Рассмотрим процессы регулирования в системе автоматического Движение судна постоянным курсом при изменении режимов работы движителейуправления движением судна по заданному курсу. На рис. 1, а представлена функциональная схема регулятора — авторулевого, работающего в режиме стабилизации на заданном курсе. Сельсин приемник курса а судна, подключенный к сельсину датчика гирокомпаса, передает вращение на механический дифференциал, на который также передается вращение от штурвала управления.
- Динамика автоматического управления движением судна
- Основные сведения о регулировании СЭУ с ВРШ
- Способы ограничения нагрузки дизеля. Общие сведения
- Общие сведения об автоматизации землесосов. Система автоматического регулирования землесоса
- Нелинейный анализ процессов в системе автоматического регулирования (на примере САР насыщения пульпы гидроперегружателя)
Динамика автоматического управления движением судна
Сигнал рассогласования Δa = a – a3 (перечисленные элементы обозначены элементом сравнения ЭС) поступает на суммирующий элемент (например, врщающийся трансформатор). С помощью дифференцирующего звена (ДЗ) увеличивается быстродействие авторулевого, а с помощью интегрирующего звена (ИЗ) может повышаться точность системы управления движением судна в условиях воздействия на судно со стороны ветра и волны при длительном движении на заданном курсе. Сумма всех сигналов подается на вход усилителя УС, а затем на исполнительный механизм ИМ — рулевую машину. Одновременно с перекладкой руля поворачивается ротор линейного вращающегося трансформатора руля, напряжение которого, пропорциональное углу перекладки руля p, поступает на роторную обмотку трансформатора (суммирующего элемента) и является сигналом отрицательной дополнительной обратной связи авторулевого.

Таким образом Авторулевой Аист, общие характеристикиавторулевой реализует пропорционально-дифференциально интегральный закон регулирования (ПИД):
где:
- — коэффициент передачи.
Для анализа устойчивости рассмотрим случай, когда закон регулирования имеет вид:
Инерционностью промежуточных звеньев авторулевого: сельсинов, трансформаторов и усилителей по сравнению с инерционностью звеньев ИД-PM можно пренебречь.
Уравнение рулевой машины упрощенно можно представить в виде — инерционного звена и звена с запаздыванием:
Структурная схема системы представлена на рис. 1, б. Передаточная функция разомкнутой системы имеет вид:
Устойчивость системы обеспечивается за счет выбора коэффициента передачи Kn и коэффициента внутренней обратной связи Kос.
Основные сведения о регулировании СЭУ с ВРШ
Основные понятия. Режимы работы судовой энергетической установки с винтом регулируемого шага и способы ограничения нагрузки дизеля обычно излагаются в статье «Энергетическая установка, системы и трубопроводы плавучей буровой установкиСудовые энергетические установки», так как обоснование этих режимов и способов ограничения нагрузки требует детального изучения процессов и изменение показателей судового дизеля при различных режимах. Поэтому ниже эти вопросы рассматриваются кратко, только с позиции принципов работы системы автоматического управления. Винт регулируемого шага широко применяются для ледоколов, Морские буксирные суда, классификация и видыбуксиров, траулеров. Шаг винта изменяется и фиксируется механизмом изменения шага (МИШ).
Изменение шага винта позволяет:
- изменять упор винта (и мощность) при неизменной частоте вращения, т.е. обеспечивать работу дизеля по нагрузочной характеристике, что необходимо в случае работы валогенератора;
- улучшать маневренные качества судна, так как одновременное изменение частоты вращения и шага винта позволяет быстрее осуществить маневр;
- оптимизировать подачу топлива во всем диапазоне скоростных режимов;
- реверсировать винт без наличия специальных реверсивных муфт или механизма реверса и сократить тормозной путь.
Управление винтом регулируемого шага осуществляется по законам программного или автоматического управления. Например, при маневровых режимах производится программное комбинированное управление шагом H/D и частоты вращения винта n (диаграмма на рис. 2)

H/D – отношение шага винта к его диаметру; ПХ — передний ход; ТЛГ — положение телеграфа на мостике
С увеличением n шаг H/D возрастает, что позволяет более оперативно выполнить маневровый режим.
При дальнейшем увеличении нагрузки воздействие на шаг винта прекращается и на режимах полного хода дизель работает на характеристике винта фиксированного шага (ВФШ). Влияние гребного винта регулируемого шага (ВРШ) и руля на управляемость суднаАвтоматическое управление ВРШ осуществляется, например, при волнении моря и работе валогенератора. В этом случае с увеличением нагрузки на винт фиксированного шага при попадании винта в гребень волны, частота вращения дизеля и валогенератора снижаются, что ухудшает качество электрической энергии. Схема управления ВРШ представлена на рис. 3.

1 — Комбинатор; 2 — регулятор шага; 3 — регулятор нагрузки; 4 — датчик рейки топливных насосов; 5 — всережимный регулятор дизеля; 6 — датчик частоты вращения; 7, 8 — элементы МИШ; 9, 10 — рукоятка управления ЦПУ и на ходовом мостике
В случае применения ВРШ датчик частоты вращения 6 посылает сигнал на регулятор нагрузки 3, и дальше на элементы МИШ 2, 8, 7, шаг винта уменьшается и частота вращения стабилизируется.
Поясним механизм автоматического регулирования ВРШ в этом случае с помощью анализа системы дифференциальных уравнений.
Уравнение вращения дизеля:
где:
- Ta постоянная времени вращающихся масс дизеля, валопровода и винта;
- μ — относительное изменение эффективного момента дизеля;
- — относительное изменение частоты вращения;
— относительное изменение момента винта, создаваемого волнением моря с частотой Ω и амплитудой a;
- λ0 — постоянная (средняя) величина момента на холостом ходу λ0 = 0;
- λш — Гидродинамические характеристики гребных винтов и технология построения паспортных диаграммизменение момента на винте вследствие изменения.
Рассматривается случай когда период волны составляет несколько секунд. В этом случае регулятор скорости, постоянные времени элементов которого составляет десятые доли секунды, может бьггь принят безинерционными.
Его уравнение принимает вид:
где:
- Z — изменение хода муфты регулятора в относительных единицах.
Уравнение основной обратной связи:
В случае применения ВФШ модуль частотной передаточной функции замкнутой системы примет вид:
где:
- Ω — частота колебаний.
Амплитуда изменения частоты вращения φa равна:
Увеличением Kp можно добиться снижения амплитуды колебаний φa. Однако рост Kp приводит к неустойчивой работе регулятора и системы. Обычно наклон регуляторной характеристики САРС лежит в пределах 10-15%, т.е. Kp ≈ 7ч ÷ 10.
Предлагается к прочтению: Парусно-винтовые линейные корабли
В случае применения ВРШ структурная схема системы примет вид, показанный на рис. 4. На схеме показано инерционное звено, соответствующее МИШ с постоянной времени Tш и коэффициентом передачи Kш.

МИШ играет роль дополнительной отрицательной связи, так как его действие приводит к ослаблению возмущающего воздействия волны.
Передаточная функция замкнутой системы примет вид:
Легко показать что амплитуда колебаний частоты вращения гребного вала φa при действии системы регулирования ВРШ уменьшится.
Уменьшение достигается увеличением коэффициента передачи МИШ Kш или уменьшением постоянной времени Tш. При условии, что Tш и Ta по сравнению с периодом волны относительно малы, получим:
Способы ограничения нагрузки дизеля. Общие сведения
Заводское ограничение нагрузки судового дизеля осуществляется путем установки упора максимальной подачи рейки топливных насосов из расчета, что предельно допустимая мощность Pemax не должна превышать 10 % от Peном. В пропульсивном дизеле, работающем по винтовой характеристике:
Установка упора осуществляется с запасом по цикловой подаче равной около 7 % при (hp max = 1,07hp ном) частота вращения
Величина упора рейки топливных насосов дизельгенератора, работающего по регуляторной характеристике с наклоном 2-3%, устанавливается с запасом по цикловой подаче 10% (hp max ≈ 1,1hp ном) Напомним, что при максимальной цикловой подаче ТНВД клапанного типа с регулированием по началу подачи дизельного топливадизель должен работать лишь ограниченное время 0,5 ÷ 2 часа, установленное заводом-изготовителем.
При снижении частоты вращения параметры дизеля, определяющие его тепловую и механическую напряженность, могут возрасти при условии, что цикловая подача топлива hp ≤ hp ном. Причиной этому могут быть повышенные тепловые нагрузки, например, вследствие снижения a1 или механические нагрузки, например, из-за увеличения Pmax вследствие роста периода задержки самовоспламенения. Вместе с тем возможны случаи когда винт длительное время работает по тяжелой характеристике и регулятор скорости выводит рейку на упор. Для ограничения цикловой подачи на тяжелых режимах применяются подвижные упоры максимальной подачи, временно ограничивающие подачу топлива, конструкции исполнительных механизмов которых могут быть механическими, гидравлическими и пневматическими. В качестве контрольных параметров этих устройств используются:
- для дизелей с газотурбинным наддувом — давление наддува, так как этот параметр позволяет более точно поддерживать постоянными соотношение топливо — воздух и поэтому контролировать тепловую напряженность. Достоинством такого регулирования является ограничение дымности дизеля с газотурбинным наддувом в установившихся и переходных режимах.
- устройство, регулирующее мощность дизеля (дизель-генератора) по определенному закону в функции от частоты вращения или момента ВРШ или электродвигателя винта. Датчики частоты вращения и хода рейки топливных насосов позволяют зарегистрировать мощность дизеля (или упора винта и силы тока тягового электродвигателя). Сигнал от датчиков поступает на устройство управления, которое передает сигнал на управление регулятором скорости и ограничителем хода рейки топливных насосов.
Для двигателей с высоким pmeint положение золотника должно изменяться в зависимости от давления наддува. Структурная схема такой конструкции (рис. 5) включает регулятор скорости PC и механизм управления ограничителя передвижения золотника МУ. Преобразователь давления ПД передает сигнал на гидравлический усилитель У с обратной связью. Сервомотор усилителя СМ передвигает ограничитель хода ОХ золотника 3 основного регулятора скорости. При изменении частоты вращения изменение положения золотника происходит только до положения, определяемого ограничителем хода ОХ. Сервомотор регулятора следящего типа СМ передвигает рейку топливных насосов дизеля согласно движению золотника. Увеличение давления наддува pint приводит к передвижению ограничителя ОХ, соответствующему увеличению цикловой подачи.

Другого типа воздействие на измеритель — через пружину грузов измерителя — осуществляется в конструкции Харьковского завода транспортного машиностроения им. В.А. Малышева, включающей регулятор скорости и систему управления затяжкой его пружины. При набросе нагрузки на дизель-генератор электромагнитный клапан передвигает золотник, который подает масло в систему управления затяжкой пружины. Давление масла регулируется преобразователем давления наддува.
Читайте также: Носовое подруливающее устройство. Буксиры
Подобные устройства применяются в случаях:
- движения судна на мелководьях;
- применения ВРШ управления подачей топлива при волнении моря с целью повышения средней частоты вращения винта и скорости судна при электродвижении, при оптимизации режима работы дизель-генератора и электродвигателя, вращающего винт.
Устройства имеют внутреннюю обратную связь обеспечивающую устойчивость системы.
Ограничение подачи топлива в режимах разгона и наброса нагрузки. В режимах наброса нагрузки судового дизель-генератора с турбонадцувом или в режимах разгона судового пропульсивного дизеля возникает несоответствие между цикловой подачей топлива и количеством воздуха в цилиндре из-за запаздывания в раскрутке турбокомпрессора. В результате дымность резко возрастает, индикаторный КПД снижается и расход топлива увеличивается.
Для ограничения подачи топлива в этот период используют ограничители цикловой подачи 2-х типов:
- временно, с заданной выдержкой, ограничивающие выход рейки топливных насосов в положение, соответствующее новой нагрузке;
- управляемые от давления наддува.
С ростом давления наддува устройство «разрешает» рейке топливных насосов увеличить подачу топлива.
На рис. 6 в качестве примера показана конструкция ограничителя подачи топлива, который для двигателей с высоким давлением pω обеспечивает торможение рейки в конце ее хода при набросе 100 % нагрузки. Вместе с тем этот ограничитель позволяет увеличить подачу — топлива свыше 110 %, если давление наддува достаточно велико, например при набросе нагрузки на частично нагруженный Основы взаимодействия дизеля и устройств автоматического регулированиядизель-генератор.

В корпусе 1 установлены подвижный упор 9, золотник 2, клапан 3, на который действует орган дозирования — рычаг 5, золотник наддува 16. Напорная магистраль подсоединена к входным каналам вспомогательной 7 и основной 11 камер через дроссели 8 и 12.
При набросе нагрузки регулятор скорости перемещает рычаг 5 в сторону увеличения подачи топлива. Когда ры-чаг достигает положения, соответствующего оптимальному значению подачи топлива, болт 6 упирается в упор 9 и рычаг 5 перемещается в соответствии с ростом давления наддува.
В положении рычага 5, соответствующем подаче топлива 100 %, болт 4 перемещает клапан 3 в нижнее положение. Золотник 2 перекрывает слив масла из камеры 11 через канал 10 за время, определяемое объемом камеры 7 и проходным сечением дросселя 8. Упор 9 возвращает рычаг 5 в положение, соответствующее подаче топлива 100 %.
При постепенном увеличении нагрузки на двигатель или набросе нагрузки на частично нагруженный двигатель золотник 16 не препятствует сливу масла из камеры 11 и, следовательно, перемещению рычага 5 в положение максимальной подачи топлива. Для регулирования используются дроссели 8, 14, 17, пружина 13, болт 15.
Общие сведения об автоматизации землесосов. Система автоматического регулирования землесоса
Служебно-вспомогательный, технический и рыбопромысловый флотЗемлесосные снаряды оборудуются системой автоматизации, которая включает:
- систему автоматического управления продвижением землесоса по прорези;
- систему автоматического регулирования консистенции пульпы, обеспечивающую постоянство плотности пульпы путем воздействия на скорость его перемещения;
- автоматическое измерение глубин для управления заглубления сосуна;
- автоматику безопасности, обеспечивающую сигнализацию и остановку землесоса в случае нарушения нормального режима работы.
Кроме того, обеспечивается автоматизация процессов управления энергетической установкой и вспомогательного оборудования. Система автоматического управления перемещением землесоса по прорези включает устройства для определения места положения землесоса. Эти устройства могут быть разделены на две основные группы:
- основанные на механической связи с ориентирами, например, с помощью папильонажных или становых тросов;
- основанные на немеханической связи — пеленгационные, Навигационное оборудование при плавании на яхтес помощью пеленгаторов;
- дальномерные, которые используют радиолаги, однако эти устройства требуют питание сравнительно большой мощности, разностнодальномерные и дальномерно-пеленгационные, требующие сложной аппаратуры.
Наиболее перспективными, обеспечивающими требуемую точность замеров — являются радиофазные дальномерные устройства. Сигналы с указателя положения землесоса на прорези об отклонении корпуса землесоса от оси траншеи поступают на систему автоматического управления рабочим перемещением, которая обеспечивает движение землесоса вдоль траншеи с минимальным отклонением его от оси траншеи. С регулятора сигнал поступает в исполнительные устройства. Одновременно система обеспечивает контроль за сползанием якорей.
Так как дноуглубительные землесосы должны обеспечить разработку прорези определенной формы, то должен быть обеспечен контроль глубин. Измеритель глубины связан с автоматическим регулятором заглубления сосуна. Для измерения глубин могут использоваться эхолоты, а также способы, основанные на измерении гидростатического давления столба воды над определенной точкой рамы грунтозаборного устройства и измерения угла наклона рамы относительно корпуса снаряда или вертикали. Кроме того необходимо измерять уровень воды в реке.
Это интересно: Современные транспортные суда различного назначения
Для автоматического регулирования консистенции пульпы служит система автоматического регулирования САРЗ. Назначение системы — поддерживать на заданном уровне консистенцию пульпы. Система включает датчик плотности — консистомер, устройства преобразования, равнения с заданным и усиления сигналов, полученных от консистомера и передачи их на исполнительный орган землесоса — становую лебедку, скорость выбора троса с помощью которой обеспечивает необходимую консистенцию.
Помимо перечисленных устройств имеется автоматика сигнализации и защиты, которая позволяет предупредить выход из строя рабочего оборудования в случае нарушений нормальной работы землесоса по причинам:
- забой напорной части грунтопровода, возникающий при недостаточной транспортирующей способности пульпы;
- засорение наконечника всасывающей трубы различными предметами;
- завал наконечника всасывающей трубы грунтом, обваливающимся с переднего откоса траншеи.
Чувствительным элементом САРЗ является консистомер. Среди большого количества различных конструкций консистомеров нашли наиболее широкое применение:
- основанные на определении разности давлений в различных точках вертикального участка грунтопровода;
- на измерении некоторых физических величин, например, γ-излучения.
Рассмотрим принципиальную схему и проведем линейный анализ устойчивости САРЗ, представленной в качестве примера на рис. 7, а. Сигнал Uк с консистомера К (в данном случае работающего по принципу измерения разности давлений) поступает на элемент сравнения, с заданным уровнем плотности пульпы, после чего усиливается в усилителе У, подается на устройство возбуждения (УВ), которое в частности может включать электродвигатель сервопривода, вращающий вал реостата возбуждения Расчет судовой электроэнергетической системысистемы генератор — двигатель передней становой лебедки С; (через редуктор Р).

ГН — грунтовый насос; К — консистомер; uo, uк — заданная и фактическая величина регулируемого параметра — консистенции в форме напряжения постоянного тока; Y — усилитель, УВ — устройство управления возбуждением генератора; ОВГ— обмотка возбуждения генератора; Д — электродвигатель становой лебедки; Р — редуктор; СЛ — становая лебедка
Увеличение плотности пульпы по сравнению с заданной приводит к замедлению скорости вращения СЛ и наоборот.
Примем условно, для упрощения анализа, что Биосфера океанов и развитие промышленной марикультурырельеф дна и плотность грунта постоянные в месте передвижения землесоса по прорези. При этих условиях можно считать, что скорость передвижения землесоса по прорези V3 определяет плотность пульпы γ: чем больше скорость, тем больше плотность.
При линеаризации зависимости γ(V3) можно приближенно принять, что γ = CкV3, где Cк — коэффициент пропорциональности, γ — регулируемая величина, т.е. выходная величина объекта.
Если принять, что скорость передвижения землесоса пропорциональна скорости вращения становой лебедки ωсл, то объект можно было бы считать безинерционным звеном. Однако изменение скорости вращения может произойти только при наличии ускорения, которое зависит от массы передвигаемого снаряда. Следует учесть, что имеется определенная дополнительная инерционность, связанная с выбором тросов становой лебедкой.
Поэтому объект регулирования — землесос — можно условно представить в виде инерционного звена, входной величиной которого является скорость вращения становой лебедки, выходной — регулируемая величина — скорость передвижения снаряда или плотность пульпы γ
где:
- Tоб и Kоб — постоянная времени и коэффициент передачи объекта.
Консистомер можно условно принять безинерционным звеном, т.к. его постоянная времени относительно мала. Напряжение на выходе консистомера Uк = Kкγ, где Kк — коэффициент передачи консистомера. Напряжение на входе устройства возбуждения Uв = (Uк — Uо)Kу а напряжение на входе генератора Uвг системы генератор — двигатель (Г — Д)
где:
- Tвг — постоянная времени, c, определяемая электромагнитной инерционностью и инерционностью подвижных частей УВ;
- Kвг — его коэффициент передачи;
- Kу — коэффициент усиления усилителя у.
Учтем инерционность системы генератор — двигатель (Г — Д), в результате получим:
Процессы в судовых системах автоматического управления. Особенности настройки регуляторовСтруктурная схема САРЗ, представленная на рис. 7, б — одноконтурная, поэтому для обеспечения ее устойчивости необходим разумный выбор коэффициента усиления разомкнутой системы, где:
где:
Если использовать критерий Вышнеградского, то учитывая, что Tвг « Tоб и Tгд « Tоб получим:
Так как коэффициент передачи чувствительного элемент обычно принимается максимальным, а Kоб определяется характеристикой объекта, то необходимо выбрать
Нелинейный анализ процессов в системе автоматического регулирования (на примере САР насыщения пульпы гидроперегружателя)
В качестве примера использования метода гармонической линеаризации проведем анализ процессов в системе автоматического регулирования насыщения пульпы гидроперегружателя, схема и принцип действия которой приводятся на рис 8.

Б — баржа с грузом; ГН — грунтовый насос; К — консистомер; СД — сельсин-датчик; СТ — сельсин-трансформатор; У — усилитель фазочувствительный (электрический); ЭМ — электромагнит; СМ — сервомотор; КЛ — клапан регулирования подачи размывочной воды; ак, ао — фактическое и заданное значения регулируемой величины в пересчете на угловое перемещение
Задание регулируемой величины α осуществляется поворотом ротора сельсина — датчика, положение которого электрически связано с положением ротора сельсина — трансформатора. При отклонении консистенции пульпы от заданного на выходе сельсина-трансформатора появляется напряжение Um фаза которого зависит от знака разности α0 – αк. Если значение напряжения на входе в усилитель превышает зону нечувствительности, то фазочувствительный усилитель У усиливает Средства автоматизации главных энергетических установокэлектрический сигнал, подавая его в зависимости от фазы на одну из обмоток электромагнита ЭМ. Электромагнит передвигает золотник гидравлического усилителя и сервомотор СМ изменяет положение клапана КЛ, восстанавливая требуемое значение консистенции пульпы. Таким образом, в рассматриваемой системе имеется нелинейное звено в виде реле с зоной нечувствительности.
Проведем следующие рассуждения для выбора параметров системы. Согласно “Судовые автоматические системы, регулировка дизеля и котлаОсновные свойства объектов автоматических систем судна“, объект регулирования может быть описан линейным дифференциальным уравнением 1-го порядка: Tapγ + βφ = Z-λ.
Учтем также запаздывание в передаче сигнала консистомеру, расположенному на определенном расстоянии от зева сосуна, величиной τоб. Здесь γ — относительное изменение плотности, Z — изменение хода клапана в относительных единицах.
Условимся, что при изменении хода клапана н единицу плотность в конечном счете изменится тоже на единицу, что будет соответствовать значению β = 1.
Примем значение Tоб = 10с, а в величине τоб учтем «чистое» запаздывание и в других элементах системы, примем τоб = 0,5с. Тогда передаточная функция объекта может быть написана в виде:
где:
- Tоб = 10с, τоб = 0,5c, Kоб = 1.
Условимся, что консистомер изменяет величину сигнала ак на выходе следующим образом: когда относительное изменение плотности составит 1, то относительное изменение αк и Um также составит значение, равное 1. Таким образом, коэффициент передачи от консистомера Kp до усилителя у принят равным единице, соответствующие промежуточные звенья — безынерционными.
Следует иметь в виду, что усилитель дает на выходе стандартный сигнал, например, ±24 в, который приводит к полному открытию золотником окна во втулке. Если время сервомотора Ts получено экспериментально, как время на передвижения клапана КЛ от полного открытия до полного закрытия (или наоборот), то передаточная функция регулятора примет вид:
где:
- Kp = 1;
- Ts — постоянная времени сервомотора, a
где:
- С = 1;
- b/а — относительная величина зоны нечувствительности;
- a — Динамика двигателя судна, условия и оценка работыамплитуда колебаний напряжения на входе в усилитель, выраженная также в относительных единицах.
Примем: Ts = 1c.
Расчеты АФХ разомкнутой системы — структурная схема которой дана на рис. 9 — приведены в табл. 1.

На рис. 10 приведены части АФХ для 2-х амплитуд: α = 0,4 и α = 0,5 при значении b = 0,3. Таким образом, при сделанных допущениях и выбранных параметрах b рассматриваемой системе могут быть два вида переходных процессов. При малых возмущениях, когда a < 0,3 — система устойчива.
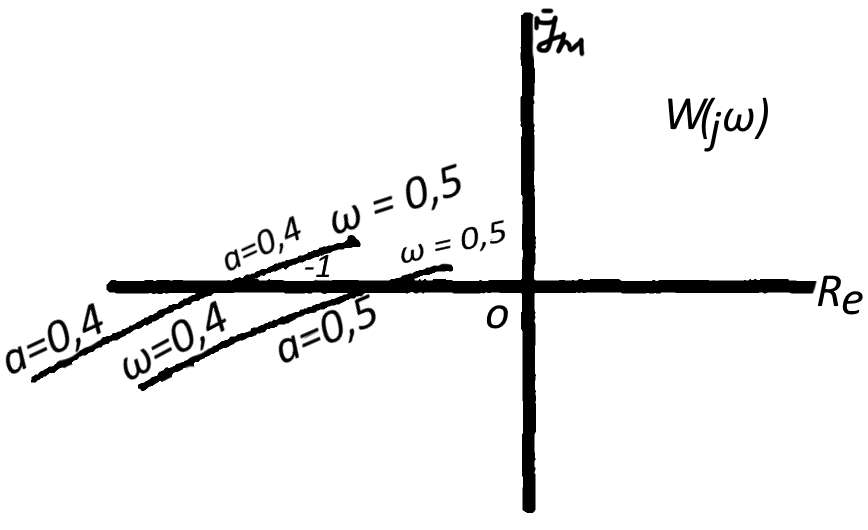
При больших начальных возмущениях в системе возникают устойчивые автоколебания с частотой ω ≈ 0,4 рад/с, амплитудой α « 0,45. Повышение запаса устойчивости может быть достигнуто путем увеличения зоны нечувствительности b. Однако, при увеличении b амплитуда возможных изменений плотности увеличивается.
Это инетересно: Конструкция надстроек и рубок
(Настоящий анализ приведен только в качестве примера, характеризующего устойчивую и неустойчивую работу нелинейной системы и способа гармонической линеаризации для ее исследования. Данные могут не соответствовать реальной работе, примеч. автора.)





