Грузоподъемные устройства судна являются неотъемлемой его частью, без которых невозможно осуществлять погрузку, выгрузку и перемещение грузов. Они обеспечивают эффективную и безопасную работу с различными типами грузов, от контейнеров до крупногабаритных конструкций. В зависимости от назначения и конструкции, ГПМ на морских судах могут быть представлены различными видами, каждый из которых имеет свои особенности и принципы эксплуатации.
В данном материале рассмотрим типы грузоподъемных механизмов, их устройство, ключевые особенности и правила эксплуатации на морских судах. В частности, будет уделено внимание грузовым и буксирным лебедкам. Мы детально разберем их конструкцию, назначение и специфику работы в условиях морской среды.
Общие сведения о грузоподъемных механизмах
В данном пункте рассмотрим основные виды грузоподъемных механизмов для морских судов. Морские суда, перевозящие различные грузы, оборудуют Грузоподъемные механизмы современных морских судовгрузоподъемными механизмами и устройствами, обеспечивающими выполнение погрузочно-разгрузочных работ. Большинство транспортных судов снабжают для этой цели грузовыми стрелами и обслуживающими их грузовыми лебедками.
На некоторых судах специального назначения (углерудовозы, зерновозы, китобазы, ледоколы) вместо грузовых стрел или в дополнение к ним ставят грузовые краны.
Судовые грузовые краны по сравнению со стрелами имеют более короткий погрузочный цикл, постоянно готовы к действию, требуют меньше обслуживающего персонала, но конструкция их более сложна и дорогостояща и при одинаковой грузоподъемности вылет у кранов значительно меньше, чем у стрел.
На транспортных и рыбообрабатывающих судах флота рыбной промышленности, занимающихся перегрузкой рыбопродукции с добывающих судов в открытом море, также применяются грузовые стрелы как более простые и достаточно удобные грузовые средства, обеспечивающие безопасную перегрузку продукции при волнении моря до 6 баллов.
Кроме перегрузки рыбопродукции и вспомогательных грузов, грузовые лебедки и стрелы на судах флота рыбной промышленности используются для пересадки людей с одного судна на другое, что сопряжено с определенным риском, особенно в свежую погоду. Поэтому ведутся работы по созданию грузовых устройств, обеспечивающих безопасные условия пересадки людей и лучшую сохранность передаваемого груза. По мнению ряда специалистов, эта проблема может быть решена применением в судовых грузовых устройствах следящих систем.
Будет интересно: Судовые подъемные краны: теория расчета и практические аспекты эксплуатации
На добывающих судах к грузоподъемным механизмам, кроме грузовых лебедок, относятся траловые лебедки и другие промысловые механизмы, предназначенные для спуска и подъема орудий лова.
Эксплуатация грузоподъемных механизмов на судах должна соответствовать следующим требованиям, установленным правилами технической эксплуатации:
- грузоподъемный механизм должен обеспечивать безопасное проведение погрузочно-разгрузочных работ с сохранением груза и его тары;
- груз должен подниматься без сотрясений и рывков;
- необходимо, чтобы на грузоподъемном механизме имелись устройства для остановки груза на любой высоте и для регулирования скорости движения груза, а также ручной или ножной тормоз;
- вес поднимаемого груза не должен превышать максимальной грузоподъемности, указанной на каждой стреле;
- грузоподъемные механизмы на судне должны быть удобны, просты и безопасны при обслуживании;
- при обесточивании приводного двигателя движение груза должно автоматически прекращаться.
Перед каждой погрузочно-разгрузочной операцией все грузоподъемные устройства судна должны быть осмотрены и опробованы вхолостую.
Согласно правилам Регистра РФ грузовое устройство периодически освидетельствуется и испытывается инспектором Регистра, выдающим документ на право его эксплуатации.
Все грузовые стрелы судна и детали, постоянно укрепленные на стрелах, мачтах и палубах, должны подвергаться осмотру инспекторами Регистра через каждые 12 месяцев.
Полное освидетельствование и испытание судовые грузовые устройства должны проводится Регистром РФ один раз в четыре года.
Если грузоподъемные устройства судна, их механизмы, металлоконструкции или детали были заменены, переоборудованы или проходили ремонт, то они должны быть подвергнуты внеочередному освидетельствованию и испытанию.
Независимо от периодических осмотров грузоподъемное устройство должно подвергаться ежеквартальному освидетельствованию судовой администрацией с занесением результатов осмотра в Судовой журнал: теоретические основы и практические рекомендациивахтенный журнал и формуляры. При этом особенно внимательно должны осматриваться:
- тросы,
- гаки,
- скобы,
- блоки,
- шпоры,
- стрелы,
- колонны,
- тормозные устройства.
Грузовые лебедки
На большинстве современных транспортных и промысловых судов флота рыбной промышленности используются электрические грузовые лебедки с приводом от электромоторов постоянного и переменного тока. Все более широкое применение находят трехскоростные лебедки переменного тока, как более простые и дешевые в изготовлении и в эксплуатации, хотя и несколько уступающие в маневренности лебедкам постоянного тока.
Наряду с электрическими лебедками на большой серии производственно-транспортных рефрижераторов, установлены гидравлические грузовые лебедки. Преимущества гидравлических лебедок (бесшумная работа, нечувствительность к перегрузкам, простое изменение тяговых режимов, бесступенчатая регулировка скорости, длительный срок службы и т. д.) дают основание предполагать, что лебедки этого типа, как и другие гидравлические механизмы, будут находить все более широкое распространение на транспортном и промысловом флоте.
В настоящее время паровые поршневые судовые грузовые лебедки практически не используются в морском флоте. Они были вытеснены более современными, эффективными и компактными системами. Рассмотрим паровые поршневые грузовые лебедки, которые применялись на судах ранее. На рис. 1 показана стандартная паровая лебедка (соответственно вид сверху и вид сбоку), которая использовалась на многих транспортных судах флота рыбной промышленности.
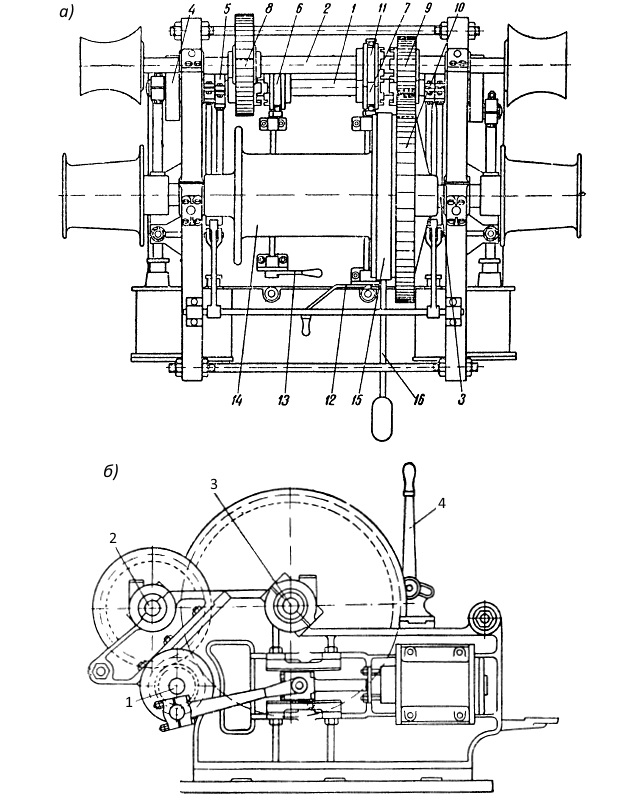
а – вид сверху; б – вид сбоку
Рассмотрим устройство грузовой лебедки. Двигателем лебедки является двухцилиндровая паровая машина, работающая с небольшим расширением пара. Реверс ее осуществляется кулисой. Тяговая часть лебедки состоит из:
- машинного вала 1;
- промежуточного вала 2;
- грузового вала 3,
подшипники которых монтируются на съемных кронштейнах.
На концах машинного вала закрепляются кривошипные диски 4, золотниковые эксцентрики 5 и свободно насаживаются две одинаковые цилиндрические шестерни, закрепление которых на валу осуществляется при помощи кулачковых муфт 6, 7.
Одна из шестерен машинного вала находится в зацеплении с шестерней 8, закрепленной на промежуточном валу, а другая сцепляется непосредственно с большой шестерней 10, закрепленной на грузовом валу. С шестерней грузового вала находится в зацеплении и шестерня 9, свободно насаженная на промежуточный вал и закрепляемая на нем кулачковой муфтой 11.
Кулачковая муфта 11 и муфта 7 не могут быть включены одновременно, так как управляются одной рукояткой 12 и сблокированы таким образом, что при включении одной из них другая выключается.
Рукоятка 13 служит для управления муфтой 6. На грузовом валу закрепляется барабан 14, на котором имеется ленточный тормоз 15, зажимаемый педальным рычагом 16.
Лебедка этой конструкции обеспечивает две скорости подъема груза.
Первая скорость, характеризующаяся быстрым подъемом, но меньшим тяговым усилием, получается при непосредственной передаче вращения с машинного вала на грузовой. Для работы на этой скорости необходимо включить муфту 7 на машинном валу, убедившись предварительно в том, что муфта 11 выключена.
При второй скорости создается тяговое усилие, в 2,5 раза большее при пропорциональном уменьшении скорости.
Работа на второй скорости осуществляется при включенных муфтах 6, 11 и выключенной муфте 7. При таком положении муфт вращение с машинного вала передается на промежуточный, а с промежуточного – на грузовой.
Тяговый расчет грузовой лебедки проводится аналогично расчету Брашпили и шпили: конструкции и принципы работыпарового брашпиля. Исходной величиной является заданная грузоподъемность, которую при расчете увеличивают на 30 %, учитывая трение в блоках и вес грузового гака.
Диаметр цилиндра паровой машины определяется по формуле акад. Поздюнина, в которую вводится коэффициент среднего теоретического индикаторного давления k1, зависящий от степени наполнения:
Так как грузовые лебедки работают со степенью наполнения 0,85-0,87, то для них можно принять:
Электрические грузовые лебедки, применяемые преимущественно на теплоходах, имеют в своей тяговой части червячную пару и одну или две пары цилиндрических шестерен, через которые и передается вращение от электродвигателя к грузовому валу.
Проектируют лебедки только с цилиндрическими шестернями вследствие низкого КПД червячной передачи.
На рис. 2 показана электрическая грузовая лебедка рефрижераторного траулера типа «Пушкин», не содержащая в своей тяговой части червячной пары.
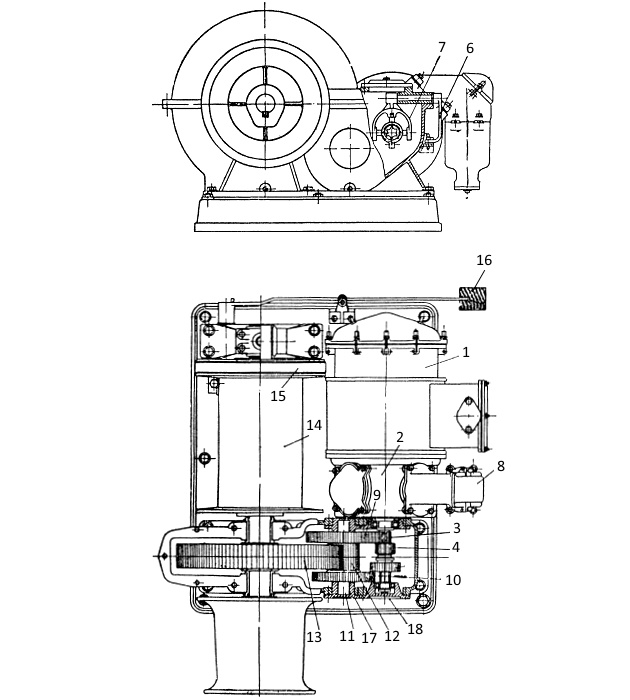
Эта лебедка, обеспечивающая два режима работы, обслуживается герметичным электродвигателем мощностью 12 кВт при 850 об/мин.
Электродвигатель 1 через муфту, помещенную в корпусе 2, соединен на прямую со шлицевым валиком 3, на котором посажен подвижной блок из шестерен 4 и 5. Перемещение блока по шлицевому валику осуществляется рычагом 6 через вилку 7. Соединительная муфта электродвигателя является одновременно диском для электромагнитного тормоза 8. Шестерня 4 может быть введена в зацепление с шестерней 9, а шестерня 5 – с шестерней 10, сидящей, как и шестерня 9, мертво на промежуточном валике 11 редуктора. На этом же валике закреплена шестерня 12, сцепляющаяся с шестерней 13, закрепленной на одном валу с грузовым барабаном 14. Барабан снабжен ленточным тормозом 15, обслуживаемым педалью 16.
Шестерни 4, 9 имеют передаточное отношение 1:4, шестерни 5, 10 – 1:2, а передаточное отношение шестерен 12, 13 составляет 1:5. Все шестерни помещены в закрытом водонепроницаемом корпусе и работают в масляной ванне.
Подшипники ведомого и промежуточного валов – скользящие, с бронзовыми вкладышами, а подшипники ведущего валика – роликовые. Для облегчения монтажа валиков и шестерен корпус снабжен съемными крышками 17, 18.
При зацеплении шестерен 5, 10 грузоподъемность лебедки равняется 2 т при большой скорости подъема, а при включении шестерен 4, 9 грузоподъемность возрастает до 4 т при снижении скорости подъема в 2 раза. Переключение скоростей необходимо осуществлять только при остановленной лебедке и при отсутствии груза на гаке. При Эксплуатация траловых и грузовых лебедок, уход за нимиэксплуатации лебедки основное внимание должно быть уделено проверке состояния электромагнитного тормоза, контроллера и смазке трущихся частей. У электромагнитного тормоза нужно периодически проверять натяжение пружины и величину хода тормозных колодок.
Натяжение пружины тормоза этих лебедок должно составить 20-25 кГ (≈200-250 Н), а ход тормозных колодок должен быть отрегулирован таким образом, чтобы их подъем начинался в конце хода сердечника электромагнита.
Осмотр контроллера надо проводить систематически с подчисткой контактных поверхностей наждачной шкуркой. Необходимо следить, чтобы пальцы входили в соприкосновение с секциями по всей контактной поверхности и прижимались к ним с достаточным давлением. Контактные поверхности контроллера нужно слегка смазывать техническим вазелином. При постоянном пользовании лебедкой все масленки надо ежедневно поворачивать на один-два оборота.
На рис. 3 показана типовая гидравлическая грузовая лебедка.
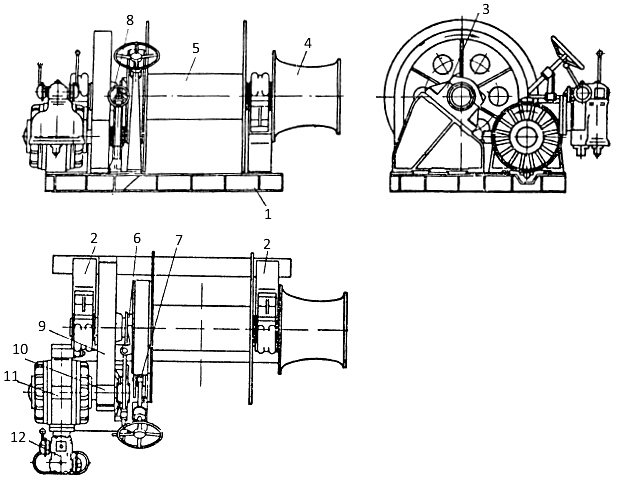
Она выпускается пяти типоразмеров с тяговым усилием от 3 до 20 тс (≈30-200 кН) (с интервалом через 2 тс (20 кН)) и скоростью подъема от 3 до 60 м/мин.
Лебедка имеет общую сварную фундаментную раму 1, на которой с помощью болтов крепятся опорные кронштейны 2 с наклонно расположенными подшипниками 3 для грузового вала лебедки. На грузовом валу неподвижно закрепляются турачки 4 и свободно насаживается грузовой барабан 5, закрепляемый при необходимости кулачковой муфтой 6. Барабан имеет тормозной обод, который охватывается ленточным винтовым тормозом 7. Для включения кулачковой муфты предназначен маховичок 8. На валу жестко закрепляется ведомая шестерня 9, находящаяся в зацеплении с ведущей шестерней 10, закрепленной на шпонке на валу гидромотора 11.
Гидромотор двухступенчатого типа стандартной конструкции (см. рис. «Якорные и швартовные механизмы на морских судахГидравлический мотор») снабжен маневровым блоком 12 с двумя управляющими рукоятками. Во время спуска и подъема груза барабан закрепляется на валу кулачковой муфтой, а при работе на турачках барабан отключается и стопорится ленточным тормозом. Кроме указанной конструкции, часто применяют лебедки, у которых ротор гидромотора насажен на одном валу с грузовым барабаном. Такая прямая передача применяется в основном для лебедки с тяговым усилием до 3 тс (≈30 кН).
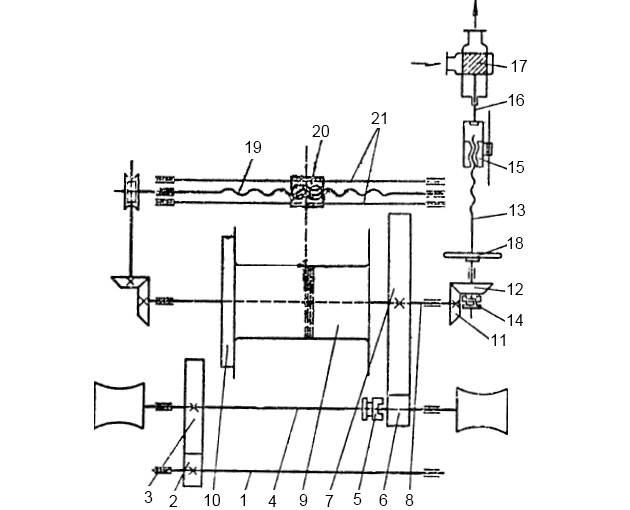
На рис. 4 изображен продольный разрез электрической грузовой лебедки специального назначения – так называемой машинной тали, используемой для монтажных работ в машинных отделениях судов.
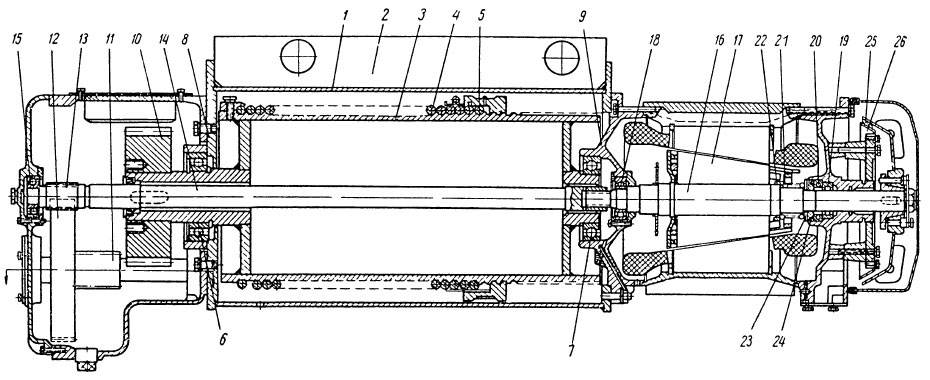
Машинная таль имеет сварной корпус 1, снабженный вертикальным ребром 2, за которое корпус прикрепляется к подвижной каретке. Каретка перемещается по направляющей балке, установленной на определенной высоте над Дистанционное автоматизированное управление главным двигателем суднаглавным двигателем. Перемещение каретки для талей грузоподъемностью до 5 т обычно производится вручную с верхней площадки двигателя через цепную передачу, действующую на червячный или зубчатый механизм перемещения каретки. Тали большей грузоподъемности имеют для перемещения каретки электрический привод. В корпусе имеется вырез, через который выходит сбегающий с барабана 3 конец троса 4, имеющий обычно на конце грузовой гак. Сварной барабан 3 имеет на наружной поверхности полукруглую резьбу, во впадины которой укладывается грузовой трос.
На резьбе барабана находится направляющее составное кольцо 5, из которого выходит подъемный конец троса. Кольцо снабжено направляющей, которая не дает ему вращаться, а позволяет поступательно перемещаться вдоль барабана на величину шага резьбы за каждый его оборот, обеспечивая тем самым укладку троса точно во впадины резьбы. Цапфы барабана лежат на шарикоподшипниках 6, 7, установленных в приливах крышек 8, 9 корпуса. На левой цапфе барабана закреплена шестерня 10, которая через пару шестерен (на чертеже не показаны) и шестерни 11, 12 находится в зацеплении с шестерней 13 приводного вала 14. Приводной вал 14, свободно проходящий внутри барабана, левым концом опирается на шарикоподшипник 15, а правым концом при помощи шлицевого соединения связан с валом 16 электромотора, на котором закреплен конический якорь 17. Вал электромотора лежит на роликовых подшипниках 18, 19 и имеет упорный шарикоподшипник 20. На валу ротора имеется нажимная пружина 21, опирающаяся одним концом через дистанционные кольца 22 в якорь электромотора, а другим концом через тарельчатую пружину 23 и дистанционное кольцо 24 – в упорный подшипник.
На конце вала электромотора закреплен тормозной диск 25, который при отсутствии электроэнергии заклинивается на тормозном конусе 26. Электроэнергия подводится к электромотору через гибкий кабель, снабженный кнопочной коробкой управления. При подаче электроэнергии ротор втягивается магнитным полем статора, получает небольшое осевое перемещение вместе с валом (около 1-2 мм) вправо и отжимает тормозной конус от тормозного диска. После освобождения тормоза ротор приходит во вращение и через вал 14 и набор шестерен приводит грузовой барабан, поднимая или опуская груз.
Как только подача энергии прекращается, пружина 21 отжимает ротор влево и подвигает тормозной диск на конус, вследствие чего барабан стопорится и надежно удерживает груз в любом положении. Таль снабжена концевыми выключателями (на рисунке не показаны), которые прерывают подачу энергии, когда грузовой гак находится в верхнем и нижнем предельных положениях.
При эксплуатации машинных талей необходимо:
- производить регулярный осмотр всего крепежа;
- следить за состоянием грузоподъемного троса;
- перед каждым использованием тали проверять работу тормоза;
- периодически проверять состояние концевых выключателей;
- не реже одного раза в месяц производить смазку направляющей резьбы барабана и самого троса графитовой смазкой;
- не реже одного раза в год менять смазку в коробке приводных шестерен;
- периодически очищать от грязи и масла направляющую балку.
Буксирные лебедки
В данном пункте рассмотрим устройство и обслуживание буксирных лебедок для морских судов. Буксирные лебедки устанавливают на судах, предназначенных для буксировки несамоходных плавучих сооружений:
- буксирах;
- спасательных судах;
- ледоколах и т. д.
В свежую, а особенно в Подготовка к плаванию в штормовую погодуштормовую погоду, в результате воздействия волны или ветра на буксируемый воз буксирный трос испытывает резкие динамические рывки, что может привести к обрыву буксирного троса.
Для амортизации динамических рывков большинство современных буксирных лебедок оборудуют специальным устройством, которое обеспечивает автоматическое стравливание буксирного троса при рывке и последующую автоматическую выборку троса.
Буксирные автоматические лебедки выполняют с:
- паровым приводом;
- электрическим приводом;
- гидравлическим приводом.
На дизельных и дизель-электрических судах применяют электрические и гидравлические буксирные лебедки, которые, как и паровые, снабжаются автоматическим регулятором натяжения буксирного троса.
В электрических буксирных лебедках, работающих, как правило, по системе генератор-двигатель, в основном применяется импульсный метод автоматического регулирования натяжения троса. При этом лебедка снабжается специальным задающим устройством, на котором устанавливается номинальное натяжение буксирного троса.
Если усилие в буксирном тросе превысит установленное номинальное натяжение, то через механическую или гидравлическую связь в электроцепь управления посылается импульс, замыкающий контакты цепи электромагнитного тормоза. Буксирный барабан растормаживается, буксирный трос стравливается, и резкий динамический рывок исключается. При этом барабан, приводимый натяжением буксира во вращение, вращает якорь электродвигателя, заставляя его работать в тормозном, так называемом рекуперационном режиме. Рекуперируемая электроэнергия гасится дополнительными сопротивлениями, вводимыми в главную электрическую цепь.
Что такое рекуперационный режим?
Рекуперационный режим – это режим работы, при котором электрическая или гидравлическая энергия, вырабатываемая при травлении (отдаче) буксирного троса под нагрузкой, не рассеивается в виде тепла, а преобразуется и возвращается в судовую электросеть.
Как только натяжение в буксирном тросе становится меньше номинально установленного, в задающем устройстве срабатывают соответствующие контакты, обеспечивающие через цепь управления работу приводного электродвигателя в режиме выборки буксирного троса.
Рекомендуется к прочтению: Механизмы специальных судовых устройств морского флота
Электродвигатель работает на выбирание троса до тех пор, пока натяжение в тросе не станет равным номинально установленному натяжению. По достижении номинального натяжения электродвигатель останавливается, и барабан затормаживается электромагнитным тормозом. Автоматическое действие электрических буксирных лебедок обеспечивается специальными электросхемами.
Наиболее простым по конструкции и надежным в действии автоматическим растормаживающим устройством обладают гидравлические буксирные лебедки.
На рис. 5 показана развернутая кинематическая схема паровой буксирной лебедки с автоматическим приспособлением для вытравливания буксирного троса при резком возрастании нагрузки на него и подбирания троса при уменьшении нагрузки.
Лебедка приводится в действие двухцилиндровой паровой машиной, работающей без расширения пара и реверсируемой дифференциальным золотником.
Вращение машинного вала 1 через пару цилиндрических шестерен 2, 3 передается промежуточному валу 4, на котором кулачковой муфтой 5 закрепляется цилиндрическая шестерня 6. Шестерня 6, сцепляющаяся с шестерней 7, передает вращение грузовому валу 8 и закрепленному на нем барабану 9, снабженному ленточным тормозом 10. При буксировке в тихую погоду барабан застопорен ленточным тормозом, и пар на машину закрыт.
При буксировке в свежую погоду ленточный тормоз отдают, открывают пар на машину и включают автомат регулировки натяжения буксира. Автомат регулировки натяжения буксира выполняется следующим образом. На конце грузового вала, выходящем за подшипник, закрепляется коническая шестерня 11, сцепляющаяся с конической шестерней 12, свободно насаженной на валик автомата 13. Шестерня 12 закрепляется на валике при помощи кулачковой муфты 14. Валик 13 имеет нарезной участок, ввертываемый в муфту 15, лишенную вращательного движения. К муфте 15 присоединяется тяга 16, к которой крепится золотник 17, регулирующий поступление пара к дифференциальному золотнику Главные паровые машины на судахпаровой машины.
При включении автомата дифференциальный золотник ставится в положение «выбирать». При отданном ленточном тормозе, открытом запорном паровом вентиле, включенной муфте 14 и поставленном на передний ход дифференциальном золотнике лебедка готова к работе с использованием автомата.
При сильном рывке буксирного троса барабан начинает вращаться и трос стравливается; динамичность рывка снимается. Вращение грузового барабана через шестерни 7, 6, 3, 2 передается машинному валу, заставляющему через кривошипно-шатунный механизм перемещаться поршни в цилиндрах. Одновременно вращение барабана через конические шестерни 11, 12 передается валику 13, по резьбе которого начинает перемещаться муфта 15. Муфта потянет за собой регулирующий золотник 17, открывающий доступ пара к дифференциальному золотнику, направляющему пар в цилиндры машины. Давление пара на поршни противодействует движению их от натяжения буксира.
Таким образом, давление пара на поршни, передающееся через кривошипно-шатунный механизм и зубчатую передачу на грузовой вал, вызывает на нем крутящий момент, противодействующий моменту от натяжения буксирного троса.
Чем сильнее и динамичнее натяжение буксира, тем больше сместится регулирующий золотник, и большее количество пара поступит в цилиндры машины. Травление буксира будет продолжаться до тех пор, пока не наступит равновесие моментов на грузовом валу.
При ослаблении натяжения равновесие моментов на грузовом валу нарушается и барабан, получающий вращение в обратную сторону, выбирает слабину буксира. Регулирующий золотник при этом также перемещается в обратном направлении и, прикрывая доступ пара в машину, уменьшает создаваемый ею крутящий момент до состояния равновесия, при котором машина вновь останавливается. Чтобы подтянуть буксируемое судно, необходимо отключить муфту 14 и с помощью маховичка 18 вывести регулирующий золотник на полное открытие.
Читайте также: Подъемно-транспортные механизмы, применяемые на судах морского флота
Свежий пар в коробку дифференциального золотника можно пустить и помимо регулирующего золотника – через предусмотренный для этой цели обводной патрубок. Для равномерной укладки троса по длине барабана лебедка снабжается механическим тросоукладчиком. Тросоукладчик состоит из валика 19, на котором имеются ленточные резьбы левого и правого направления. Валик 19 получает вращение от грузового вала через конические шестерни и червячную пару. На концах валика резьбы сходятся одна с другой по плавному закруглению определенного радиуса. Каретка 20 тросоукладчика совершает возвратно-поступательное движение по направляющим штангам 21, двигаясь под действием вращающегося винта на поводок каретки. Необходимая перемена направления движения каретки происходит в результате перехода поводка по закруглению с одной резьбы на другую.
На рис. 6 показана гидравлическая автоматическая буксирная лебедка.
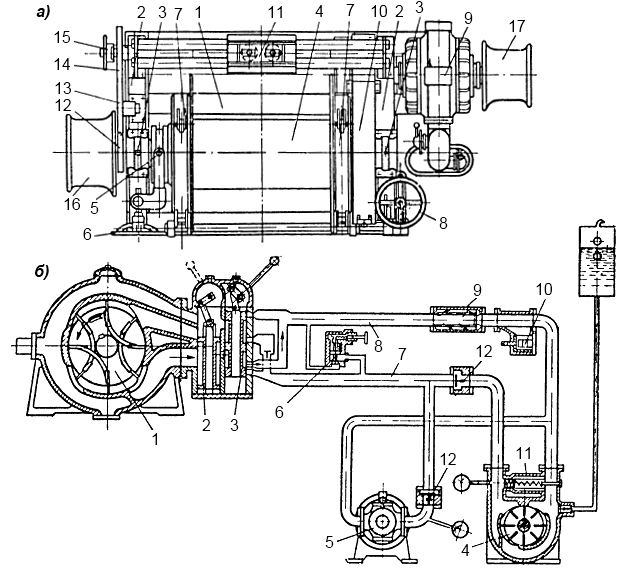
а – вид сверху; б – схема
Для исполнительного двигателя гидравлической буксирной лебедки (рис. 6, б) используется типовой двухступенчатый гидромотор 1 с золотником 2 для ступенчатого изменения скорости и тяги и золотником 3 для изменения направления вращения барабана.
В отличие от гидравлических приводов обычных лебедок гидропривод автоматической буксирной лебедки, кроме основного насоса 4, имеет вспомогательный насос 5 и дроссельный клапан 6, через который при автоматической работе нагнетательный 7 и всасывающий 8 трубопроводы могут сообщаться между собой.
На Расчет элементов систем трубопроводов на судневсасывающем трубопроводе монтируется обычный грязевой фильтр 9 и магнитный фильтр 10, а нагнетательный трубопровод снабжен предохранительным клапаном 11 и невозвратными клапанами 12.
Основной насос 4 служит для подтягивания воза, стравливания или выбирания буксирного троса на значительную длину и выключается при буксировке на режиме автоматического регулирования постоянного натяжения в тросе.
Для обеспечения работы гидравлической буксирной лебедки в автоматическом режиме необходимо золотник 3 поставить в положение «выбирать», дроссельный клапан 6 по указательной шкале поставить на номинальное натяжение, пустить вспомогательный насос 5 и отдать ленточные тормоза на барабане буксирной лебедки. В этом случае вспомогательный насос 5 создает в нагнетательном трубопроводе, а, следовательно, и в полостях гидродвигателя давление, действующее на лопатки ротора гидродвигателя и создающее крутящий момент, уравновешивающий момент на барабане от натяжения буксира.
Масло, нагнетаемое насосом 5, из нагнетательного трубопровода через дроссельный клапан 6 перетекает под давлением во всасывающий трубопровод. При рывке на буксирном тросе ротор гидромотора начинает вращаться, стравливая буксир, и гидродвигатель переходит в режим насоса.
Давление в нагнетательной полости при этом возрастает, и в результате увеличения давления дроссельный клапан открывается на большую величину, пропуская как масло, нагнетаемое насосом 5, так и масло, подаваемое в нагнетательный трубопровод гидродвигателем в процессе работы его в режиме насоса.
Как только давление в гидродвигателе, а, следовательно, и в нагнетательном трубопроводе станет ниже номинального, дроссельный клапан автоматически закрывается, масло, нагнетаемое насосом 5, поступает к лопаткам ротора и, действуя на них, заставляет ротор вращаться в направлении выборки буксирного троса.
По мере выборки троса давление в нагнетательной полости возрастает и при достижении номинального установочного давления наступает равновесие моментов на барабане и лебедка останавливается в этом равновесном состоянии.
Гидравлическая буксирная лебёдка (рис. 6, а) смонтирована на общей Установка и центровка фундаментной рамыфундаментной раме 1 с двумя массивными станинами 2 для подшипников 3 вала лебедки. Барабан 4 закрепляется на валу при помощи муфты 5, перемещаемой вращением маховика 6.
Барабан снабжается двумя ленточными тормозами 7, затягиваемыми одновременно от маховика 8. Вращение от гидродвигателя 9 передается барабану через пару цилиндрических шестерен, помещенных в кожухе 10.
Лебедка оборудована винтовым тросоукладчиком 11, винт которого через шестерни 12, 13, 14 приводится от вала барабана. Муфта 15 позволяет отключать тросоукладчик при работе с турачками 16, 17 и отключенном тросовом барабане.

- Аристов Ю. К. Судовые вспомогательные механизмы. М., Речной транспорт. М., 1963.
- Арцыков А. П., Воронов В. Ф. Судовые вспомогательные механизмы. Л., Судпромгиз, 1963.
- Башта Т. М. Машиностроительная гидравлика. М., ГНТИМЛ, 1963.
- Богомольный А. Е. Судовые вспомогательные и рыбопромысловые механизмы. Л., Судостроение, 1971.
- Валдаев М. М. Гидравлические приводы судовых палубных механизмов. Л., Судостроение, 1973.
- Власьев Б. А., Резчик Ю. И. Судовые вспомогательные механизмы. Л., Судостроение, 1979.
- Жаров В., Жеребенков Ю., Кадильников Ю., Кузнецов В. Тунцы и их промысел в Атлантическом океане. Калининградское книжное издательство, 1964.
- Завиша В. В. Гидравлические рулевые машины. Изд-во Транспорт, 1965.
- Коваленко В. Ф., Лукин Г. Я., Рогалев В. М. Водоопреснительные установки морских судов. Изд-во Транспорт, 1964.
- Колесников О. Г. Судовые вспомогательные механизмы и холодильные установки. М., Транспорт, 1964.
- Лукин Г. Я., Колесник Н. Н. Опреснительные установки промыслового флота. М., Пищевая промышленность, 1970.
- Попов Р. И. Судовые вспомогательные механизмы. М., Пищевая промышленность, 1970.
- Российский морской регистр судоходства, Санкт-Петербург, 2017.
- Терентьев А. В., Миллер Б. Н., Чернигин Н. Ф. Гидравлическая механизация в рыбной промышленности. Пищепромиздат, 1956.
- Торбан С. С. Судовые и береговые промысловые установки и механизмы. М., Пищевая промышленность, 1972.
- Торбан С. С. Комплексная механизация дрифтерного лова рыбы. М., Пищевая промышленность, 1966.
- Шмаков М. Г. Судовые устройства. М., Транспорт, 1971.
- Шмаков М. Г., Климов А. С. Якорные и швартовные устройства. Л., Судостроение, 1964.
- Юткевич Р. М., Савин К. А., Волегов В. А. Судовые сепараторы топлива и масла. Л., Судостроение, 1967.





