Штормовое плавание – это не только испытание для капитанов, но и настоящая проверка навыков и умений. Когда надвигается буря, важно не поддаваться панике и действовать четко и обдуманно.
- Штормовые случаи
- Гидродинамические условия штормового плавания
- Классификация морских волн
- Построение модели волнового поля на основе реальных наблюдений в штормовом море
- Групповая структура трохоидальных штормовых волн и зыби в открытом море
- Навигационный комплекс контроля состояния моря, атмосферы и мореходности корабля
- Бортовые счетно-решающие комплексы и штурманские базы знаний
Практика безопасного мореплавания в шторм в современной судовой отрасли обусловлена новшествами, которые стали возможны с развитием проектирования и строения судов усиленной конструкции, а также усовершенствования радиолокационного и метеонавигационного оборудования.
Достижения науки, естествознания и техники концентрируются в морских технологиях и кораблестроительной практике, обусловливая эффективность мореходства и безопасность человеческой жизни на море. И все же существует некий водораздел между корабелами и мореплавателями, поднявшись на который можно познать сложности и единство морских наук.
Любые работы на море, как строительство флота, так и обустройство прибрежной инфраструктуры, требуют огромных капитальных вложений. Именно поэтому комплексное изучение мореходства во взаимосвязи кораблестроительных и навигационных наук, поиск путей сквозной непротиворечивой оптимизации всех вопросов, связанных с проектированием нового флота и его практической эксплуатацией, с обязательным учетом штормовых условий северных морей, представляется актуальной научной задачей экономического развития Дальнего Востока России.

Вопросы проектирования портовых сооружений, выбора и обустройства безопасных морских гаваней в основном решаются с использованием тех же научных подходов и математических методов, что и проектирование морских судов как плавучих инженерных сооружений. На всем побережье о-ва Сахалин нет ни одного надежного всепогодного порта-убежища. И если, к примеру, на нефтепромысловые акватории северо-восточного шельфа Сахалина требуется привести тяжелую берегоустроительную и Ремонт подводной части судовсудоподъемную технику, то судовладельцы рискуют потерять ее даже в случае поступления своевременных штормовых предупреждений – слишком далеки ближайшие крупные порты-укрытия в Японии и Приморском крае. И только должным образом обустроенное морское побережье дает возможность использования маломерного флота и громоздких маломореходных инженерных сооружений при освоении сахалинского шельфа.
Из этого следует, что любые российские или иностранные плавсредства, предназначенные для работы в Сахалинской области, должны обладать достаточной мореходностью и способностью к длительному автономному плаванию в условиях дальневосточных ураганных штормов. Такие условия освоения морских ресурсов удорожают экономику мореходства, а флот повышенной мореходности обходится значительно дороже как при строительстве, так и при последующей его эксплуатации. Морские суда повышенной штормовой мореходности должны иметь большую осадку, и для них требуются глубоководные порты, как Корсаков, Холмск и др. Ничем не оправданный вывод из эксплуатации малых портов-ковшей и обустроенных в навигационном отношении устьев рек лишает сахалинцев прибрежного флота и каботажных морских коммуникаций (издержки сплошной автомобилизации).
Сбалансированное восстановление морской экономики Сахалинской области и Курильских островов должно быть связано с комплексным обустройством морских акваторий, соответствующих условиям мореплавания в дальневосточных морях России:
- внедрение в морские службы телеметрических потоков о состоянии моря и атмосферы, обеспечивающих получение достоверной информации о текущей обстановке на море, и выработку прогнозов о динамике изменения состояния моря и атмосферы для всех судов, находящихся в море;
- создание судовой измерительной и счетно-решающей аппаратуры, оценивающей состояние моря, атмосферы и их взаимодействие с движущимся кораблем, способной выполнять роль бортовой экспертно-аналитической системы, рекомендующей судоводителю различные варианты решения поставленных перед судном задач;
- поиск непротиворечивых методов проектирования новых кораблей и судов, наилучшим образом адаптированных к безопасному плаванию и эффективному выполнению поставленных задач в сложных, ледовых и штормовым условиях.
При эффективной работе систем мониторинга морских акваторий и бортовых экспертно-управляющих комплексов судовождения может стать допустимой эксплуатация небольших маломореходных судов в штормовом море, или, по крайней мере, это придаст морякам большей уверенности в том, что штормовая непогода и аварийные неурядицы на море не обратятся морскими катастрофами.
Штормовые случаи
Штормовые случаи на море предоставляют прекрасную возможность для разбора всех морских условий и действий экипажа, и вынесения из них важных выводов, которые помогут обеспечить безопасность на море на судов и людей.
11 января 1996 года в 06 часов утра по сахалинскому времени при переходе из порта Корсаков в порт Холмск в условиях жесткого шторма опрокинулся и затонул на траверзе мыса Лопатина, в дистанции 1,5 мили (координаты 46º36’ c. ш. 146°46,6’ в. д.), производственно-транспортный рефрижератор (ПТР) «Сисафико-0214». В результате кораблекрушения из находившихся на борту судна 9 членов экипажа 5 чел. погибли.
Гидрометеорологические условия: ветер северного направления 20 м/с и порывами до 35 м/с, высота волны 3-4,5 м, снежные заряды и ограниченная видимость, температура воздуха 5-7° мороза, темное время суток.
Так представляется заключительное сообщение о штормовом кораблекрушении в сборнике материалов Управления мореплавания Комитета по рыболовству России.

Утром 8 января ПТР «Сисафико-02» после получения благоприятного прогноза погоды вышел из порта Корсаков в порт Холмск. При подходе к мысу Крильон (о-в Сахалин) погода резко ухудшилась, и в ожидании ее улучшения капитан принял решение отстояться на якоре в бухте Морж, берега которой прикроют судно от ветров северных и западных направлений. 10 января капитан судна доложил о возможности дальнейшего следования, однако получил указание оставаться на месте до утра 11 января, так как, согласно прогнозам, наблюдаемое улучшение погоды – только временное явление. К концу суток 10 января ветер изменил направление на восточное и усилился до 15 м/с, в связи с чем капитан принял решение следовать в район мыса Кузнецова для укрытия от ветров восточных направлений. В 22 часа судно снялось с якоря и последовало в указанный район. Прибыв к назначенному ранее месту якорной стоянки, капитан изменил свое первоначальное намерение и решил следовать по назначению в порт Холмск. Новое решение капитана основывалось на том, что на всем пути следования наблюдался восточный ветер 8-10 м/с, волнение моря до 1 м, и такие условия позволяли беспрепятственно продолжать плавание.

Следует отметить, что общая оценка состояния погоды и возможности продолжения рейса подтвердились справкой Сахалинского УГМС и расчетом средней скорости судна на переходе от бухты Морж до мыса Лопатина. В 02 часа 11 января, пройдя в полутора милях траверз мыса Кузнецова, капитан сдал ходовую вахту старшему помощнику с указанием следовать по назначению. Около 5 часов утра сложились крайне неблагоприятные погодные условия: сильный северный ветер до 23 м/с, крупная зыбь до 4 м и обильный снегопад. Примерно в 05 часов 40 мин был вызван на мостик капитан.
Читайте также: Средства навигационного оборудования
Так как судно следовало курсом 10 градусов (практически против ветра и волны), капитан, оценив обстановку, через 10 минут дал команду рулевому повернуть на 180 градусов и лечь на обратный курс, при этом уменьшил ход до малого. Понаблюдав за поведением судна на заданном курсе в течение 5-7 минут, он спустился к себе в каюту, чтобы одеть теплую одежду, но был вынужден тотчас вернуться на мостик, так как судно вдруг резко завалилось на правый борт и его крен достиг 50 градусов, а верхнюю палубу по правому борту заполнила большая масса воды, уровень которой доходил до верхней кромки носовой тамбучины. Судно застыло в этом состоянии, не выравнивалось и медленно разворачивалось влево лагом (бортом) к волне при положении руля право на борт и работе машины малым ходом вперед.
Спустя считанные секунды при очередном накате волны судно полностью легло на правый борт и больше не выправилось.
Через несколько минут на надстройке в районе спасательных плотов собрался весь экипаж судна. Темное время суток зимнего навигационного сезона существенно затрудняло работу со спасательными средствами. Пять членов экипажа, оказавшихся на частично поврежденном плоту, внутрь которого проникали ледяные потоки штормовых волн, не смогли дождаться спасательного судна. Другой плот, находясь в свободном дрейфе около 15 часов, также испытывал мощные удары волн, одной из которых у него был разорван носовой вход, и, хотя повреждение удалось устранить, набравшуюся внутрь воду пришлось удалять всеми подручными средствами.
Оба спасательных плота, рассчитанные на 10 чел., не выдержали ударов штормовых волн при нагрузке в 4-5 чел., тем не менее, их штормовая устойчивость оказалось выше, чем у погибшего морского судна.
Безусловно, причиной гибели стал отказ от Подготовка к плаванию в штормовую погодуактивного штормования с ходом навстречу штормовой волне, при котором судно все дальше и дальше уходило бы из под прикрытия берега, встречая усиленное волнения открытого моря. Несправедливо также винить капитана за его слишком предусмотрительное снижение хода до малого, так как на полном ходу, при захвате корпуса попутной волной и при недостаточной опытности рулевого мог бы произойти очень быстрый поворот судна на курс лагом к волне с мгновенным опрокидыванием и гибелью всего экипажа. В свободном же плавании аварийное судно продержалось еще 20 минут, опрокинувшись вверх килем через 2-3 минуты после отхода последнего спасательного плота.
Об умеренных условиях штормового плавания свидетельствует также тот факт, что один из спасательных плотов смог безопасно дрейфовать в штормовом море до 21 час. 20 мин., пока его не обнаружили с берегового поста на расстоянии 3 – 3,5 миль от берега и не подняли из воды на СТР «Камский».
Главной причиной гибели судна может быть признана только его недостаточная штормовая мореходность, выразившаяся в проектных недостатках формы корпуса, неспособного безопасно держаться на штормовой волне даже при исправно работающих двигателях. Следует также признать, что гибель подобных судов будет предрешенной в случае остановки главных двигателей или рулевых машин. Другой причиной, видимо, явилось поперечное смещение грузов внутри корпуса, отчего судно не смогло выпрямиться после накренения на 50°.
Проблему возможного смещения грузов также необходимо отнести к чисто конструктивным недостаткам судна. Если корпус малого судна проектировался для плавания при хорошей всхожести на волну, то в его эксплуатационных режимах должны предусматриваться сильные накренения и интенсивная килевая качка, приводящая к превышению ускорения свободного падения в оконечностях корпуса, соответственно планирование внутренних отсеков должно обеспечивать недопустимость свободного перемещения грузов с одного борта на другой.
Что такое штормовая мореходность?
Штормовая мореходность – это совокупность качеств судна, определяющих его способность безопасно плавать и выполнять свои задачи в сложных метеорологических условиях, таких как шторм. Она характеризует устойчивость судна к воздействию сильного ветра, высоких волн и других неблагоприятных факторов.
28 декабря 1995 г. примерно в 09 час. 20 мин. (время московское) в Норвежском море в координатах 70°31’,9 с. ш., 19°38’,6 в. д. при следовании из района промысла в Данию для сдачи груза затонул СРТМ «Новгородец». В результате кораблекрушения погибли 10 из 25 членов экипажа траулера.
Гидрометеорологические условия на момент катастрофы: ветер северного направления 12-15 м/с, высота волны 3-4 м, снежные заряды, ограниченная видимость (100-200 м) и интенсивное обледенение.
Рыбопромысловый флотСредний рыболовный траулер морозильный, является довольно крупным судном, и в таких гидрометеорологических условиях он мог бы продолжать работу с орудиями лова на любых курсах относительно волнения. 24 декабря траулер «Новгородец» завершил работу в Баренцевом море и с полным грузом мороженой рыбной продукции снялся с промысла и вышел вдоль побережья в Норвежское море. Ветер и волнение на море способствовали интенсивному обледенению, однако капитан не особо тревожился о постоянном крене около 2-3° на правый наветренный борт.

Освещенность в зимнем плавании за полярным кругом не превышала уровня навигационных сумерек (при которых не гаснут звезды), тем не менее, экипажу не менее двух раз в «дневное» время суток приходилось скалывать лед. В 5 часов утра 26 декабря, старший помощник капитана, заступив на ходовую вахту, обеспокоился заметным усилением крена на правый наветренный борт и отправил старшего рыбмастера проверить состояние грузов в носовых морозильных трюмах. Северный ветер дул с кормовых румбов правого борта, отчего из ходовой рубки шторм казался не столь опасным, однако с палубы проверить состояние трюмов не представлялось возможным из-за сильной бортовой качки и постоянной заливаемости большой промысловой палубы СРТМ.
Заметим, что по условиям организации службы на российских рыбопромысловых судах, наиболее опытные рулевые традиционно несут вахту с третьим штурманом или со вторым – грузовым помощником капитана. Причем, в обязанности старшего рулевого, который в сложных условиях плавания должен бессменно находиться у штурвала, нередко вменяется еще и заведование артелкой (провизионным складом), отчего самая сложная в навигационном отношении утренняя старпомовская вахта, называемая иногда «собачьей», достается молодым и не самым опытным матросам.
Итак, старпом, заполошенный разборками с рыбмастером о правильности заполнения пространства носового трюма, не очень-то следит за действиями своего вахтенного матроса у штурвала. Не исключено также, что он использует его на посылках или палубных работах с проштрафившимся рыбмастером, доверяя штормовое управление судном авторулевому, так как и сам-то старпом тоже не может прерывать суету своих многочисленных утренних распорядительных забот.
ВОПРОС
Старпом – это сокращение от слова старший помощник капитана, и это должность на корабле или другом плавательном средстве.
Около 7 часов утра на верхнюю палубу «Новгородца» с правого борта заходит очередная крупная волна, судно сильно кренится на наветренный борт, сливая образовавшееся на промысловой палубе обширное «озеро» прямо через Ограждение открытых палуб фальшбортами, леерами и волноотбойниками и подвижные соединенияфальшборт, а в следующем такте штормовой качки у траулера обнаруживается постоянный крен на правый борт, достигающий 30°. Попытка вывести судно на штормовой курс носом на волну заканчивается поломкой рулевой машины. Сложились все признаки близкого кораблекрушения.
Штормовые поломки рулевого управления очень характерны для данного типа судов, если во время шторма на них задействуется Авторулевой Аист, общие характеристикиавторулевой типа «Аист». «Аист» умеет очень быстро вертеть балером, вихляя рулем чуть ли ни с борта на борт (причиной тому является явное несовершенство математической модели управления, заложенной в этот автомат). Внешней причиной являются особенности гирокомпáса, чувствительный элемент которого реагирует не только на рыскание судна на курсе, но в еще большей степени подвержен сильным инерционным воздействиям при его бортовой качке (гирокомпáс на СРТМ установлен не в центральной части корпуса, а по левому борту высоко над водой – в ходовой рубке, выше – только мачта).
Объявляется судовая тревога, и старпом дает распоряжения о восстановлении ручного рулевого управления, перекачке топлива и балласта, перегрузе рыбопродукции в трюме и траловых досок на палубе на левый борт. Все тщетно, и ровно через час развития аварийной ситуации, в 8 часов утра капитан дает команду об оставлении гибнущего судна.
Отметим здесь, что у этого типа траулера очень широкие морозильные трюма, которые никак не оборудованы для раскрепления навалочных грузов. То есть трюм по условиям штормового плавания должен заполняться полностью, под самый подволок. Не исключено, что рыбмастер пытался упорядоченно укладывать различные виды мороженой рыбопродукции, оставляя как недогруженными до подволока штабеля с картонными коробами рыб, так и проходы между ними для удобства контроля при планировавшейся сдаче рыбопродукции в иностранном порту. Такие нарушения в укладке картонных коробов обычно грозят их обрушением на трюмных матросов даже в относительно тихую погоду. На траулере типа СРТМ дела обстояли намного хуже, так как на умеренном и сильном волнении в носовом трюме нередко превышаются ускорения свободного падения, отчего никак не раскрепленные короба мороженой рыбы представляются наиопаснейшим вариантом сыпучего груза.
Предлагается к прочтению: Влияние силы ветра на управляемость судна
В районе кораблекрушения у норвежского острова Ванней спасением экипажа «Новгородца» занимались несколько российских судов, работал также норвежский вертолет. Также как и у транспортного рефрижератора «Сисафико-02», здесь возникают проблемы с посадкой экипажа в спасательные плотики, которые переворачиваются при спуске на воду и рвутся, когда люди садятся в них, соприкасаясь с судовыми устройствами и выступающей арматурой на палубе сильно накренившегося траулера. Второй помощник капитана руководит работой со спасательными плотами и погибает, оказавшись в ледяной воде у первого плотика, впоследствии разорванного и затонувшего.
Два других плотика с 15 членами экипажа отходят от аварийного судна, и пока за ними гоняются спасатели, оставшийся на борту экипаж погибает вместе с затонувшим в 09 час. 20 мин. траулером «Новгородец».
Конечно, надежное крепление разнородных партий мороженой рыбной продукции желательно предусматривать чисто конструктивными способами еще при проектировании и строительстве траулеров.
Это особенно актуально в настоящее время, когда рыбный промысел ведется не до полной загрузки трюмов, а лишь строго по квотам на различные виды рыб. А потому трудно винить экипаж в том, что он не предусмотрел и не выполнил множества предупредительных судовых работ, что ходовая вахта слишком доверилась надежности судовых машин и, безусловно высоким штормовым Предмет “Теория судна” и его роль в подготовке судоводителеймореходным качествам траулера типа СРТМ. Однако беда не ходит одна, и морская безграмотность рыбмастера, да безопасный только в штилевых условиях «автоломатель» рулевых машин «Аист» вновь привели к трагическим последствиям на умеренно-слабом штормовом волнении.
В практике разбора морских аварий традиционно действует жесткое правило безусловной вины капитана и ходовой вахты, которые задним числом всегда могли бы предусмотреть нечто и предотвратить аварию и гибель людей. Но это «верное» и очень древнее морское правило может быть справедливо только в том случае, если побывавшие в экстремальных ситуациях мореплаватели затем активно участвуют в решении того, как избежать кораблекрушения в шторм. А наиболее эффективным путем повышения штормовой мореходности кораблей и судов может быть только привлечение бывалых капитанов и судоводителей к активнейшему участию в выработке ключевых проектных решений при строительстве нового океанского флота.
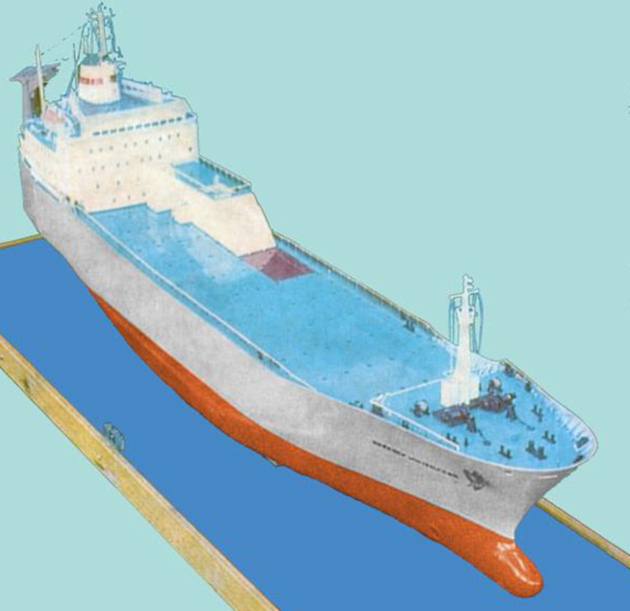
А потому в заключение анализа штормовых случаев, необходимо вспомнить о судьбе судна с горизонтальной грузообработкой, ролкера «Механик Тарасов».
16 февраля 1982 г. советское грузовое судно “Механик Тарасов” на пути из Канады в СССР затонуло в 240 морских милях от Ньюфаундленда. Из 37 членов экипажа спасли пятерых.
15 февраля 1982 г. советский теплоход “Механик Тарасов” направлялся через Атлантику из канадского порта Три-Риверс в Гамбург. Он получил сигнал SOS с канадской буровой платформы “Оушен Ренджер“. В условиях сильного шторма (12-метровые волны, скорость ветра до 35 м/с) «Механик Тарасов» изменил курс и пошел на помощь нефтяной платформе. Через несколько часов волны сбили две колонны носовых трюмных вентиляторов теплохода, и вода стала заливать трюмы и насосы рулевого управления. Так описаны события у берегов Канады в общедоступной литературе.
Экипаж до последней минуты верил в надежность своего нового сверхсовременного судна и, не пытаясь его покинуть, отвечал подошедшему на помощь датскому рыболовному судну «Сицурфари»:
Все пока на борту.
Виктор Конецкий отмечает, что
было что-то символическое в том, что к погибающему “Механику Тарасову” первыми на помощь бросились БМРТ20-559 “Толбачик” и БМРТ-244 “Иван Дворский”. Профессионалы знают, что высота борта таких судов чрезвычайно затрудняет возможность поднять с воды оказавшихся в море людей. … реальную помощь погибающим оказали датские рыбаки с СРТ21 “Сицурфари”. Хотя мы всегда стараемся обойти рыбаков на почтительном расстоянии, я искренне убежден в том, что самые морские моряки – это рыбаки …
Расследование причин кораблекрушения «Механика Тарасова» привело к появлению множества вопросов о штормовых мореходных качествах новейших для того времени кораблей и судов океанского флота. Береговые службы мореплавания, как это общепринято, всю вину за гибель ролкера финской постройки возложили на капитана. Но все же бесконечные дискуссии об этом корабле, в основном носившие технико-политический характер, свелись к четким фразам заключения в форме мелвилловского «косвенного сленга».
Что это означает?
- Через воздухозаборники очень высокой верхней палубы ролкера вода может попасть только в шпигаты на его главной водонепроницаемой палубе, никак не повлияв на плавучесть корпуса в целом.
- гидравлические «насосы» рулевых машин установлены в специально оборудованном кормовом румпельном отделении, находящемся выше ватерлинии.
Шторм был вполне умеренным. В те годы, пока велось расследование причин кораблекрушения, никто не скрывал свидетельств о канадских вертолетах, которые предлагали снять экипаж с подававшего сигнал SOS «Механика Тарасова». Однако экипаж, как один, верил в свое судно и до последней минуты вел борьбу за его жизнь.
Можно ли смягчить вину погубившего ролкер капитана? Да!
Простой взгляд на форму корпуса корабля с широкой транцевой кормой, очень высоким бортом и с широкими «развесистыми» носовыми скулами не оставляет сомнений в том, что на умеренном волнении у него возникает интенсивная килевая качка. Если же у такого судна гребни волн попадают на высоченную носовую палубу, то в следующий момент нос корабля может взлететь выше гребней штормовых волн, явно демонстрируя, что вертикальные ускорения в оконечностях корпуса превышают ускорение свободного падения, характерные для гребней штормовых волн и их девятых валов. В таких условиях контейнеры могут на несколько секунд отрываться от палубы и, оказавшись в невесомости, лететь в сторону пустых твиндеков.
Разогнавшись до большой скорости, тяжелые контейнеры способны повредить обшивку корпуса ниже главной Конструкция поперечных и продольных переборокводонепроницаемой палубы.
Траулер “Иван Дворский” опоздал буквально на несколько минут. В момент его подхода “Механик Тарасов” уже скрылся в волнах.
Люди оказались в бушующем море, в темноте, в ледяной воде, но на спасательных жилетах многих из них вспыхнули лампочки. Только маленький датский траулер “Сицурфари” был способен поднимать моряков из воды. Однако большинство из них погибло от переохлаждения.
Гидродинамические условия штормового плавания
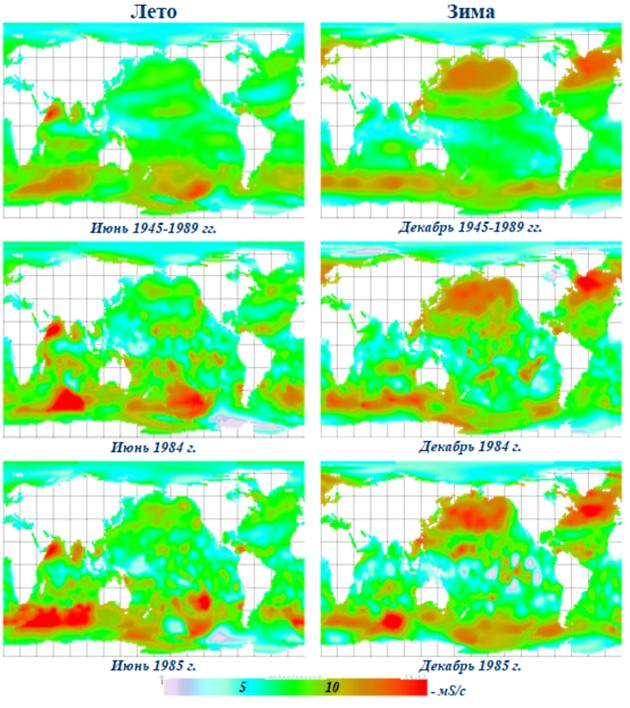
Морское волнение и поверхностные течения являются опасными для мореплавания природными явлениями, которые всегда необходимо учитывать как при проектировании нового корабля, так и его последующей эксплуатации. Штормовые условия плавания определяются активным взаимодействием корабля со шквальными порывами ветра и интенсивным волнением, проявляющегося в виде поступательных и круговых движений водных масс, которые могут образовываться в очень широком спектре длин волн и периодов колебаний.
Плавание в прибрежной зоне усугубляется дополнительными опасностями, вызываемыми длиннопериодными колебаниями уровня моря и экстремальными течениями, возникающими в результате трансформации штормовых волн и волн зыби, их активным взаимодействием с прибрежными длинноволновыми процессами и осложненными сильной стратификацией плотности воды вблизи устьев рек.
При сложении неблагоприятных гидродинамических процессов, судоходство вблизи побережья или проход судов через узкости и ворота морских портов может представлять опасность даже при относительно спокойной погоде.
Классификация морских волн
Морские волны можно классифицировать по различным признакам. По силам того, как образуются волны, т. е. по происхождению, можно выделить в океане (море) следующие виды волн:
- ветровые – вызванные ветром и находящиеся под его воздействием;
- корабельные – создающиеся при движении корабля и тайфунов;
- приливные – возникающие под действием периодических сил притяжения Луны и Солнца;
- анемобарические – связанные с отклонением поверхности океана от положения равновесия под действием ветра и атмосферного давления;
- сейсмические (цунами) – возникающие в результате динамических процессов, протекающих в земной коре, и в первую очередь подводных землетрясений, а также извержений вулканов, как подводных, так и прибрежных;
- прибрежные – сейшевые или захваченные волны, рождающиеся у морского побережья с повышенными резонансными свойствами.
Практически всегда на поверхности открытых морей и океанов наблюдаются зыбь, ветровые и приливные волны. Только ветровые волны и зыбь оказывают непрерывное и повсеместное воздействие на корабль, другие же волновые движения имеют слишком большие периоды и длины волн и могут оказать губительное воздействие на корабль только на мелководье или в непосредственной близости от побережья.
По силам, которые стремятся возвратить частицу воды в положение равновесия, различают:
- капиллярные;
- и гравитационные волны.
В первом случае восстанавливающей силой является сила поверхностного натяжения, во втором – сила тяжести. Капиллярные волны малы по своим размерам и образуются либо в первый момент воздействия ветра на водную поверхность (рябь), либо на поверхности основных гравитационных волн (вторичные волны). В море главное значение имеют гравитационные волны.
По действию силы после образования волны выделяют волны свободные, когда сила прекращает действие после образования волны, и вынужденные, когда действие силы не прекращается. По расположению различают поверхностные волны, возникающие на поверхности моря, и внутренние, возникающие на глубине и почти не проявляющие себя на поверхности. По форме выделяют двухмерные волны, средняя длина гребня которых во много раз больше средней длины волны, трехмерные, средняя длина гребня которых соизмерима с длиной волны, и уединенные, имеющие только куполообразный гребень и не имеющие подошвы.
Если на гребне уединенной волны поместить поплавок, он будет перемещаться вместе с гребнем. Поэтому уединенную волну иногда называют переносной волной.
По соотношению длины волны и глубины моря различают короткие волны, у которых длина волны значительно меньше глубины моря, и длинные, у которых, напротив, длина волны значительно больше глубины моря.
По перемещению формы волны выделяют волны поступательные, или прогрессивные (рис. 7), видимая форма которых перемещается в пространстве, и стоячие (рис. 8), узловые линии и вершины которых в пространстве не перемещаются.
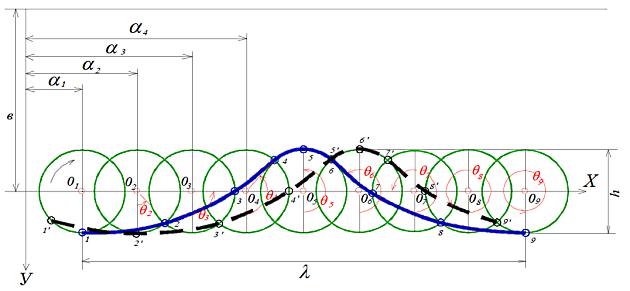
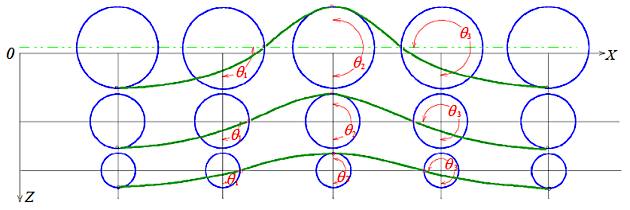
Прогрессивные волны характеризуются тем, что у них перемещается видимая форма (профиль). Частицы же воды движутся по почти замкнутым орбитам, имеющим форму, близкую к окружности или эллипсу. Любой небольшой предмет, находящийся на поверхности моря, также будет совершать круговые колебательные движения, соответственно движению частиц воды по их орбитам.
Видимое перемещение формы (профиля) волны можно пояснить следующим образом. Предположим, что частицы воды совершают движение по замкнутым круговым орбитам (рис. 7). Если импульс силы, вызывавшей волнение, действовал слева, то частицы, действующие правее, придут в движение позже и поэтому будут отставать по фазе от частиц, расположенных левее, и займут в момент времени положения 1, 2, 3… Проведя кривую через эти точки, получим профиль волны в момент времени t1 (сплошная кривая). Теоретически частицы воды движутся по орбитам с одинаковой угловой скоростью. Поэтому в следующий момент времени t2 они переместятся на своих орбитах на один и тот же угол и займут положения 1′, 2′, 3′ … Проведя пунктирную кривую через указанные точки, получим профиль волны в момент времени t2. Как видно на рисунке, профиль волны сместился в направлении действия силы, хотя частицы воды двигались исключительно по круговым орбитам, вокруг собственных центров вращения.
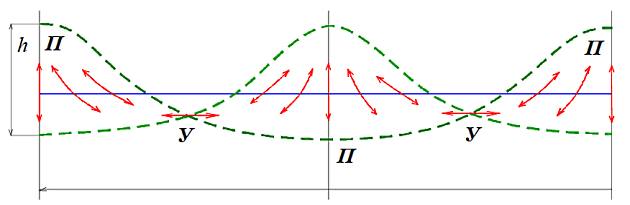
Стоячие волны. При стоячей волне частицы воды не совершают движений по круговым орбитам (рис. 8).
В пучностях, т. е. в точках, где амплитуда колебания уровня наибольшая, частицы двигаются только по вертикали.
В узлах, т. е. в точках, где колебания уровня отсутствуют, частицы двигаются только в горизонтальном направлении. На схеме показаны три положения поверхности моря при стоячих волнах: два крайних (пунктирные линии) и средние (сплошная линия). Буквой У обозначены узловые точки (узлы), а буквой П – пучности. Стрелками на линии среднего уровня показаны орбиты частиц в различных точках волнового профиля.
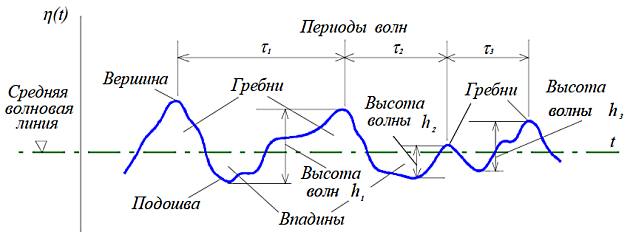
Элементы волны. Каждая волна, поступательная или стоячая, характеризуется определенными элементами. Общими для обоих типов волн являются следующие элементы.
- Волновой профиль – кривая, получаемая в результате сечения взволнованной поверхности моря вертикальной плоскостью в заданном направлении (обычно в направлении распространения волн).
- Гребень волны – часть волны, расположенная выше среднего волнового уровня.
- Вершина волны – наивысшая точка гребня волны.
- Ложбина волны – часть волны, расположенная ниже среднего волнового уровня.
- Подошва волны – наинизшая точка ложбины волны.
Высота волны h – превышение высоты волны над соседней подошвой на волновом профиле, проведенном в генеральном направлении распространения волн. Высота волны равна удвоенной амплитуде или удвоенному радиусу орбиты поступательной волны при круговых орбитах. Длина волны λ – горизонтальное расстояние между вершинами двух смежных гребней на волновом профиле, проведенном в генеральном направлении распространения волн. Крутизна волны – отношение высоты данной волны к ее длине. Крутизна волны в различных точках волнового профиля различна. Для удобства характеристики крутизны волны пользуются отношением высоты к длине (h/λ), называемое средней крутизной волны. Частота формы волны:
Перечисленные элементы определяют геометрические характеристики волны. Для поступательной волны необходимо добавить еще три элемента.
Направление распространения волн, отсчитываемое по часовой стрелке от норда в сторону их движения.
Фронт волны – линия на плане взволнованной поверхности, проходящая по вершине гребня данной волны, которая определяется по множеству волновых профилей, проведенных параллельно генеральному направлению распространения волн.
Длина гребня волны – протяженность гребня волны в направлении ее фронта. Луч волны – линия, перпендикулярная фронту волны в данной точке.
Кроме элементов, определяющих геометрические характеристики волны, выделяют кинематические элементы. К ним относятся: период волны τ – интервал времени между прохождением двух смежных вершин волн через фиксированную вертикаль. σ = 2π/τ – частота проявления волн во времени. Период волны можно определить и как время обращения частицы по ее орбите. Для стоячей волны период определяется промежутком времени, за который совершается полное колебание уровня.
Читайте также: Коллективные спасательные средства на морских судах
Скорость распространения, или фазовая скорость с – скорость перемещения гребня волны в направлении ее распространения. За время полного оборота частицы по своей орбите, т. е. за период волны τ профиль волны сместится на расстояние, равное длине волны λ.
Таким образом определяется фазовая скорость распространения волны c = λ/τ. Реальные ветровые волны всегда трехмерные, и для них также, как и для стоячих волн, затруднительно определить период по скорости перемещения гребня. В этом случае вводится понятие периода волны в одной точке (рис. 9).
Поэтому для трехмерных волн вводится еще одно дополнительное понятие – высота трехмерных волн. Она находится как разность по вертикали между наивысшим уровнем вершины, определяемым как наивысшая точка гребня волны, расположенного выше среднего волнового уровня, и уровнем подошвы, представляющим наинизшую точку ложбины среднего волнового уровня (рис. 10).
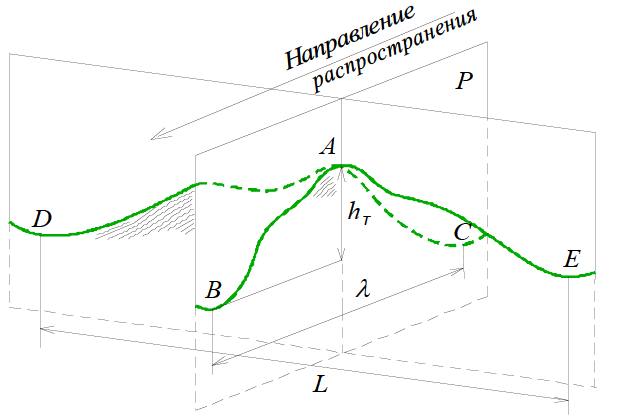
На схеме трехмерной волны:
- hT – высота трехмерной волны, определяемая как вертикальное расстояние между высотами уровня в точке A (вершина) и B (подошва) профиля волны;
- λ – длина волны, a L – длина гребня.
Опасности морских волн могут быть весьма существенными и представлять серьезную угрозу для судоходства, прибрежных сооружений и даже для жизни людей. Важно понимать, что морские волны являются мощной силой природы, которую нельзя полностью контролировать. Однако, соблюдение мер безопасности и использование современных технологий позволяет значительно снизить риски, связанные с волнами.
Построение модели волнового поля на основе реальных наблюдений в штормовом море
Двумерная модель трохоидальной теории волн на глубокой воде определяет движение частиц жидкости по круговым траекториям, при этом радиус кривизны убывает по экспоненциальному закону с глубиной:
где:
- r0 – теоретическая полувысота волны на поверхности моря;
- z – глубина моря.
Соответственно убыванию радиусов орбит частиц убывают и подводные волновые колебания толщи воды:
при которых изобарические поверхности расположены дальше друг от друга под гребнем волны, где вес частиц уменьшен центробежными силами, и ближе под подошвой, где он увеличен. Скорость распространения трохоидальной волны зависит только от ее длины:
с глубиной она не меняется, так же как не меняются период и длина этой волны. Скорость движения элементарных частиц жидкости определяется через произведение частоты колебаний (круговой скорости) и радиуса дуги траектории:
Скорость движения частиц жидкости возрастает с уменьшением глубины z. На вершине волны эти частицы перемещаются с максимальной скоростью в направлении движения ее гребня. Допустим, что скорость частиц жидкости не должна превышать скорости распространения корабельной волны, так как это является условием разрушения волнового гребня. В этом случае при скорости Vr = С, может быть получена оценка максимального радиуса как: rm = λ/2π или высоты волны как h · k = 2, что соответствует острому гребню волны, вида:

Аппроксимируя экспоненту отрезком прямой линии: exp(k · z’) ≈ 1 + k · z и допуская, что на вершине волны z = h/2, можно получить другое приближение величины экстремальной амплитуды трохоидальной волны:
Численное приближение дает предельную оценку теоретической высоты волны как: h · k ≈ 1,134. При построении прогрессивных волн на свободной поверхности. Эта оценка должна использоваться в качестве максимального радиуса трохоиды. Численный расчет экстремумов для такой трохоидальной волны, с учетом снижения амплитуды на подошве волны, приводит к оценке высоты волны как: h · k ≈ 0,75 или λ/h ≈ 8.38, что соответствует прогрессивной волне с обрушающимся гребнем.
Полученная плоская трохоидальная волна соответствует предельно возможному отношению амплитуды к длине прогрессивной штормовой волны: h = 0,375 · λ/π. 0,12 · λ. Максимальный угол наклона поверхности такой волны достигает 30°, что представляет высокую опасность для корабля, и особенно, если он поддерживает штормовой ход навстречу волне.
Практически всегда на взволнованной поверхности моря присутствуют волны подобной крутизны, о чем свидетельствуют вспененные на гребнях буруны.
И все же в штормовом море практически никогда не реализуются высокие волны более чем с двумя последовательно идущими крутыми гребнями, так как даже на начальных этапах того, как образуются ветровые волны, они начинают собираться в групповые структуры трехмерных пакетов волн. Ветровое волнение с длинами волн более 10 метров образуется только постепенным накоплением внешней энергии, и потому природа штормовых волн с большими периодами определяется динамическими свойствами их свободного распространения, что также связано с трансформацией плоских волн к трехмерному виду с ярко выраженной групповой структурой.
Для получения профиля групповой структуры трохоидальных волн используется сложение двух волновых колебаний с близкими частотами, что позволяет моделировать групповые структуры в виде волновых биений (рис. 12). Фазовые углы добавочной волны уменьшены с коэффициентом пропорциональности 0,889, амплитуда также снижена до уровня: hдоб = h/1,1342, что не позволяет суммарной волновой трохоиде сделать петлю на вершине максимальной волны.

Самая крупная в групповом пакете волна, называемая на море девятым валом, в динамике своего движения всегда проявляется как малоподвижная или стоячая волна. Стоячий девятый вал может иметь удвоенную высоту в сравнении с прогрессивной волной, отчего его угол склона вблизи гребня может достигать 60°. Но все же малая подвижность девятого вала делает его относительно безопасным для судна, штормующего без хода. Если же корабль поддерживает высокую скорость хода в условиях штормового волнения, то желательно, чтобы обводы его корпуса были адаптированы к условиям жестких встреч с крутыми и высокими девятыми валами.
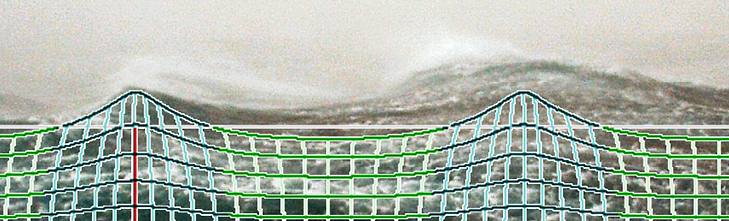
Верхняя темная линия показывает форму исходной волны с предельной крутизной: h · k ≈ 0,75 (λ = 60 м, τ = 6,2 c, h = 7,16 м). Девятый вал в групповой структуре также имеет максимально допустимую теоретическую высоту для стоячей волны, при крутизне h · k ≈ 2. Затененные области отмечают глубину волновых возмущений, превышающих 1 % от высоты волны на поверхности
Групповая структура волн, близкая по форме к плоским волнам (рис. 12), может сложиться только в относительно узких морских проливах или на реках. В открытом море пакеты волн не проявляются в столь строгой последовательности, что заметно облегчает условия штормового плавания.
В таблице 1 приведены экстремальные оценки для морских волн с периодами от 1 до 15 сек. Hmax – высота прогрессивной волны с обрушающимся гребнем на глубокой воде, в котором поток воды движется со скоростью, равной фазовой скорости фронта волны С. Важно отметить, что свежие ветровые волны, с ярко выраженной групповой структурой, могут быть существенно выше, чем показанные в таблице 1, но вследствие малой подвижности их девятых валов, они не представляют столь же высокой опасности для малоподвижного или аварийного корабля без хода.
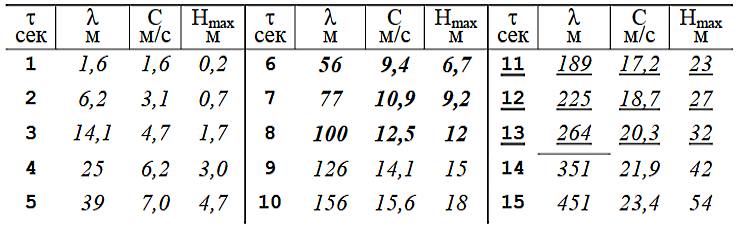
Для морских акваторий характерными являются периоды волн от 6 до 8 сек (выделено жирным), что соответствует длине волны порядка 80 м, максимальной скорости потока в гребне волны – 10 м/с (20 узлов) и экстремальной амплитуде волны порядка 10 м. В открытом океане период волн может достигать 15 секунд и более, но только для волн зыби, имеющих относительно малую амплитуду, обычно без обрушающихся гребней.
На побережье открытого океана, при Яхтинг и влияние погодных условий на плаваниепрохождении штормов, нередко наблюдаются волны прибойной зыби с периодами порядка 11-13 секунд (подчеркнуто), высота которых существенно выше, чем у волн открытого моря. Именно поэтому плавание вблизи побережья или над морскими отмелями всегда представляет повышенную опасность для мореплавателей.
Групповая структура трохоидальных штормовых волн и зыби в открытом море
Поддержание штормовой мореходности корабля возможно при правильном учете гидродинамических свойств трохоидального волнения с обрушающимися гребнями «девятых» валов, непознанная мощь и чрезмерная опасность которых отмечается ныне российскими и зарубежными исследователями. В практическом судовождении традиционно используются модели волнения, которые представляются в виде наложения нескольких независимых систем волн:
- ветровое волнение совпадает с направлением действия ветра, а высота волн может быть предельно большой;
- две-три системы волн зыби, являющихся отголосками ранее прошедших или отдаленных штормов, при этом длина волн зыби обычно существенно больше, чем у ветровых, а крутизна – меньше.
В рамках теории Герстнера поле скорости и геометрическая форма гравитационных волн на глубокой воде оценивается параметрическим описанием траекторий частиц жидкости, движущихся в лагранжевых (локальных) координатах по циклоидам с переменным радиусом:
где:
- xW, zW – расчетные аппликата и абсцисса частиц жидкости, включившихся в волновое движение с изначальными параметрическими координатами: x, z;
- a – коэффициент амплитуды (полувысоты) волны относительно теоретического максимума: A = a · 1,134 · λ/(4π). Область определения аргументов a и x ограничена: 0 < a ≤ 1,0; z ≤ 0. Если коэффициент амплитуды будет задан отрицательной величиной: a < 0, то это изменит фазу волны на 180°, что признано нежелательным для сохранения однородной структуры волнового поля, а при необходимости такого изменения фазы можно добавить к абсциссе половину длины конкретной волны: λ/2.
Прогрессивные волны Герстнера представляют серьезную опасность для неуправляемого судна без хода, так как встречные течения в вершинах и впадинах волн стремятся поставить его корпус лагом, после чего возможен мощный силовой удар по надводному борту и последующее увлечение всего судна в интенсивный вихревой поток обрушающихся гребней штормовых волн.
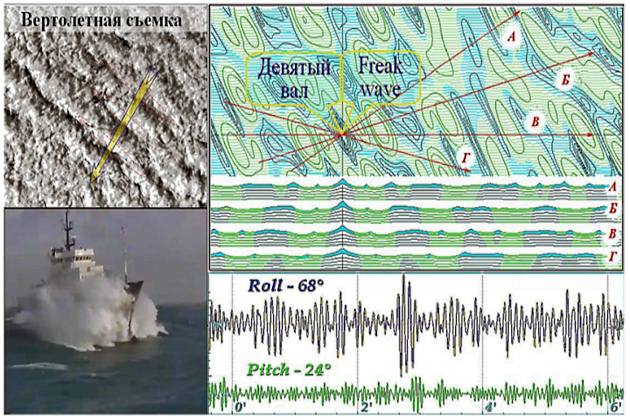
На глубокой воде трохоидальные волны никогда не ходят поодиночке. После объединения в групповые структуры образуются «девятые» валы – волны-убийцы существенно большей высоты, но менее опасные по силовому гидродинамическому воздействию, т. к. сформировавшиеся «девятые» валы значительно теряют в скорости свободного движения (рис. 13).
Эмпирическое построение поверхности моря для групповой структуры трохоидальных волн возможно в результате наложения встречной системы регулярных волн с фазовым коэффициентом: x′ = -0,889 · x и несколько меньшей высотой: a′ = a/1,286.
Амплитудные коэффициенты трохоидальных волн эмпирически подобраны так, чтобы при a = 1,0 угол склона вблизи вершины регулярной волны (формула 1) достигал 30°, а в случае групповой структуры волн (формула 2) угол склона вблизи вершины «девятого вала» превышает 45° (теоретически до 60°). Наибольшая вероятность встречи с такими волнами-убийцами характерна для условий плавания вблизи центров штормовых циклонов, где кроме гидродинамических условий зарождения девятых валов происходит прямая суперпозиция встречных штормовых волн, и где отчетливо наблюдается крутизна вплоть до 1/4, что существенно превышает теоретические оценки для прогрессивных волн с отношением высоты к длине порядка 1/7.
Что такое девятый вал?
Девятый вал олицетворяет собой максимальную опасность, которую таит в себе море. Он символизирует стихию, которую человек не в силах полностью контролировать. С точки зрения современной науки, понятие “девятый вал” не имеет строгого научного обоснования. Высота и сила волн зависят от множества факторов и не подчиняются строгой нумерации.
«Девятый» вал проявляет себя как стоячая волна, а движущиеся перед ним и вслед за ним крупные прогрессивные волны способны обрушиться на корпус судна мощными высокоскоростными потоками, с жесткими ударами по скулам корпуса, резкой качкой, и опасностью катастрофического подныривания под «девятый вал» с сильным носовым дифферентом на высокой скорости хода, ускоренной в динамике скатывания с гребня в глубокую впадину между волнами.
Предлагается к прочтению: Основные понятия об управляемости судна
При математическом построении пространственной картины волнового поля можно использовать профили групповых структур волн, дополнительно закладывая в математическую модель длину волнового фронта тем больше, чем меньше амплитудный коэффициент a, что будет соответствовать наблюдаемому на море вытягиванию и выположиванию фронтов морской зыби.
Показанная на рис. 14 математическая модель волнения вполне соответствует наблюдениям за реальным штормовым волнением в открытом море (фото слева), когда групповые структуры ветровых волн и волн зыби наиболее активны и следуют ячеистыми порядками с ярко выраженными гребнями «девятых валов».
Вертикальной линией в нижней части рис. 1 помечена теоретически максимальная волна, которая может быть названа «волной-убийцей». Но все же реальное морское волнение не является катастрофичным, судоводителю всегда предоставляются большие участки штормового моря, на которых отсутствуют особо крутые волны, и где позволительно Маневренные характеристики судна – устойчивость, поворотливость и ходкостьактивное маневрирование судна, в том числе для активного уклонения от встречи с особо крупными волнами.
На ходу корабля обычно 2-3 «девятых вала» проходят по борту, и лишь после этого происходит прямое столкновение с особо крупной волной (при условии, что рулевой не ведет корабль «по кочкам»).
Принимая характерный период штормовых волн Охотского моря равным 8 с, получаем, что для уклонения от жесткой встречи с крупной волной необходима заблаговременность прогноза «девятого вала» порядка 1-1,5 минут, что вполне может быть осуществимо с использованием вычислительных мощностей современных микропроцессоров.
Как на аэрофотоснимке, так и на эмпирическом волновом поле хорошо просматриваются короткие и крутые ветровые волны, а для обнаружения фоновых волн зыби судоводителю обычно приходится подниматься на верхний мостик корабля. При выборе штормового курса и скорости хода обычно учитываются только особенности ветрового волнения, параметры которого оцениваются по картине вспенивающихся гребней волн, наблюдаемых через брызгоотбойники в иллюминаторах ходовой рубки. В ночное время безопасность штормового плавания зависит только от интуиции судоводителя, которому абсолютно ничего не известно о состоянии моря, кроме, пожалуй, оценок силы и направления ветра. Если судно не обладает достаточной штормовой мореходностью, то при таком навигационном обеспечении судовождения, конечно же, не может идти даже речи о возможности эффективного и безопасного плавания произвольным штормовым курсом. Тем не менее, даже в столь «слепых» условиях безопасность плавания немореходного судна может поддерживаться активным штормовым маневрированием на курсе носом на волну или вразрез волне, что в свою очередь сопровождается большими перегрузками рулевых машин и валопроводов гребных винтов.
Оптимизация условий штормового плавания нуждается в надежной автоматической регистрации параметров штормового волнения, работающей в любых погодных условиях и условиях видимости. В современной судоводительской практике изучаются вопросы использования специальных океанографических радаров, способных уверенно регистрировать волновое поле и поле скоростей поверхностных течений с неподвижной береговой платформы. Интенсивно раскачивающееся судно существенно затрудняет анализ радиолокационных данных, тем не менее, режим отслеживания ближайших к судну штормовых волн мог бы стать неоценимым подспорьем в работе судоводителя, так как радиолокационное картирование волнового поля может использоваться в составе стандартных процедур автоматического управления судном в сложных условиях плавания.
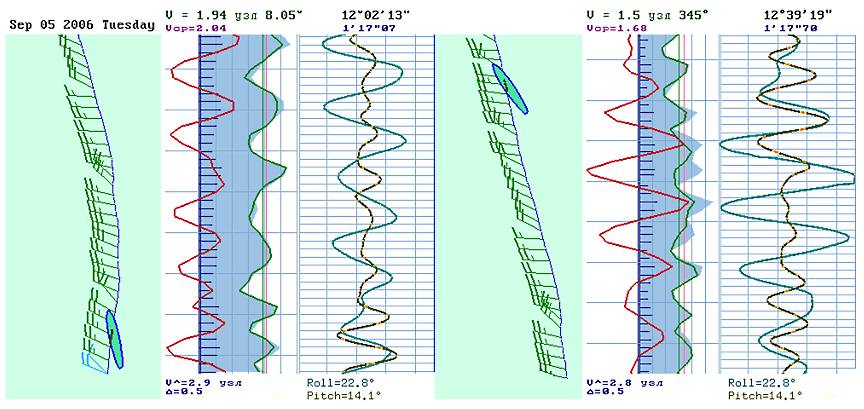
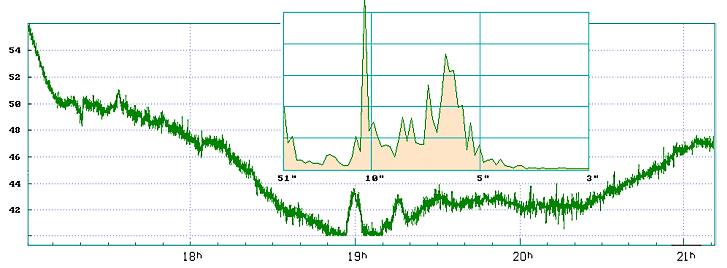
В качестве простого и надежного регистратора волнения может выступать также сам корпус корабля. По рис. 15 можно отметить синхронность изменения углов килевой и бортовой качки, измеряемой бортовыми инклинометрами, и с помощью оценки пульсаций скорости хода, определяемых по приращению географических координат судна.
Параметры собственных вертикальных колебаний, рыскания и качки могут оценены по текущей весовой загрузке корабля и кривым элементов Судостроительные чертежи и конструкторские документы по принятым стандартамтеоретического чертежа судна. В плавании на интенсивном волнении эти параметры должны адаптироваться к большим углам крена и дифферента по реальным записям регистрирующих приборов.
Такое уточнение может быть выполнено с помощью процедуры идентификации параметров дифференциальных уравнений качки корабля.
Быстрая оценка параметров штормовых волн, наиболее активно воздействующих на корпус корабля, может быть сделана по записям килевой качки, которая, ввиду малости периода собственных продольных колебаний корпуса, должна прописывать форму морских волн, соизмеримых с длиной корабля. Для прямого измерения параметров штормовых волн меньшей длины возможно использование океанографических радаров или забортных волнографов.
Анализируя эмпирическую модель штормового волнения, можно сделать вывод о том, что для восстановления реальной картины волнообразования необходимо провести замеры килевой качки корабля в секторе курсов ± 30°. В штормовом плавании в таком же секторе происходит естественное рыскание корабля на курсе, и потому не представляет дополнительных угроз для безопасности штормования. Сектор курсов для маневрирования при уклонении от девятых валов находится в пределах ± 15°, что вполне достижимо по времени реагирования движущегося судна при своевременной перекладке руля.
Сектор выбора оптимальных курсов относительно волнения также укладывается в ± 15°, что фактически позволяет держать произвольное интегральное направление движения (генеральный курс) с помощью оптимального лавирования между крупных гребней штормовых волн.
Рис. 16 иллюстрирует особый случай волнения на море – «толчеи», наблюдаемой в дифракционной зоне морских мысов или при плавании в центре глубокого циклона. Это случай наиболее интенсивного волнения, при котором крутые стоячие волны возникают совершенно непредсказуемо, а безопасность плавания корабля может быть обеспечена исключительно за счет обводов корпуса, при условии минимизации интенсивности силового взаимодействия корабля и морского волнения.
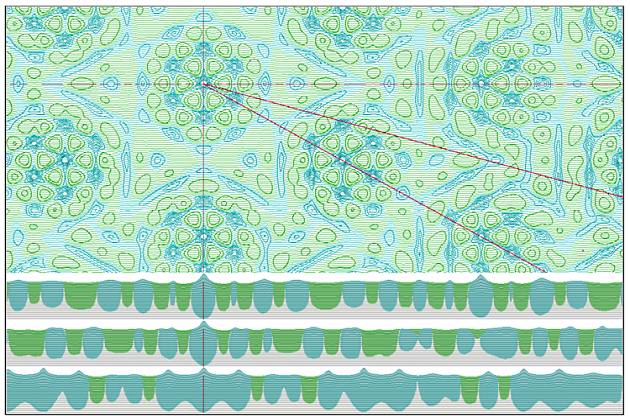
На вертикальных профилях волн, приведенных в нижней части рисунка, показаны различные курсы судна на одном и том же волнении, от выбора которых зависит интенсивность качки судна.
- Верхний профиль – обычный курс судна, отсчитывающего девятые валы.
- Средний профиль – оптимальный курс, на котором килевая качка будет минимальной.
- Нижний профиль – «плавание по кочкам», при котором условия обитаемости на корабле наихудшие.
Трехмерная эмпирико-аналитическая модель морского волнения удовлетворяет законам гидромеханики волн большой высоты и вполне применима для поисковых исследований в качестве модели внешней среды, как в случае разработки проектных оценок мореходности новых судов, так и для краткосрочных прогнозов силового воздействия волн в автоматических системах штормового маневрирования с целью стабилизации качки и оптимизации ходкости корабля.
Навигационный комплекс контроля состояния моря, атмосферы и мореходности корабля
Дальневосточные моря отличаются высокой штормовой активностью, частыми туманами и тяжелыми ледовыми условиями в зимние навигационные сезоны. Дальневосточные моряки хорошо знакомы с ураганными ветрами над морем, с гигантскими волнами зыби и экстремальными течениями вблизи прибрежных скал. Отсутствие защищенных от штормов заливов и гаваней, малая заселенность побережья и низкая активность каботажного мореходства в этом районе имеют следствием неразвитость навигационно-гидрографического обустройства, отчего море несет большие опасности как для мореплавателей, так и для населения на побережье Дальнего Востока России в целом.
Каждому моряку необходим немалый морской опыт для выполнения рейсовых заданий. Однако современная морская измерительная техника, вычислительные и информационные возможности бортовых компьютеров могли бы предложить капитану обоснованные рекомендации или оптимальные варианты судовождения в столь сложных или экстремальных условиях плавания.
Читайте также: Предупреждение столкновений судов
Внедрение в морскую практику автоматизированных систем мониторинга больших по площади морских акваторий и современных навигационных комплексов контроля состояния моря, атмосферы и мореходности корабля, является важным условием повышения эффективности дальневосточных морских коммуникаций в целом и обеспечения безопасности штормового мореплавания на каботажных маршрутах у Сахалина и Курильских островов.
Корабельный вариант метеостанции в комплекте с датчиками регистрации динамики корабля на волнении составляет основу универсальной бортовой аппаратуры для определения состояния моря, атмосферы и динамики их взаимодействия с движущимся кораблем. Характер морского волнения оценивается с помощью бортовых инклинометров и акселерометров, измеряющих параметры бортовой, килевой и вертикальной качки корабля.
Автоматически формируемый пакет гидрометеорологических данных, доставляемый по телеметрическим каналам связи в морские службы капитанов порта и в морские отделы управлений гидрометеослужбы, сможет образовать ключевой поток информации для использования в прогнозах опасных морских явлений вблизи побережья, а при необходимости и для выработки рекомендаций судоводителю о наиболее эффективных маршрутах и режимах плавания в открытом море. Эта же информация о динамике судна и состоянии моря, дополненная интегральными оценками условий плавания из береговых служб, может быть востребована судоводителем для решения навигационных задач; в первую очередь для повышения эффективности и безопасности штормовой эксплуатации корабля.
В 2001-2004 гг. на борту гидрографических судов ГС-210 и ГС-47, при активном участии сахалинских гидрографов, а в 2006 г. на борту НИС «Профессор Богоров» при поддержке нефтепромысловой компании «Сахалинская энергия», проводились длительные по времени наблюдения за динамикой судна, поверхности моря и атмосферы.
Бортовой комплекс измерительной аппаратуры был образован современными и вполне общедоступными измерительными датчиками, навигационными и гидрометеорологическими приборами, позволившими сформировать следующие массивы цифровых данных за весь период морской экспедиции:
- Измерение углов крена и дифферента датчиками ДК-1А гравитационного типа с точностью до 0,01° и частотой записи порядка 10-12 отсч/с;
- Измерение углов рыскания и параметров качки с использованием магнитометров типа HMR-3300 в качестве безынерционных компаса и инклинометров, работающих c точностью до 0,1° и частотой записи до 10 отсчетов в секунду;
- Изменение относительных координат, скорости и направления движения судна с использованием приемников GPS c точностью до ± 1 м с интервалом 1 с;
- Цифровая метеостанция с цифровым выходом на ЭВМ обеспечивала ежеминутные записи скорости ветра с точностью ±0,1 м/с, его направления ±2 румба; давление атмосферы ±0,1 мб и др.
- Бортовой навигационный или Судовые навигационные эхолотыгидрографический эхолот с цифровым выходом, если таковой имелся на судне, обеспечивал регистрацию глубины моря с частотой от 2-3 до 0,5 отсч/с., в зависимости от глубины под килем судна.
Для сопоставления измеренных данных с реальным состоянием моря в необходимо проводить визуальные наблюдения за параметрами морского волнения и зыби, отчасти уточняющие сравнения могут быть выполнены с использованием комплектов гидрометеорологических карт с приземным анализом и суточным прогнозом полей ветра и волнения по северо-западной части Тихого океана и Охотскому морю.
Как спрогнозировать шторм на море?
Комплексный анализ экспедиционных данных ориентирован на решение новых навигационных и гидрофизических задач в интересах создания автоматизированной системы контроля состояния моря и прогноза опасных морских явлений.
Унифицированная автоматическая гидрометеостанция в зависимости от круга решаемых задач может комплектоваться различными функциональными блоками:
- комплект синоптических датчиков для непрерывной регистрации состояния атмосферы (скорость и направление ветра, давление, температура и влажность воздуха и др);
- стандартный судовой комплект (считыватели показаний координат, курса и скорости судна, а также дополнительные датчики углов крена, дифферента и Качкавертикальной качки судна, в том числе получаемых с помощью путевого эхолота);
- система передачи телеметрических данных в одном из вариантов доступа в глобальную сеть (интернет) по системам дальней спутниковой, коротковолновой или прибрежной УКВ-радиосвязи;
- прибрежный комплект гидрофизических датчиков (регистратор уровня моря, температуры воды, волнения и, при необходимости – скорости течения);
- автономный шлюпочный комплект, дооснащенный компáсом и приемником Глобальной системы позиционирования (GPS).
Предполагается, что данный комплект измерительного оборудования и специальное математическое обеспечение позволят оперативно решать следующий круг задач:
а автоматический сбор, обработка и передача оперативной информации о состоянии моря и атмосферы по телеметрическим каналам связи на береговые центры, в соответствии с регламентом работы судовых гидрометеоцентров или гидрометеопостов;
б применение измерительного комплекса и оборудования связи с береговыми метеоцентрами в качестве автоматизированной экспертной системы для анализа режимов безаварийного плавания и оптимизации хода судна в условиях штормового волнения;
в реализация адаптированных к конкретным морским акваториям прямых вычислительных экспериментов с автоматизированной подготовкой начальных и граничных условий, моделирующих в реальном времени процессы взаимодействия атмосферы и океана, в том числе с возможностью прогноза развития опасных морских явлений;
г анализ волнового режима вблизи морских портов и на удаленных морских акваториях с использованием сети прибрежных гидрофизических станций, сочетаемых с параллельными наблюдениями с борта морских судов, проходящих вблизи контролируемого побережья.
Первые три задачи могут со временем утверждаться Росгидрометом к регламентному использованию на прибрежных и судовых гидрометеостанциях. Последняя задача может эффективно применяться в гидрографических изысканиях при проектировании новых портов, при подготовке к проведению Организация вахтенной службы при плавании судна в стесненных условияхдноуглубительных работ и реконструкции морских портов и гаваней. Для морских научных исследований оптимально было бы применять опытные образцы усовершенствованных гидрометеостанций, что позволит испытать новое оборудование в реальных морских условиях, и создаст условия для более частого использования в научных изысканиях современнейшей техники, в том числе с целью изучения необычных морских явлений.
К примеру, при изучении волнового режима вблизи сахалинского побережья был использован стандартный навигационный приемник GPS (рис. 18), с вынесенной на верхний мостик антенной, позволяет регистрировать бортовую качку как отклонение судна от курса, с высокой точностью замеряет пульсации скорости хода судна, что может служить как для оценки его ходкости на волнении, так и для регистрации динамики поверхностных течений по маршруту движения судна. Результаты таких наблюдений за пульсациями скорости течений приведены на рис. 18.
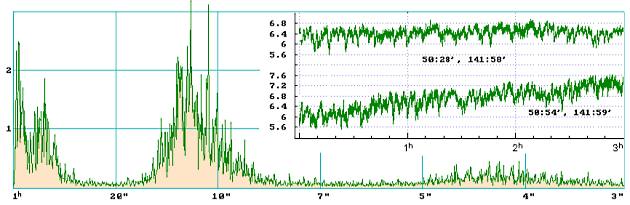
Путевая регистрация и анализ параметров качки и пульсаций скорости хода судна, сопоставление их с нагрузкой на движителях и динамикой перекладок руля необходимы при оптимизации хода судна в условиях умеренного волнения и для поиска решений при выборе безопасных режимов штормового плавания. По мере накопления данных о волновой динамике судов с различными обводами корпуса, они могут быть использованы при поиске оптимальных проектных решений о форме корпуса и общекорабельной архитектуре новых кораблей, что особенно важно для специализированных проектов, в которых функциональные требования к оборудованию или к условиям базирования не могут быть в полной мере согласованы с требованиями безопасности в штормовом плавании.
Характер взаимодействия корпуса корабля и штормового волнения может носить очень жесткий характер, особенно если обводы корпуса оптимизированы для какого-либо определенного режима плавания, к примеру – хорошей всхожести на волну для недопущения заливаемости верхних палуб, а режим реального волнения окажется принципиально отличным от принятого в оптимизационных функционалах. В любом случае, даже неоптимизированный для штормового плавания корабль может держать штормовой курс, если у штурвала стоит опытный рулевой и вахтенный штурман обладает достаточными знаниями хорошей морской практики. Такие знания могут быть получены судоводителями в случае их непосредственного участия в мореходных испытаниях опытовых телеуправляемых моделей судов, с последующим анализом результатов для разработки рекомендаций мореплавателям.
Бортовые счетно-решающие комплексы и штурманские базы знаний
Современные технологии открывают новые возможности для повышения безопасности и эффективности мореплавания, особенно в сложных метеоусловиях. Интеграция береговых систем мониторинга с бортовыми системами автоматического управления судами позволяет создавать комплексные решения для обеспечения всепогодного мореходства.
Ключевым элементом таких систем является использование океанографического радара. Он позволяет получать детальную информацию о состоянии моря в режиме реального времени, что необходимо для построения точных моделей гидромеханики. Эти модели, в свою очередь, используются для прогнозирования поведения судна в различных условиях и разработки оптимальных стратегий управления.
Важную роль играют и динамическое математическое моделирование штормов. Они позволяют оперативно прогнозировать встречу судна со штормовой волной и адаптировать управление судном к изменяющимся условиям.
Анализ килевой качки также предоставляет ценную информацию о состоянии моря и эффективности маневрирования судна. Данные, полученные с помощью таких систем, могут быть использованы для обучения экипажей и разработки новых методик управления судном.
Предлагается к прочтению: Применение опыта управления моделями судов на практике
Мореходные испытания телеуправляемых моделей судов в сложных условиях позволяют на практике изучить взаимодействие судна со штормовым морем и получить ценные рекомендации для повышения безопасности мореплавания.
Трехмерная эмпирико-аналитическая модель морского волнения, разработанная на Сахалине, может быть использована для оценки мореходности новых судов на стадии проектирования и для краткосрочных прогнозов в системах автоматического управления.
Преимущества внедрения таких систем:
- Снижение риска аварийных ситуаций и обеспечение всепогодного мореходства.
- Сокращение простоев в порту и оптимизация маршрутов.
- Снижение уровня качки и улучшение условий работы.
Комплексное применение перечисленных технологий и подходов позволит существенно повысить безопасность и эффективность мореплавания в сложных условиях, особенно в регионах с суровым климатом.





