Для судового штурмана руль – это просто рукоятка авторулевого или джойстик на мостике. Для механиков же рулевое устройство на судах – это огромная ответственность, скрытая под кормовым подзором и в замкнутом пространстве румпельного отделения. Это система, где чистая гидродинамика встречается с мощью гидравлики, и малейший отказ здесь превращает судно из управляемого транспорта в неуправляемую стальную громаду.
- Назначение и основные элементы рулевого устройства
- Действие руля на судно
- Требования, предъявляемые к рулевым устройствам
- Типы рулей, определение их размеров и выбор профиля
- Гидродинамические силы и моменты, действующие на изолированный руль
- Влияние свободной поверхности воды, корпуса и гребного винта на работу руля
- Поворотные направляющие насадки
- Рулевые приводы
В повседневной работе судовым механикам приходится иметь дело с огромными нагрузками: ударами волн, вибрацией от винта и колоссальным давлением в системе привода. Понимание того, как распределяются гидродинамические силы на пере руля и почему в определенный момент «закипает» масло в гидроцилиндрах, – это не просто теоретические знания, а залог того, что можно предотвратить поломку до того, как она станет критической. В данном материале мы разберем рулевое устройство «по косточкам» с инженерной точки зрения:
- рассмотрим конструктив и «скелет» системы: от баллера и пера до упорных подшипников;
- разберем, почему выбор профиля руля напрямую влияет на ресурс привода;
- проанализируем физику процесса: как соседство с гребным винтом и корпусом меняет работу устройства.
- уделим особое внимание сердцу системы – рулевому приводу, его надежности и тем требованиям, которые предъявляет к нам Регистр.
Грамотная эксплуатация начинается с понимания того, как работает каждый узел. И если механик понимает физику сил, действующих на перо руля в воде, он всегда сможет обеспечить живучесть судна в любой штормовой ситуации.
Назначение и основные элементы рулевого устройства
Рулевое устройство и авторулевой системы управления судномРулевое устройство обеспечивает управляемость судна, т. е. оно позволяет удерживать судно на курсе или изменять направление движения, несмотря на воздействие ветра, течения и волн. Этим устройством оборудуют все самоходные суда.
В качестве рулевых (исполнительных) органов используют рули или поворотные насадки. На некоторых судах эти исполнительные органы действуют совместно с:
- гребными винтами;
- водометными движителями;
- подруливающим устройством и др.
Рулевое устройство состоит из:
- руля или поворотной насадки;
- рулевого привода;
- рулевой машины;
- дистанционной передачи.
Современные судовые системы управления включают в себя комплекс механизмов, обеспечивающих маневренность объекта. Руль или поворотная насадка непосредственно обеспечивает управляемость судна. Рулевой привод служит для передачи усилия от рулевой машины к баллеру руля или поворотной насадке. Рулевая машина является агрегатом, с помощью которого перекладывают рули (поворотные насадки) на требуемый угол от диаметральной плоскости или удерживают их в нужном положении. Дистанционная передача (механическая, электрическая, гидравлическая) позволяет управлять рулевой машиной с поста управления судном при помощи штурвала. Положение пера руля относительно диаметральной плоскости судна фиксируется специальным прибором – аксиометром. Часто при перечислении основных элементов рулевого устройства указывают не руль как таковой, а его составные части:
- перо,
- баллер,
- подшипники баллера,
- замок, соединяющий перо руля с баллером.
Общее представление о рулевом устройстве дает схема, показанная на рис. 1.
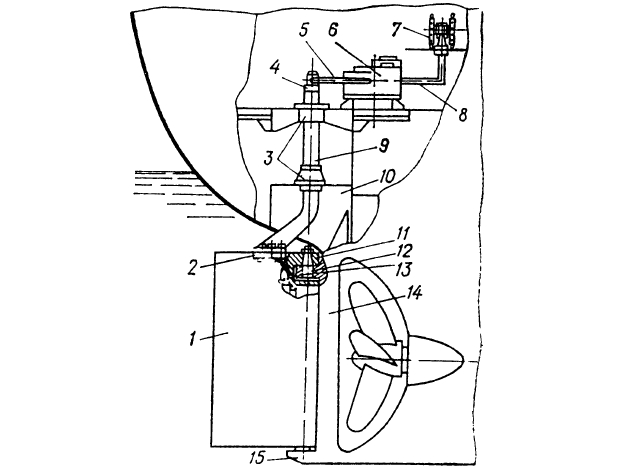
Перо руля 1 при помощи фланца 2 соединено с баллером 9, имеющим опоры 3, способные принять на себя как массы баллера и пера руля, так и горизонтальные силы, возникающие при перекладке руля. На голове 4 баллера закреплен рулевой привод 5, связанный с рулевой машиной 6. Нижняя часть баллера, соединяемая с пером руля, выходит из корпуса через гельмпортовую трубу 10. При помощи штурвала ручного управления 7 и передачи 8 осуществляется команда рулевой машине, воздействующей на рулевой привод, поворачивающий руль.
Помимо соединения с баллером, перо руля закрепляют на элементах конструкции кормовой части.
На рис. 1 основными элементами крепления являются:
- петли 11 пера руля;
- штырь 12;
- петля 13 рудерпоста 14.
Цифрой 15 обозначена пятка ахтерштевня.
Рулевые машины – классификация и особенности эксплуатации на морских судахРулевые машины в зависимости от рода используемой энергии делятся на:
- электрические,
- гидравлические,
- ручные.
Электрические рулевые машины часто называют электромеханическими, поскольку они состоят из механических элементов. В качестве двигателя гидравлических рулевых машин обычно используется электродвигатель, вследствие чего такие машины называются электрогидравлическими. Электродвигатель приводит в действие насос, подающий рабочую жидкость в исполнительную часть гидравлического рулевого привода. Эта часть привода обеспечивает перекладку руля в ту или иную сторону в зависимости от направления подачи жидкости, которое изменяется по желанию судоводителя с помощью особой пускорегулирующей аппаратуры. Некоторые суда имеют гидравлические рулевые машины с насосом, приводимым в действие от главного двигателя.
Ручные рулевые машины выполняют:
- механическими,
- гидравлическими.
Область применения этих машин ограничивается сравнительно небольшими судами, где для перекладки рулевого органа достаточно усилия, развиваемого одним человеком (штурвальным).
Действие руля на судно
Руль (поворотная насадка), установленный на судне, должен обеспечивать его управляемость в любых условиях эксплуатации. Под управляемостью понимают два основных качества судна:
- поворотливость,
- устойчивость на курсе.
Поворотливостью называют способность судна подчиняться действию руля, а устойчивостью на курсе – способность сохранять избранное (заданное) направление при неизменном положении руля (или минимальном его воздействии).
Некоторое представление о действии руля на судно дает рис. 2.
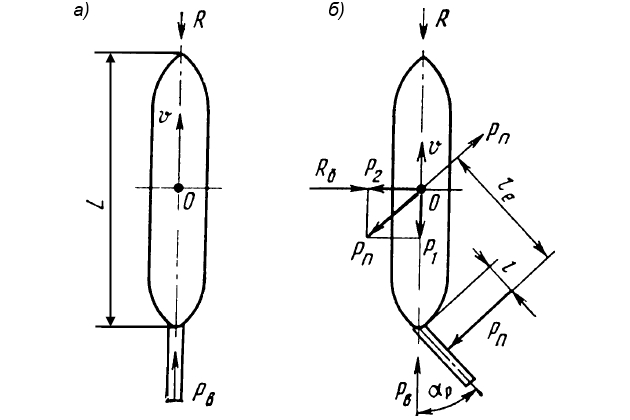
На прямом курсе на Корпус судна и предъявляемые к нему требованиякорпус судна действует сопротивление R воды его движению со скоростью v, которое преодолевается работой движителя, создающего силу упора Pв (рис. 2, а). Когда начинается действие руля на судно в начальный момент маневра, при повороте руля (насадки) на некоторый угол αр (рис. 2, б) на руль начинает действовать набегающий поток, в результате чего возникает сила гидродинамического давления воды на руль. Составляющую этой силы, действующую по нормали к поверхности пера руля, обозначим Pп. Точка приложения гидродинамических сил называется центром давления (ЦД). Ее положение зависит от угла поворота руля.
Действие силы Pп согласно законам механики можно заменить действием пары сил Pп с плечом lс, создающей момент:
и еще одной силой Pп, приложенной в центре тяжести (ЦТ) судна O. Пара сил заставляет судно отклониться от прямолинейного курса (судно начинает разворачиваться), а сила Pп своей составляющей:
увеличивает сопротивление воды движению судна (проявляется тормозящее действие руля), а другой своей составляющей:
вызывает дрейф судна в сторону, противоположную направлению перекладки руля. Эта составляющая создает боковую силу Rб сопротивления воды движению судна. Таким образом, перекладка рулевого органа вызывает не только изменение курса судна, но и его торможение и дрейф.
Рекомендуется к прочтению: Рулевые устройства судна. Дефектация и ремонт
Центр тяжести (ЦТ) судна находится приблизительно на середине его длины L, поэтому для плеча пары сил можно написать выражение:
где:
- l – расстояние от оси вращения руля до центра давления воды на руль.
Следовательно:
Так как расстояние lс по отношению к L/2 мало, то им обычно пренебрегают. Тогда:
На рис. 3 показано движение судна при отклоненном вправо руле.
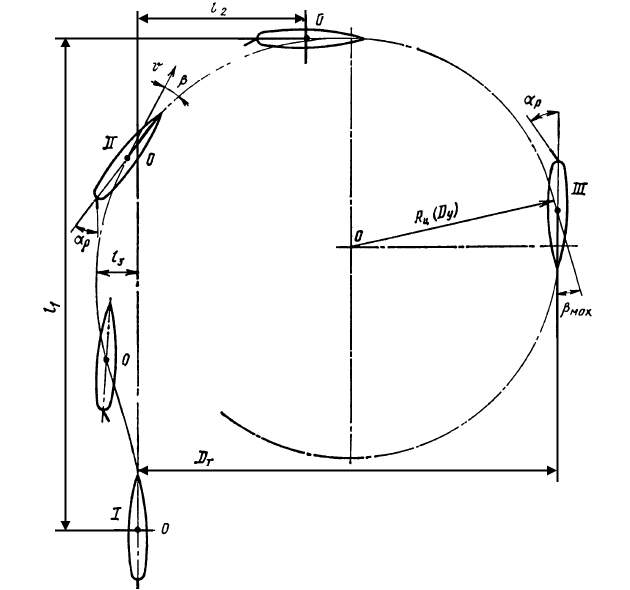
Как видно в начале маневра, ЦТ судна перемещается несколько влево, т. е. в сторону, противоположную перекладке руля, а затем вправо. Если отклоненный руль удерживать с постоянным углом αр, то ЦТ судна O будет двигаться по некоторой криволинейной траектории, называемой циркуляцией.
Угол β, образованный между вектором скорости v центра тяжести судна и его ДП, называется углом дрейфа судна. Когда наступает установившееся движение, угол дрейфа достигает своего максимального значения βmax и кривая циркуляции переходит в окружность радиуса Rц. Диаметр Dц этой окружности носит название диаметра установившейся циркуляции. Расстояние Dт от первоначального прямолинейного Движение судна постоянным курсом при изменении режимов работы движителейкурса судна до точки, в которой завершается его поворот на 180°, есть тактический диаметр циркуляции. На рис. 3 обозначены:
- l1 – выдвиг;
- l2 – прямое смещение;
- l3 – обратное смещение судна.
Угол дрейфа обычно не превышает 8-20°. Он считается положительным, если вектор скорости направлен наружу от центра циркуляции, и отрицательным, если вектор скорости направлен внутрь центра циркуляции.
Циркуляцию судна делят на 3 периода:
- маневренный,
- эволюционный,
- установившийся.
Маневренный период циркуляции (участок I-II) определяется началом и концом перекладки руля. Этот период при максимальном угле отклонения руля продолжается 12-15 с. Эволюционный период циркуляции (участок II-III) начинается с момента окончания перекладки руля и заканчивается, когда угол дрейфа β становится максимальным, а радиус циркуляции Rц минимальным (в конце этого периода все параметры движения принимают установившийся характер). Период установившейся циркуляции судна наступает вслед за эволюционным и продолжается до тех пор, пока не изменится положение руля.
С уменьшением размеров Dц и Dт улучшается управляемость судна. Поворотливость судна считается удовлетворительной:
- для речных пассажирских и грузовых судов, если:
- для транспортных судов, толкачей и буксиров, оборудованных поворотными насадками, если:
- для транспортных судов смешанного плавания – когда:
Поворотливость судна может быть оценена также угловой скоростью поворота судна на чистой воде, которая для речных судов составляет 130-290 град/мин; для судов смешанного плавания – 90-130 град/мин.
Важным показателем управляемости служит также относительный период преодоления инерции при движении судна. Этот критерий представляет собой отношение времени от начала перекладки руля до начала поворота судна к времени перекладки руля из нулевого положения на борт.
Требования, предъявляемые к рулевым устройствам
Из всех Судовые устройства, эксплуатация и принцип работысудовых устройств рулевое является наиболее нагруженным, так как оно работает постоянно во время хода судна. По этой причине рулевое устройство для всех судов классов «М-СП», «М», «О», «Р» и «Л» должно отличаться надежностью и долговечностью. Кроме того, оно должно обладать небольшими габаритными размерами и массой, а также быть экономичным.
По Правилам Речного Регистра РФ рулевое устройство судна должно иметь 2 привода:
- основной,
- запасный,
причем основной рулевой привод должен быть, как правило, механическим. Основной рулевой привод должен обеспечивать при полной скорости переднего хода перекладку руля (поворотной насадки) на угол от 35° одного борта до 35° другого борта за время не более 30 с. Основной привод может быть ручным, если указанные углы и время перекладки руля и поворотной насадки обеспечиваются одним человеком при усилии на рукоятке штурвала не более 118 Н и частоте вращения штурвала не более 25 об/мин за одну полную перекладку.
Запасный рулевой привод должен обеспечивать перекладку руля и поворотной насадки с борта на борт при скорости переднего хода судна, равной 60 % наибольшей. При этом, время перекладки на угол от 20° одного борта до 20° другого борта не должно превышать 60 с. Запасный рулевой привод может быть ручным, если приведенные требования выполняются при усилии на рукоятке штурвала не более 157 Н на одного работающего и частоте вращения штурвала не более 25 об/мин за одну полную перекладку. Переход с основного рулевого привода на запасный должен осуществляться по возможности немедленно, но не более чем за 10 с. Запасный рулевой привод должен быть независимым от основного и по возможности воздействовать непосредственно на баллер руля.
В рулевых устройствах должны быть ограничители поворота руля и поворотной насадки. На судах классов «М» и «О» для исключения произвольного поворачивания руля и поворотной насадки, отсоединенных от рулевой машины, должно быть установлено фиксирующее устройство.
Руль следует размещать под корпусом судна так, чтобы можно было легко снять его для ремонта и выполнять монтажные работы. Расположение руля и поворотной насадки должно исключать возможность их повреждения, вследствие удара о грунт при плавании судна с наибольшим расчетным дифферентом на корму.
Требования к рулевым устройствам морских судов содержатся в Правилах Регистра РФ. Согласно правилам перекладка руля или насадки должна осуществляться основным приводом при максимальной скорости хода судна с 35° одного борта на 30° другого борта за время не более 28 с. При действии запасного рулевого привода рулевое устройство должно обеспечивать перекладку руля с 20° одного борта на 20° другого борта при скорости переднего хода, равной половине максимальной скорости судна, но не менее 7 уз за время не более 60 с. В остальном общие требования к рулевым устройствам морских судов и судов внутреннего плавания мало чем отличаются между собой. Существенное отличие состоит в определении прочных размеров деталей рулевого устройства, что в Правилах Регистра РФ представлено более полно.
Типы рулей, определение их размеров и выбор профиля
В данном пункте представлена методика выбора профиля пера руля для морского судна, а также рассмотрены основы расчета параметров рулей. Применяемые на судах рули могут быть разделены на три группы:
- небалансирные (простые),
- балансирные,
- полубалансирные.
У небалансирных рулей (рис. 4, а) ось вращения практически совпадает с передней кромкой пера.
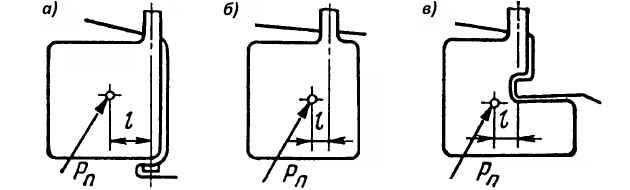
У балансирных рулей (рис. 4, б) часть площади пера руля располагается перед осью вращения; эта часть площади руля называется балансирной. Полубалансирный руль имеет балансирную часть пера не по всей высоте (рис. 4, в).
Преимущество балансирных и полубалансирных рулей заключается в том, что у них (см. соответственно рис. 4, б и 4, в) центр давления расположен ближе к оси вращения, чем у рулей небалансирных, следовательно, и момент, создаваемый силой Pп,
где:
- l – плечо этой силы, будет меньше.
Это в свою очередь означает, что для перекладки балансирного и полубалансирного рулей потребуется меньшая мощность рулевой машины. На практике находят применение рули всех трех групп.
Отношение площади Fб балансирной части ко всей площади F пера руля называется коэффициентом компенсации:
В зависимости от формы контура пера рули делят на:
- прямоугольные,
- трапециевидные,
- криволинейные.
Форма контура пера определяется очертанием кормовых обводов судна. Она зависит также от расположения Гребные винты малотоннажных судовгребных винтов.
По способу крепления к корпусу судна различают рули:
- навесные (простые);
- подвесные (см. рис. 4, б);
- полуподвесные (см. рис. 4, а, в).
По форме профиля рули делят на:
- плоские (пластинчатые);
- профилированные (обтекаемые).
Наибольшее распространение получили профилированные рули, так как они имеют большую гидродинамическую эффективность. Плоские рули используют лишь на отдельных несамоходных баржах.
Вращающий момент, обеспечивающий поворот судна, и сила Pп (см. рис. 2) находятся в прямой зависимости от площади пера руля F, которая зависит от типа судна и его назначения. Суммарная площадь всех рулей, м2:
где:
- μ0 – коэффициент, зависящий от назначения судна, количества гребных винтов, скорости и других факторов;
- L – длина судна между перпендикулярами, м;
- T – наибольшая осадка судна, м.
Коэффициент определяют на основании обработки статистических данных. Значения коэффициента μ0 указаны ниже:
| Морские грузовые и пассажирские суда | 0,015-0,023 |
| Грузо-пассажирские суда внутреннего плавания | 0,04-0,05 |
| Речные грузовые суда | 0,035-0,04 |
| Речные буксиры | 0,06-0,07 |
| Толкачи | 0,10-0,15 |
| Суда-катамараны | 0,055-0,07 |
Для судов, работающих в узкостях (каналах), и для судов, руль которых не работает в потоке гребного винта, площадь пера руля, вычисленную по формуле 3, увеличивают на 20 %.
В зависимости от числа гребных винтов, ширины судна и других факторов выбирают число рулей zр. Наиболее эффективно руль работает в том случае, когда он расположен за гребным винтом (см. рис. 1), так как поток воды, отбрасываемый винтом, увеличивает давление воды на руль. Обычно число рулей на судне принимают равным числу гребных винтов и располагают их за винтами.
Площадь одного руля:
По известной площади руля определяют его размеры (рис. 5).
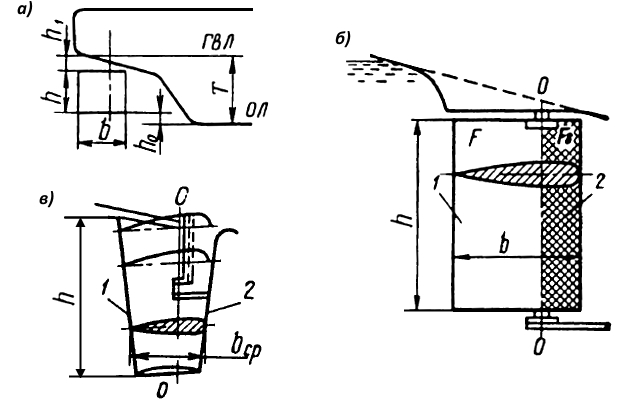
а – схема установки руля; б – балансирный руль; в – полубалансирный руль;
1 – передняя кромка; 2 – задняя кромка
Ось баллера обозначена 0-0. Высоту руля h принимают из условия, что он должен быть по возможности выше и уже. Чем больше высота руля и меньше ширина его (длина), тем меньше плечо силы давления воды на руль, момент на баллере и необходимая мощность рулевой машины. Высоту руля назначают в зависимости от класса судна и конструкции его кормовой части. Значение h руля (рис. 5, а) можно оценить по формуле:
где:
- h1 – положение верхней кромки руля относительно уровня воды (-h1 – минимальное погружение; +h1 – максимальное возвышение);
- h2 – минимальное расстояние между нижней кромкой руля и килевой линией.
У судов классов «М» и «О» руль должен быть полностью погружен в воду. Это необходимо для защиты его от ударов волн. Для судов класса «М» погружение верхней кромки руля h1 ⩾ 0,25h, а для судов класса «О» h1 ⩾ 0,125h. Тогда формулу 4 можно записать в следующем виде:
- для судов класса «М»:
- для судов класса «O»:
Для судов классов «Р» и «Л» значение h1 в формуле 4 может быть принято со знаком «плюс» и равным 0,15-0,35 м, т. е. у речных судов верхняя кромка руля может возвышаться над уровнем воды. Нижняя кромка руля должна всегда возвышаться над килевой линией, что исключает возможность касания рулем грунта и его поломки. Значение h2 поэтому принимают в пределах 0,05-0,25 м в зависимости от Выбор оптимального дифферента для маневрирования суднадифферента судна на корму. Ширина пера руля b зависит от его очертания. Для рулей прямоугольной формы b = F/h у рулей непрямоугольной формы за расчетную ширину принимают среднее ее значение на уровне центра тяжести площади bср = F/h.
Важной характеристикой руля является относительное удлинение λ. Для прямоугольного руля λ = h/b. Если руль непрямоугольный, то:
Судовые рули имеют относительное удлинение λ = 0,5-3,0. Чем больше λ, тем лучше гидродинамические характеристики руля и поворотливость судна. На речных судах вследствие ограниченной осадки λ обычно не превышают 1,5, а на мелкосидящих судах меньше 0,5.
Коэффициент компенсации:
При больших значениях kк руль оказывается неустойчивым. Руль считается устойчивым, если он сам под давлением воды возвращается в диаметральную плоскость.
При выборе типа руля следует отдавать предпочтение балансирным и полубалансирным рулям, так как на их перекладку затрачивается меньшая мощность, чем на перекладку небалансирных рулей. При плавании в ледовых условиях, а также в случае засоренного фарватера, как правило, устанавливают небалансирные рули.
Читайте также: Механизмы рулевого устройства на морских судах
На рис. 5, б, в показано сечение руля горизонтальной плоскостью, перпендикулярной к оси баллера. Контур этого сечения представляет собой профиль руля. Его выбирают из числа профилей, применяемых в судостроении. Расстояние между крайними точками по длине профиля называется хордой профиля. Длина хорды в данном сечении равна ширине пера. Профили рулей создают на основании их исследования в аэродинамических трубах или в опытных бассейнах, причем исследуются только симметричные профили.
Геометрическая форма и профиль пера руля (рис. 6) описываются через ординату t профиля и параметр относительной толщины .
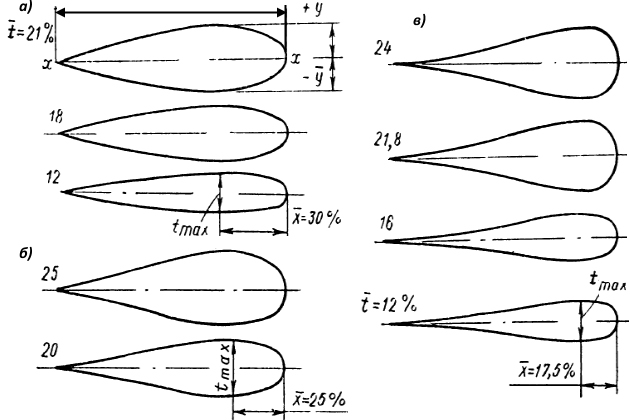
а – NASA; б – НЕЖ; в – ЦАГИ
Ординатой профиля t называется расстояние между двумя точками, измеренное в направлении, перпендикулярном хорде профиля. Наибольшая ордината является его максимальной толщиной tmax.
Отношение этой толщины к длине хорды называется относительной толщиной профиля, т. е.:
Все существующие профили разделяют на:
- тонкие ;
- средние ;
- толстые .
В практике проектирования рулей пользуются относительной толщиной профиля , так как при большей относительной толщине может происходить срыв потока при сравнительно малых углах перекладки руля.
Наилучшими для рулей являются профили:
- типа НЕЖ, получаемые построением по формуле Н. Е. Жуковского;
- типа ЦАГИ (Центрального аэрогидродинамического института);
- типа НАСА (Национального консультативного комитета по аэронавтике США).
Геометрия профиля обычно задается в виде табличных данных.
На рис. 7 приведены относительные ординаты профилей (см. рис. 6) в зависимости от относительного отстояния от передней кромки.
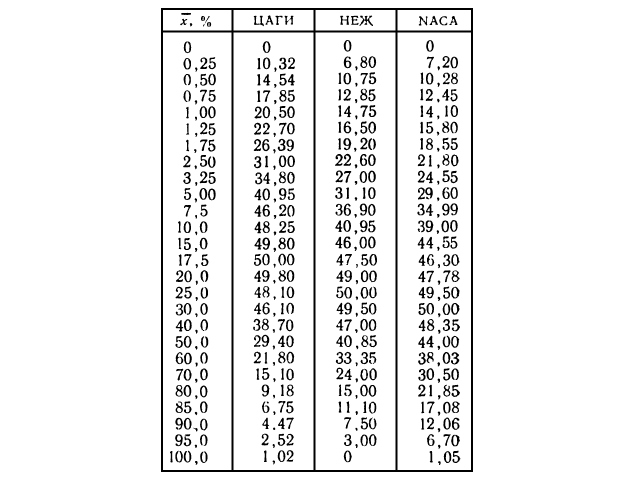
Размеры относительных ординат, взятых из этой таблицы для различных значений , откладывают от хорды профиля в обе стороны.
Профили типа НЕЖ применяют для рулей быстроходных судов, профили типа НАСА – для рулей, расположенных за гребными винтами судов, имеющих умеренную скорость, профили типа ЦАГИ – при двухвальной установке с одним рулем, расположенным в диаметральной плоскости.
Гидродинамические силы и моменты, действующие на изолированный руль
Под изолированным рулем понимают руль в свободном потоке. Водяной поток, набегающий на переложенный руль, образует с плоскостью руля или хордой профиля угол α, называемый углом атаки. На руль, установленный к вектору скорости v набегающего потока под некоторым углом атаки α, будет действовать гидродинамическая сила P, расположенная в горизонтальной плоскости и приложенная в центре давления (рис. 8).
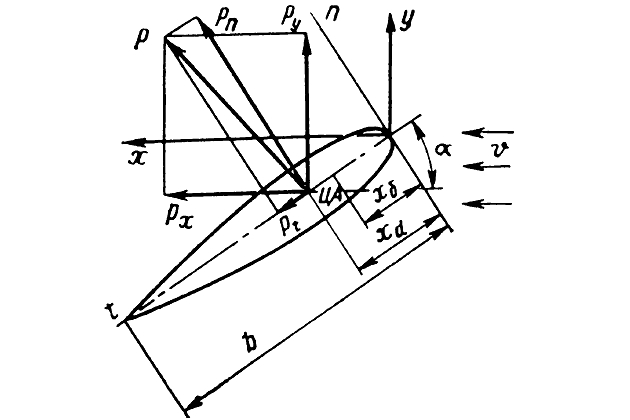
Разложив эту силу по поточным осям координат x-y, найдем подъемную силу Py направленную перпендикулярно к направлению скорости водяного потока, силу лобового сопротивления Px, параллельную скорости. Кроме того, для многих практических приложений силу P дополнительно раскладывают по связанным осям координат t-n:
- на нормальную силу Pn перпендикулярную к хорде профиля руля;
- на касательную силу Pt направленную вдоль хорды профиля.
Все указанные силы на пере руля определяются следующими выражениями:
1 Подъемная сила:
коэффициент подъемной силы руля:
где:
- ρ – плотность воды, кг/м3;
- v – скорость набегающего на руль потока, м/с.
2 Сила лобового сопротивления:
коэффициент лобового сопротивления:
3 Нормальная сила:
коэффициент нормальной силы:
или
4 Касательная сила:
5 Момент всех сил, действующих на перо относительно передней кромки руля:
где:
- xd – отстояние центра давления (ЦД) от передней кромки руля.
Этот же момент в коэффициентном написании:
где:
- cm – коэффициент момента относительно передней кромки руля;
Момент сил относительно оси баллера:
где:
- xб – отстояние оси баллера от передней кромки руля.
В коэффициентном написании:
откуда коэффициент момента на баллере руля:
или окончательно:
Коэффициент центра давления:
или, учитывая формулы 9, 12 и 13:
Из формул 18 и 19 следует:
Коэффициенты сил и моментов, определяемые формулами 6, 8, 10, 14 и 18, зависят от формы профиля, угла атаки и относительного удлинения.
Характер изменения этих коэффициентов в функции от угла атаки α можно проследить по графику коэффициентов руля (рис. 9).
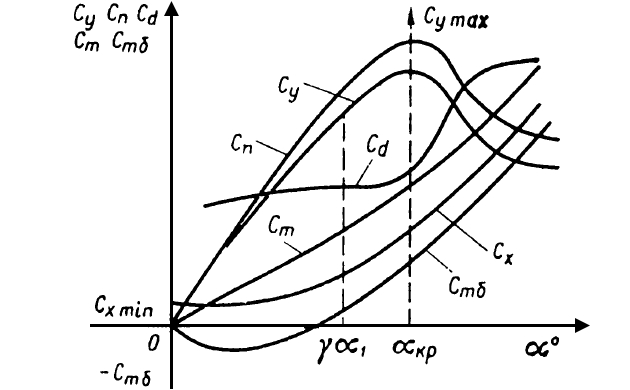
Коэффициент подъемной силы Cy при увеличении угла атаки от 0 до некоторого значения α1 изменяется примерно по линейному закону. При дальнейшем увеличении угла атаки коэффициент Cy продолжает расти, но зависимость становится нелинейной вследствие появления срывов потока, причем он сначала достигает своего максимума:
а затем начинает резко падать. Угол атаки, при котором:
называют критическим углом атаки и обозначают αкр.
Коэффициент нормальной силы Cn изменяется аналогично коэффициенту подъемной силы и кривая его на графике располагается несколько выше кривой коэффициента cy.
Коэффициент лобового сопротивления Cx с увеличением угла атаки растет. При α = 0 коэффициент лобового сопротивления руля принимает минимальное значение:
т. е. непереложенный руль оказывает минимальное сопротивление. Наиболее интенсивно коэффициент cx растет при α > αкр.
Коэффициент центра давления cd до α < αкр изменяется плавно, а после αкр резко увеличивается. На значении этого коэффициента существенно сказывается форма профиля.
Коэффициент момента cm б (относительно оси баллера) с увеличением угла атаки α претерпевает изменения. Если степень компенсации kк достаточно велика, то при малых углах α коэффициент cm б будет иметь отрицательные значения и его кривая на графике расположится ниже оси абсцисс. Угол атаки, при котором cm б = 0, называется углом перекомпенсации γ = 15-20°. При этом угле ЦД лежит на оси вращения. При дальнейшем увеличении угла атаки коэффициент cm б принимает положительные значения, и его кривая растет плавно до α = αкр, после которого она резко поднимается вверх.
На графике гидродинамических коэффициентов руля (см. рис. 9) можно отметить два режима работы руля:
- первый докритический режим при углах атаки от 0 до αкр характеризуется плавным изменением всех коэффициентов руля;
- второй режим – закритический – после αкр отличается уменьшением силы на пере руля (cy падает) и резким возрастанием момента на баллере.
Работа руля в закритическом режиме является крайне невыгодной и необходимо принимать все меры, чтобы руль не попал в эти условия. Отсюда максимальный угол перекладки руля не должен быть больше критического угла атаки αmax ⩽ αкр.
Предлагается к прочтению: Электрогидравлические рулевые машины – конструкция и расчет параметров
Все изложенное относилось к работе руля на переднем ходу, на заднем ходу обтекание профиля руля со стороны острой кромки вносит свои особенности в гидродинамические характеристики руля. Прежде всего, следует отметить положение центра давления, которое для заднего хода значительно сдвигается в корму от оси баллера. Кривая cm б располагается ниже оси абсцисс (значения cm б отрицательные) и изменяется в функции от угла атаки примерно по линейному закону. Критический угол атаки, а также значение cy max для одного и того же руля на заднем ходу меньше, чем на переднем. В целом все гидродинамические характеристики руля на заднем ходу ухудшаются.
Все коэффициенты силы и моментов ввиду их сложной зависимости от ряда факторов при расчете руля принимают по результатам продувки профилей в аэродинамических трубах. Экспериментальные данные для разных типов профилей в виде графиков и таблиц приводятся в специальных атласах и различных справочных пособиях. Они даются для переднего и заднего хода судна при различных значениях λ.
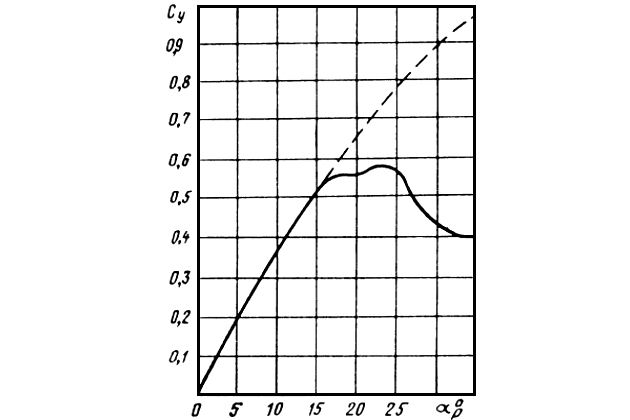
Следует отметить, что вследствие турбулизации потока за корпусом судна срыв на руле соответствует углам перекладки большим, чем указано в атласах. Поэтому при использовании графиков cy = f(α), приведенных в атласах, значение cy при срывных углах атаки следует снимать не непосредственно с экспериментальных кривых, а с продолжения кривой cy в сторону больших углов без учета срыва потока. Пример такой экстраполяции приведен на рис. 10, на котором сплошной линией показана кривая cy после срыва потока, а пунктирной – результат экстраполяции.
При отсутствии графиков для определения необходимых коэффициентов последние можно определить с помощью приближенных аналитических зависимостей. Так, для определения коэффициента подъемной силы cy может быть использована формула Прандтля:
а для нахождения cn – зависимость:
Коэффициент центра давления cd приближенно можно вычислить по выражению:
где:
- cd0 – коэффициент, зависящий от формы профиля и его максимальной толщины. При значение cd0 = 0,16, и при , cd0 = 0,2.
Значение xб в формуле 15 для момента на баллере может быть выражено через коэффициент компенсации:
При необходимости приближенные формулы 21, 22 и 23 могут быть использованы при расчете cy з, cn з и cd з для заднего хода судна. При этом по формуле 23 определяют коэффициент центра давления, характеризующий отстояние силы от задней кромки. Точность расчета коэффициентов для заднего хода ниже, чем для переднего, вследствие возможного срыва потока на острой кромке руля при небольших углах атаки.
Момент на баллере при движении задним ходом:
где:
- , причем для небалансированного руля .
Влияние свободной поверхности воды, корпуса и гребного винта на работу руля
В пункте «Гидродинамические силы и моменты, действующие на изолированный руль» были приведены зависимости для изолированных рулей. В реальных условиях на работу рулей оказывают влияние:
- уровень свободной поверхности воды;
- корпус;
- гребные винты.
Влияние свободной поверхности воды на погруженные рули мало и его обычно не учитывают, а учитывают лишь для речных судов классов «Р» и «Л», у которых верхняя кромка руля может совпадать со свободной поверхностью или возвышаться над ней. С этой целью определяют эффективное относительное удлинение руля:
где:
- ε – поправка к истинному относительному удлинению.
По значению λэф определяют гидродинамические коэффициенты руля.
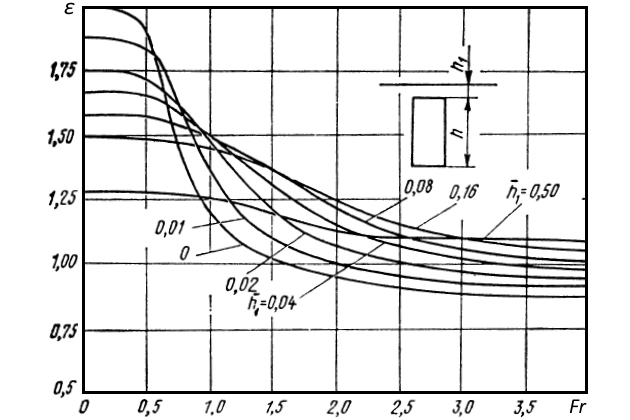
Поправка ε зависит от числа Фруда Fr и относительного зазора , который представляет собой отношение зазора h1 между верхним торцом руля и свободной поверхностью воды к высоте руля h (рис. 11), т. е.:
Число Фруда:
где:
- v – скорость судна, м/с.
Для тихоходных судов:
при:
- h1 – коэффициент ε = 2.
По мере погружения кромки руля в воду ε быстро уменьшается.
Влияние корпуса на работу рулей при переднем ходе обусловлено наличием попутного потока, который направлен в сторону, противоположную набегающему на руль потоку воды. Корпус судна уменьшает скорость набегающего на руль потока, а также изменяет угол атаки пера руля.
Скорость потока в месте расположения руля:
где:
- v – максимальная скорость переднего хода, м/с;
- ψ – средний коэффициент попутного потока на переднем ходу.
Значение коэффициента ψ определяют по формуле Э. Э. Пампеля:
где:
- δ – коэффициент общей полноты водоизмещения судна;
- x – показатель степени, равный 1 для среднего руля и 2 для бортовых рулей;
- V – водоизмещение, м3;
- Dв – диаметр гребного винта, м.
При отсутствии расчетных значений диаметра винта его можно ориентировочно определить по одному из выражений:
- для одновинтовых судов:
- для двухвинтовых судов:
Рассматривая влияние гребного винта на руль, важно отметить: оно заключается в увеличении скорости обтекающего потока и его закручивании, что напрямую изменяет угол атаки. В потоке за диском гребного винта различают скорости:
- радиальные,
- аксиальные,
- тангенциальные.
При определении силы давления на перо руля учитывают только аксиальную скорость:
где:
- σр – коэффициент нагрузки винта по упору.
Коэффициент σр по смыслу представляет собой отношение статического напора, создаваемого винтом (как насосом) для упора, к динамическому напору протекающего через винт потока:
где:
- Pв – упор гребного винта.
Для руля, находящегося полностью в струе гребного винта, скорость набегающего потока:
Для руля, попадающего в струю винта лишь частично:
где:
- Fв – часть площади руля, находящаяся в потоке винта;
- F – площадь руля.
Если руль не расположен за гребным винтом, то:
Корпус судна и движитель не только изменяют скорость набегающего на руль потока, но вызывают также изменение угла атаки. В результате скоса потока угол атаки не равен геометрическому углу перекладки руля. Действительный угол атаки:
где:
- αр – геометрический угол перекладки;
- αск – угол скоса потока в горизонтальной плоскости, обусловленный влиянием очертаний кормы судна;
- αвр – угол скоса потока, вызванный вращением гребного винта;
- αс – угол скоса потока, обусловленный индуцированием вихрей по границам винтовой струи.
Углы αск, αвр и αс определяются по эмпирическим формулам, приводимым в справочниках по теории корабля и судовым устройствам. При расчете рулей для судов с умеренными скоростями хода допускается принимать α = αр.
Теперь можно определить гидродинамические силы и моменты при переднем ходе судна с учетом влияния корпуса и гребного винта. В частности:
Скорость Поперечное и продольное движение суднадвижения судна задним ходом vз меньше скорости переднего хода v и составляет:
Влияние корпуса на заднем ходу сводится лишь к некоторому подтормаживанию потока, набегающего на руль. Подтормаживание может быть приближенно учтено при помощи коэффициента попутного потока на заднем ходу ψз = 0,5ψ. Значение ψ вычисляется по формуле 26.
Скорость потока, набегающего на руль, расположенный вне струи гребного винта:
Влияние гребного винта при движении судна задним ходом проявляется в значительно меньшей степени, чем при движении передним ходом.
Если перо руля располагается перед диском гребного винта, следует учитывать аксиальную скорость:
где:
- σр. з – коэффициент нагрузки винта на заднем ходу, который в приближенных расчетах можно принимать равным σр;
- kз – коэффициент, учитывающий удаление передней кромки руля от диска гребного винта:
где:
- aв – расстояние от диска винта до передней кромки руля;
- Rв – радиус гребного винта.
Таким образом, скорость потока, набегающего на руль при заднем ходе судна, представляет собой сумму двух скоростей:
Если руль расположен не перед гребным винтом, то:
При заднем ходе принимают α = αр, т. е. углы скоса не учитывают.
Момент на баллере Mб. з определяется по формуле 24, причем входящая в нее сила:
Несмотря на меньшую силу Pn з на заднем ходу, возможны случаи, когда момент на баллере окажется большим, чем на переднем, вследствие увеличения плеча этой силы.
Расчет Гидродинамические силы, влияющие на рулевое устройство малотоннажного суднагидродинамических сил и моментов на баллере обычно выполняют в табличной форме для различных углов атаки: 5, 10, 15, 20, 25, 30, 35°. По результатам расчета строят для переднего и заднего хода графики:
Для расчета прочности элементов рулевого привода и параметров рулевой машины исходят из максимального момента на баллере, причем для учета влияния сил трения в опорах пера руля и баллера расчетное значение момента увеличивают на 10-15 %. Если окажется, что момент на заднем ходу судна больше, чем на переднем, то по нему ведут все дальнейшие расчеты.
Поворотные направляющие насадки
Данные насадки, как и рули, предназначены для обеспечения управляемости судна. Наиболее эффективными являются одиночные поворотные направляющие насадки, устанавливаемые на одновинтовых судах, и с раздельным управлением (раздельные), перекладываемые независимо одна от другой, используемые на двухвинтовых судах.
Поворотная направляющая насадка (рис. 12) состоит из:
- насадки 1;
- стабилизатора 2;
- пропульсивной наделки 3.
Она имеет в продольных сечениях форму обтекаемого профиля и охватывает с минимальным зазором лопасти гребного винта.
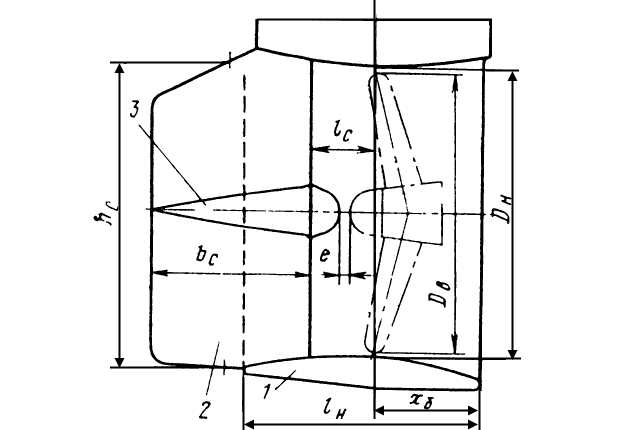
Продольный профиль насадки обращен к гребному винту выпуклой поверхностью, которая образует кольцо диаметром Dн. Зазор между концами лопастей и телом насадки делается возможно малым – не более 0,5 % от диаметра Dв гребного винта. Ось вращения насадки расположена на расстоянии xб, равном примерно 1/3 длины lн насадки от входной ее кромки. Насадка поворачивается баллером с помощью рулевой машины.
Установка направляющей насадки увеличивает площадь сечения струи, что значительно повышает КПД движительно-рулевого комплекса винт – поворотная насадка. Особенность действия насадки по сравнению с рулем заключается в возникновении гидродинамических сил, постоянно стремящихся повернуть насадку на угол, больший по отношению к обтекающему ее потоку. Для компенсации вращающего момента этих сил в диаметральной плоскости хвостовой части насадки за винтом устанавливают стабилизатор в виде вертикального крыла высотой hс и шириной bс с симметричным обтекаемым профилем.
Стабилизатор насадки имеет прямоугольное или близкое к нему очертание. Высота стабилизатора (фактическая или средняя расчетная) зависит от диаметра насадки и в выполненных конструкциях составляет:
Ширину стабилизатора обычно принимают:
Расстояние от передней кромки стабилизатора до оси баллера выбирают с таким расчетом, чтобы между обтекателями гребного винта и стабилизатора получить зазор e около 50-60 мм. Различают насадки:
- с неподвижным стабилизатором;
- с управляемым стабилизатором;
- без стабилизатора.
Функции поворотной насадки как рулевого органа осуществляются путем ее поворота на оси баллера, в результате чего нарушается симметрия обтекания насадки потоком воды. На насадку начинает действовать боковая сила, значение которой в основном зависит от угла поворота насадки и действия гребного винта, работающего в ней. Поворотная насадка с гребным винтом является единым движительно-рулевым комплексом и поэтому расчет ее действия как рулевого органа должен основываться на расчете действия гребного винта с насадкой как движителя.
Рулевые приводы
Что такое рулевой привод?
Рулевой привод – это механизм, служащий для передачи усилия от рулевой машины к баллеру руля. Судовые рулевые устройства снабжаются двумя независимыми приводами:
- основным,
- запасным.
Запасного рулевого привода не требуется на судах:
- с основным ручным приводом при наличии румпеля;
- с несколькими рулевыми органами, приводимыми в действие раздельно управляемыми рулевыми машинами;
- с одной рулевой машиной и двумя независимыми приводами, из которых с помощью каждого можно переложить руль с 20° одного борта на 20° другого борта за 60 с.
Основной и запасный приводы, а также привод одной рулевой машины могут иметь некоторые общие части, например:
- румпель,
- сектор,
- редуктор и т. д.
Основной привод должен быть, как правило, механическим. К основным видам рулевых приводов относятся:
- штуртросовый,
- валиковый,
- секторно-зубчатый,
- гидравлический.
Штуртросовый привод (рис. 13) выполняют с румпелем или сектором.
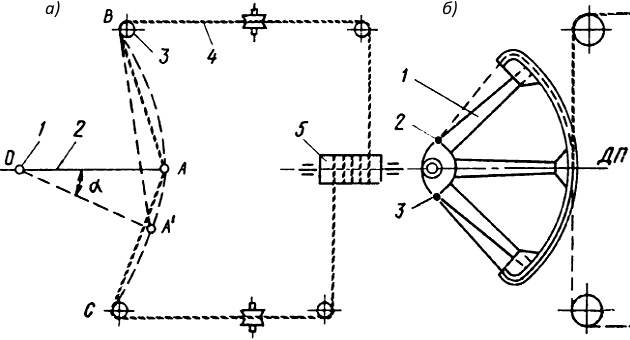
а – с румпелем; б – с сектором
Привод (рис. 13, а) состоит из румпеля 2, неподвижно насаженного на баллер 1. К свободному концу А румпеля присоединен тросовый или цепной штуртрос 4, идущий от румпеля через направляющие блоки 3 левого борта к барабану 5 рулевой машины или ручного штурвала, откуда через блоки правого борта снова к румпелю. В приводе имеются поддерживающие каточки. Недостатком такого рулевого привода является неизбежная слабина в штуртросе. Это приводит к неточной Закономерности движения крупнотоннажных судов при перекладке руляперекладке руля из-за мертвого хода барабана при выбирании слабины. Кроме того, при слабине в штуртросе возможны опасные рывки от ударов волн о перо руля.
Для доказательства неизбежности слабины в штуртросе рассмотрим промежуточное положение румпеля ОА′. Слабины в штуртросе не будет только тогда, когда удлинение левого конца штуртроса будет равно укорочению правого, т. е. когда будет соблюдено равенство отрезков:
Однако, это равенство возможно только в том случае, если точка А будет двигаться по дуге эллипса, фокусы которого находятся в точках C и B. В действительности точка А описывает дугу круга с центром О, поэтому приведенное выше равенство не будет соблюдено, т. е. слабина в штуртросе неизбежна.
Отмеченного конструктивного недостатка не имеет штуртросовый привод с сектором (рис. 13, б). Насаженный на баллер сектор 1 имеет обод с двумя ручьями для размещения штуртросов. Отрезок штуртроса, закрепленный слева у сектора 1 (в точке 2), направляется по своему ручью на правый борт судна, а отрезок, закрепленный справа (в точке 3), – на левый борт. На судах классов «О» и «М» в штуртросовую проводку включают буферные пружины, предохраняющие рулевую машину от ударного действия волны. В процессе работы рулевая машина, поочередно подтягивая одну ветвь штуртроса и одновременно освобождая другую, поворачивает сектор, а вместе с ним и руль в требуемом направлении.
Будет интересно: Электрические и электрогидравлические рулевые машины
Существенным недостатком штуртросового привода являются большие потери на трение в направляющих деталях проводки. Штуртросовый привод используют на малых и несамоходных судах: шаландах, баржах и т. д.
Более совершенным и надежным, чем штуртросовый, является валиковый привод. Его применяют в качестве основного и запасного на катерах, буксирах и других самоходных и несамоходных судах внутреннего плавания с моментом на баллере до 4 кН·м.
Валиковый ручной рулевой привод (рис. 14) состоит из колонки 5 со штурвалом 4, от которого вращение через систему угловых конических передач, валиков, муфт и других деталей передается редуктору 3 рулевой машины.
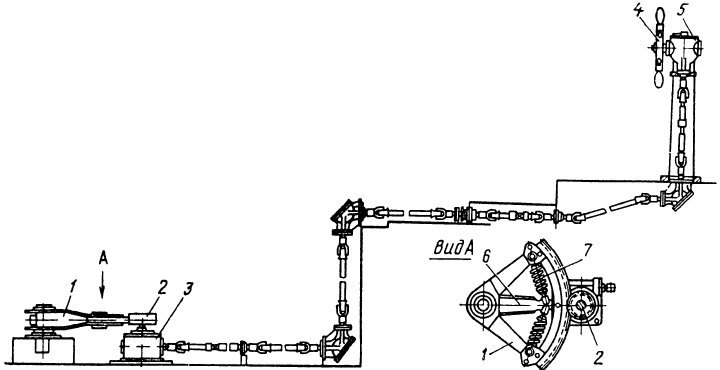
Редуктор выполняется обычно червячным с горизонтально расположенным червячным колесом. На валу колеса над редуктором устанавливается шестерня 2, зацепляющаяся с зубчатым венцом сектора 1, передающего через румпель 6 крутящий момент на баллер руля. Сектор насаживается на баллер руля свободно, а с румпелем, сидящим на баллере на шпонке, соединяется с помощью пружин 7. При нормальной нагрузке пружины не должны деформироваться, работая всегда на сжатие.
При установке рулевой машины непосредственно в румпельном отделении вблизи от баллера руля используют привод с зубчатым сектором. Цилиндрическая шестерня, сцепленная с зубчатым сектором, вращается рулевой машиной. Буферные пружины, смягчая удары волн о перо руля, предохраняют зубья от повреждения.
Наибольшее распространение получил гидравлический привод. Он обеспечивает надежную связь между рулевой машиной и баллером руля без промежуточных передач, имеет меньшую массу и габаритные размеры по сравнению с приводами других типов, легко включается при дистанционном управлении и переключается на дублирующие агрегаты. Гидропривод наиболее целесообразно применять для судов среднего и большого водоизмещения, однако он получил распространение и на малых Преимущества внутреннего водного транспорта, логистика и правовые особенностисудах внутреннего плавания. В состав гидропривода входят:
- электроприводной или ручной насос (насосы);
- трубопроводы;
- различная арматура;
- органы управления;
- исполнительный силовой механизм, механически связанный с баллером руля.
Гидропривод органически связан с гидравлической рулевой машиной и рассматривается с ней совместно.
Проектирование рулевого устройства и его элементов начинают с расчета диаметра баллера руля. У простого руля баллер до верхнего опорного подшипника работает только на кручение. Выше этого подшипника баллер, кроме кручения, испытывает также изгиб от усилия, приложенного к румпелю или сектору радиуса Rс, т. е.:
Изгибающий момент:
где:
- hр – расстояние от центра верхнего опорного подшипника до оси румпеля или сектора.
Приведенный момент у верхнего опорного подшипника:
принимается в качестве расчетного для определения диаметра баллера:
где:
- [σ] – допускаемое напряжение на кручение и изгиб для материала, из которого изготовлен баллер.
При отсутствии гидродинамических расчетов диаметр баллера руля и поворотной насадки в районе нижнего опорного подшипника должен быть не менее рассчитанного по формулам, приведенным в Правилах Речного Регистра РФ.

- Александров М. Н. Судовые устройства. Л.: Судостроение, 1968. 372 с.
- Аристов Ю. К. Судовые вспомогательные механизмы и системы. М.: Транспорт, 1985. 288 с.
- Богомольный А. Е. Судовые вспомогательные и рыбопромысловые механизмы. Л.: Судостроение, 1980. 336 с.
- Воронов В. Ф., Арциков А. П. Судовые гидравлические машины. Л.: Судостроение, 1976. 302 с.
- Валдаев М. М. Гидравлические приводы судовых палубных механизмов. Л.: Судостроение, 1973. 296 с.
- Войткунский Я. И., Першиц Р. Я., Титов И. А. Справочник по теории корабля. Л.: Судостроение, 1973. 512 с.
- Жмудь А. Е. Винтовые насосы с циклоидальным зацеплением. М.-Л.: Машгиз, 1963. 156 с.
- Женовак Н. Г. Судовые винтовые негерметичные насосы. Л.: Судостроение, 1972. 144 с.
- Завиша В. В., Декин Б. Г. Судовые вспомогательные механизмы и системы. М.: Транспорт, 1984. 358 с.
- Камнев Г. Ф., Кипарский Г. Р., Балин В. М. Подъемно-транспортные машины и палубные механизмы. Л.: Судостроение, 1976. 312 с.
- Краковский И. И. Судовые вспомогательные механизмы. М.: Транспорт, 1972. 384 с.
- Ломакин А. А. Центробежные и осевые насосы. М.-Л.: Машиностроение, 1966. 364 с.
- Певзнер Б. М. Насосы судовых установок и систем. Л.: Судостроение, 1971. 383 с.
- Петрина Н. П. Судовые насосы. Л.: Судостроение, 1962. 376 с.
- Правила классификации и постройки судов внутреннего плавания/Речной Регистр РСФСР. М.: Транспорт, 1984. Т. 3. Ч. VIII.
- Сизов Г. Н., Аристов Ю. К., Лукин Н. В. Судовые насосы и вспомогательные механизмы. М.: Транспорт, 1982. 303 с.
- Сторожев Н. Ф. Судовые сцепные устройства. М.: Транспорт, 1978. 272 с.
- Чиняев И. А. Насосные установки танкеров и плавучих нефтестанций. М.: Транспорт, 1968. 112 с.
- Чиняев И. А. Эксплуатация насосов судовых систем и гидроприводов. М.: Транспорт, 1975. 160 с.
- Чиняев И. А. Роторные насосы: Справочное пособие. Л.: Машиностроение, 1969. 216 с.
- Чиняев И. А. Лопастные насосы: Справочное пособие. Л.: Машиностроение, 1973. 184 с.
- Чиняев И. А. Паровые насосы. Л.: Машиностроение, 1980. 189 с.
- Чиняев И. А. Поршневые кривошипные насосы. Л.: Машиностроение, 1983. 176 с.
- Чиняев И. А. Судовые системы. М.: Транспорт, 1984. 216 с.
- Чиняев И. А. Судовые вспомогательные механизмы. М.: Транспорт, 1989. 295 с.
- Шмаков М. Г. Судовые устройства. М.: Транспорт, 1977. 279 с.
- Юдин Е. М. Шестеренные насосы. М.: Машиностроение, 1964. 236 с.





