых каждая своей лебедкой, причем шкентели обеих лебедок соединены. При погрузке или Выгрузка груза с судна-газовоза рефрижераторного типавыгрузке грузы перемещаются в результате совместной работы двух лебедок с различными скоростями. При таком способе («телефонном») отсутствует раскачка груза. Кроме того, этим способом можно производить работы в рейдовых условиях и в открытом море (рис. 2).
Тяжеловесное стреловое устройство с парными поворотными стрелами, закрепленными на грузовой колонне, показано на рис. 3, который иллюстрирует погрузку большегрузного контейнера на судно.
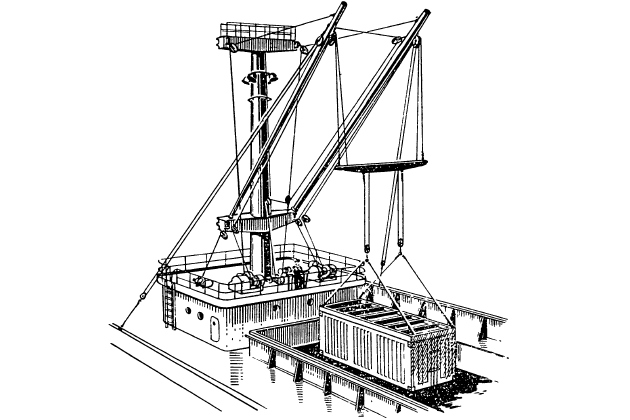
В этом грузовом устройстве применено шесть лебедок, из которых:
- две топенантные;
- две – для поворота стрел;
- и две грузовые – шкентельные.
Во всех рассмотренных грузовых устройствах в комплексе со стрелами работают Эксплуатация траловых и грузовых лебедок, уход за нимигрузовые лебедки, выполняющие функции шкентельных, топенантных и лебедок оттяжек. По типу привода различают лебедки:
- электрические,
- и гидравлические.
Грузовые лебедки с паровым приводом сейчас не применяются.
Передача вращающего момента от двигателя к грузовому валу в большинстве случаев осуществляется с помощью цилиндрических или планетарных зубчатых передач. Основные показатели грузовых лебедок следующие:
- номинальное тяговое усилие;
- скорость выбирания – травления шкентеля;
- масса;
- габариты.
Из современных российских грузовых лебедок наиболее распространенной является лебедка с планетарным редуктором (рис. 4).

1 – электродвигатель; 2 – колодочный тормоз; 3 – зубчатая муфта; 4 – ведущий вал; 5 – ось; 6 – сателлит; 7 – зубчатые венцы сателлитов; 8 – вал-шестерня; 9 – барабан грузовой; 10, 25 – подшипники; 11 – турачка; 12 – крышка; 13, 24 – стойки; 14 – стопор; 15 – гайка; 16 – стопорный штифт; 17 – ленточный тормоз; 18 – реборда; 19, 20 – плавающие зубчатые венцы; 21 – коронка; 22 – солнечная шестерня; 23 – водило
Эти судовые лебедки унифицированы и представляют собой типизированный ряд. Основные характеристики некоторых лебедок этого ряда приведены в табл. 1.
| Таблица 1. Основные характеристики российских грузовых лебедок | ||||||
|---|---|---|---|---|---|---|
| Индекс | Номинальное тяговое усилие, кH (тс) | Скорость, м/мин | Масса лебедки, т | Примечание | ||
| подъема груза | спуска груза | холостого гака | ||||
| ЛЭ68 | 5,5 (0,56) | 18 | 20 | 19 | 0,255 | |
| ЛЭ69 | 17,6 (1,8) | 26 | 28 | 27 | 0,79 | |
| ЛЭ71 | 35,2 (3,6) | 50 | 50 | 50 | 2,53 | |
| ЛЭ72 | 52/35,2 (5,3/3,6) | 28 | 50 | 28/50 | 3,23 | |
| ЛЭ75 | 35,2 (3,6) | 65 | 65 | 65 | 2,56 | |
| ЛЭ77 | – | 7,26 | С приставным тяжеловесным барабаном | |||
| КЭТ1 | 40/20 | 40/20 | – | 3,95 | Комплекс топенантных лебедок, состоящих из двух одинаковых лебедок | |
Грузовые краны
Что такое грузовой кран?
Грузовой кран – это грузоподъемное устройство, согласно определению Регистра РФ, не нуждающееся для каких-либо перемещений груза в системе тросов и блоков, закрепляемых вне собственной конструкции.
Применение грузовых кранов на судах обусловлено их более высокой по сравнению с грузовыми стрелами маневренностью, меньшими затратами труда на подготовку к работе и, как следствие этого, более высокой производительностью. Если для работы механизированных стрел требуется четыре механизма или более, то весь цикл рабочих движений грузового крана обеспечивается тремя механизмами, осуществляющими подъем, поворот и изменение вылета стрелы.
По конструкции различают Судовые подъемные краны: теория расчета и практические аспекты эксплуатациисудовые краны:
- стреловые (наиболее распространенные);
- козловые;
- и мостовые.
По способу крепления краны делятся на:
- стационарные,
- и передвижные.
По типу привода морские грузовые краны делятся на:
- электрические,
- и электрогидравлические.
Приводы основных механизмов стрелового крана:
- подъема;
- изменения вылета;
- поворота стрелы,
в основном идентичны механизмам стреловых устройств. По существу, механизмы подъема и изменения вылета стрелы представляют собой грузовые лебедки, описанные выше.
На крупнотоннажных судах – контейнеровозах применяют передвижные мостовые и козловые краны. На некоторых судах – лихтеровозах для подъема с воды и перемещения по судну плавучих контейнеров – лихтеров используют самоходные козловые краны, грузоподъемность которых достигает 5 000 кН (500 тс). Для работы в условиях морского волнения краны оборудуют специальными следящими устройствами.
Появление контейнерных судов привело к созданию грузовых средств, позволяющих осуществлять перегрузку контейнеров и выполнять операции с генеральными грузами. Одним из таких средств являются сдвоенные краны. Сдвоенный кран представляет собой обычно два скомпонованных на одной поворотной платформе одинаковых крана, которые могут работать порознь и вместе. В последнем случае их стрелы фиксируются параллельно одна другой и оба крана поворачиваются вместе с платформой. Общий вид такого крана представлен на рис. 5.

На строящихся российских сухогрузных судах устанавливают электрогидравлические и электрические судовые краны, основные характеристики которых приведены в табл. 2.
| Таблица 2. Основные характеристики российских судовых грузовых кранов | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Индекс | Грузоподъемность, кH (тс) | Высота подъема груза, м | Вылет стрелы, м | Скорость | Масса крана, т | Примечание | ||||
| наибольший | наименьший | подъема груза, м/мин | подъема холостого гака, м/мин | изменения вылета, м/мин | поворота, об/мин | |||||
| КЭ32-2 | 32 (3,2) | 20 | 14 | 4 | 65 | 68 | 24 | 1,6 | 9,63 | Электрические |
| КЭ31 | 50 (5) | 22 | 15 | 4 | 30/55 | 30/55 | 25 | 1,25 | 13,0 | |
| КЭ26М | 50 (5) | 22 | 14 | 4 | 26/58 | -/55 | 20 | 1,3 | 13,5 | |
| КЭ35 | 80 (8) | 22 | 18 | 4 | 20/68 | -/68 | 16 | 1,0 | 15,8 | |
| КЭГ8014 | 80 (8) | 22 | 14 | 4,5 | 0-56 | 18 | 1,2 | 18,0 | Электрогидравлические | |
| КЭГ8018 | 80 (8) | 22 | 18 | 5 | 0-56 | 22,4 | 1,2 | 18,4 | ||
| КЭГ 12/18 | 120 (12) | 25 | 18 | 2,9 | 0-72 | 28,3 | 1,3 | 28,4 | ||
| 2КЭГ 12/18 | 240 (24) | 25 | 18 | 2,9 | 0-50 | 28,3 | 0,6 | 77,5 | ||
Устройство электрогидравлического крана КЭГ8018 показано на рис. 6.
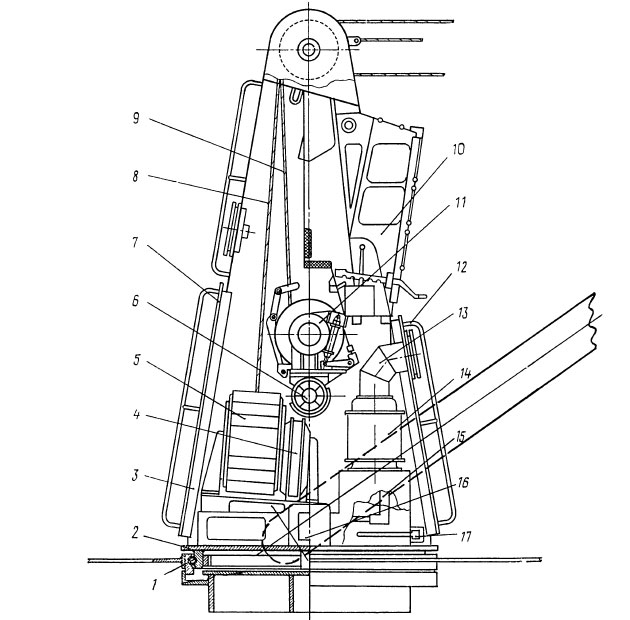
Корпус крана 3 опирается на плиту 2 и относительно фундамента вращается в опорном подшипнике 1. Грузовая лебедка 5 для шкентеля 8 приводится во вращение гидромотором 4. Аналогичное устройство имеет топенантная лебедка 11 для топенанта 9. Все гидромоторы, в том числе и механизма поворота (на рисунке не показан), получают питание от насосной станции 15 с электродвигателем 14. Для доступа к механизмам крана с целью монтажа и обслуживания служит дверь 7. Крановщик располагается в кабине 10. Электропитание к крану подводится от судовой сети через токосъемник 16.
Охлаждение механизмов производится через вентиляционное окно 12 и кожух 13. Масло гидросистемы охлаждается в маслоохладителе 6 и в зимнее время подогревается в маслоподогревателе 17.
Основы расчета грузоподъемных механизмов
В данном пункте приведена методика расчета грузоподъемности судовых лебедок. Исходными величинами для расчета Подъемные механизмы плавучей буровой установки и системы их управленияподъемного механизма служат:
- грузоподъемность P, кН, т. е. усилие на гаке;
- скорость подъема груза на гаке v, м/мин.
Рабочее тяговое усилие в грузовом шкентеле у грузового барабана лебедки:
где:
- G – масса грузового гака и его скобы, в первом приближении можно принимать:
- ηбл – КПД одного блока, ηбл = 0,92-0,98;
- n – число блоков между барабаном и гаком.
Скорость подъема расчетного груза:
- при силовых режимах v1 = 15-30 м/мин;
- при скоростных режимах v2 = 30-60 м/мин.
Необходимую мощность электродвигателя лебедки Nэ, кВт, можно определить по формуле:
где:
- ηл – общий КПД лебедки, который находят как произведение КПД зубчатых передач ηз, редуктора ηр, барабана ηб, подшипников валов ηп, тормоза ηт; в выбранной кинематической схеме механизма:
обычно ηл = 0,35-0,75;
где:
- m, k – соответственно число зубчатых передач и пар подшипников.
Далее по каталогам подбирают подходящий электродвигатель соответствующей мощности с необходимой частотой вращения nэ.
Передаточное число механизма лебедки:
где:
- nб – частота вращения грузового барабана, об/мин, которая определяется из соотношения:
Здесь:
- Dср – расчетный диаметр барабана:
Диаметр грузового барабана:
где:
- dт – диаметр грузового каната (шкентеля), который находят из таблиц по значению разрывного усилия Rразр = kTmax;
- k – коэффициент запаса прочности; для стальных тросов k = 4-5,5, для растительных k = 7-8;
- z – число слоев, укладываемых по длине барабана, зависящее от его размеров и длины троса Lтр; обычно Lтр = 40-75 м, z = 5.
Крутящий момент Mб, кН·м, на валу грузового барабана:
где:
- ηб – КПД барабана.
Шлюпочные лебедки
Шлюпочные лебедки входят в состав шлюпочного устройства, основное назначение которого – обеспечение быстрого и безопасного спуска и подъема Судовые спасательные средства, выживание в море, оказание первой помощи и сигналы бедствияспасательных шлюпок (в соответствии с требованиями Международной конвенции по охране человеческой жизни на море), а также рабочих шлюпок.
Устройство и принцип действия шлюпочных спуско-подъемных устройств включает в себя применение на морских судах для обслуживания спасательных и рабочих шлюпок, а также рабочих и разъездных катеров гравитационных шлюпбалок с нижней и верхней проводкой лопарей, а именно:
- ростровые скатывающиеся шлюпбалки;
- одношарнирные;
- и двухшарнирные.
Что такое лопарь?
Лопарь – это гибкая связь между шлюпкой и шлюпочной лебедкой. В качестве лопарей в основном используют стальные канаты, реже – растительные или синтетические.
Шлюпочные лебедки для морских судов нормализованы. С целью сокращения количества моделей число выпускаемых промышленностью типоразмеров шлюпочных лебедок ограничено. Основные характеристики шлюпочных лебедок типа ЛШ приведены в табл. 3.
| Таблица 3. Основные характеристики нормализованных шлюпочных лебедок типа ЛШ | |||||||
|---|---|---|---|---|---|---|---|
| Индекс | Тяговое усилие, кH (тс) | Скорость выбирания канатов, м/мин | Скорость травления канатов, м/мин | Диаметр каната, мм | Канатоемкость, м | Мощность электродвигателя, кВт | Масса лебедки, кг |
| ЛШ1 | 15,6 (1,6) | 11 | 60 | 11 | 2×40 | 2,2 | 330 |
| ЛШ3Д | 39,2 (4,0) | 20 | 60 | 15 | 7,0 | ||
| ЛШ4Д | 61,7 (6,3) | 20 | 50 | 24 | 14,0 | ||
| ЛШ5 | 98,1 (10,0) | 12 | 60 | 29 | 14,0 | ||
Шлюпочная электроручная лебедка (рис. 7) левого или правого исполнения состоит из следующих основных частей:
- корпуса с цилиндрическим редуктором;
- барабана для навивки лопарей;
- тормозной коробки;
- ручного привода;
- электрооборудования.
Она может быть снабжена выносным постом управления, устанавливаемым у Швартовка одного судна к борту другогоборта судна, или дистанционным постом управления, расположенным в шлюпке.

Трехступенчатый редуктор предназначен для передачи вращения от электродвигателя к барабану, от барабана к тормозному валу, а также к барабану от рычага ручного привода. На валу электродвигателя и валу редуктора смонтирована центробежная двухколодочная муфта, обеспечивающая надежное разобщение электродвигателя от вала редуктора при спуске шлюпки.
Барабан лебедки разделен посредине ребордой для навивки двух лопарей в четыре слоя.
На консольном конце тормозного вала смонтирована тормозная коробка, состоящая из:
- роликовой муфты свободного хода, с ручным ленточным тормозом;
- центробежного скоростного тормоза.
Внешняя обойма муфты свободного хода служит шкивом ленточного тормоза, который состоит из:
- стальной ленты с тормозной накладкой;
- рычага с грузом.
Внутренняя полумуфта неподвижно закреплена на валу. При травлении лопарей внешняя обойма (шкив ленточного тормоза) заклинивается и вращается вместе с внутренней полумуфтой. При выбирании лопарей внешняя обойма не вращается. К ступице внешней обоймы присоединены с помощью осей две колодки с тормозными накладками и пружины, регулирующие нажатие колодок при скоростном торможении. Весь узел заключен в стальной корпус, прикрепленный болтами к корпусу редуктора. Спуск шлюпки производится растормаживанием ленточного тормоза непосредственно рычагом тормозной коробки, либо рычагом дистанционного поста управления.
Предлагается к прочтению: Технические характеристики судовых палубных механизмов
Ручной привод позволяет поднимать шлюпку с полным снабжением без людей, а также вращать барабан лебедки на спуск для вытравливания ненагруженных лопарей. При установке рукоятки ручного привода для работы на подъем блокировочное устройство утапливает кнопку конечного выключателя, размыкающего цепь управления электродвигателем, и блокирует рукоятку ленточного тормоза, исключая возможность спуска шлюпки. При установке рукоятки ручного привода для работы на спуск блокировочным устройством утапливается кнопка конечного выключателя, но не блокируется рукоятка ленточного тормоза, который необходимо растормозить.
Расчет основных характеристик шлюпочных лебедок
Исходными данными служат следующие параметры:
- рабочая нагрузка P (на пару шлюпбалок) в канатах на барабане лебедки при вываливании, спуске и кратковременном подъеме шлюпки с полным снабжением и расчетным количеством людей P = Рном, кН;
- скорость травления канатов с барабана vт, м/мин, ограниченная скоростным тормозом;
- скорость спуска шлюпки vсп, м/мин;
- средняя скорость выбирания канатов электродвигателем vср, м/мин;
- средняя скорость подъема шлюпки vп, м/мин;
- диаметр каната (лопаря) d, м;
- полная рабочая длина каната, наматываемого на барабан lр, м.
Определение основных расчетных величин. Канатоемкость барабана определяют исходя из конструктивно заданных величин:
- диаметра;
- длины барабана;
- диаметра его реборд.
Барабан лебедки по длине разделен ребордой на две равные части. Диаметр барабана лебедки принимают:
Длину Lб каждой части барабана принимают в первом приближении в пределах:
Диаметр реборд:
где:
- Dб4 – диаметр навивки каната (лопаря) на четвертом слое.
Скорость выбирания канатов определяют при работе двигателя и ручного привода.
Средняя скорость выбирания лопарей vср, м/мин, при подъеме шлюпки электродвигателем:
скорость подъема шлюпки:
где:
- kт – кратность шлюпочных талей, kт = 2-4.
Средняя скорость выбирания канатов ручным приводом:
где:
- iр – общее передаточное число при работе ручным приводом;
- nр – частота вращения рычага привода.
Наибольшая требуемая мощность N, кВт, на валу электродвигателя:
где:
- vр – расчетная скорость для определения мощности, принимаемая по верхнему слою навивки, м/мин,
где:
- Dбп – диаметр барабана по верхнему слою навивки, м.
Время подъема шлюпки tп, мин, при работе двигателя:
где:
- nш – частота вращения барабана, необходимая для выбирания лопарей длиной Lр;
- nб = nдв/iобщ – частота вращения барабана лебедки, обеспечиваемая двигателем, об/мин.
Время спуска шлюпки:
Средства внутрисудовой механизации
К средствам внутрисудовой механизации относятся:
- различные грузоподъемные механизмы судов машинно-котельных отделений (МКО);
- грузовые и пассажирские лифты;
- подъемники и транспортеры производственно-технологических помещений морских промысловых судов и т. п.
Все перечисленные механизмы предназначены:
- для механизации трудоемких работ при ремонте главных и вспомогательных двигателей и котельных установок;
- для внутрисудовой транспортировки людей и грузов;
- для механизации технологических процессов в рыборазделочных цехах и судовых складах.
Простейшим грузоподъемным механизмом МКО являются тали, которые могут быть с ручным и электрическим приводом. В зависимости от типа передачи различают тали:
- ручные,
- червячные,
- шестеренные.
Тали подвешивают к легким четырехколесным тележкам, перемещаемым по монорельсам (в виде двутавровых балок), устанавливаемым над силовыми агрегатами в МКО. Тележки могут иметь ручной механизм передвижения и перемещаться вдоль монорельса. Такие тали, а также тали, выполненные за одно целое с тележками, иногда называют кошками.
Для механизации судовых работ применяют нормализованные ручные лебедки типа ЛР, основные характеристики которых приведены в табл. 4.
| Таблица 4. Основные характеристики нормализованных ручных лебедок типа ЛР | ||||
|---|---|---|---|---|
| Характеристика | ЛР160 | ЛР320 | ЛР500 | ЛР800 |
| Грузоподъемность, кH (тс) | 1,57 (0,16) | 3,14 (0,32) | 4,9 (0,5) | 7,85 (0,8) |
| Скорость подъема груза, м/с | 0,06 | 0,03 | 0,018 | 0,023 |
| Усилие на рукоятке, кH (тс) | 0,118 (0,012) | 0,118 (0,012) | 0,118 (0,012) | 0,236 (0,024) |
| Диаметр каната, мм | 4,8 | 6,1 | 7,4 | 8,7 |
| Число слоев навивки | 6 | 4 | 4 | 4 |
| Количество работающих на рукоятке, чел. | 1 | 1 | 1 | 2 |
| Масса лебедки, кг | 23 | 47 | 53 | 92 |
Ручная лебедка (рис. 8) представляет собой барабан 4, закрепленный в стойках закрытого корпуса 3, в котором имеются окна для выхода грузового каната.
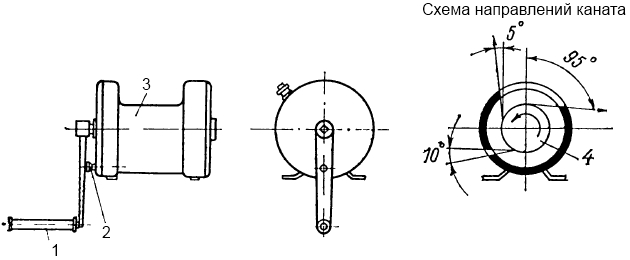
Барабан приводится во вращение посредством безопасной рукоятки 1 через планетарный редуктор, смонтированный частично в стойке корпуса, частично в барабане лебедки. Смазка трущихся деталей осуществляется колпачковой масленкой 2.
Безопасные рукоятки предотвращают произвольное вращение (разгон) рукоятки ручных механизмов при спуске груза. У ручных лебедок рукоятка соединена непосредственно с грузоупорным тормозом, а у ручных талей с таким тормозом соединена звездочка тяговой цепи.
Грузоупорный тормоз представляет собой автоматический тормоз осевого действия, замыкаемый массой поднимаемого груза и снабженный храповым остановом. При Устройства для погрузки, разгрузки и перемещения груза, и другие судовые такелажные работыподъеме груза замкнутый тормоз благодаря храповому останову автоматически выключается, а при остановке рукоятки или цепной звездочки – автоматически включается и удерживает груз на весу. Спуск груза производится вращением рукоятки или цепной звездочки, которые либо проворачивают затянутый тормоз, либо производят непрерывное частичное размыкание трущихся поверхностей, достаточное для плавного спуска груза. Это достигается в винтовом грузоупорном тормозе, конструкция которого приведена на рис. 9.
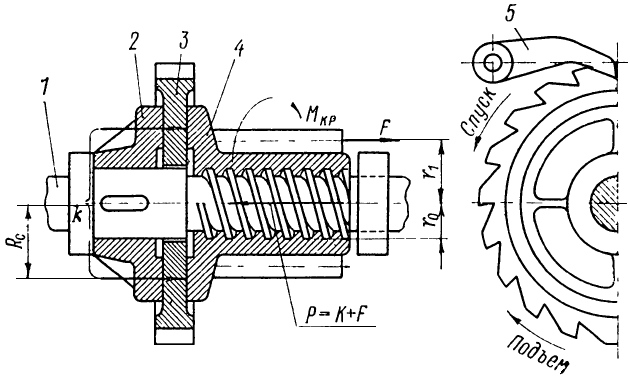
Рукоятка или цепная звездочка вращает вал 1, на котором закреплен диск 2 и посажен на резьбе диск 4, являющийся шестерней передачи к барабану. При вращении вала 1 на подъем диск 4 перемещается влево и сжимает храповик 3, который начинает вращаться, так как этому не препятствует собачка 5. При остановке вала 1 собачка 5 останавливает храповое колесо, и груз остается на весу. При вращении вала 1 в сторону спуска диск 4 передвигается вправо, размыкая тормоз; при этом груз начинает ускоренно опускаться и шестерня-диск 4, обгоняя вал, перемещается опять влево, сжимая неподвижный храповик. Подобные повторяющиеся смещения диска 4 переходят в плавное непрерывное скольжение дисков 2 и 4 по неподвижному храповику 3, и груз опускается со скоростью, отвечающей частоте вращения вала 1; при этом средняя угловая скорость шестерни 4 равна угловой скорости вала 1.
Читайте также: Грузовые лебедки БМРТ
Для удержания груза необходимо, чтобы тормозной момент между дисками 2, 4 и храповиком 3 был больше крутящего момента Mгр, развиваемого грузом на валу 1.
Условие самоторможения:
где:
- M1 и M2 – моменты трения между дисками 2, 4 и неподвижным храповиком 3;
- μ – коэффициент трения между дисками 2, 4 и храповиком 3;
- K – осевое давление на храповик 3;
- ψ – коэффициент запаса.
Под действием момента Mгр диск 4 стремится двигаться влево, преодолевая силу трения в зубьях:
где:
- μ1 – коэффициент трения в зубьях; при этом осевое усилие P = K + F частично погашается силой F и создает давление на диске 3.
Силу K можно определить из условия равновесия диска 4 при неподвижном вале 1:
где:
- Mр – момент трения в резьбе при угле подъема ее α и угле трения ρ с учетом влияния силы трения в зубьях.
Подставляя значение Mгр из формулы 14 в формулу 16 и заменяя F его значением из формулы 15, получаем условие самоторможения в следующей форме:
Чрезвычайно важно обеспечить плавный спуск груза, без толчков. Для этого рекомендуется принимать ψ = 1,1-1,2; α = 12-20° (многозаходная резьба) и сводить к минимуму угол трения ρ.
Зазоры между разомкнутыми трущимися поверхностями должны быть минимальными и регулируемыми по мере износа трущихся поверхностей, который следует стремиться свести к минимуму.
Недостатком грузоупорных тормозов является излишняя затрата энергии при спуске, повышенный износ тормоза и медленная остановка груза. Достоинства: компактность и облегчение возможности регулировки скорости спуска.
Для обслуживания МКО современных Основы маневренности крупнотоннажных судовкрупнотоннажных судов применяют мостовые краны. Управляемые дистанционно, они имеют электрические приводы на механизмах подъема, перемещения моста (вдоль ДП судна) и грузовой тележки (поперек судна). Благодаря такой конструкции мостовые краны полностью механизируют все ремонтно-монтажные работы в МКО. Существующие краны типа КЭМ представляют собой типизированный ряд механизмов, основные характеристики которых приведены в табл. 5.
| Таблица 5. Основные характеристики кранов типа КЭМ | ||||||||
|---|---|---|---|---|---|---|---|---|
| Индекс | Грузоподъемность, кH (тс) | Наибольшая высота подъема груза, м | Скорость, м/с | Суммарная мощность, потребляемая электродвигателями крана, кВт | Масса, кг | |||
| подъема (спуска) груза | передвижения крана | передвижения тележки | ||||||
| малая | большая | |||||||
| КЭМ11 | 31,4 (3,2) | 10 | 0,01 | 0,117 | 0,117 | 0,05 | 12 | 2 800 |
| КЭМ12 | 49 (5,0) | 13 | 0,01 | 0,117 | 0,117 | 0,05 | 16 | 3 650 |
| КЭМ6М | 98,1 (10) | 15 | 0,01 | 0,117 | 0,122 | 0,067 | 26 | 7 250 |
| Примечание. Масса кранов указана для величины пролета – расстояние между подкрановыми балками, равного 4 м | ||||||||
На рис. 10 представлен общий вид крана КЭМ6М.
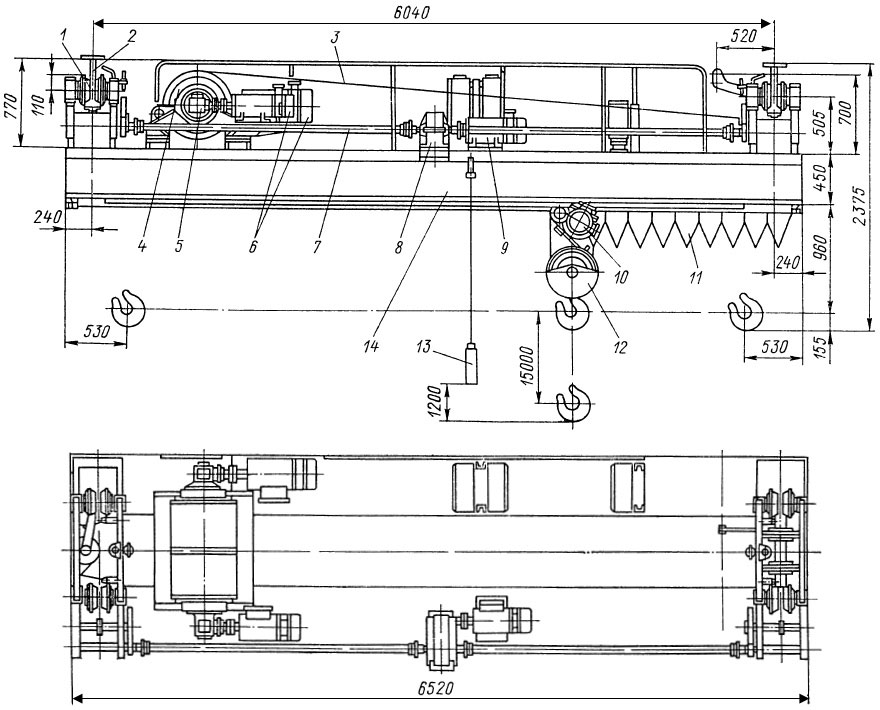
Мост крана 14 перемещается вдоль ДП судна на катках 1, опирающихся на полки подкрановых балок 2. Вращение каткам передается от электродвигателя 9 через редуктор 8 и валы 7. Механизм подъема включает в себя электродвигатели 6 с редукторами 5 и барабан лебедки 4. Грузовой канат 3 огибает блок подвижной обоймы грузовой подвески 12. Механизм перемещения грузовой тележки 10 получает питание через кабель 11. Управление всеми механизмами крана выведено на подвесной кнопочный пульт 13.
С ростом размерений судов, увеличением числа палуб, появлением специализированных Подготовка грузовых помещений и судовых устройств к приему груза, укладка и крепление грузовпомещений на судах получили широкое распространение лифты:
- грузовые,
- камбузные,
- пассажирские.
Наиболее распространенные кинематические схемы судовых лифтов представлены на рис. 11, а, б, в.

1 – направляющая; 2 – клеть; 3 – противовес; 4 – блоки; 5 – канатоведущий шкив
Общим для всех схем является наличие противовеса у кабины и канатоведущего барабана у лебедки.
Лифт представляет собой устройство прерывного действия, предназначенное для подъема и спуска людей и грузов в кабине, которая перемещается по жестким вертикальным направляющим, установленным в шахте.
Будет интересно: Электрические траловые лебёдки на промысловых судах
К средствам внутрисудовой механизации можно отнести также:
- различные конвейеры;
- ящичные и элеваторные подъемники;
- подъемные платформы судов с горизонтальным способом грузообработки (см. пункт «Люковые закрытия и специальные устройства судов с горизонтальным способом грузообработкиСпециальные устройства судов с горизонтальным способом грузообработки»).

- Аристов Ю. К. Судовые вспомогательные механизмы. М., Речной транспорт. М., 1963.
- Арцыков А. П., Воронов В. Ф. Судовые вспомогательные механизмы. Л., Судпромгиз, 1963.
- Башта Т. М. Машиностроительная гидравлика. М., ГНТИМЛ, 1963.
- Богомольный А. Е. Судовые вспомогательные и рыбопромысловые механизмы. Л., Судостроение, 1971.
- Валдаев М. М. Гидравлические приводы судовых палубных механизмов. Л., Судостроение, 1973.
- Власьев Б. А., Резчик Ю. И. Судовые вспомогательные механизмы. Л., Судостроение, 1979.
- Колесников О. Г. Судовые вспомогательные механизмы и холодильные установки. М., Транспорт, 1964.
- Лукин Г. Я., Колесник Н. Н. Опреснительные установки промыслового флота. М., Пищевая промышленность, 1970.
- Попов Р. И. Судовые вспомогательные механизмы. М., Пищевая промышленность, 1970.
- Торбан С. С. Судовые и береговые промысловые установки и механизмы. М., Пищевая промышленность, 1972.
- Шмаков М. Г. Судовые устройства. М., Транспорт, 1971.
- Шмаков М. Г., Климов А. С. Якорные и швартовные устройства. Л., Судостроение, 1964.
- Юткевич Р. М., Савин К. А., Волегов В. А. Судовые сепараторы топлива и масла. Л., Судостроение, 1967.





