В процессе эксплуатации механические подвижные элементы средств автоматики СЭУ изнашиваются, в соединениях появляются люфты, увеличиваются зазоры между трущимися деталями, изменяется жесткость пружин и сильфонов. В результате старения и загрязнения масла увеличивается трение. Электрические контакты подгорают, изменяются характеристики электрических элементов. В результате увеличивается зона нечувствительности и ухудшаются статические характеристики. Ухудшаются динамические характеристики регуляторов и показатели качества переходных процессов. Критерием ухудшения свойств регулятора скорости являются статические характеристики и показатели переходных процессов, прежде всего при ступенчатом сбросе нагрузки, когда показатели переходных процессов зависят также от характеристик агрегатов турбонадцува, поэтому выявить неисправности в регуляторе скорости сложнее.
- Эксплуатация средств автоматики
- Краткие сведения по тренажерам автоматизированных дизельных установок
- Тренажёр машинного отделен
- Приложение 1. Устройство сигнализации и управления дизелем УСУ-Д-1М ААРЛ. 421451. 001ТУ
- Приложение 2. Датчики-реле температуры ТАМ102
- Приложенеие 3. Датчики-реле давления ДЕМ105
- Прибор контроля давления двух, одноканальный ПКД-2, ПКД
- Приложенеи 4. Приборы контроля частоты вращения ПКЧВ
- Приложение 5. Прибор контроля уровня масла и топлива двух-, одноканальных ПКУ-М-2, ПКУ-М
- Приложение 6
- Приложение 7
- Приложение 8. Принципиальные схемы некоторых распространенных конструкций регуляторов зарубежных фирм
- Схема регулятора «Вудвард UG-8»
- Схема регулятора «Вудвард» PGA
- Схема электронной системы управления впрыскиванием «МАН»
- Автоматически регулируемая аккумуляторная система топливоподачи как эффективный способ снижения и удельного расхода топлива судового дизеля
- Схема пневматического регулятора температуры «Плайгер»
- Регулятор температуры «Плайгер»
- Приложенеи 9. Пример исследования на ЭВМ влияния параметров регулятора скорости прямого действия с упруго присоединенным катарактом на процесс регулирования дизеля при набросе нагрузки
- Приложение 10. Тестовые вопросы по дисциплине “Автоматизация судовых энергетических установок”
Эксплуатация средств автоматики
Напомним, что при ступенчатом сбросе 100 % нагрузки с дизель-генератора Основы взаимодействия дизеля и устройств автоматического регулированияизменение частоты вращения двигателя в системах регулирования 3 класса точности не должно превышать 10 % номинальной частоты вращения, а длительность переходного процесса для регуляторов этого класса не должна быть более 10 с.
Статическая настройка регуляторов скорости сводится к установлению наклона статической характеристики системы регулирования дизеля в пределах 2 % ÷ 3 % в соответствии с ТУ на поставку.
Эта настройка производится путем изменения наклона дополнительной пружины регулятора скорости прямого действия или регулирования коэффициента усиления (передачи) жесткой обратной связи регулятора скорости непрямого действия.
Динамическая настройка производится путем регулирования положения иглы упруго присоединенного катаракта или гибкой обратной связи.
Дополнительная регулировка, осуществляемая обычно на заводах-изготовителях дизелей, включает подбор пружины катаракта или гибкой обратной связи с необходимой жесткостью, а также положения ведомого поршня обратной связи по отношению к окнам слива, что обеспечивает временное выключение ГОС для увеличения быстродействия скорости.
Для обеспечения равномерности распределения нагрузки при параллельной работе ДГ необходимо обеспечить одинаковые наклоны статических характеристик каждого ДГ. В этом случае при подключении ДГ 2 к уже работающему ДГ 1 достаточно синхронизировать ДГ 2 при его работе на холостом ходу с ДГ 1, а затем увеличить затяжку пружины регулятора скорости ДГ 2 до те пор, пока нагрузки обоих не будут выравнены. При нагрузке 50 % частота тока должна составлять 50 Гц.
Допустимые пределы наклона регуляторной характеристики для главных двигателей составляют обычно (от-12 %), в случае, если ГД установлен совместно с валогенератором, то рекомендуемый наклон регуляторной характеристики (4,0 ± 0,5).
В приложении 6 приведены основные неисправности регуляторов скорости.
К основным неисправностям регуляторов температуры относятся:
- утечка рабочей жидкости и Расчет систем судовых энергетических установокполомка магистралей, соединяющих чувствительный элемент с сильфоном регуляторов прямого действия;
- попадание воды, масла и механических примесей в воздух в регуляторах типа РТНД
Характерные неисправности пневматических регуляторов температуры типов РТПД и РТНД приведены в приложении 6.
Краткие сведения по тренажерам автоматизированных дизельных установок
Автоматизация СЭУ значительно усложняет обязанности судовых механиков. С целью повышения квалификации судовых механиков в управлении автоматизированными установками и поиске неисправности широко используются тренажеры.
Конструкции тренажеров можно подразделить на тренажеры, широко использующие стандартное судовое оборудование систем ДАУ и пульты управления, и тренажеры, использующие в основном компьютерные имитаторы работы систем автоматики.
В состав ряда тренажеров первого типа входит стандартное судовое оборудование: пульты управления, регуляторы скорости, органы управления местного поста управления, шкафы системы ДАУ, а также имитаторы главных двигателей в виде электродвигателей постоянного тока, соединенных с регулятором скорости, датчики частоты вращения и др. К таким тренажерам относится тренажер ДАУ фирмы «Юнгер» Швеция.
К тренажерам второго типа относится тренажер фирмы «Норконтрол» (Норвегия).
В составе тренажера «Норконтрол» имеется ЭВМ типа «Норд-100», которая используется для реализации математической модели автоматизированной СДУ, в частности: главных двигателей, парового комбинированного котла, судовой электростанции, представленной двумя дизельгенераторами, валогенератором, ГРЩ, систем подготовки топлива, сжатого воздуха и общесудовых систем. Имитационная модель тренажера судового механика содержит около тысячи наиболее часто возникающих неисправностей судовых систем и служат для отработки навыков в их ликвидации.
Ниже приводится рекламный проспект компьютерного тренажера фирмы «Шип-аналитик».
Ship Analytics GMDSS Simulator
Обеспечивает эффективную тренировку
Имитируемые системы дают большую гибкость, чем реальное оборудование:
- Имитируемое оборудование сводит на нет опасность получения ложных аварийных сигналов, исходящих от реального оборудования. Прямое назначение систем GMDSS IMO — избежать аварий. Реальное оборудование ломается, симулируемое же позволяет изучать и отрабатывать все Анализ характерной аварии крупнотоннажного танкера в открытом мореаварийные процедуры без реальной аварии.
- Стоимость настоящего оборудования и его обслуживания неприемлема для тренировок. Имитируемое оборудование требует только наличия персональных компьютеров и почти никакого обслуживания.
- Имитация позволяет точно моделировать разные условия работы оборудования, что часто невозможно на реальных машинных в лабораторных условиях. Это дает более высокое качество обучения и исправления ошибок.
- Можно подсоединить GMDSS к имитаторам управления судном и учесть его движение и общее управление, что невозможно на реальном лабораторном оборудовании. В данном имитаторе доступна полная подсистема инструкций подключения к другим программам Ship Analytics, например Радарному, Штурманскому и Судоводительскому симуляторам.
- Имитируемое оборудование может быть использовано в разных целях, например на Курсах повышения квалификации. Виртуально, любой учебный план в мореходном училище, базированный на компьютерном обучении, может использовать эту программу. Это увеличивает пропускную способность и разгружает бюджет учебного заведения.
- Имитируемое оборудование рекомендовано к применению на курсах IMO, удовлетворяет требованиям IMO, представляет собой передовую технологию обучения международного класса.
- Имитация дает великолепные возможности расширения тренировочной базы. Индивидуальная тренировочная станция GMSS умещается в одном персональном компьютере. Доступ к оборудованию осуществляется мышью или (опционально) чувствительным экраном. Конфигурация позволяет иметь класс с 10 или более обучаемыми, и у каждого — свой полный набор оборудования, эквивалентного реальному. В данном случае преимущество перед лабораторным комплексом составляет 10 к 1.
Тренажёр машинного отделен
Тренажёр машинного отделения с главными средне-оборотными двигателями UN1TEST предназначен для обработки решения задач в машинных отделениях.
Основной целью тренажёра является практическая подготовка к работе в машинном отделении, и в частности:
- ознакомление с основными установками машинного отделения (системой сжатого воздуха, системой охлаждения, гидравлической системой гребного винта регулируемого шага);
- освоение процедуры запуска главных двигателей и вспомогательных механизмов;
- управление движительной системой (Стационарные двигательные установки малотоннажных судовглавный двигатель — редуктор — гребной винт регулируемого шага (ВРШ)).
Тренажёр оснащён настольным пультом управления (в реальную величину), который позволяет управлять и контролировать работу главных двигателей, передаточного механизма и ВРШ.
Установка программного обеспечения тренажёра осуществляется пользователем и не требует обслуживания производителя.
Кроме того, пользователь получает программное обеспечение для испытания функционирования электронной системы пульта управления.
Программное обеспечение также позволяет устанавливать ресурсы машинного отделения и загружать их или сохранять установки.
Язык программного обеспечения — английский.
Программное обеспечение даёт возможность инструктору:
- устанавливать в системах уровень жидкостей в танках;
- фиксировать ситуацию на тренажёре;
- управлять командами маневрирования.
Место инструктора имеет телефонную связь с местом обучаемого. Программное обеспечение места инструктора (в сетевой версии) позволяет также наблюдать за показателями места обучаемого:
- системы подачи сигнала тревоги;
- обороты вала;
- регистрация сигналов тревоги.
Тренажёр был создан в соответствии с требованиями конвекции STCW раздел А — 1/12 и конвекции ISM code раздел 6 и раздел 8.
Тренажёр имитирует машинное отделение, в которое вводят два главных среднеоборотных двигателя и три дизель-генератора.
Движительная система включает в себя два главных двигателя, управляющих через редуктор гребным винтом регулируемого шага (ВРШ) Обороты и шаг винта контролируются одновременно.
Тренажёр делится на следующие модули:
- Движительная система (пропульсивная);
- Процессы топливоподачи в СДВСТопливная система;
- Система смазки;
- Система сжатого воздуха;
- Панель управления;
- Осушительная и балластная система;
- Рулевое устройство;
- Противопожарная система;
- Система санитарного водоснабжения;
- Холодильная установка.
Приложение 1. Устройство сигнализации и управления дизелем УСУ-Д-1М ААРЛ. 421451. 001ТУ
Сертифицировано Российским Морским Регистром Судоходства. УСУ-Д-1М-02 на главных и вспомогательных дизелях и дизель-генераторах судов неограниченного района плавания, автоматизированных по 2-ой степени ГОСТ14228-80; УСУ-Д-1М-02 состоит из пультауправления и датчиков контролируемых параметров (датчика оборотов, датчика температуры воды, датчика температуры масла, датчика давления воды, датчика давления масла, датчика протечки топлива).
Пульт управления ПУ-1М-02 является центральным блоком, который управляет работой всех составных частей изделия. Конструктивно пульт управления размешен в металлическом корпусе прямоугольной формы, который устанавливается на дизеле через амортизаторы.
Датчики, входящие в комплект устройства, предназначены для непрерывного контроля соответствующих параметров и устанавливаются непосредственно на дизель.
Обеспечивает:
- непрерывный контроль рабочих параметров дизеля:
- частоты вращения коленчатого вала;
- температуры охлаждающей жидкости (воды);
- давления воды;
- температуры масла в системе смазки;
- давления масла в системе смазки;
- моточасов;
- напряжения аккумуляторной батареи;
- тока в цепи заряда аккумуляторной батареи;
- протечки топлива из трубопроводов высокого давления;
- четырехразрядную цифровую индикацию результатов измерения;
- рабочую и аварийно-предупредительную сигнализацию при превышении параметром дизеля порогового значения;
- выдачу сигналов во внешнюю систему автоматики, замыканием (размыканием) контактов реле при превышении параметром дизеля порогового значения;
- полуавтоматический Техническое обслуживание судового дизеляпуск дизеля.
Комплект поставки:
- пульт управления ПУ-1М-02 ААРЛ.426451.001-02;
- датчик оборотов ДО ААРЛ.433646.001;
- датчик температуры ДТ-1 МААРЛ.433647.001 (2 шт.);
- датчик протечки топлива ДПТ-1 МААРЛ.433645.002;
- преобразователь давления КРТ5-1-1,6 ТУ 4212-174-00227459-99;
- преобразователь давления КРТ5-11-0,4 ТУ 4212-174-00227459-99;
- комплект монтажных частей;
- комплект эксплуатационной документации;
- дополнительно (по согласованию с Заказчиком) может поставляться Сертификат Российского Морского Регистра Судоходства. Допускается раздельная поставка составных частей.
Приложение 2. Датчики-реле температуры ТАМ102
Предназначены для контроля и регулирования температуры жидких и газообразных сред в холодильных установках применяемых на судах морского и речного флота, железнодорожном и автомобильном транспорте а также в стационарных холодильных установках и других системах и устройствах. Модификации ТАМ102-…-05 и ТАМ102-…-07 могут быть использованы для замены реле типа КРМ с датчиком температуры.
Контролируемые среды: хладоны воздух масла, пресная вода и другие среды, неагрессивные к стали, меди, медным сплавам и серебряным припоям.
Для приборов с кожухом контролируемой средой может быть среда, неагрессивная к стали, в том числе аммиак.
Отличаются высокой устойчивостью к динамическим нагрузкам (вибрация, удары, тряска, наклоны), защищенностью от воздействия пыли, воды и других факторов окружающей среды. Степень защиты корпуса — 1Р64.
Предлагается к прочтению: Стационарные двигательные установки малотоннажных судов
Имеют одобрение Морского Регистра России, сертифицированы Регистром Ллойда (Великобритания). Основные технические данные приведены в таблице.
Приложенеие 3. Датчики-реле давления ДЕМ105
Предназначены для контроля и двухпозиционного регулирования давления жидких и газообразных сред в системах сигнализции, защиты и управления дизелей и систем судов, тепловозов, а также в холодильных установках и других системах, в т. ч. для замены реле типа КРМ с датчиком давления.
Контролируемые среды: воздух, хладоны, масла, дизельное топливо, вода. Отличаются высокой устойчивостью к динамическим нагрузкам (вибрация, удары, тряска), защищенностью от воздействия пыли, воды и других факторов окружающей среды. Работоспособны при температуре от минус 60 до плюс 80 °С. Виды климатических исполнений:
- УХЛ2 — для макроклиматических районов с умеренным и холодным климатом;
- 02 — для всех макроклиматических районов на суше;
- ОМ5 — для макроклиматических районов с морским климатом;
- Принципы проектирования конструкций корпуса суднаСтепень защиты корпуса — 1Р64.
Одобрены Морским Регистром России, сертифицированы Регистром Ллойда (Великобритания).
Прибор контроля давления двух, одноканальный ПКД-2, ПКД
Предназначен для автоматического контроля и защиты по давлению различных энергетических и технологических установок и процессов с выдачей световой сигнализации и команды (замыкание или размыкание соответствующих выходных контактов) при достижении контролируемым давлением заданного значения установки срабатывания.
Состоит из электронного блока (БКД) и датчика (или двух датчиков в случае двухканального прибора) давления (ДЦ). Линия связи электронного блока с датчиками (при использовании кабеля или жгута с медными жилами сечением не менее 0,35 мм) — до 50 м.
Степень защиты корпуса — 1Р54 по ГОСТ 14254-80, виброудароустойчивое исполнение.
Приложенеи 4. Приборы контроля частоты вращения ПКЧВ
Предназначен для автоматического контроля частоты вращения элементов транспортных, энергетических, технологических и других установок с выдачей световой сигнализации и команды (замыкание или размыкание соответствующих выходных контактов) при достижении контролируемым параметром заданных значений трех установок срабатывания в диапазоне от 250 до 10 000 мин.
Срабатывание происходит только при повышении контролируемой частоты. Состоит из электронного блока (БКЧВ) и датчика частоты вращения индукционного типа (ДЧВ). Степень защиты корпуса — 1Р54 по ГОСТ 14254-80, вибро-, удароустойчивое исполнение.
Приложение 5. Прибор контроля уровня масла и топлива двух-, одноканальных ПКУ-М-2, ПКУ-М
Предназначен для автоматического контроля и зашиты по уровню масла или топлива различных энергетических и технологических установок и процессов с выдачей световой сигнализации и команды (замыкание или размыкание соответствующих выходных контактов) при достижении контролируемой средой заданного уровня, определяемого местом расположения на объекте датчиков уровня ДУМ.
Состоит из электронного блока (БКУ-М) и датчика уровня (или двух датчиков в случае двухканального прибора). Степень защиты корпуса — 1Р54 по ГОСТ 14254-80, вибро-, ударо-устойчивое исполнение.
Приложение 6
Приложение 7
Приложение 8. Принципиальные схемы некоторых распространенных конструкций регуляторов зарубежных фирм
Схема регулятора «Вудвард UG-8»
Регулятор UG-8 имеет рукоятки настройки следующих основных параметров: неравномерности, задания скоростного режима, установки ограничения нагрузки.
Насос 20 забирает масло из масляной ванны 26 и подает его в аккумуляторы 18 и к золотнику 24 центробежного измерителя 14, соединенному рычагом 16 со штоком 25. Измеритель 14 приводится во вращение через шестерни и валы 15. 22 от вала дизеля. Золотник измерителя 24 управляет подачей масла к сервомотору 27 через каналы а и б. Поршень сервомотора 27 через рычаг 1 передвигает топливную рейку 2, увеличивая или уменьшая подачу топлива на ТНВД клапанного типа с регулированием по началу подачи дизельного топливадизель.
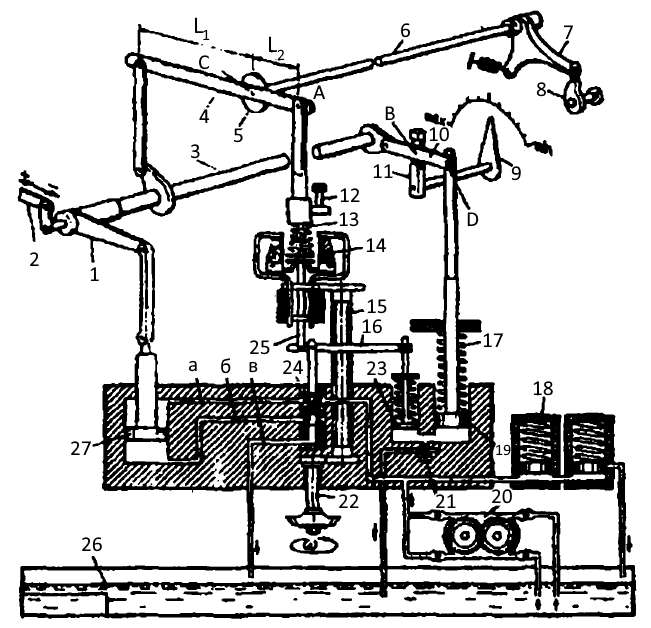
Задание скоростного режима осуществляется изменением предварительного натяжения пружины 13 вращением гайки, которая находится в зацеплении с малой шестерней, вращаемой рукояткой 12 или дистанционно-электрическим мотором синхронизации через фрикционную муфту. Через шток осуществляется воздействие жесткой обратной связи, которая состоит из рычага 4 с изменяемой точкой опоры С на фланце 5, для изменения положения которой служат штанга 6, угловой рычаг 7 и кулачная шайба 8, пружина прижимает угловой рычаг к кулачку. При повороте кулачной шайбы 8 штанга 6 перемещает точку опоры С вдоль рычага 4. Если точка С приближается к точке А вдоль рычага 4, то остаточная неравномерность регулирования уменьшается. При совпадении этих точек остаточная неравномерность равна нулю. Изодромная (гибкая) обратная связь включает рычаг 16, два поршня 19, 23, игольчатый клапан 21, пружину 17, рычаги 10 и 11 и указатель 9. Обратная связь отключается, если точка В совпадает с точкой D. Топливная рейка 2 с указателем фактической нагрузки и механизм ограничения нагрузки действуют от вала 3, присоединенного к штоку сервомотора, который воздействует на золотник измерителя 24 рычага 16.
Регуляторы UG-8 с жесткой и гибкой обратной связью с большой точностью восстанавливают ту частоту вращения, которую дизель имел до изменения нагрузки. Процессы в судовых системах автоматического управления. Особенности настройки регуляторовИзодромная обратная связь дает возможность работать дизелям в параллельном режиме, так как при этом обеспечивается изменение степени неравномерности от нуля до 5-6 %.
Схема регулятора «Вудвард» PGA
Основными элементами регулятора являются: приводной Насос-форсунки с гидроприводоммасляный насос аккумуляторы 2, центробежный ЧЭ (детали 35-37), управляющий золотник (26-28), сервомотор топливоподачи (49-53), изодромная обратная связь (26, 30-4), сервомотор изменения задания частоты вращения (38,39), управляющее устройство дистанционного задания частоты вращения (12-14), устройство ручного изменения частоты вращения 11, стоп-устройство (16, 17), ограничитель топливоподачи по давлению воздуха наддува (3-9, 20), ограничитель топливоподачи по заданной частоте вращения (40-44, 46-48), Бустерный сервомотор (55-57).
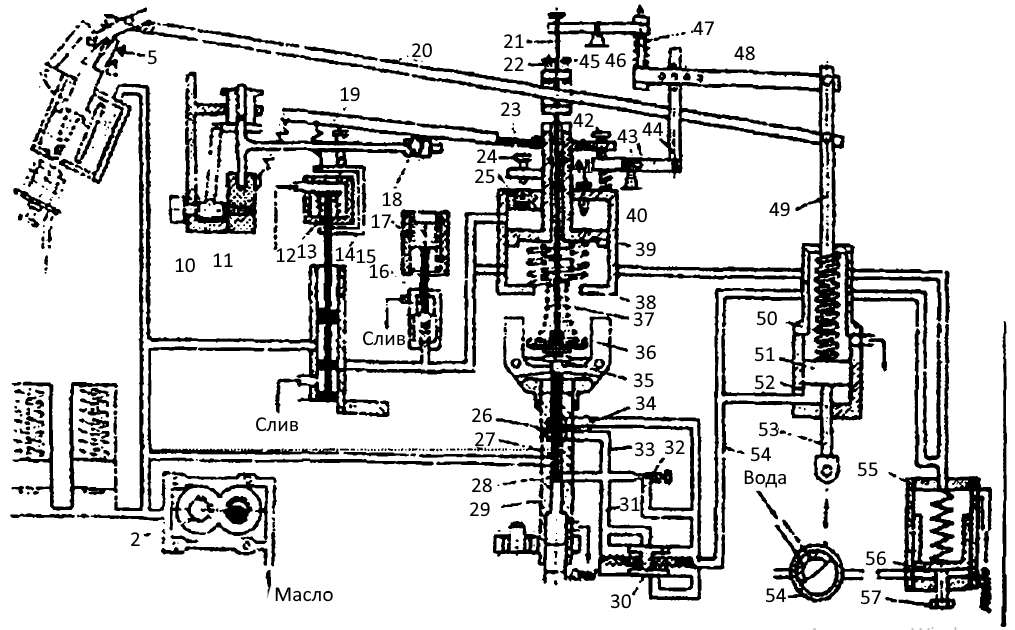
При увеличении нагрузки на двигатель поршень 51 перемещается вверх, одновременно масло также поступает по каналу 33 в нижнюю полость компенсирующего пояска 26 (воспринимающий поршень ГОС) управляющего золотника. Под воздействием перепада давлений на компенсирующем пояске золотник перемещается вверх. В этом проявляется действие отрицательной обратной связи.
Дистанционное задание скоростного режима двигателя из РР осуществляется путем изменения давления управляющего воздуха в полости над сильфоном 12. При задании повышенной частоты вращения двигателя давление управляющего воздуха увеличивается, сильфон сжимается и опускает вниз серьгу 14 с золотником 13. Поле золотника 13 открывает окно во втулке 15 для прохода масла постоянного давления в верхнюю полость сервомотора 38 задания 37.
В регуляторе имеется устройство температурной компенсации изменения геометрических размеров пружины 37 задания в результате изменения температуры окружающей среды, которое представляет собой биметаллическую планку 23 рычага 19.
Бустерный сервомотор 55 обеспечивает включение в действие регулятора в период пуска двигателя. При этом пусковой воздух воздействует на поршень 56, который создает давление масла, поступающего к сервомоторам подачи топлива 52 и задания скоростного режима 38.
Характеристики систем топливоподачиОграничение топливолодачи по давлению воздуха наддува обеспечивает качественное сгорание топлива и бездымный выхлоп двигателя как на установившихся, так и на переходных режимах. Уровень подачи топлива в двигатель ограничивается действием кулака поршня 8 на рычаг 20, который через болт 22 поднимает шток 21 и управляющий золотник 27 вверх.
Схема электронной системы управления впрыскиванием «МАН»
Принцип действия разработанной фирмой МАН системы впрыскивания топлива с электронным управлением заключается в следующем. Из топливной цистерны ТЦ топливо подается насосом ТН в аккумулятор АТ, давление в котором поддерживается в узких пределах. Топливные трубопроводы, ведущие к цилиндрам дизеля, во время работы постоянно заполнены топливом под давлением около 70 МПа. Подача топлива к распылителю форсунки Ф происходит по командам, вырабатываемым блоком управления. Команды подаются при определенных положениях коленчатого вала. Время подачи командных сигналов определяет как момент начала впрыскивания, так и его продолжительность, т. е. количество подаваемого топлива. Форсунка оснащена гидравлическими быстродействующими сервомеханизмами, способными развивать большие усилия. Рабочая жидкость (масло) под давлением 20 МПа из гидравлической системы ГС подается к сервомеханизмам форсунки через управляющий клапан УК.
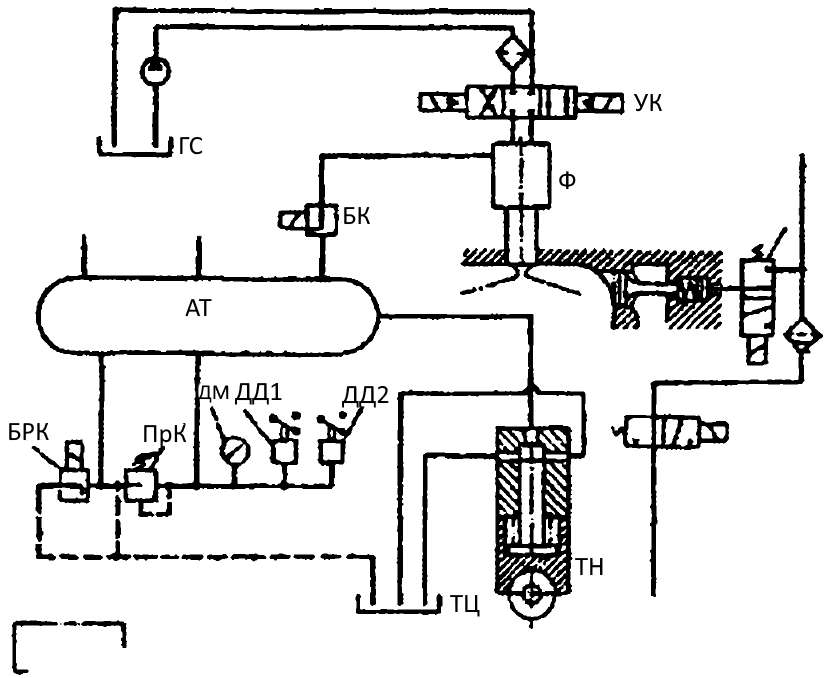
Поскольку функции таймирования и дозирования подачи топлива осуществляются электронным блоком управления, отпадает необходимость в обычных Регулирование ТНВД SKL – NVD 48 и 36ТНВД и распределительном вале, управляющем их работой. Для создания давления топлива в аккумуляторе АТ на дизель устанавливают подкачивающий насос высокого давления, в качестве которого используют 2-3 секции традиционных ТНВД. Давление в аккумуляторе АТ регулируется путем воздействия на золотники насосов, а также с помощью быстродействующего разгрузочного клапана БРК, который при чрезмерном повышении давления сбрасывает избыточное топливо в цистерну ТЦ.
Давление контролируется с помощью дистанционного манометра ДМ, а также двух датчиков давления ДД1 и ДЦ2. В качестве устройств защиты на аккумуляторе АТ установлен предохранительный клапан ПрК, а на топливных трубопроводах каждого цилиндра установлены электромагнитные быстродействующие клапаны БК, при срабатывании которых прекращается подача топлива к форсунке и одновременно полость форсунки перед распылителем сообщается со сливным трубопроводом.
Гидросистема ГС, обеспечивающая подачу масла к сервомеханизмам форсунок, состоит из масляного бака, двух насосов, фильтров, аккумулятора и приборов автоматического управления и контроля. Управление форсункой осуществляется командами от электронного блока управления.
Блок управления выполняет также функции регулятора частоты вращения вала дизеля. Для этого на входы блока подаются сигналы о заданной и действительной частотах вращения. Блок управления сравнивает эти сигналы и в случае их неравенства соответственно изменяет продолжительность впрыскивания, т. е. изменяет количество топлива, подаваемого в цилиндры дизеля.
Автоматически регулируемая аккумуляторная система топливоподачи как эффективный способ снижения и удельного расхода топлива судового дизеля
Увеличение форсировки дизелей по наддуву приводит к росту eNOx. Известный способ снижения eNOx от величины угла опережения подачи топлива φоп: снижение eNOx достигается уменьшением φоп. Однако при этом возрастают удельный Ремонт регуляторов давления, температуры и расхода массы дизеляэффективный расход топлива bе и количество твердых частиц. В конечном счете выбирается компромиссное решение: φоп уменьшается до значения, равного предельным нормам ГОСТ Р51249-99 с соответствующим увеличением bеапр.
Вместе с тем, как показано ниже, имеется возможность применения автоматически регулируемой аккумуляторной системы топливоподачи, позволяющей эффективно решить оба вопроса.
Автоматическое регулирование давления впрыскивания Pапр путем увеличения Pапр позволяет улучшить мелкость распиливания и качество процесса смесеобразования, которые ухудшаются из-за снижения цикловой подачи, частоты вращения и уменьшения φоп.
На частичных режимах, когда плотность заряда в цилиндре дизеля с турбонаддувом снижается, уменьшение Pапр необходимо. Однако это уменьшение должно быть не в столь значительной степени, как это имеет место при стандартных системах топливоподачи.

Автоматическое регулирование φоп с целью уменьшения жесткости процесса и NOx в зависимости от нагрузки и “n” осуществляется путем уменьшения φоп со снижением “n” по сравнению с nном. Повышенное давление впрыскивания при этом обеспечивает сокращение длительности впрыскивания топлива и диффузионной фазы процесса сгорания.
Ниже представлена схема и технические характеристики системы топливоподачи Common Real дизеля фирмы MTU 4 000:
- Система включает: аккумулятор давления, топливный насос высокого давления, который поддерживает высокое давление во всей аккумуляторной системе, включая топливные линии, аккумулятор давления и инжекторные форсунки. Подача топлива осуществляется в нужный момент таковым импульсом, от которого срабатывает в нужное время электромагнитный клапан.
Топливные насосы распределительного типаТопливный насос и форсунки имеют простое устройство, чем, например ЭГНФ, что повышает надежность систем. Топливные шланги имеют двойные стенки с индикацей снижения давления.
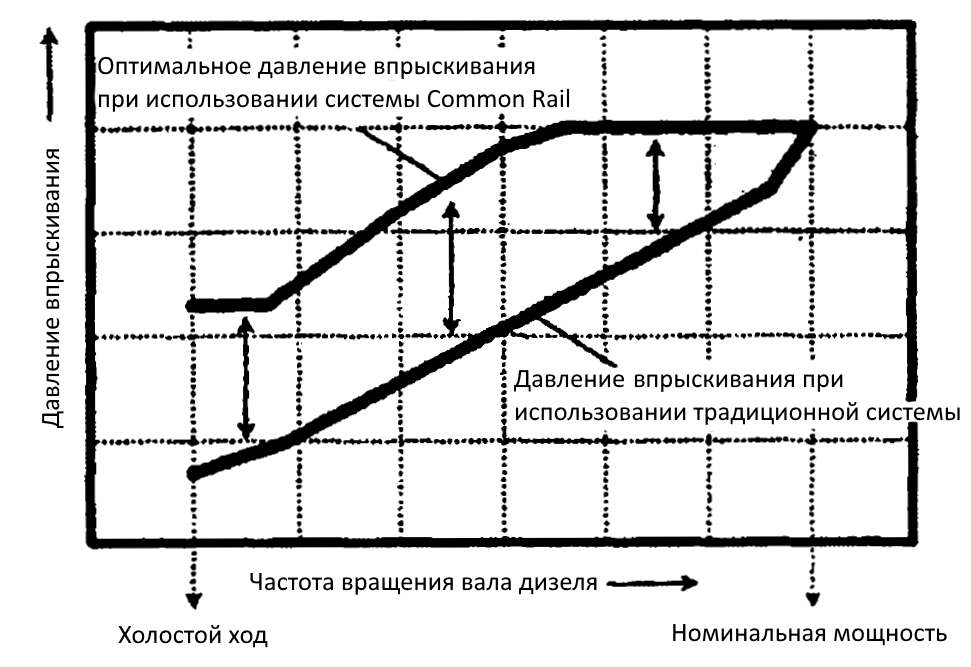
Давление впрыскивания выше, чем в традиционных системах, что обеспечивает повышение экономичности и снижение токсичных выбросов по сравнению с традиционными системами топливоподачи.
Схема пневматического регулятора температуры «Плайгер»
Регулятор «Плайгер». В системах ГД фирмы «Зульцер» применяют пневматические регуляторы температуры «Плайгер». Регулятор состоит из дилатометрического ЧЭ, 2-каскадного усилителя, золотникового клапана с мембранным приводом и устройства ЖОС.
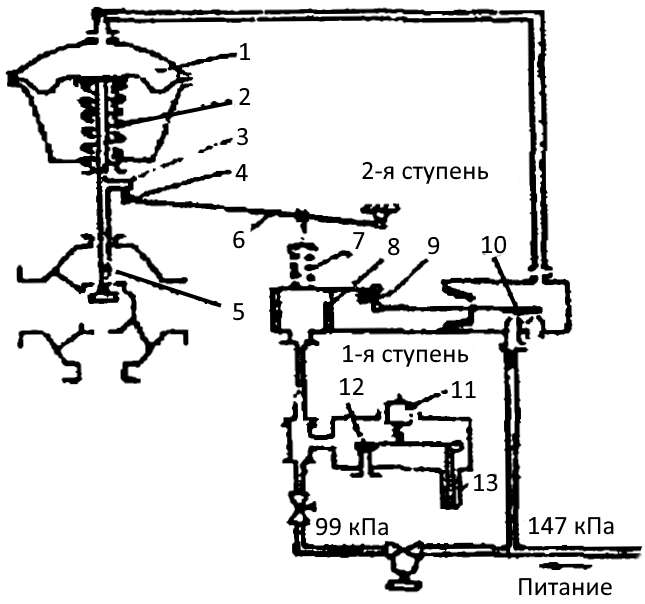
При изменении температуры регулируемой среды дилатометрический чувствительный элемент 13 воздействует на заслонку 12 и изменяет давление воздуха в первой ступени усилителя. В результате этого сильфон 8 рычажной передачей 9 перемещает заслонку 10. Таким образом, сигнал рассогласования между текущим и заданным значениями температур дополнительно усиливается во второй ступени, что вызывает изменение давления воздуха в надмембранной полости привода регулирующего клапана. Благодаря разности усилий давления воздуха и пружины 2 на мембране 1 перемещается клапан 5, который перераспределяет потоки жидкости в охладитель и в обводной трубопровод, восстанавливая заданную температуру. Задание на регуляторе изменяется задающим устройством 11, а коэффициент усиления регулятора — дросселем перед усилителем сопло — заслонка.
Читайте также: Регулирование ТНВД SKL – NVD 48 и 36
Равновесное положение регулирующего клапана 5 зависит от давления воздуха в камере второй ступени усилителя. При этом сопла в ней полностью перекрыты управляющей заслонкой 10. Жесткая обратная связь включает в себя пластину 3 регулирующего клапана, ролик 4, рычаг 6 и пружину 7. Эффект действия обратной связи проявляется в уменьшении сигнала рассогласования на сильфоне 8.
Неравномерность регулирования температуры изменяется в пределах 2-6 °С поджатием или ослаблением пружины обратной связи 7. Требуемый температурный уровень настраивается в диапазоне 10-320 °С. Для питания регулятора используется сжатый воздух давлением 147 кПа.
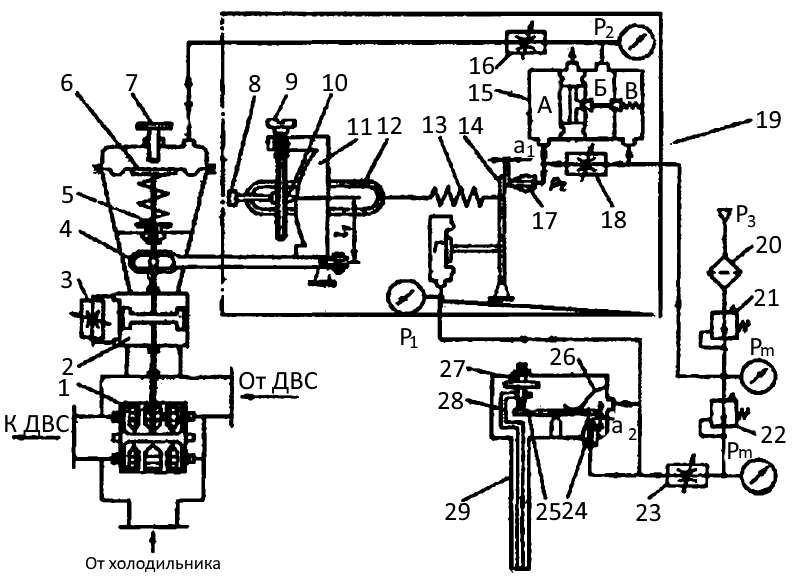
Регулятор температуры «Плайгер»
Увеличение нагрузки двигателя приводит к росту температуры рабочей среды, удлинению трубки 29 датчика, перемещению стержня со скобой 28 и микрометрическим винтом 27. Это приводит к развороту заслонки 25, увеличению зазора α1 снижению давления p1 в камере Г и нарушению равновесия сил, действующих на заслонку 14. Под действием разности сил заслонка разворачивается, возрастает зазор α1 а давление p2 в камере Л усилителя 15 снижается. Нарушается равновесие сил на жестком центре, он отрывается от клапана, и через камеру Б происходит стравливание воздуха в атмосферу из полости ИМ. Нарушается равновесие сил также в ИМ, и золотник 1 через шток пружиной 5 начинает перемещаться вверх, увеличивая подачу рабочей среды от холодильника и уменьшая поток мимо него. По мере движения штока разворачивается рычаг 4. От него через профильный рычаг 11, опору 10, винт 8 и серьгу 12 уменьшается натяжение пружины 13. Равновесие сил на заслонке 14 восстанавливается, ее движение от сопла 17 прекращается и ограничивается снижение давления в полости А блока 15. По мере снижения давления p3 в полости Б до значения P2 в полости А восстанавливается равновесие сил на жестком центре мембраны и он, перемещаясь в обратном направлении, прижимается к клапану. Стравливание воздуха в атмосферу из полости ИМ и движение золотника 7 прекращается.
При снижении температуры рабочей среды ниже заданной направление действия регулятора изменяется на противоположное (работу его звеньев предлагается рассмотреть самостоятельно).
Из изложенного следует, что блок 15 усилителя мощности является астатическим звеном, обеспечивая на установившемся режиме строгое соответствие (с нулевой неравномерностью) давлений p2 и p3. В динамике его задача сводится к управлению значительным потоком воздуха, подаваемого в ИМ или стравливаемого из него. Управление вторым каскадом усиления ведется статическим усилителем первого каскада с малым расходом воздуха.
Введение в первый каскад усиления отрицательной ЖОС позволяет получить строго однозначное (пропорциональное) соответствие между значениями его входного сигнала p1 и положением штока ИМ, а следовательно, и положением m регулирующего органа. При правильной настройке позиционера это соответствие должно описываться статической характеристикой 1.
Приложенеи 9. Пример исследования на ЭВМ влияния параметров регулятора скорости прямого действия с упруго присоединенным катарактом на процесс регулирования дизеля при набросе нагрузки
Дифференциальное уравнение вращающихся масс имеет вид:
где:
- Ta — время Процессы в системе автоматического регулирования скорости дизеля с турбонаддувомразгона дизеля;
- φ — относительное изменение угловой скорости;
- β — коэффициент самовыравнивания. В данном примере принято, что β = 0;
- — момент нагрузки;
- — крутящий момент, где
;
Плунжеры топливных насосов имеют одинаковый скос кромки плунжера, которой дозируется начало или конец подачи топлива.
Поэтому в расчете принимается допущение, что величина цикловой подачи пропорциональна повороту плунжера или ходу рейки топливных насосов.
Введём переменную — координату изменения хода рейки в относительных единицах:
На холостом ходу
,
на номинальном режиме
.
Тогда уравнение (1) примет вид:
Уравнение регулятора скорости прямого действия имеет вид:
где:
- — квадрат времени измерителя скорости;
- Tk — время гидравлического трения;
- δk — временная степень неравномерности;
- ξ — относительная координата положения поршня упруго присоединенного катаракта;
- η — относительная координата положения муфты;
- φ — относительное изменение угловой скорости.
Следует иметь в виду, что Исследования процессов в некоторых судовых системах автоматикирегулятор скорости служит в системе регулирования скорости в виде обратной связи: если частота вращения увеличивается, то цикловая подача топлива должна уменьшаться.
Поэтому μ = -η
Окончательно уравнение регулятора прямого действия можно записать в виде:
Примем, что на холостом ходу μ = 0, φ = 0. Тогда на номинальном установившемся режиме φн = -δст.
Величина δст характеризует наклон статической характеристики системы автоматического регулирования скорости.
Значение
определяет коэффициент усиления регулятора скорости прямого действия.
Уравнение упруго присоединенного катаракта имеет вид:
где:
- — постоянная времени катаракта;
- f — площадь поршенька катаракта;
- cк — жесткость пружины катаракта.
Цель работы – исследовать влияние эксплуатационных и настроечных факторов регулятора скорости на показатели качества переходного процесса дизеля. Этими показателями качества служат: провал (заброс) частоты вращения Δφmax при ступенчатом изменениии нагрузки, длительность переходного процесса тпер — от его начала до момента вхождения частоты вращения в зону нечувствительности ε, расположенную по обе стороны от нового установившегося Ремонт автоматики, регуляторов частоты вращения и систем регулированиязначения частоты вращения после изменения нагрузки.
Согласно требованиям Регистра России для судовых дизель-генераторов:
- тпер < 10 с;
- Δφmax < 0,1;
- ε = ± 0,0025.
Дополнительным показателем качества переходного процесса служат колебательность: число колебаний за период тпер.
Во всех случаях процесс должен быть устойчивым — сходящимся.
К эксплуатационным и настроечным факторам относятся: трение в измерителе, определяемое величиной
которое может изменяться в зависимости от вязкости масла или возникающих помех, приведённая жёсткость пружины Cпр, которая определяется суммарной жёсткостью основной и дополнительной пружин и пружины катаракта.
Причём — первые две определяют наклон статической характеристики δст, а последняя — временная, присоединённая только на короткий отрезок времени, определяемый тем, насколько завёрнута игла катаракта.
На наклон статической характеристики δст катаракт не влияет.
Пояснение к алгоритму программе.
Исходная система путём подстановки
приводится к виду:
Начальные условия соответствуют набросу 100 % нагрузки с холостого хода:
при
решение системы уравнений (6) производится методом Рунге-Кутта.
При решении данной системы уравнений вводятся ограничения на перемещение органа регулировки топливоподачи, а именно – задается упор хода рейки в виде:
Приняты обозначения:
В принятых обозначениях система (6) примет вид:
Решение ищем в виде:
где:
где:
Величина шага по времени принимается М = 0,1, общее время переходного процесса тпер не более 10 с., поэтому число шагов N не более 100.
Вместе с тем для сокращения машинного времени вводится условие: в случае, если одновременно выполняется
то счёт прекращается, так как условно дальнейший процессе в системе автоматического регулирования можно считать установившимся.
Это интересно: Элементы автоматических систем судна
Система уравнений (6) решается в среде Excel.
Для наглядности алгоритм расчета системы уравнений реализован на языке Бейсик.
В строках 10-32 осуществляется ввод исходной информации.
В строках 34-56 осуществляется ввод постоянных величин и начальных условий на печать.
В строках 58-118 производится решение системы дифференциальных уравнений.
Ниже, в качестве примера, представлен результат решения системы уравнений (6) методом Рунге-Кугта.
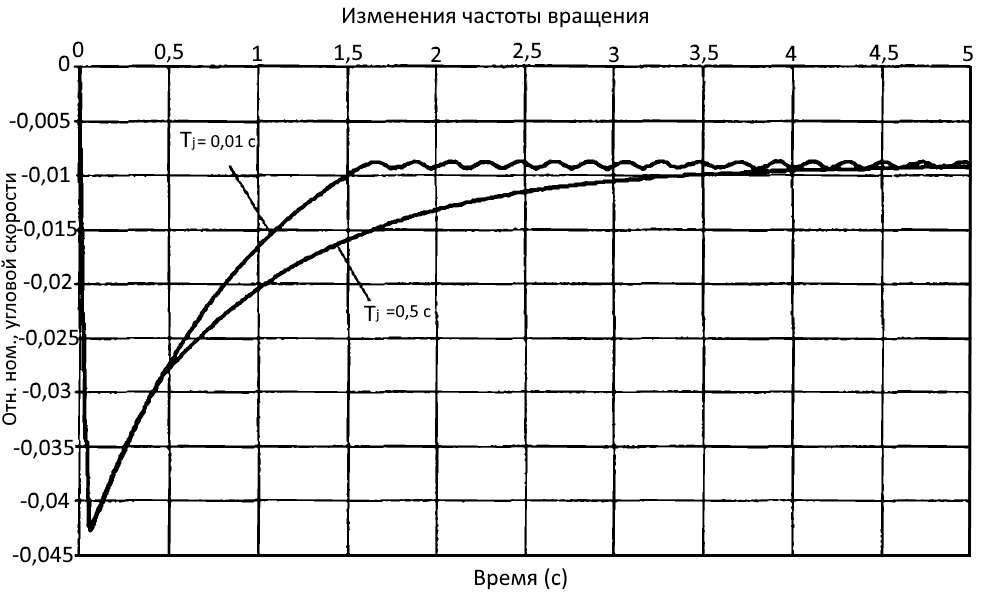
По графику видно, что при увеличении постоянной времени катаракта устойчивость системы возрастает, но и увеличивается длительность переходного процесса.
Приложение 10. Тестовые вопросы по дисциплине “Автоматизация судовых энергетических установок”
- Определите входные и выходные величины уравнения Динамика двигателя судна, условия и оценка работыдинамики дизеля и представьте его передаточную функцию.
- Какие статистические характеристики необходимо рассчитать или получить экспериментально для определения коэффициентов уравнения динамики судового дизеля?
- От чего зависят положение винтовой характеристики и значение мощности сопротивления вращению гребного винта?
- Какие средства автоматизации вспомогательных механизмов и систем определяют знак А2 в символе класса Регистра России?
- Какие способы охлаждения ГД применяют на судах?
- В чем заключаются особенности регулирования температуры в смазочных системах судовых двигателей?
- Какой параметр выбирают в качестве регулируемого в системах охлаждения судовых двигателей?
- На каком уровне поддерживаются значения регулируемых величин в системах охлаждения и смазочной?
- Уравнением, какого вида описываются динамические свойства судового дизеля как объекта регулирования температуры?
- От каких конструктивных параметров зависит постоянная времени судового двигателя как объекта регулирования температуры.
- Какие требования предъявляются к автоматическому регулированию частоты вращения?
- Назовите основные признаки классификации регуляторов частоты вращения.
- Какими конструктивными особенностями характеризуется регулятор прямого действия?
- Для чего предназначены предельные Центр вращения и его перемещениерегуляторы частоты вращения?
- Как изменяется положение регуляторной характеристики при воздействии на пружину задания всережимного регулятора?
- Перечислите типы регуляторов непрямого действия.
- В чем принципиальное отличие в принципе действия гибкой обратной связи от жесткой?
- Какие факторы вызывают нелинейность статистической характеристики чувствительного центробежного элемента?
- Что является причиной возникновения неравномерности частоты вращения и наклона регуляторной характеристики?
- Как определяется устойчивость системы с помощью амплитуднофазового критерия Найквиста?
- Как определяется устойчивость системы с помощью критерия Гурвица?
- Назовите основные показатели качества переходного процесса САР.
- В чем состоит методика расчета переходного процесса с помощью компьютера?
- На каких двигателях преимущественно устанавливают регуляторы прямого действия?
- Перечислите органы настройки регуляторов прямого действия.
- Какие обратные связи имеет регулятор PH – 30? Укажите органы их настройки.
- Как действует ГОС в регуляторе PH – 30? Какое влияние на переходные процессы оказывает орган ее настройки?
- Как осуществляется изменение заданного скоростного режима двигателя с помощью регулятора «Вудвард» PGA?
- В чем заключается принцип действия ограничителя топливоподачи по заданной частоте вращения в регуляторе «Вудвард» PGA? Укажите органы его настройки.
- Как действует ограничитель топливоподачи по давлению воздуха наддува в регуляторе «Вудвард» PGA? Укажите органы его настройки.
- В чем аналогия в действии жесткой и гибкой обратных связей регулятора РН-30?
- Как действует ГОС в регуляторе двигателей Д-50 и Д-100?
- Опишите порядок настройки степени неравномерности в регуляторе Р13М.
- Каковы особенности систем электронного управления впрыскиванием топлива в двигатель?
- С какой целью используются в ГТД регуляторы приемности?
- В чем состоят особенности конструкции и принципа действия насоса-регулятора частоты вращения вала ГТД?
- Чувствительные элементы, каких типов используют в регуляторах температуры?
- Из каких элементов состоят обратные связи регуляторов температуры РТНД и «Плайгер»?
- В чем заключается принцип действия регулятора вязкости VAF- «Вискотерм»?
- В соответствии, с каким законом регулирования работают регуляторы вязкости УАР- «Вискотерм»?
- Какую задачу выполняет регулятор температуры наддувочного воздуха? Опишите порядок его работы, пользуясь схемой.
- Каким образом обеспечить равномерность распределения нагрузки между дизель – генератором при параллельной работе?
- Назначение, устройство и принцип действия регулятора вязкости топлива.





