Маломерные суда на подводных крыльях при ходе на низких или средних скоростях подвержены закону Архимеда и сравнимы с водоизмещающими плавательными средствами, но при убыстрении хода, за счет подъемной силы корпус судна поднимается над водной поверхностью.
- Основные понятия и определения
- Геометрические характеристики подводных крыльев
- Гидродинамические характеристики подводных крыльев
- Основные особенности работы подводных крыльев
- Плотность среды
- Свободная поверхность воды
- Взаимодействие крыльев
- Кавитация подводных крыльев
- Прямоугольные крылья
- Стреловидные крылья
- Стойки крыльев
- Определение основных элементов крыльевого устройства
- Определение площади подводных крыльев
- Выбор конструктивной схемы крыльев
- Особенности обводов корпуса крылатого катера
- Разработка формы профилей крыльев и стоек
- Определение буксировочного сопротивления катеров на подводных крыльях
- Определение сопротивления КПК по результатам ходовых испытаний прототипа
- Определение сопротивления КПК расчетно-теоретическим путем
- Приближенное определение сопротивления КПК
- Пример расчета элементов крыльевого устройства и ГВ
- Расчет элементов гребного винта и скорости катера
На этапе проектирования Малотоннажные суда из армо- и стеклоцементамалотоннажных судов на подводных крыльях учитываются множественные характеристики, которые должны быть обозначены при расчетах и построении паспортных диаграмм.
Основные понятия и определения
Подводное крыло (ПК) по принципу своего действия не отличается от воздушного крыла и представляет собой хорошо спрофилированную несущую поверхность, подъемная сила которой при движении в воде во много раз превосходит силу сопротивления.
Геометрические характеристики подводных крыльев
Как абсолютные значения развивающихся на крыле сил, так и их соотношения зависят от совокупности геометрических элементов крыла — его площади, профилировки сечений, размаха и т. д. Наиболее существенную роль в создании гидродинамических сил играют элементы ПК, приведенные на рис. 1.
Хорда крыла b — отрезок прямой, соединяющий самые удаленные точки входящей и выходящей кромок продольного профиля крыла. Для крыла произвольной в плане формы вычисляется средняя хорда, равная отношению площади проекции крыла S к его размаху l:bср = S/l.
Размах крыла l — расстояние, измеренное между крайними точками крыла в направлении, перпендикулярном его движению.
Удлинение крыла, или относительный размах, — отношение размаха крыла к его средней хорде: λ = l:bср = l²/S.
Крыло, имеющее бесконечно большой размах по сравнению с хордой, называется крылом бесконечного удлинения: λ = ∞.
Абсолютные и относительные значения толщины профиля крыла и кривизны его средней линии определяются точно так же, как и для профиля радиального сечения лопасти ГВ (см. статью “Основные понятия и определения гребных винтов”Гребные винты малотоннажных судов).
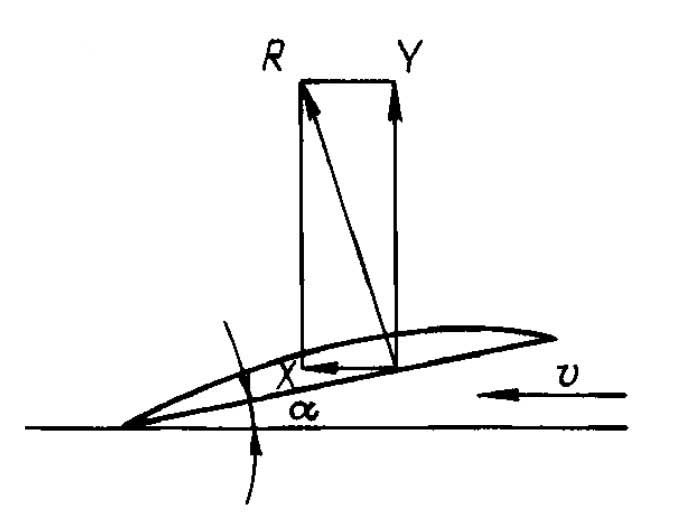
Кромочный угол атаки a — угол между направлением движения крыла и его хордой (рис. 2).
Угол килеватости β (см. рис. 1) — угол между горизонтальной плоскостью и нагнетающей поверхностью крыла в плоскости шпангоута.

Угол стреловидности χ — угол между плоскостью шпангоута и вертикальной плоскостью, проходящей через входящую кромку крыла.
Площадь крыла S — площадь самого крыла, если оно плоское, или площадь проекции крыла в плане, если оно килеватое: S = l bср.
Погружение крыла h — отстояние какой-либо условной точки крыла от уровня невозмущенной свободной поверхности воды. При изучении и проектировании ПК пользуются не абсолютным погружением, а относительным
.
Гидродинамические характеристики подводных крыльев
Подъемная сила Y представляет собой проекцию равнодействующей R всех возникающих на крыле гидродинамических сил на плоскость, перпендикулярную к направлению движения крыла. Проекцию этой же равнодействующей на направление движения называют силой лобового сопротивления X. Эти силы, схематически показанные на рис. 2, обычно выражают следующим образом:
где:
- Cy — коэффициент подъемной силы (КПС);
- Cx — коэффициент сопротивления;
- ν — скорость движения крыла, м/с.
Отношение подъемной силы крыла к величине его сопротивления называется гидродинамическим качеством:
Гидродинамическое качество показывает, во сколько раз подъемная сила крыла больше его сопротивления. Иногда пользуются коэффициентом обратного качества, или удельным сопротивлением:
Наиболее сильное влияние на качество изолированного ПК (без стоек) оказывают его конструктивные элементы (форма профиля, удлинение, относительная толщина и т. д.), угол атаки и глубина погружения. Наличие стоек увеличивает сопротивление крыла и снижает его качество. Максимальных значений гидродинамическое качество крыла достигает в узком диапазоне малых положительных углов атаки — a ≈ 1 ÷ 3°. За пределами этого диапазона, как в одну сторону, так и в другую, качество крыла довольно резко падает.
Типичный график зависимости коэффициентов Cy = f(a), Cx = f(a) и K = f (a) от угла атаки представлен на рис. 3. При малых углах атаки (примерно до a ≈ 10°) наблюдается линейное изменение коэффициента Cy. Затем рост Cy = f(a) замедляется, и после появления срыва потока с верхней поверхности крыла значения Cy резко уменьшаются.
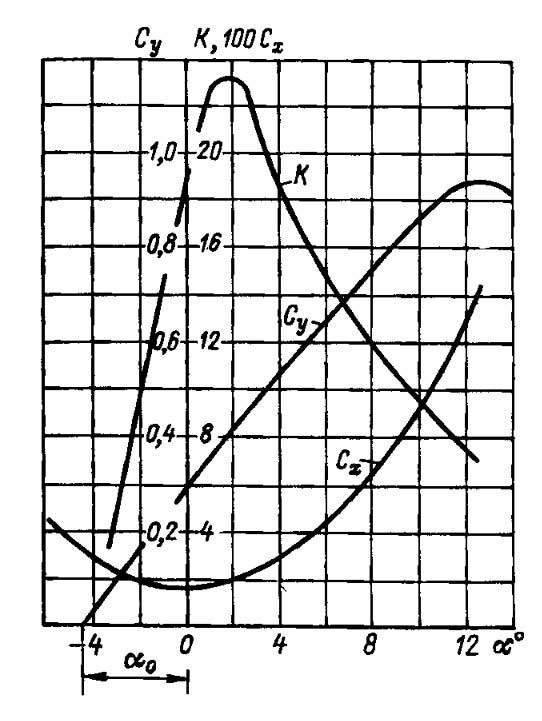
При уменьшении углов атаки крыла a можно найти такое его значение, при котором величина Cy будет равна нулю. Этот угол обозначается a0 и называется углом нулевой подъемной силы (УНПС). У ПК с несимметричным профилем угол a0 имеет отрицательное значение. УНПС является своеобразной характеристикой относительной кривизны средней линии профиля δ0. В идеальной жидкости в радианах и градусах соответственно:
В реальной жидкости при наличии вязкости УНПС несколько меньше теоретических:
При известном угле a0 на прямолинейном участке значение Cy = f(a) можно определить по формуле:
где:
- производная dCy/da = a∞ представляет собой тангенс угла наклона Cy к оси a. Для тонкого крыла в идеальной жидкости a∞ = 2π.
В вязкой жидкости производная Cy по a уменьшается до значения a∞ ≈ 5,5 или a∞ ≈ 0,096 (при a в радианах и градусах соответственно).
Все приведенные формулы в основном относятся к крыльям бесконечного удлинения. Если удлинение крыла уменьшить до конечной величины, то при его обтекании безграничным потоком жидкости вследствие разности давлений на верхней и нижней поверхностях у концов крыла будут наблюдаться перетекание жидкости снизу-вверх и образование свободных или концевых вихрей.
Читайте также: Малые суда парусного типа
Сбегающие с концов крыла вихри вызовут вблизи крыла дополнительные скорости w, перпендикулярные к направлению скорости набегающего потока. Вследствие этого крыло будет обтекаться скошенным на угол △a потоком, имеющим направление и скорость ν1 (рис. 4).
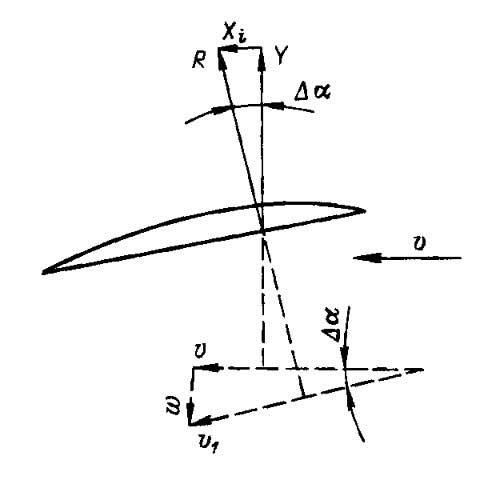
Наличие скоса потока уменьшает фактический угол атаки крыла на величину △a. В результате подъемная сила, направление которой должно быть перпендикулярным к скорости ν1, также отклонится на угол △a. Проекция этой силы на направление скорости ν даст составляющую Xi называемую индуктивным сопротивлением. Вторая составляющая будет представлять собой истинное значение подъемной силы крыла Y относительно потока со скоростью ν.
Индуктивное сопротивление выражается обычно:
Коэффициент индуктивного сопротивления находится по формуле:
Влияние формы крыла в плане на индуктивное сопротивление учитывается коэффициентом μ. Формула показывает, что увеличение удлинения крыла уменьшает его индуктивное сопротивление.
Угол скоса потока △a определяется по выражению:
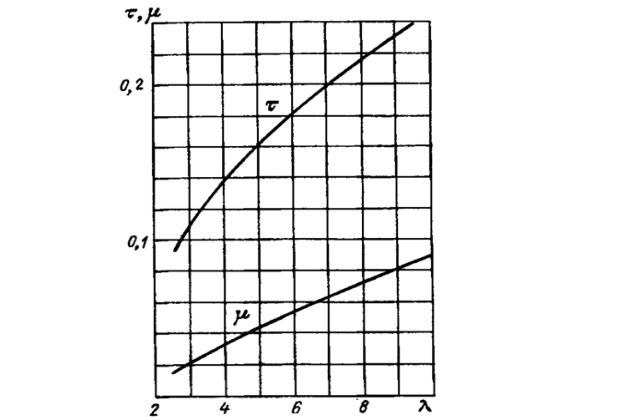
Величина τ учитывает влияние на △a формы крыла в плане.
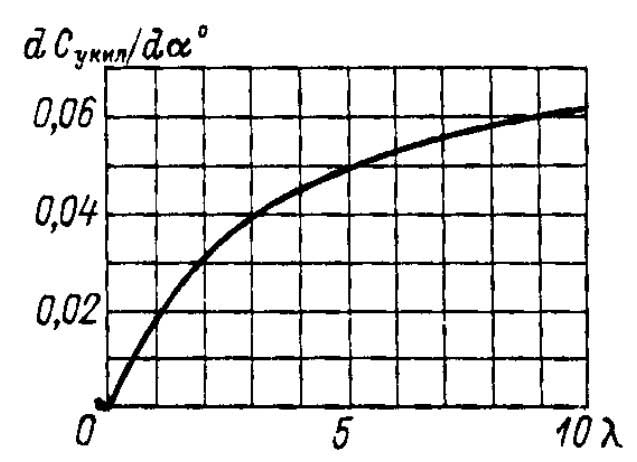
Для эллиптических крыльев, обладающих наименьшими индуктивными потерями, коэффициенты μ и τ равны нулю. Для реальных крыльев, имеющих производную a∞ ≈ 5,5, значения коэффициентов μ и τ могут быть определены по рис. 5.
Основные особенности работы подводных крыльев
Плотность среды
Плотность воды более чем в 800 раз превышает плотность воздуха, находящегося на уровне моря. При этом вода практически несжимаема и плотность ее почти не подвержена изменениям. Плотность же воздуха с увеличением высоты, т. е. с уменьшением давления, быстро падает и на высоте около 10 000 м она уже будет меньше плотности воды в 1 500 раз. Само по себе различие в плотности воздуха и воды на докавитационных режимах движения ПК не создает каких-либо дополнительных гидродинамических проблем. Необходимо только учитывать, что в силу указанного различия в плотности для создания одинаковой подъемной силы при той же скорости движения площадь ПК должна быть примерно в 800—1 000 раз меньше площади воздушного крыла.
Это обстоятельство приводит к весьма большой нагруженности ПК и создает трудности при обеспечении его прочности, а также резко повышает требования к точности изготовления крыла и чистоте обработки его несущих поверхностей. По этой же причине в процессе эксплуатации крылатых судов необходимо постоянно следить, чтобы состояние поверхностей и кромок ПК не ухудшалось из-за появления коррозии, отложения различных осадков или наличия забоин. В противном случае будут снижаться гидродинамическое качество ПК и возрастать сопротивление воды, что затруднит выход судна на крылья и приведет к уменьшению его скорости.
Свободная поверхность воды
Гидродинамические характеристики ПК, движущегося вблизи свободной поверхности воды при глубине погружения, меньшей его хорды, весьма сильно отличаются от характеристик крыла, обтекаемого безграничным потоком. Слой воды, находящийся над малопогруженным крылом, деформируется, и средняя скорость обтекания засасывающей поверхности становится меньше, чем при обтекании этой же поверхности глубокопогруженного крыла. Вследствие этого как разрежение на засасывающей поверхности, так и подъемная сила всего крыла не достигает тех значений, какие они имели бы в безграничном потоке.
При этом близость свободной поверхности воды изменяет обе характеристики, определяющие значение КПС крыла, — как величину его производной по углу атаки
так и величину УНПС a0.
Влияние свободной поверхности воды начинает сказываться с глубин погружения, примерно равных хорде крыла, и с уменьшением их изменение этих характеристик усиливается, вызывая значительное уменьшение подъемной силы. Зависимость подъемной силы от глубины погружения крыла широко используется при практическом проектировании ПК, так как благодаря ей осуществляется саморегулирование подъемной силы при изменении погружения крыла вследствие изменения скорости его обтекания или появления крена.
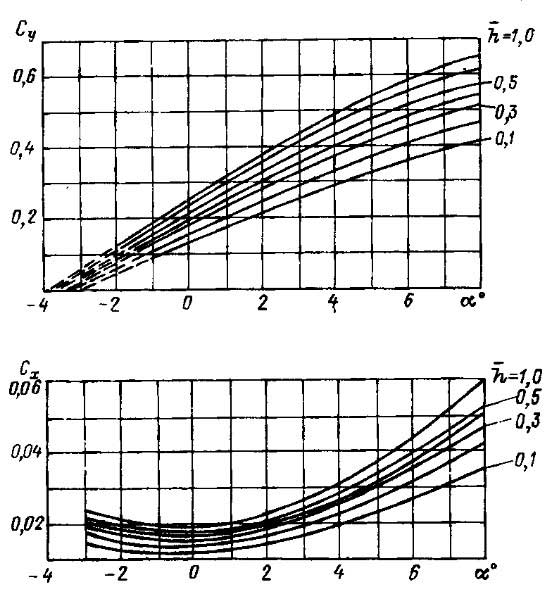
Изменение величин подъемной силы на концах малопогруженного крыла, происходящее при его крене, создает восстанавливающий момент, стремящийся выровнить крыло. Это свойство используется как одно из средств обеспечения остойчивости крылатых судов на ходу. Примерный характер изменения коэффициентов подъемной силы и сопротивления крыла при различных углах атаки в зависимости от глубины его погружения представлен на рис. 6.
Значение КПС малопогруженного крыла может быть найдено по формуле:
где:
представляет собой производную КПС крыла конечного удлинения λ, движущегося под свободной поверхностью воды на относительной глубине погружения
.
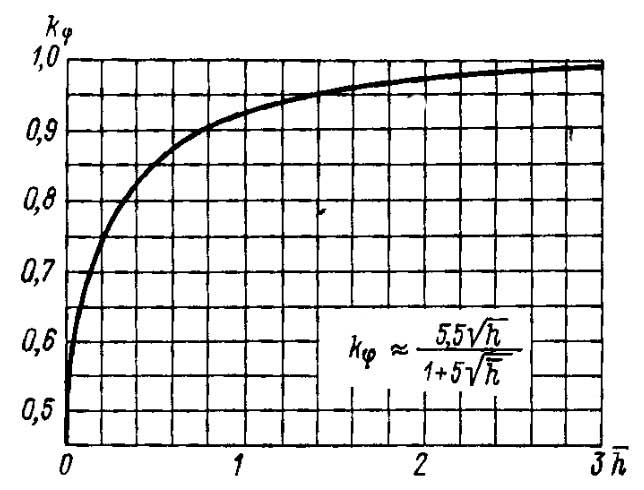
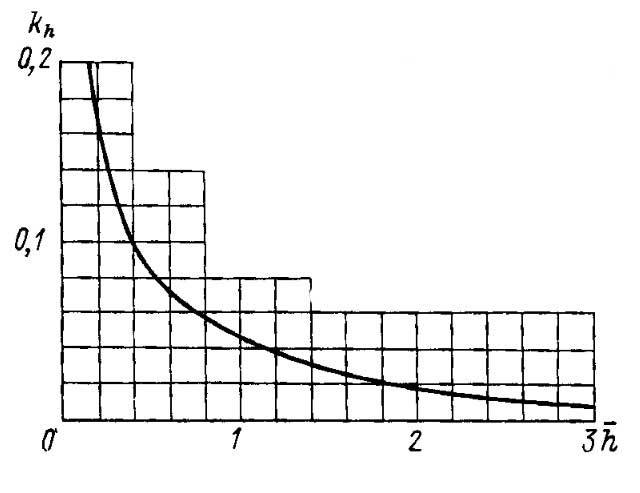
Зависимость kφ = ah∞/a∞ учитывает влияние свободной поверхности воды на производную КПС при бесконечном размахе крыла. Эта зависимость, представленная на рис. 7, может быть выражена формулой:
которая действительна при погружениях крыла
.
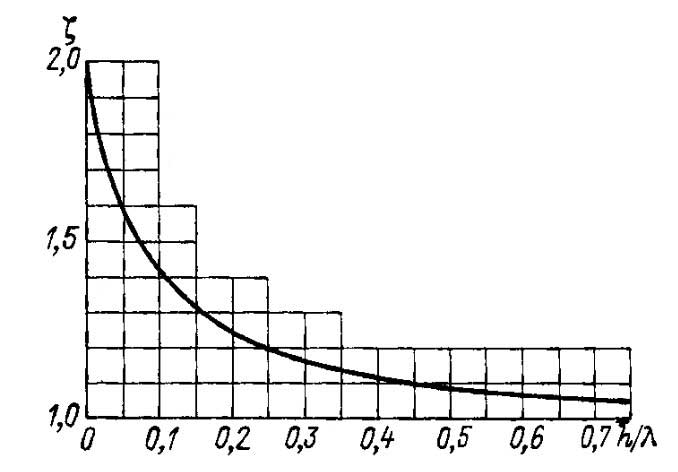
Функция
определяется по рис. 8 и учитывает влияние глубины погружения на индуктивный угол скоса потока.
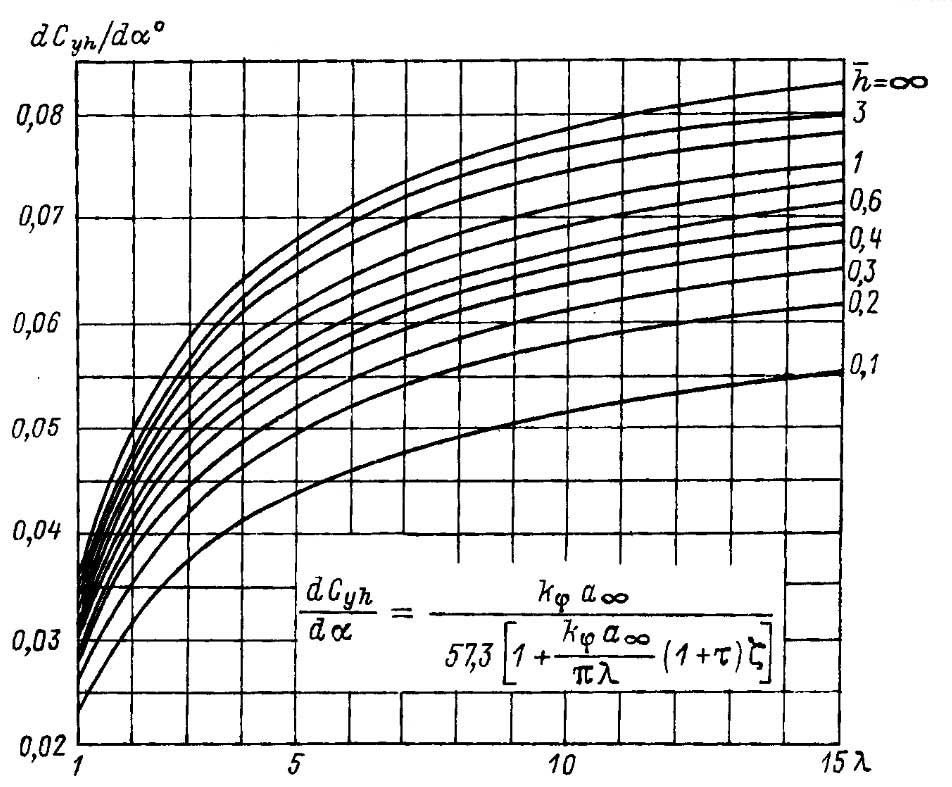
Кривые зависимости производной
от удлинения плоского или малокилеватого (β < 8°) прямоугольного крыла при различных относительных глубинах погружения, полученные по формуле 5, приведены на рис. 9.
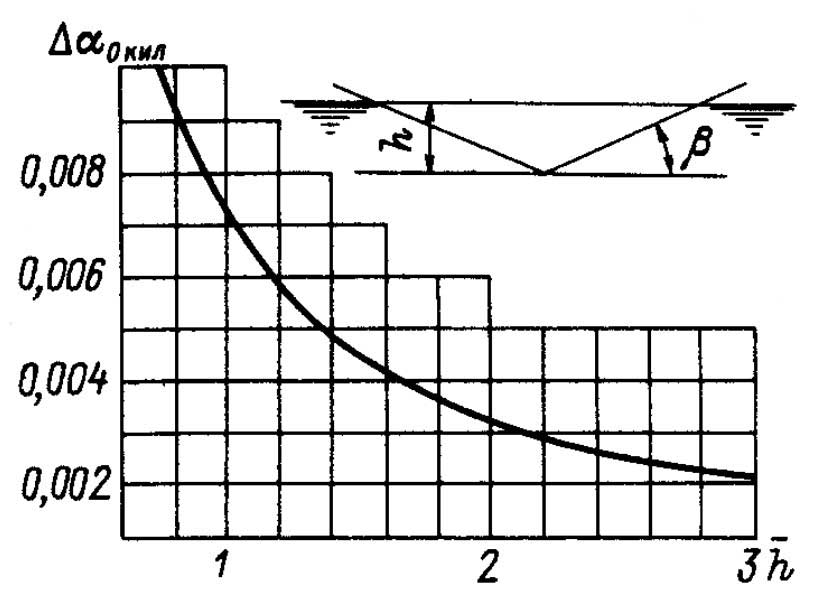
Влияние свободной поверхности воды на изменение угла нулевой подъемной силы ПК зависит от глубины погружения
и относительной толщины крыла δ:
Зависимость
представлена на рис. 10.
Для ПК, имеющих килеватость β = 15 ÷ 30°, КПС находится по формуле:
где:
- — производная КПС килеватого крыла, определяемая по рис. 11.
Влияние глубины погружения килеватого крыла на УНПС
показано на рис. 12.
Рассмотренное влияние свободной поверхности воды на гидродинамические характеристики ПК относится только к их устойчивому обтеканию.
В действительности следует считаться с возможностью неустойчивого обтекания, являющегося следствием проникновения атмосферного воздуха на засасывающую поверхность крыла. При этом разрежение на ней снимается и устанавливается атмосферное давление. Это явление обычно сопровождается срывом потока с засасывающей поверхности и ее оголением.
Поскольку большая часть подъемной силы крыла создается именно засасывающей стороной, то при попадании на нее воздуха подъемная сила крыла мгновенно уменьшается почти в два раза, и оно проваливается. После погружения в воду подъемная сила крыла восстанавливается, и оно опять начинает всплывать, приближаясь к свободной поверхности воды. И если своевременно не будут предприняты специальные меры, то описанное явление будет периодически повторяться, вызывая неустойчивость движения судна.
Атмосферный воздух может попадать на крылья различными путями: непосредственно со свободной поверхности воды при недостаточном заглублении крыла, по вихревым шнурам, сбегающим с крыла и замыкающимся на свободную поверхность, по наклонным стабилизаторам и стойкам, пересекающим свободную поверхность воды и крепящим крылья к корпусу судна.
При проектировании ПК стремятся обеспечить такое их погружение, при котором атмосферный воздух не проникал бы к крыльям и не изменял бы их гидродинамических характеристик.
На наклонных стабилизаторах для этой же цели устанавливают специальные шайбы, препятствующие доступу воздуха на засасывающую поверхность, стойки делают по возможности тонкими и т. д.
Взаимодействие крыльев
Носовое крыло оказывает существенное влияние на гидродинамические характеристики кормового. Создаваемый носовым крылом поток имеет форму корытообразной впадины с плоским основанием и крутыми стенками. Продольное сечение этой впадины имеет характер полуволны. По мере удаления от носового крыла впадина постепенно сужается и ее стенки смыкаются.
Будет интересно: Портативные лодки малого типа
Однако происходит это на расстоянии, значительно превышающем расстояние между крыльями, и кормовое крыло обычно находится в развитой части впадины, вследствие чего оно погружено глубже относительно невозмущенной свободной поверхности воды, чем носовое. Такое положение кормового крыла создает дополнительный дифферент, увеличивающий углы атаки обоих крыльев, что должно учитываться при их проектировании.
Вместе с тем отходящий от носового крыла скошенный поток обычно уменьшает угол атаки кормового крыла. Учет угла скоса потока за носовым крылом приводит к уменьшению КПС кормового крыла Cy к.т в системе тандем и к увеличению сопротивления Cx к.т:
где:
- Cyк, Cxк коэффициенты подъемной силы и сопротивления изолированного кормового крыла.
Величина △aт представляет собой угол скоса потока за носовым крылом в месте расположения кормового крыла. Максимальная величина этого угла при больших числах Фруда:
Влияние угла скоса необходимо учитывать главным образом в том случае, когда расстояние между крыльями меньше половины длины волновой впадины. Если это расстояние превышает половину длины впадины, влияние угла скоса потока будет положительным, и при расчете сопротивления крыла, допуская погрешность в безопасную сторону, его можно не учитывать.

При положении крыла посредине волновой впадины или на ее конце угол атаки кормового крыла вообще изменяться не будет. Для определения длины волновой впадины, измеряемой от передней кромки носового крыла, можно пользоваться рис. 13 или приближенной формулой:
где:
- — числа Фруда по хорде b и по размаху носового крыла l соответственно.
Приближенное значение наибольшей ординаты волновой впадины, отнесенной к хорде носового крыла, может быть найдено по рис. 14 или по формуле
Кавитация подводных крыльев
Прямоугольные крылья
При проектировании ПК должно быть обращено особое внимание на обеспечение отсутствия кавитации, возникающей при увеличении скорости обтекания крыла и понижении давления на его засасывающей поверхности. Как и у ГВ, критерием подобия кавитации ПК является безразмерное число кавитации, выражаемое формулой Гребные винты малотоннажных судов“Определение числа кавитации”, в которой глубина погружения оси винта заменена глубиной погружения крыла. Число кавитации, соответствующее моменту наступления кавитации ПК, называют критическим числом кавитации κкр. При развитой, так называемой второй стадии кавитации, давление на всей засасывающей поверхности крыла достигает своего наименьшего значения, равного давлению насыщенных паров воды Pd.
Дальнейшее увеличение разрежения на крыле становится невозможным. По этой причине рост подъемной силы при увеличении скорости обтекания крыла будет происходить только за счет повышения давления на его нагнетающей поверхности, т. е. значительно медленнее.
Сопротивление же кавитирующего ПК, несмотря на некоторое снижение сопротивления трения, будет увеличиваться по-прежнему пропорционально квадрату скорости движения, так как в целом коэффициент профильного сопротивления крыла из-за наличия кавитационных каверн несколько возрастает. В результате действия обоих указанных факторов гидродинамическое качество кавитирующего ПК будет заметно ниже, чем некавитирующего.
Предлагается к прочтению: Определение корпусных характеристик в момент взаимодействия судна с водной поверхностью
У крыльев, движущихся вблизи свободной поверхности воды, помимо снижения качества кавитации облегчает прорыв воздуха на засасывающую поверхность, вызывая провалы крыльев и неустойчивость движения судна. К тому же кавитирующие малопогруженные ПК теряют свое самое главное положительное качество — возможность автоматической стабилизации положения относительно уровня воды, так как при приближении к свободной поверхности подъемная сила крыльев не будет уменьшаться. Таким образом, проектирование кавитирующих ПК не может быть признано целесообразным. В связи с этим весьма важным является изыскание способов предотвращения кавитации, а также определение моментов ее наступления для различных типов крыльев.
Приближенное значение критического числа кавитации для глубокопогруженного крыла бесконечного размаха можно найти по формуле:
Для малопогруженного крыла конечного удлинения с неравномерным распределением подъемной силы по размаху данная формула примет вид:
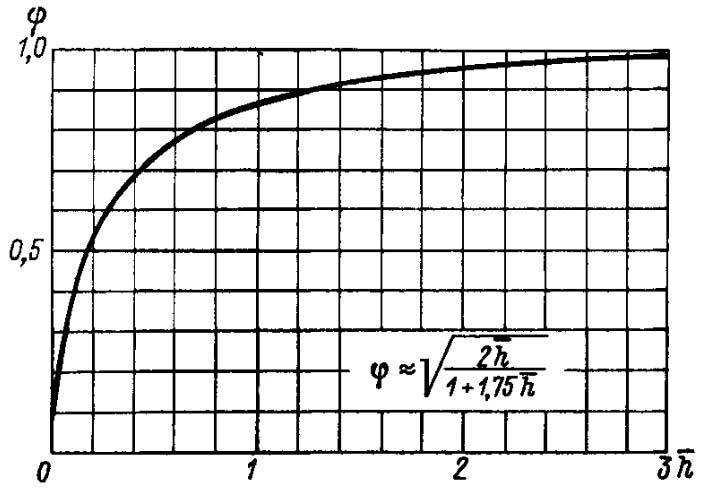
Коэффициент φ характеризует изменение разрежения на засасывающей поверхности крыла ξh при уменьшении глубины его погружения по сравнению с разрежением в той же точке крыла ξ∞ при его обтекании безграничным потоком. Значение коэффициента φ определяют по рис. 15 или находят по формуле:
Поскольку при приближении к свободной поверхности давление на засасывающей стороне ПК повышается, антикавитационные качества малопогруженных крыльев улучшаются и кавитация наступает на более высоких скоростях судна.
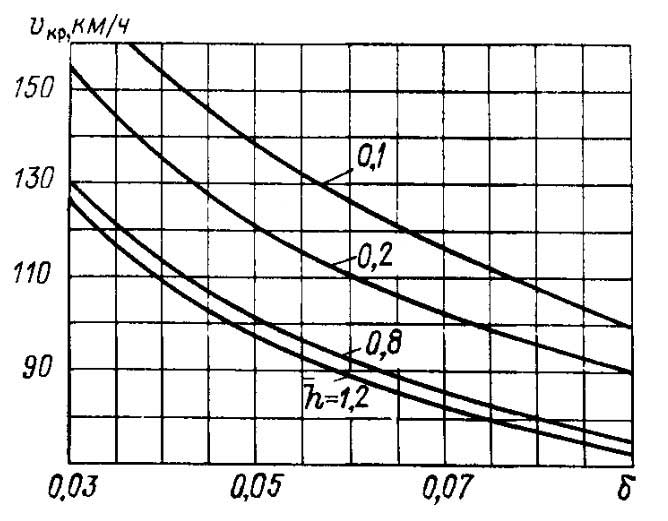
Скорость потока νкр, при которой начинается кавитация на засасывающей поверхности ПК, называется критической. Для ее определения при известных основных характеристиках прямоугольного ПК, движущегося на глубине h под свободной поверхностью воды, могут быть использованы приближенные формулы:
или:
Формула 13 и соответствующий ей рис. 16 дают несколько меньшее значение критической скорости, так как они получены для Cy = 0,25. При уменьшении Cy критическая скорость возрастает. Увеличение скорости бескавитационного обтекания ПК может быть также достигнуто уменьшением относительной толщины профиля крыла δ и относительной глубины погружения
.
Относительная толщина некавитирующих прямоугольных ПК чаще всего составляет δ ≈ 0,06 ÷ 0,08. С повышением скорости во избежание появления кавитации δ приходится понижать до ≈ 0,04 ÷ 0,05. Допустимую по условию отсутствия кавитации относительную толщину профиля крыла при известной скорости судна ν можно получить на основании формул 13 и 14 или по рис. 16. Полученная толщина ПК должна быть обязательно проверена на прочность.
Имеющиеся в настоящее время материалы позволяют обеспечить необходимую прочность крыльев при δ ≈ 0,04. Это обстоятельство ограничивает возможность применения глубокопогруженных некавитирующих прямоугольных ПК до скоростей около 110 км/ч. Вместе с этим не следует уменьшать толщину крыльев более, чем это требуется по условию отсутствия кавитации, так как тонкие крылья имеют уменьшенный диапазон углов бескавитационного обтекания и соответственно худшую мореходность.
Уменьшением глубины погружения для предотвращения кавитации ПК также следует пользоваться с осторожностью, так как при этом резко возрастает вероятность прорыва атмосферного воздуха на засасывающую поверхность крыльев, в особенности при волнении. Поэтому принимать погружение крыльев меньше чем 0,2 b не рекомендуется. Обычно же глубина погружения плоских малопогруженных ПК h = (0,2÷0,4)b.
При дальнейшем увеличении погружения влияние свободной поверхности воды на подъемную силу ПК будет ослабевать, что может затруднить обеспечение поперечной и продольной устойчивости хода судна. Малопогруженные ПК могут применяться до скоростей движения судна ~ 150 км/ч, т. е. уменьшение глубины погружения крыльев позволяет отодвинуть границу наступления кавитации примерно на 40 км/ч.
Условие отсутствия кавитации ПК на всех режимах движения катера накладывает серьезные ограничения на Cy, поскольку его значения непосредственно связаны с величиной разрежения на засасывающей поверхности крыла. При умеренных скоростях 50-60 км/ч для малопогруженных ПК принимают Cy = 0,2 ÷ 0,3. При этих значениях Cy, соответствующих углам атаки крыльев около 2—3°, гидродинамическое качество ПК становится близким к максимальному.
С увеличением скорости до 100—150 км/ч допустимые значения КПС снижаются до Cy ≈ 0,1 ÷ 0,2, а углы атаки — до 0,5—1°. Вместе с тем, устанавливая рабочие значения КПС и углов атаки ПК, необходимо иметь в виду, что их чрезмерное уменьшение сопряжено с отрицательными последствиями, так как делает крылья слишком чувствительными к изменениям глубины погружения или угла атаки. Как показывают исследования, изменения углов атаки ПК в условиях волнения могут превышать ± 1,5°. Вследствие этого при углах атаки порядка 1° подъемная сила крыла на ходу будет изменяться в 1,5—2 раза и поведение судна резко ухудшится. Очевидно, такие же изменения углов атаки крыла при больших значениях коэффициента Cy будут отражаться на поведении судна не так сильно.
Стреловидные крылья
Приведенные способы отдаления момента наступления кавитации путем уменьшения КПС, относительных толщин и глубин погружений прямоугольных ПК влекут за собой некоторое ухудшение мореходности судна. Поэтому в качестве весьма эффективного средства предотвращения кавитации, не только не снижающего, а даже повышающего мореходность судов, можно рекомендовать применение стреловидных крыльев, схема обтекания которых представлена на рис. 17.
Каждую половину стреловидного крыла можно рассматривать как скользящее крыло, число кавитации и критическая скорость которого определяются на основании соотношений
и
Формулы показывают, что по сравнению с прямоугольным крылом скорость бескавитационного обтекания скользящего крыла возрастает.
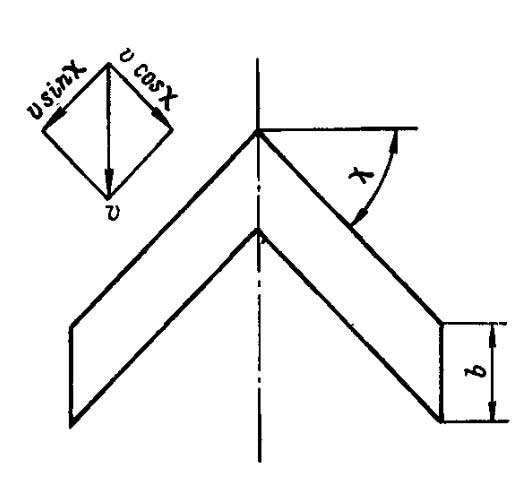
У стреловидного крыла указанное свойство используется не полностью, так как в месте соединения двух половинок крыла эффект скольжения заметно ослабевает. Поэтому при расчете характеристик стреловидного крыла обычно исходят из средней скорости обтекания
.
При практическом проектировании ПК углы стреловидности чаще всего находятся в пределах 25—45°, что позволяет повысить скорость бескавитационного обтекания крыльев на 10-15 %.
Благоприятное влияние стреловидности на характеристики ПК не исчерпывается отдалением момента возникновения кавитации. Исследования показывают, что наличие стреловидности позволяет улучшить маневренные качества КПК. При совершении циркуляций вследствие появления дрейфа обтекание стреловидного крыла становится несимметричным — угол скольжения внутренней половины крыла возрастает, а наружной половины уменьшается. Благодаря этому изменяется подъемная сила каждой половины крыла, и возникают моменты, способствующие образованию внутренних кренов и улучшению остойчивости крылатых судов на циркуляции.
Придание крыльям стреловидности несколько улучшает также мореходные качества КПК. Производные КПС стреловидного крыла и соответствующего прямоугольного крыла, имеющего одинаковый с ним профиль нормального сечения, связаны между собой зависимостью:
из которой следует, что с увеличением угла стреловидности наклон кривой Cy уменьшается, вследствие чего стреловидное крыло становится менее чувствительным к изменениям углов атаки, происходящим при движении на волнении. Кроме того, большая протяженность стреловидного крыла в направлении движения увеличивает время прохождения крыла через волну, что снижает ударные перегрузки КПК в целом.
Отдаление момента наступления кавитации стреловидных крыльев позволяет сделать их относительно более толстыми, что дает возможность увеличить диапазон углов их бескавитационного обтекания и положительно отражается на мореходных качествах КПК. Дополнительно, в качестве одного из эксплуатационных преимуществ, следует отметить, что наличие стреловидности позволяет смягчать удары крыла о различные плавающие предметы и способствует их соскальзыванию с крыльев.
Стойки крыльев
Кавитация стоек, соединяющих крылья с корпусом судна, также весьма нежелательна, так как она приводит к увеличению общего сопротивления крыльевого устройства и облегчает проникновение атмосферного воздуха к засасывающей поверхности крыльев. Для стоек ПК обычно используются тонкие симметричные профили, критическое число кавитации которых может быть определено по формуле Гребные винты малотоннажных судов“Определение относительной толщины профиля колонок” по известной относительной толщине стойки δ. Соответствующая критическая скорость начала кавитации стоек крыльев находится по выражению:
Критическая скорость стоек весьма чувствительна к несимметричному обтеканию. При движении стоек с углом атаки всего 1° (вследствие неправильной установки или дрейфа) критическая скорость начала кавитации уменьшается на ~ 10 %.
Определение основных элементов крыльевого устройства
Классификация Строение судна на подводных крыльяхподводных крыльев может производиться по различным признакам. Наиболее общей и целесообразной представляется классификация ПК по принципу сохранения постоянства подъемной силы при различных скоростях судна. Постоянство подъемной силы является необходимым условием обеспечения устойчивого движения КПК, так как при любой установившейся скорости подъемная сила, возникающая на крыльях, должна быть равна весу катера. Рассмотрение общей формулы подъемной силы ПК (Формула 1) показывает, что с увеличением скорости она будет возрастать и в определенный момент, если не принять специальных конструктивных мер, превысит вес катера. Вследствие этого крылья начнут всплывать и глубина их погружения уменьшится.

а, б – плоское малопогруженное; в, г – V-образное; д, е – раздельно стоящее; ж – к – комбинированное
При этом корпус катера, жестко связанный с крыльями, будет подниматься над водой до тех пор, пока из-за прорыва воздуха на засасывающую поверхность крыльев не произойдет резкого падения подъемной силы и движение перестанет быть устойчивым.
Рекомендуется к прочтению: Гидродинамические силы, влияющие на рулевое устройство малотоннажного судна
В зависимости от способа поддержания постоянства подъемной силы при различных скоростях обтекания все ПК, не имеющие автоматического управления, могут быть разделены на следующие конструктивные типы:
- I – плоские малопогруженные крылья;
- II – килеватые V-образные и трапециевидные крылья, пересекающие свободную поверхность воды;
- III – этажерочные крылья, имеющие несколько несущих плоскостей, расположеныых одна над другой, часто с различными углами атаки.
Постоянство подъемной силы у ПК I типа поддерживается за счет влияния свободной поверхности воды, так как с изменением скорости катера будет изменяться глубина погружения крыльев и подъемная сила автоматически сохранит свою величину. У II и III типов крыльев необходимая величина подъемной силы при увеличении скорости судна обеспечивается за счет выхода из воды излишних площадей крыльев. Однако приведенная классификация ПК весьма условна, так как в чистом виде ни один тип крыльев практического применения почти не находит.
а – эллиптическое; б — прямоугольное; в – стреловидное; г – стреловидное разрезное; д – трапециевидное.
I — плоские малопогруженные крылья; II — килеватые V-образные и трапециевидные крылья, пересекающие свободную поверхность воды; III — этажерочные крылья, имеющие несколько несущих плоскостей, расположенных одна над другой, часто с различными углами атаки
Обычно при проектировании реальных крыльевых устройств с целью более оптимального решения поставленных задач используется та или иная комбинация, составленная из различных плоских, наклонных и этажерочных элементов крыльев. На рис. 18 и 19 приведено несколько наиболее распространенных крыльевых схем, в том числе и комбинированных.
В процессе проектирования ПК должны быть решены следующие задачи:
- установлена целесообразность применения на судне ПК и выбрана принципиальная схема крыльевого устройства;
- определены необходимые площади ПК и места их расположения;
- разработана конструктивная схема крыльев и выбраны размеры всех плоскостей и стоек;
- выбрана профилировка ПК, стабилизаторов и стоек;
- произведены необходимые гидродинамические расчеты, связанные с определением нагрузки на крылья, с определением сопротивления воды и скорости КПК на различных режимах работы двигателя и т. д.;
- выбран материал ПК и разработаны их рабочие чертежи с учетом обеспечения необходимой прочности.
Целесообразность применения ПК определяется главным образом величиной максимальной скорости катера при заданных значениях его водоизмещения и мощности двигателя. ПК следует устанавливать, если ожидаемая скорость катера будет не менее:
где:
- V — объемное водоизмещение катера, м³.
При меньших скоростях ПК существенной пользы принести не могут, так как гидродинамические силы на них будут малы и катер на крылья полностью не выйдет. В начальной стадии проектирования ориентировочное значение наибольшей скорости КПК, м/с, при заданном его водоизмещении Vγ и располагаемой мощности двигателя Ne может быть определено по формуле:
или, км/ч,
Поскольку в начале проектирования сопротивление судна R = Vγ/K очень редко бывает известно, то для оценки ожидаемой скорости КПК пользуются так называемым коэффициентом пропульсивного качества, представляющим собой произведение гидродинамического качества судна K = Vγ/R на пропульсивный коэффициент η = Peν/Ne:
Среднестатистические кривые пропульсивного качества крылатых катеров (двукрылых и однокрылых) и глиссирующих (реданных и безреданных) в зависимости от Сопротивление движению малого судначисла Фруда по водоизмещению FrV приведены на рис. 20. С их помощью, определив число FrV, а также соответствующее ему значение пропульсивного качества Kη реданного или безреданного катера и переходя с исходной кривой 3 или 4 на кривые 1 или 2 (параллельно пунктирной линии a-a), можно ориентировочно оценить увеличение скорости и пропульсивного качества глиссирующих катеров при установке на них одного или двух ПК.
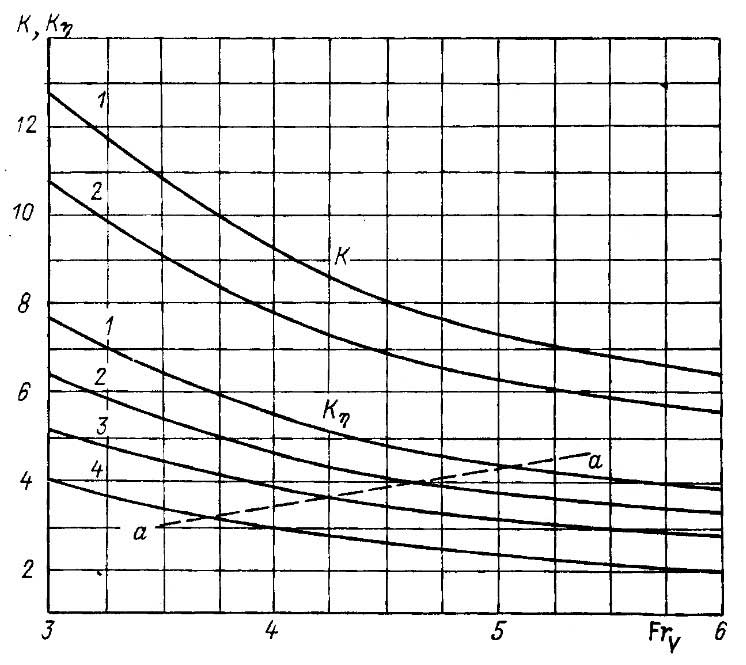
1 – двукрылых; 2 – однокрылых; 3 – реданных; 4 – безреданных
Вместе с этим следует иметь в виду, что при определении наибольшей скорости КПК по формулам (18-20) значения пропульсивного коэффициента η и коэффициента гидродинамического качества K, входящие в пропульсивное качество, могут быть найдены независимо друг от друга. Кривые изменения гидродинамического качества K одно и двукрылых катеров в зависимости от числа FrV. Также представлены на рис. 20. Для определения гидродинамического качества в зависимости от водоизмещения катера и его скорости может быть также использован рис. 21.

1 – двукрылых; 2 – однокрылых; 3 – реданных; 4 – безреданных
Кривые
выражают физически очевидное обстоятельство неизбежного уменьшения гидродинамического качества глиссирующих и крылатых катеров с ростом их скорости.
Будет интересно: Управляемость малого судна
Происходит это потому, что в отношении Vγ/R, характеризующем качество быстроходного судна, числитель (подъемная сила днища или крыльев, равная водоизмещению судна) для обеспечения устойчивого движения с увеличением скорости не должен изменяться, а знаменатель (сопротивление корпуса или крыльев с выступающими частями) постепенно возрастает.
Пропульсивный коэффициент η, характеризующий эффективность использования мощности двигателей, установленных на судне, при оценке наибольшей скорости по формулам (18-20) принимают равным 0,55-0,60. Более точно значение η может быть установлено на основании предварительных расчетов ходкости судна, выполненных в соответствии с рекомендациями статьи Гребные винты малотоннажных судов“Расчет гребных винтов судов малого размерения”.
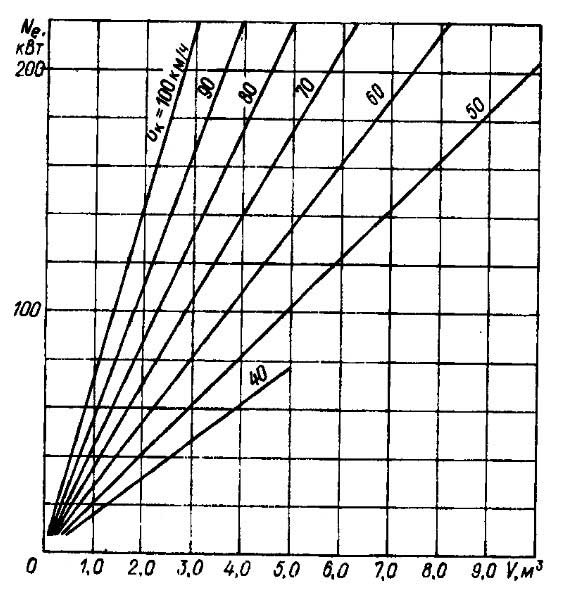
Показателем эффективности использования мощности двигателей при проектировании КПК служит величина удельной мощности на 1 т водоизмещения
. Чем меньше удельная мощность на заданной скорости, тем лучше спроектировано судно, тем меньше оно будет расходовать топлива. Статистические кривые, охватывающие разброс значений удельной мощности многих построенных КПК, приведены на рис. 22. Данные кривые показывают, что при скорости КПК, превышающей 80 км/ч, удельная мощность начинает резко возрастать.
Для предварительного приближенного определения мощности двигателя, необходимой для достижения КПК заданной скорости, может быть использована формула:
а также кривые:
приведенные на рис. 22:
Для непосредственного определения наибольшей достижимой скорости проектируемого КПК по заданным значениям его водоизмещения и мощности двигателя может быть использована диаграмма, представленная на рис. 23. Диаграмма построена на основании анализа и осреднения результатов скоростных испытаний многих отечественных и зарубежных КПК и в большинстве случаев обеспечивает достаточную сходимость при оценке достижимой скорости катера. Однако следует иметь в виду, что отсутствие необходимой сходимости еще не является следствием недостатков проекта КПК или диаграммы. На величину максимальной скорости существенное влияние оказывают особенности крыльевой системы и состояние поверхностей крыльев, согласованность выбранных углов установки крыльев и элементов движителя, состояние погоды и т. д.
Если произведенный расчет подтвердит целесообразность установки на катере ПК, следует выбрать принципиальную схему крыльевого устройства. Для установки на катерах и моторных лодках применяются крыльевые системы с различным числом ПК и с разным распределением нагрузки между ними. Наибольшее распространение в настоящее время получила двукрылая система — система тандем. При этом как носовое крыло, так и кормовое могут состоять из одного или двух отдельно стоящих крыльев. Величина нагрузки, приходящейся на носовое и, соответственно, на кормовое крыло, обычно колеблется в диапазоне 60—40 % водоизмещения катера.
Читайте также: Типы малых гребных лодок
Двукрылая схема обладает высоким гидродинамическим качеством, весьма экономична и компактна. Иногда для облегчения выхода катера на крылья и улучшения его мореходности применяют третье крыло, называемое стартовым. Установленное в носовой части катера, оно создает дополнительный дифферент и позволяет увеличить углы атаки носового и кормового крыльев. В ряде случаев его устанавливают в средней части КПК для создания дополнительной подъемной силы на малых скоростях судна. Стартовое крыло действует лишь до выхода катера, на крылья, а также при провалах крыльев. На больших скоростях КПК оно находится над водой.
Применение двух- или трехкрылой системы имеет и отрицательные стороны, связанные с необходимостью преодоления большого горба сопротивления, с увеличением углов наклона гребных валов и ухудшением условий работы ГВ, с некоторым ухудшением мореходности катеров при, провалах носового крыла и т. д. Сложность увязки винторулевого комплекса с кормовым крылом затрудняет доводку винтов и крыльев на ходовых испытаниях.
Для многих проектируемых КПК можно вообще отказаться от кормового крыла и перейти к однокрылой схеме. В этом случае несущее ПК устанавливается в носовой части катера и принимает на себя около 50 % его веса. На ходу, когда динамические силы на крыле достигают значительных величин, носовая оконечность катера приподнимается над водой, и он движется только на крыле и на небольшом участке глиссирующего днища. Поскольку качество K глиссирующей пластины, разновидностью которой является кормовая часть днища, не превышает 10 %, то очевидно, что гидродинамическое качество однокрылого катера на некоторых режимах может оказаться несколько ниже, чем у двукрылого.
Несмотря на снижение качества, применение однокрылой схемы имеет ряд значительных преимуществ, которые позволяют ей успешно конкурировать с двукрылой схемой:
- упрощение конструкции крыльевого устройства в целом и удешевление в два раза его проектирования и изготовления;
- существенное упрощение конструкции кормового комплекса (кронштейна, ГВ, руля), уменьшение угла наклона линии гребного вала и улучшение условий работы движителя;
- возможность использования подвесных моторов без каких-либо переделок;
- уменьшение массы крыльевого устройства и, следовательно, всего однокрылого катера в целом;
- повышение мореходности катера вследствие отсутствия провалов кормового крыла, уменьшения размахов колебаний носа и лучшего обеспечения совместной работы на волнении носового ПК и корпуса катера;
- облегчение совместной доводки на ходовых испытаниях крыльевого устройства и ГВ с целью выбора оптимальных значений углов установки носового ПК и получения полностью согласованных величин диаметра и шага винта, позволяющих катеру развить наибольшую скорость при заданных значениях частоты вращения и мощности механической установки;
- обеспечение возможности эксплуатации катера со снятым носовым ПК, а также облегчение установки убирающегося, поворотного или автоматически управляемого носового ПК;
- уменьшение габаритной осадки катера по ГВ в корме;
- облегчение преодоления горба сопротивления и уменьшение перегрузок двигателя при выходе катера на носовое крыло как на тихой воде, так и на волнении;
- возможность оборудования одним носовым ПК с целью повышения скорости и мореходности уже спроектированных и построенных бескрылых глиссирующих катеров и моторных лодок без какой-либо переделки их валовых линий и выступающих частей.
Проектирование носового ПК и производство необходимых гидродинамических расчетов для однокрылого и двукрылого вариантов катера практически не отличаются друг от друга, если не считать некоторого уменьшения высот стоек однокрылого варианта, производимого с целью уменьшения ходового дифферента. Поэтому в дальнейшем специальных оговорок при выборе элементов носового крыла однокрылого катера почти не делается.
Приведенная краткая характеристика применяемых в отечественной практике крыльевых схем позволяет осуществить первоначальный выбор принципиальной схемы в зависимости от условий эксплуатации катера и от требований, предъявляемых к его ходкости и мореходности.
Для быстроходных катеров и моторных лодок, эксплуатирующихся преимущественно на спокойной воде, наиболее целесообразна схема, состоящая из двух малопогруженных ПК. При повышенных требованиях к мореходности катера и ограниченной мощности двигателя более рациональной и простой представляется однокрылая схема. Часто применяют комбинированные трапециевидные схемы, состоящие из плоских крыльев различного погружения и наклонных стабилизаторов, пересекающих свободную поверхность воды.
Рекомендуется к прочтению: Сопротивление движению малого судна
Для облегчения выхода катера на крылья на относительно малой скорости, а также на волнении применяют дополнительные стартовые крылья, устанавливаемые в носовой или средней части катера.
В дальнейшем принципиальная схема крыльевого устройства уточняется в зависимости от диапазона скоростей катера, от нагрузки, приходящейся на каждое крыло, места крепления ПК и т. д. Поскольку строгого разграничения условий применения той или иной схемы ПК не существует, на ее выбор могут оказать влияние также и субъективные обстоятельства (наличие средств и необходимых материалов и т. п.).
Определение площади подводных крыльев
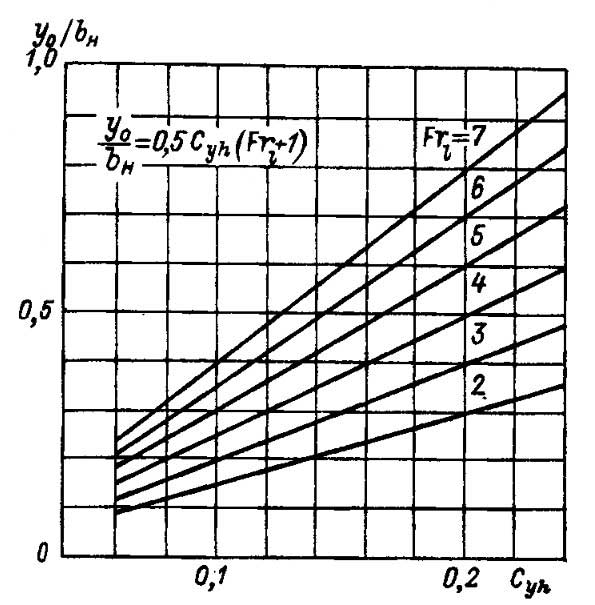
Выбор места крепления кормового крыла обычно не представляет затруднений — его устанавливают в районе транца или непосредственно за ним. Установка кормового крыла за транцем катера или моторной лодки является даже предпочтительной, так как при таком расположении ослабляется взаимное влияние глиссирующего днища и ПК, а также увеличивается расстояние между крыльями, что иногда бывает целесообразно. Условно, для упрощения расчетов, можно принять, что линия действия подъемной силы кормового крыла проходит через транец, так что если начало координат совместить с транцем, то абсцисса точки приложения подъемной силы кормового крыла будет xк = 0 (рис. 24).
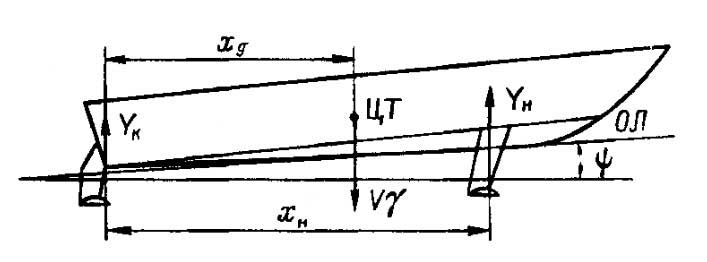
Задавшись долей нагрузки катера, приходящейся на носовое крыло Yн, и имея отстояние центра тяжести катера от транца xg, из уравнений равновесия можно найти абсциссу точки приложения подъемной силы носового крыла xн, определяющую место его крепления:
Носовое крыло следует располагать в относительно широком и наиболее удобном для крепления месте корпуса катера или моторной лодки.
С помощью этого же уравнения (Формула 21), при известном положении обоих крыльев, может быть определена величина подъемной силы, которую должно развивать носовое крыло,
Подъемная сила кормового крыла находится как разность Yк = Vγ-Yн.
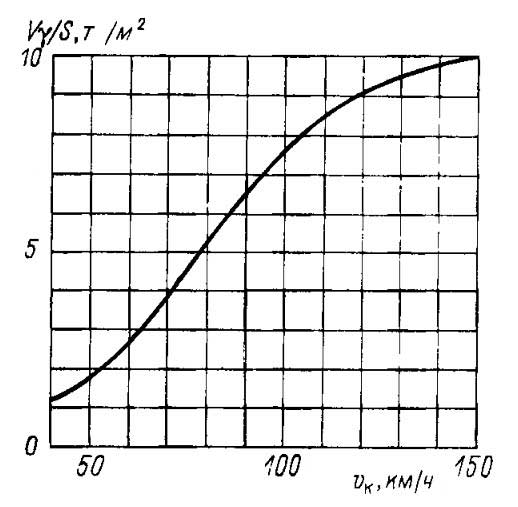
Рабочая несущая площадь ПК зависит от скорости движения и с увеличением скорости катера заметно уменьшается. Анализ большого количества КПК показывает, что для максимальных скоростей ν = 40 ÷ 100 км/ч отношение водоизмещения катера к площади его крыльев – так называемая удельная нагрузка крыльев — достаточно хорошо выражается эмпирической зависимостью (при ν в м/с):
При ν > 100 км/ч рост удельной нагрузки замедляется. Ориентировочная зависимость изменения удельной нагрузки крыльев от максимальной скорости катера представлена на рис. 25. Формула 22 и рис. 25 позволяют определить площадь ПК в первом приближении. Более точно несущие площади носового и кормового крыльев для заданной максимальной скорости катера ν определяют из соотношений:
При назначении величин КПС проектируемых крыльев Cyн и Cyк, входящих в формулы (Формула 23), исходят из совокупности многих обстоятельств, оказывающих влияние на действие ПК, с целью обеспечения высокого гидродинамического качества крыльев на режиме максимальной скорости, отсутствия кавитации на всех режимах движения и необходимой прочности ПК.
Гидродинамическое качество и кавитационная устойчивость ПК в значительной степени определяются их углами атаки, глубиной погружения и относительной толщиной основных несущих плоскостей. Как уже указывалось, наибольших значений гидродинамическое качество ПК достигает при малых положительных углах атаки.
Уменьшение глубины погружения понижает величину максимального качества крыла и несколько повышает оптимальные углы атаки (до 2—4°). Величины КПС, отвечающие достаточно высоким значениям гидродинамического качества ПК, как правило, не превышают значений Cy = 0,30 ÷ 0,35. Это относится и к увеличенным углам атаки крыльев, соответствующим малым глубинам погружения, так как с уменьшением глубины величина Cy также уменьшается. Поэтому для скоростей судна порядка 50—80 км/ч, когда нет опасности возникновения кавитации, величины КПС принимают равными 0,2—0,3.
При возрастании максимальной скорости катера до 90 км/ч и более следует считаться с возможностью появления кавитации. Для повышения кавитационной устойчивости ПК при больших скоростях катера рабочие значения КПС следует уменьшать. Уменьшение коэффициентов Cy будет приводить к снижению гидродинамического качества ПК, поэтому нижний предел для обеспечения бескавитационного обтекания ПК таких судов составляет Cy = 0,1.
Дальнейшее уменьшение Cy не рекомендуется, так как оно сопряжено с ухудшением мореходности и существенным снижением гидродинамического качества ПК.
При назначении КПС носового и кормового крыльев необходимо учитывать также следующие обстоятельства. При увеличении глубины погружения носового крыла его подъемная сила увеличивается как за счет уменьшения влияния свободной поверхности воды, так и за счет вхождения в воду дополнительных площадей, если это предусмотрено конструкцией крыльевого устройства. Однако из-за происходящего одновременно уменьшения угла ходового дифферента уменьшаются углы атаки обоих ПК и рост их подъемной силы замедляется, что неблагоприятно сказывается на поведении катера. При увеличении глубины погружения кормового крыла его угол атаки (вследствие увеличения угла ходового дифферента катера) также возрастает и способствует быстрейшему восстановлению потерянной подъемной силы крыла. Благодаря этому провалы кормового крыла имеют небольшую величину и их влияние на продольную устойчивость движения КПК представляет значительно меньшую опасность, чем провалы носового крыла.
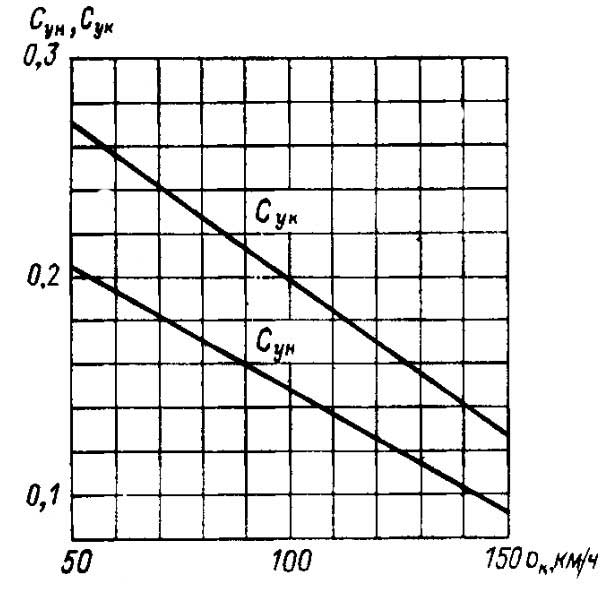
Данное соображение позволяет рекомендовать увеличение расчетных значений КПС кормового крыла Cyк по сравнению со значениями КПС носового крыла примерно в 1,3—1,4 раза. Увеличение Cyк дает возможность несколько уменьшить площадь кормового крыла и повысить его гидродинамическое качество. В соответствии с данной рекомендацией на рис. 26 построены примерные зависимости для назначения КПС носовых и кормовых ПК на максимальной скорости проектируемых катеров и моторных лодок. С помощью этих зависимостей можно находить ориентировочные значения Cyн и Cyк, обеспечивающие необходимую площадь ПК при достаточно высоком гидродинамическом качестве для катеров различной быстроходности. Однако во многих случаях с целью увеличения площади крыла и его хорды КПС приходится уменьшать против их значений, полученных по рис. 26.
Благодаря этому, несмотря на некоторое понижение качества, увеличивается абсолютное погружение крыла и улучшается мореходность катера, а также повышается прочность крыла. Вместе с тем при назначении КПС носового крыла необходимо следить, чтобы его величина на максимальной скорости не превосходила значений, полученных по формуле 11.
Выбор конструктивной схемы крыльев
Для правильного выбора типа и конкретной конструктивной схемы ПК, обеспечивающих определенные гидродинамические характеристики, следует оценить необходимые величины Cy носового и кормового крыльев не только на максимальной скорости судна, но и на промежуточных режимах движения. Условие сохранения постоянства подъемной силы, развиваемой крыльевой системой при ходе катера на крыльях, требует, чтобы на всех скоростях хода соблюдалось равенство:
где:
- Cyт и Sт — значения КПС и погруженной площади крыла на максимальной скорости катера νт;
- Cy и S — значения тех же параметров на промежуточной скорости ν.
Данное равенство показывает, что при постоянной погруженной площади ПК коэффициент Cy должен изменяться обратно пропорционально квадрату скорости и, следовательно, с уменьшением, скорости должен резко возрастать. В частности, при скорости выхода катера на крылья, которая обычно составляет около половины максимальной его скорости, величина КПС крыла Cy должна возрасти в 4 раза по сравнению с расчетным значением этого коэффициента на максимальной скорости. Обеспечить изменение коэффициента Cy в столь большом диапазоне очень сложно, так как влияние изменения погружения и угла атаки ПК, жестко связанного с корпусом катера, может привести к увеличению Cy только в 2—2,5 раза.
Недостающая часть подъемной силы должна быть компенсирована путем рационального выбора конструктивной схемы крыльевого устройства. Из основной формулы 1 следует, что необходимое дополнительное увеличение подъемной силы ПК на промежуточных скоростях катера может достигаться главным образом за счет входа в воду дополнительных площадей.
Предлагается к прочтению: Вычисление маневренности маломерного судна на криволинейной траектори
Увеличение погруженных площадей крыльев на малых скоростях судна может быть обеспечено применением различных комбинированных схем, включающих в себя помимо всегда находящихся в воде основных несущих плоскостей также наклонные, этажерочные, стартовые и другие крыльевые элементы, создающие добавочную подъемную силу и облегчающие как выход катера на ПК, так и его устойчивый ход на них при различных условиях эксплуатации. Особенно большое значение имеет правильный выбор конструктивного типа ПК для быстроходных катеров, имеющих скорость выхода на крылья νв ≈ 0,4νm и большой диапазон изменения скоростей на крыльях.
Необходимая несущая площадь ПК с ростом максимальной скорости у этих катеров уменьшается, и если не предусмотреть специальных конструктивных мер по увеличению площадей крыльев или их подъемных сил на промежуточных режимах движения, то выход катера на крылья будет затруднен. Для относительно тихоходных катеров скорость выхода на крылья составляет ~ 0,6ν m. В этом случае требуемое изменение коэффициента Cy может быть обеспечено в основном за счет влияния свободной поверхности воды и применения различного вида стартовых крыльев.
Предложен еще один довольно простой способ улучшения саморегулирования подъемной силы ПК. Стойки ПК крепятся на одной оси вращения, расположенной немного впереди, линий действия подъемной силы (рис. 27). Подъемная сила и сила сопротивления воды будут стремиться отклонить крыло в корму, благодаря чему его угол атаки уменьшается. Для ограничения угла поворота крыла его стойки опираются на пружины. Система будет находиться в равновесии до тех пор, пока момент от гидродинамических сил уравновешивается реактивным моментом упругих сил пружин. При нарушении равновесия в ту или другую сторону происходит соответствующее изменение угла атаки крыла и его подъемной силы. Например, при разгоне КПК ввиду малых скоростей движения подъемная сила крыльев и их сопротивление значительно меньше упругих сил пружин и крылья поворачиваются в сторону увеличения углов атаки, что облегчает преодоление горба сопротивления.
По мере увеличения скорости катера (после выхода его на крылья) подъемная сила и сопротивление крыльев также будут расти, отклоняя крылья в корму и уменьшая их угол атаки. При уменьшении скорости катера сопротивление крыльев и их подъемная сила будут уменьшаться, а углы атаки крыльев – увеличиваться, поддерживая равновесие между гидродинамическими силами и упругими силами пружин, действующими на ПК.
Рассмотренные примеры показывают, что крепление ПК вообще и главным образом носового крыла с помощью пружин должно приводить к значительному улучшению поведения катера.
Можно отметить следующие дополнительные особенности предлагаемого способа крепления ПК на катере или моторной лодке:
- наиболее эффективна установка пружин на крыльях, пересекающих свободную поверхность воды;
- в этом случае действие свободной поверхности, действие наклонных стабилизаторов и действие пружин будет взаимно усиливать и дополнять друг друга;
- наличие пружин будет улучшать поведение крылатого катера на волнении и уменьшать его ударные перегрузки;
- разделение носового крыла на два независимых крыла левого и правого бортов позволит раздельно регулировать подъемную силу с каждого борта, что также обеспечит повышение мореходных и маневренных качеств КПК;
- диапазон изменения углов атаки ПК может быть ограничен специальными стопорными устройствами.
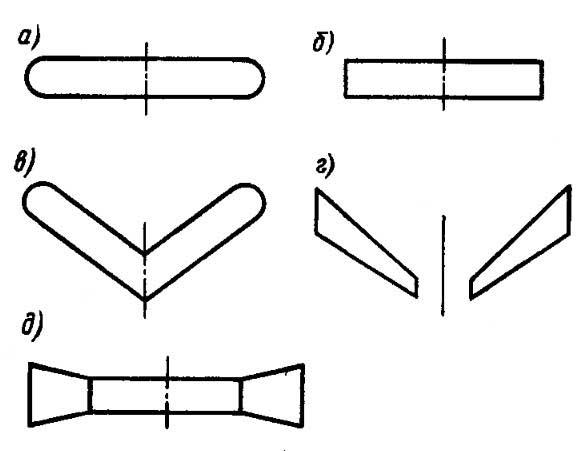
При выборе конкретной конструктивной схемы подводного крыльевого устройства можно ориентироваться на рис. 18 и 19, на которых приведены наиболее рациональные и широко применяемые в современном катеростроении схемы ПК.
Плоские малопогруженные крылья, изображенные на рис. 18, а и б, могут использоваться только для катеров, эксплуатирующихся на реках и озерах.
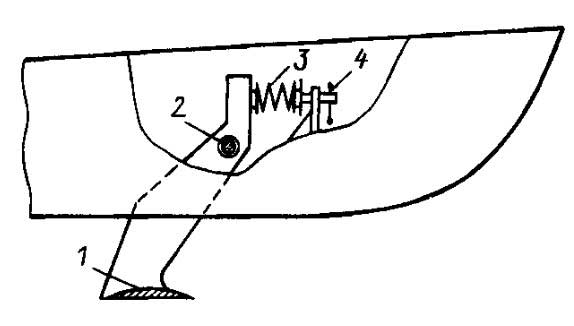
1 – ПК; 2 – ось поворота; 3 – пружина; 4 – регулировочное устройство
В чистом виде плоские малопогруженные ПК применяют весьма редко из-за их недостаточной остойчивости и мореходности.
Для повышения мореходных качеств и остойчивости КПК используют килеватые V-образные и различного вида отдельно стоящие ПК (см. рис. 18, в—е). Наличие килеватости крыльев несколько снижает их гидродинамическое качество (при углах килеватости, близких к 30°, на 10—15 %). Одновременно увеличивается вероятность появления кавитации на глубоко погруженном носике крыла. Поэтому применение таких крыльев возможно при скорости катеров и лодок, не превышающей 80 км/ч.
Отдельно стоящие носовые и кормовые ПК, обеспечивающие хорошую остойчивость, применяют при разработке конструкций убирающихся крыльев — поднимающихся или поворачивающихся.
В целях возможности использования положительных качеств как плоских малопогруженных крыльев, так и килеватых V-образных, имеющих повышенную мореходность, применяют так называемые комбинированные схемы (см. рис. 18, ж—к). Наиболее распространены в настоящее время комбинированные трапециевидные схемы, состоящие из основного несущего, чаще всего плоского малопогруженного крыла, наклонных стабилизаторов и различного рода дополнительных элементов (стартовых и глубокопогруженных).
Рекомендуется к прочтению: Гидроаэродинамика парусного судна
Основное несущее ПК для большинства представленных схем выбирается таким образом, чтобы на максимальной скорости судна его погружение находилось бы в пределах h = (0,2 ÷ 1,0) b. При этом с увеличением скоростей погружения крыльев должны уменьшаться.
Удлинение ПК следует принимать не менее λ = l/b ≈ 5. Такое удлинение соответствует относительно высокому гидродинамическому качеству крыла при небольших концевых потерях.
Размах основной несущей, плоской или малокилеватой, части носового крыла принимают по возможности наибольшим и равным примерно максимальной ширине катера по палубе. Увеличение размаха основной плоскости ПК улучшает остойчивость КПК на ходу. Размах носового ПК с наклонными стабилизаторами, если они устанавливаются, может в 1,5—2 раза превышать ширину катера или моторной лодки. Размах кормового трапециевидного крыла обычно составляет около 0,7-0,8 размаха носового.
Наклонные стабилизаторы представляют собой крыльевые элементы, установленные на концах основного несущего ПК таким образом, чтобы на максимальной скорости катера их большая часть находилась над водой. При провалах крыльев, имеющих наклонные стабилизаторы, увеличение подъемной силы происходит не только за счет увеличения погружения ПК под свободную поверхность воды, но и за счет увеличения погруженной площади стабилизаторов.
Наклонные стабилизаторы увеличивают также эффективную площадь ПК на малых скоростях судна и облегчают преодоление горба сопротивления. Кроме того, они создают большие восстанавливающие моменты при кренах, что улучшает остойчивость и мореходность катеров в крыльевом режиме. Наиболее простые в технологическом отношении наклонные стабилизаторы имеют плосковыпуклый сегментный профиль сечений с постоянной хордой и одинаковым углом атаки по всему размаху.
Для повышения эффективности действия стабилизаторов их следует проектировать расширяющимися к внешним концам с постепенно увеличивающимся углом атаки и нарастающей вогнутостью нагнетающей поверхности. Устанавливать наклонные стабилизаторы следует с тем же углом атаки, какой имеет основная плоскость, или с небольшим плюсовым углом по отношению к ней (△a = 0°30′÷1°30′).
Несмотря на значительное усложнение технологии изготовления стабилизаторов, осуществление всех перечисленных рекомендаций или некоторых из них представляется весьма целесообразным. Благодаря им рост подъемной силы при погружении всего крыла или одного его края происходит более стремительно, что благоприятно отражается на мореходности катера и ускоряет выход его на крылья. Погружение основной несущей плоскости ПК со стабилизаторами определяется величиной максимальной скорости катера. При скорости до 80 км/ч, когда опасность появления кавитации невелика, погружение основной части крыла может быть увеличено почти до хорды, что уменьшает вероятность срыва потока и повышает как гидродинамическое качество крыла, так и мореходность катера. При этом размах основной плоской или малокилеватой части крыла может быть несколько уменьшен, а размах стабилизаторов увеличен.
С возрастанием максимальной скорости катера погружение трапециевидного крыла должно быть уменьшено и при скорости порядка 100 км/ч и выше оно достигает значений h ≈ 0,2b.
Углы наклона стабилизаторов в плоскости шпангоутов, т. е. углы килеватости, обычно принимают равными β = 25 ÷ 35°. Уменьшение этих углов является нежелательным из-за облегчения прорыва воздуха к основной плоскости. Увеличение же угла β уменьшает эффективность действия стабилизаторов и их гидродинамическое качество.
Дополнительные элементы в этих схемах ПК ставятся в различных сочетаниях в зависимости от их назначения: одни в качестве стартовых, помогающих катеру выйти на крылья, — в этом случае после отрыва корпуса они выходят из воды (рис. 18, и), другие являются глубокопогруженными и предназначены для повышения стабилизации хода катера на волнении (рис. 18, к).
Увеличение подъемной силы при преодолении горба сопротивления может быть достигнуто также применением устройств, позволяющих изменять угол атаки крыльев путем поворота их вокруг поперечной оси.

1 – крыло; 2 – ось поворота; 3 – закрылок; 4 – тяга
Конструкция привода для поворота всего крыла является довольно сложной и применяется относительно редко. Несколько проще поворачивать не все крыло, а только его заднюю часть, так называемый закрылок. Конструктивно закрылок соединяется с передней частью крыла при помощи шарниров (рис. 28). Площадь закрылка обычно составляет около 30 % площади всего крыла. При опускании закрылка увеличивается кривизна профиля крыла и его подъемная сила возрастает. Перекладка закрылков позволяет в случае необходимости получить значительное увеличение подъемной силы. Правда, при этом из-за наличия приводов, обтекателей шарниров и щелей между основным крылом и закрылком гидродинамическое качество ПК несколько снижается.
Особенности обводов корпуса крылатого катера
Крыльевая система катера должна составлять с его корпусом единый архитектурный и гидродинамический комплекс. Поэтому при выборе формы обводов корпуса необходимо учитывать специфические особенности движения КПК на разных режимах работы двигателей и при различных условиях его эксплуатации. На режимах малых скоростей обводы корпуса должны способствовать уменьшению горба сопротивления для облегчения выхода катера на крылья как на спокойной воде, так и на волнении. При ходе на волнении форма обводов корпуса, должна обеспечивать общее улучшение поведения катера, ослабление его ударов о воду, снижение сопротивления и т. д. Лучше всего этим требованиям удовлетворяют остроскулые глиссирующие обводы с переменной килеватостью и с одним или несколькими реданами.
Угол килеватости β у транца для повышения гидродинамического качества глиссирующего днища должен находиться в пределах 0—5°. В особенности это важно для однокрылых катеров и моторных лодок. В районе миделя углы β обычно достигают значений 10—15° и по мере приближения к носовой оконечности увеличиваются до 50° и более. Повышение углов килеватости носовой оконечности катера приводит к смягчению ударов корпуса о воду при ходе с большой скоростью на волнении. При выборе углов килеватости следует иметь в виду, что гидродинамическое качество K килеватых корпусов по сравнению с плоской пластиной, у которой оно составляет около 10, уменьшается: при килеватости 10° до 8,5, при 20° — до 6,5 и при 30° — до 5.
Наличие реданов позволяет увеличить ходовые углы атаки днища, уменьшить замываемую водой поверхность корпуса и ускорить выход катера на глиссирование и крылья. Если предусматривается один редан, то он располагается обычно вблизи миделя таким образом, чтобы на него приходилась большая часть нагрузки катера — 70-80 %.
Чтобы обеспечивался доступ воздуха под днище в межреданное пространство, благодаря чему уменьшается сопротивление катера, необходимо иметь реданы высотой hр ≈ (0,03 ÷ 0,04)Bр, где Bр — ширина катера по скуле в месте расположения редана.
Для уменьшения горба сопротивления при выходе катера на крылья длину межреданной части днища Lр, т. е. расстояние между реданом и транцем, не следует принимать более Lр ≈ 2,7Bр.
Увеличение количества реданов существенно усложняет конструкцию корпуса. Поскольку четких рекомендаций по проектированию обводов многореданного корпуса в настоящее время нет, то для определения положения реданов и их размеров необходимо проводить тщательные буксировочные и мореходные испытания моделей КПК в опытовом бассейне или на открытом водоеме.
Коэффициент полноты мидель-шпангоута КПК обычно принимают равным βмид = 0,55 ÷ 0,65, а коэффициент общей полноты δ = 0,3 ÷ 0,4. Главные размерения корпуса крылатого катера или моторной лодки определяются в основном требованиями общего расположения. Длину корпуса КПК обычно принимают в пределах L = (4 ÷ 6)B.
При таких соотношениях, являющихся типичными для глиссирующих катеров, ширина корпуса получается достаточной для удобного крепления крыльевого устройства, размещения пассажиров, главных двигателей и различного оборудования, а умеренная длина позволяет обеспечить необходимые прочность и жесткость корпуса при небольшой его массе. Следует подчеркнуть, что, поскольку при ходе на ПК катер представляет собой балку на двух опорах, появление больших стрелок прогиба корпуса, приводящих к существенным изменениям углов атаки закрепленных на нем крыльев, недопустимо. Обеспечение же надлежащих прочности и жесткости длинного корпуса вызовет излишнее увеличение его массы.
Моторные лодки на крыльях обычно имеют несколько меньшую длину корпуса: L ≈ (2,5 ÷ 3,0)B. Дальнейшее уменьшение длины корпуса крылатых катеров и мотолодок представляется нежелательным, так как при этом значительно возрастает сопротивление воды на режимах плавания и будет затруднен выход на крылья. Кроме того, для двукрылых катеров и лодок в этом случае будет уменьшаться расстояние между крыльями и их взаимодействие может стать отрицательным.
Ширина транца КПК выбирается из условий удобства крепления кормового крыла и снижения сопротивления воды при выходе катера на крылья. Наиболее часто отношение ширины транца к наибольшей ширине катера или редана принимают равным Bтр/Bр ≈ 0,6 ÷ 0,8.
На выход крылатого катера на крылья и его мореходность так же положительно влияет установка в носовой части брызгоотражателей шириной 50—100 мм.
Разработка формы профилей крыльев и стоек
Выбор формы профилей крыльевых сечений определяется необходимостью обеспечения на максимальной скорости катера высокого гидродинамического качества, отсутствия кавитации и срывов потока при достаточной прочности. Наилучшим образом этим требованиям удовлетворяют сегментные профили с острыми кромками и профили типа Вальхнера с приполненной и слегка приподнятой скругленной входящей кромкой. Благодаря указанным особенностям профили Вальхнера имеют более полную, чем у сегментных профилей, и более равномерную, чем у авиационных профилей, эпюру давления на засасывающей стороне.
Сегментные профили применяют при проектировании крыльев, движущихся вблизи свободной поверхности воды или пересекающих ее. Во многих случаях для увеличения диапазона углов бессрывного обтекания ПК быстроходных катеров входящую кромку сегментных профилей также несколько приполняют или смещают максимальную толщину профиля от середины хорды на 10—15 % в нос. Кроме того, для уменьшения вероятности срыва потока при увеличении углов атаки крыла можно рекомендовать небольшой отгиб входящей кромки сегментного профиля вниз.
При проектировании ПК, имеющих постоянное расчетное погружение не менее хорды, можно применять профили Вальхнера, гидродинамическое качество которых несколько выше. Использование профилей Вальхнера для малопогруженных крыльев не представляется возможным, так как наличие скругленных и приподнятых входящих кромок приводит к увеличению местных углов атаки, облегчающему срывы потока с крыла.
Нижняя поверхность ПК делается обычно плоской. Придавая ей небольшую вогнутость (1—2 %), можно несколько увеличить гидродинамическое качество крыла. Наличие вогнутости приводит также к увеличению КПС крыла при том же самом геометрическом угле атаки, так как у вогнутого крыла возрастает давление на нагнетающей поверхности и, вследствие увеличения кривизны, повышается разрежение на засасывающей поверхности. Применение крыльев с вогнутой нагнетающей поверхностью не всегда целесообразно. При Cy < 0,2 геометрические углы атаки вогнуто-выпуклого профиля становятся отрицательными, и на нагнетающей стороне может возникнуть разрежение, из-за чего гидродинамическое качество будет снижаться. Следует также считаться с усложнением технологии изготовления крыла. Относительные ординаты острокромочных плоско-выпуклых сегментных профилей и профилей Вальхнера, применяемых для изготовления ПК, представлены в табл. 1. Обозначения ординат профилей, принятые в таблице, связаны с рис. 29. Ординаты симметричного плоско-выпуклого сегментного профиля, образованного по дуге круга, могут быть получены также по формуле:
По этой же формуле можно найти ординаты вогнутости профиля ПК или его стабилизатора, если принять максимальную стрелку вогнутости нагнетающей стороны профиля равной e.m.
| Таблица 1. Относительные ординаты крыльевых профилей | |||||
|---|---|---|---|---|---|
| № ординаты | Относительная абсцисса ординаты x/b | Плоский сегментный профиль | Профиль Вальхнера | ||
| симметричный круговой yв/em | с приполненной входящей кромкой yв/em | засасывающая сторона yв/em | нагнетающая сторона yн/em | ||
| 0 | 0 | 0 | 0 | 0,144 | 0,144 |
| 1 | 0,0125 | 0,049 | 0,088 | 0,280 | 0,062 |
| 2 | 0,025 | 0,098 | 0,162 | 0,351 | 0,047 |
| 3 | 0,050 | 0,190 | 0,286 | 0,451 | 0,032 |
| 4 | 0,075 | 0,278 | 0,386 | 0,530 | 0,023 |
| 5 | 0,100 | 0,360 | 0,470 | 0,599 | 0,015 |
| 6 | 0,150 | 0,510 | 0,605 | 0,710 | 0,005 |
| 7 | 0,200 | 0,640 | 0,721 | 0,795 | 0 |
| 8 | 0,300 | 0,840 | 0,881 | 0,920 | 0 |
| 9 | 0,400 | 0,960 | 0,972 | 0,985 | 0 |
| 10 | 0,500 | 1,0 | 1,0 | 1,0 | 0 |
| 11 | 0,600 | 0,960 | 0,960 | 0,967 | 0 |
| 12 | 0,700 | 0,840 | 0,840 | 0,856 | 0 |
| 13 | 0,800 | 0,640 | 0,640 | 0,676 | 0 |
| 14 | 0,900 | 0,360 | 0,360 | 0,415 | 0 |
| 15 | 0,950 | 0,190 | 0,190 | 0,252 | 0 |
| 16 | 1,0 | 0 | 0 | 0,033 | 0,033 |
Для получения абсолютных ординат и построения профиля крыла необходимо относительные ординаты
, полученные по табл. 1 или по формуле 25, умножить на принятые значения максимальной толщины и хорды крыльевого профиля. Стойки крыльев делают симметричными, с плавно обтекаемым двояковыпуклым профилем и острой входящей кромкой. Выходящую кромку стоек с целью смещения в корму максимальной толщины и уменьшения сопротивления обычно срезают, так что она получается тупой. Вследствие попадания в эту зону воздуха разрежение за стойкой снимается, и давление становится равным атмосферному.
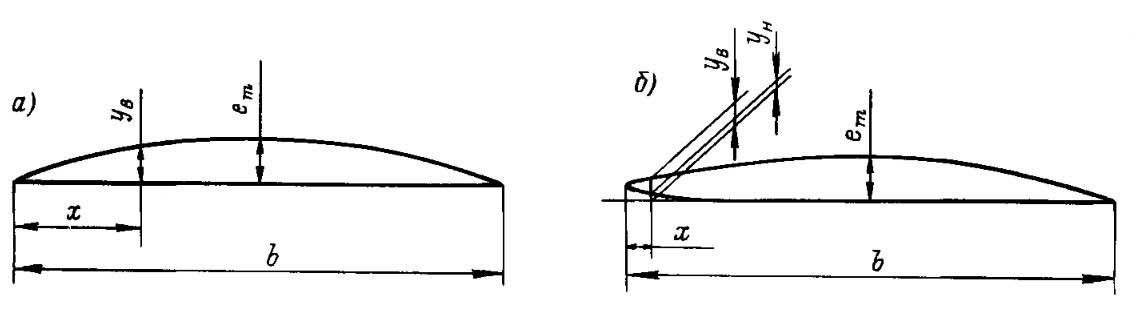
a – сегментный профиль; б – профиль Вальхнера
Рекомендуемые для изготовления таких стоек профили приведены на рис. 30 и в табл. 2. Наличие стоек снижает гидродинамическое качество ПК, поэтому следует стремиться к тому, чтобы их количество, определяемое условиями прочности крыла, было наименьшим. Иногда часть стоек размещают на наклонных стабилизаторах, чтобы на повышенных скоростях судна они вместе со стабилизаторами выходили из воды. Располагая стойки, необходимо следить, чтобы наибольшие толщины стоек и крыла были как можно дальше разнесены друг относительно друга.

В этом случае максимальные разрежения, возникающие на стойках, не будут накладываться на максимальные разрежения засасывающей поверхности крыла и вероятность появления преждевременных срывов потока и кавитации значительно уменьшится. Толщины стоек принимаются минимальными и определяются в основном нагрузками, которые они воспринимают.
| Таблица 2. Относительные ординаты профилей стоек | ||
|---|---|---|
| Относительная абсцисса х/b | Круговой сегмент y/em | Параболический сегмент y/em |
| 0 | 0 | 0 |
| 0,075 | 0,190 | 0,286 |
| 0,150 | 0,360 | 0,470 |
| 0,300 | 0,640 | 0,721 |
| 0,450 | 0,840 | 0,881 |
| 0,600 | 0,960 | 0,972 |
| 0,750 | 1,000 | 1,000 |
| 1,000 | 0,890 | 0,900 |
Весьма существенное влияние на работу крыльевого устройства и поведение КПК оказывают высоты стоек, определяемые в зависимости от размеров катера и от ожидаемой его мореходности. Наиболее надежно высоты стоек могут быть определены при помощи модельных буксировочных и мореходных испытаний. Ориентировочные значения отстояния носового крыла от ОЛ в зависимости от водоизмещения КПК приведены на рис. 31.
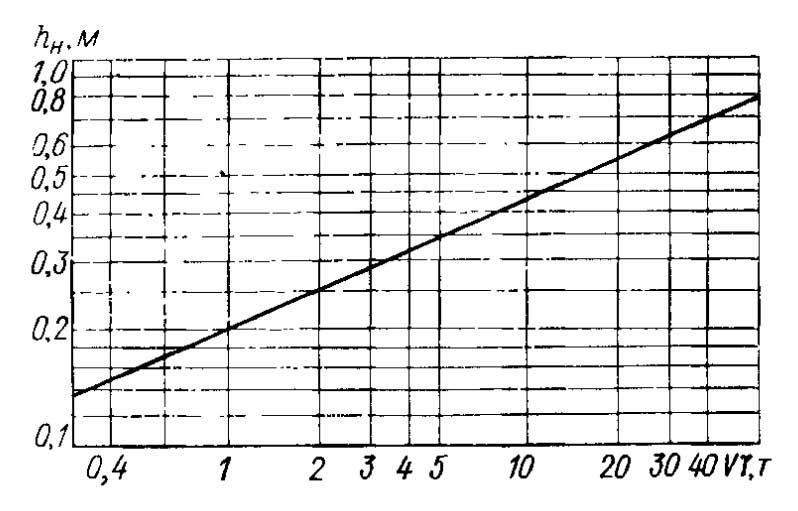
Высоты стоек кормового крыла определяются углом желательного дифферента катера. При этом необходимо учитывать, что кормовое крыло на ходу располагается по впадине, создаваемой носовым крылом. При проектировании однокрылых катеров и моторных лодок высоты стоек носового крыла могут быть несколько уменьшены.
Определение буксировочного сопротивления катеров на подводных крыльях
До выхода КПК на крылья его буксировочное сопротивление, как и сопротивление обычного судна, в основном состоит из сопротивления корпуса и его выступающих частей. К последним в данном случае следует отнести и крыльевое устройство. Горб сопротивления по этой причине имеет большую величину, чем у глиссирующих судов. После выхода корпуса катера из воды его сопротивление быстро снижается и при FrV ≈ 3,0 ÷ 3,5 достигает своего наименьшего значения. При дальнейшем повышении скорости судна его сопротивление плавно возрастает по закону, близкому к квадратичному. В этот момент в воде находятся и создают сопротивление только крылья, их стойки, гребные валы с кронштейнами и рули. Полное буксировочное сопротивление КПК может быть представлено в виде суммы составляющих:
где:
- Rкор – сопротивление корпуса катера на режимах, предшествующих его отрыву от воды (при движении на крыльях Rкор = 0);
- Rкр — сопротивление погруженных частей крыльев и стоек;
- Rв.ч — сопротивление всех выступающих частей, находящихся в воде;
- Rа — воздушное сопротивление.
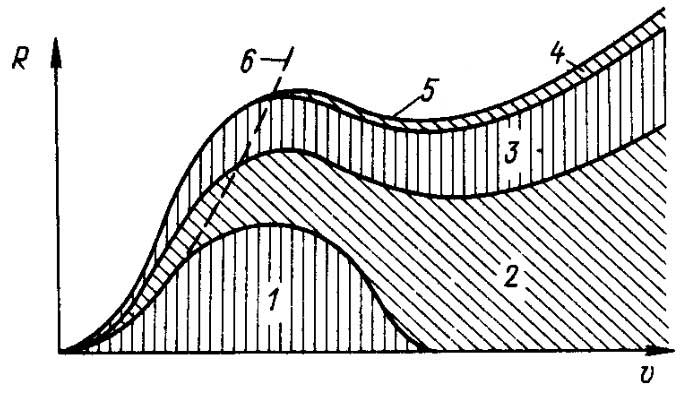
1 – корпуса катера; 2 – ПК; 3 – выступающих частей и стоек крыльев; 4 – воздушное сопротивление; 5 – полное сопротивление; 6 – катера без крыльев
Определение сопротивления КПК по результатам ходовых испытаний прототипа
Оценка сопротивления, а также скоростных и мореходных качеств проектируемого КПК, произведенная на основании гидродинамического анализа результатов скоростных испытаний катера-прототипа, во многих случаях обеспечивает достаточную надежность. Для проведения анализа необходимо по диаграммам или расчетным путем (см. статью Гидродинамические характеристики ГВ и технология построения паспортных диаграмм“Характеристики гребных винтов – расчет гидродинамики”) по формулам Гребные винты малотоннажных судов“Коэффициенты упора и момента динамических характеристик” и Гребные винты малотоннажных судов“КПД винта при различных значениях поступи” определить кривые действия ГВ, установленного на катере-прототипе, в виде зависимостей коэффициентов K1, K2 и ηp от относительной поступи винта в свободной воде. Сопротивление катера-прототипа на различных скоростях движения, равное тяге гребного винта R = Pe = K1(1-t)ρn2D4 может быть найдено с помощью характеристик винта по следующей схеме:
Расчет сопротивления выполняется для скоростей катера-прототипа, полученных на различных режимах работы двигателя, указанных в начале схемы (пп. 1—5). В п. 10 вычисляется необходимая мощность двигателя Ne, которая может быть использована для контроля произведенного анализа, в особенности на максимальном режиме работы.
Коэффициенты взаимодействия винта и корпуса катера-прототипа w и t находят в соответствии с рекомендациями статьи Гребные винты малотоннажных судов“Коэффициенты взаимодействия винта и корпуса”. Такая схема анализа полностью применима только к катерам-прототипам, имеющим некавитирующие ГВ. При наличии кавитации ГВ прототипа анализ его действия существенно усложняется, а точность снижается. В этом случае анализ производят с учетом рекомендаций статей Гребные винты малотоннажных судов“Кавитация гребного винта” и Гребные винты малотоннажных судов“Проектирование гребных винтов” по расчету кавитационных характеристик ГВ. Примерная схема анализа имеет следующий вид:
Приведенные схемы анализа позволяют определить кривую сопротивления только для одного случая нагрузки катера-прототипа, одного состояния погоды, одних углов установки крыльев и т. п. При изменении любого из названных параметров расчет надо повторять. С целью обобщения анализа такого типа и уменьшения количества вычислений целесообразно произвести в соответствии с рекомендациями статьи Гидродинамические характеристики ГВ и технология построения паспортных диаграмм“Характеристики гребных винтов – расчет гидродинамики” расчет и построение паспортной диаграммы — в виде характеристик изменения тяги ГВ катера-прототипа и мощности двигателя в зависимости от скорости при различных частотах вращения двигателя.
Если на построенные характеристики тяги Pe = f(νк) нанести замеренные в процессе ходовых испытаний скорости катера-прототипа при соответствующих частотах вращения двигателя и соединить полученные точки плавной кривой, то можно получить приближенную кривую сопротивления при тех или иных условиях эксплуатации, характеризующих водоизмещение и центровку катера, состояние погоды, углы установки крыльев и т. д.
Читайте также: Суда с механическим двигателем
Перенос точек пересечения кривой сопротивления R = f(νк) с характеристиками тяги Pe = f(νк) на характеристики мощности Pe = f(νк) при тех же режимах работы двигателя позволяет получить винтовую характеристику Ne = f(νк, n). Она представляет собой зависимость между частотой вращения и мощностью двигателя, необходимой для обеспечения данного изменения скорости катера-прототипа при определенных условиях его испытаний. Если полученная винтовая характеристика будет проходить на паспортной диаграмме через точку, соответствующую максимальной или другой заданной мощности установленного на катере двигателя при той же самой частоте вращения, что и на испытаниях, то это будет свидетельствовать об удовлетворительной сходимости результатов анализа.
В таком случае полученная кривая сопротивления близкого катера-прототипа с некоторым приближением может рассматриваться как исходная для пересчета на проектируемый катер по приведенным выше соотношениям, т. е. по условному кубу масштаба k3 = Vн/Vм.
Определение сопротивления КПК расчетно-теоретическим путем
Сопротивление проектируемого катера при ходе его на ПК может быть получено также чисто расчетным путем на основе методики, предложенной В. Т. Соколовым. Этот способ целесообразно использовать при отсутствии модельных буксировочных испытаний в бассейне, а также для контроля результатов расчета сопротивления КПК, полученных с помощью других методов. Согласно данной методике отдельные составляющие полного сопротивления катера после выхода его на крылья:
в основном определяются выбранными элементами ПК, их погружениями и скоростью катера.
1 Сопротивление системы, состоящей из носового и кормового ПК, может быть представлено как сумма:
Коэффициент сопротивления носового крыла Cxн слагается из коэффициентов профильного сопротивления Cxпр, индуктивного сопротивления Cxi и волнового сопротивления Cxв:
Коэффициент профильного сопротивления находится по формуле:
где:
- — коэффициент сопротивления трения эквивалентной плоской шероховатой пластины, определяемый по кривым Прандтля — Шлихтинга (рис. 33) в зависимости от значений lg Reb = lg(ν·b/ν) и отношения хорды крыла к высоте бугорков шероховатости b/∊ш;
- т′ = 0,5 при Cyh = 0,15 ÷ 0,20 и т′ = 0,75 при Cyh = 0,5 ÷ 0,6.
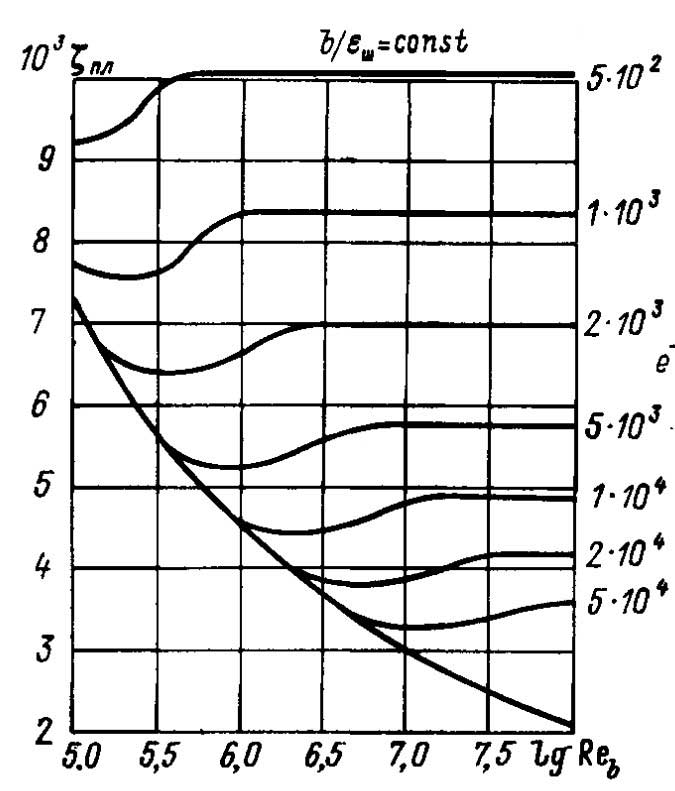
b – хорда крыла; ∊ш – высота бугорков шероховатости
Значения коэффициентов kφ и φ находятся по рис. 7 и 15.
Коэффициент индуктивного сопротивления малопогруженного крыла:
от глубины погружения при различных числах Фруда
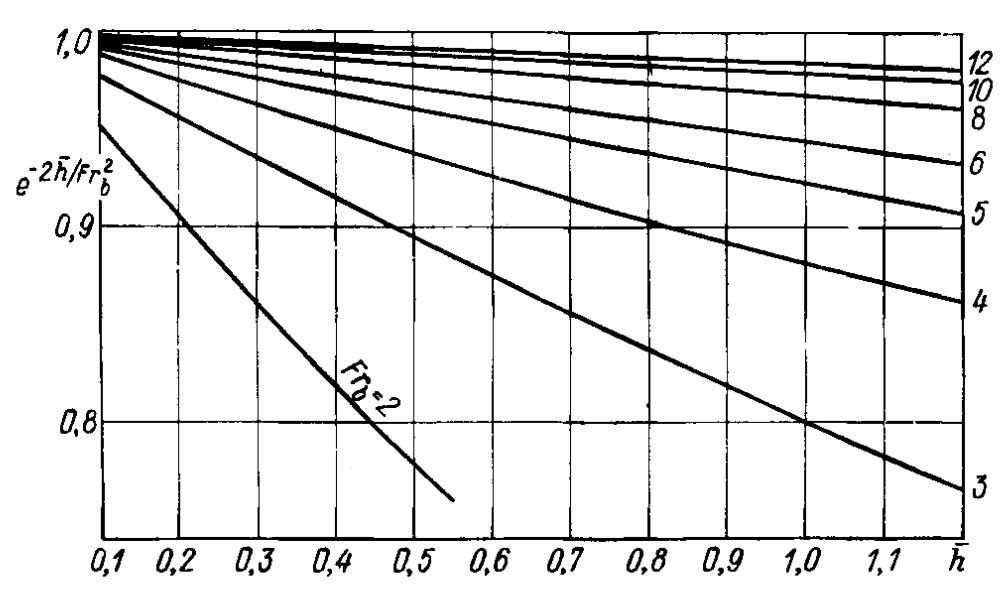
Коэффициент волнового сопротивления:
Для облегчения практических расчетов Сопротивление движению малого суднаволнового сопротивления на рис. 34 приведены вспомогательные зависимости
при различных числах Фруда по хорде крыла Frb.
Коэффициент сопротивления кормового крыла определяют аналогичным образом, но с дополнительным учетом имеющего место влияния на него скоса потока, вызванного носовым крылом. Это влияние, как указывалось [см. формулы 9 и 10], учитывается коэффициентом:
При проектировании сложных комбинированных крыльев расчет ведется для средних величин удлинения и погружения.
2 Формула для определения сопротивления выступающих частей имеет вид:
где:
- Cxвал ≈ 0,2 — коэффициент сопротивления валопровода;
- Sпр.в – площадь проекции гребного вала на плоскость шпангоута;
- Sкрн, Sст, Sр — площади боковых проекций кронштейнов гребного вала, стоек ПК и рулей соответственно.
Коэффициенты сопротивления кронштейнов Cxкрн, стоек крыльев Cxст и рулей Cxр вычисляются по однотипной формуле:
Коэффициент kS учитывает кривизну поверхности и принимается для стоек, рулей и кронштейнов kS = 1,1 ÷ 1,2. Коэффициент брызгового сопротивления зависит от смоченного удлинения стойки или руля λсм = h/b и относительной толщины δ:
Увеличение сопротивления кавитирующих или клиновидных стоек (рулей) при срывном обтекании учитывается коэффициентом:
При безотрывном обтекании принимается, что Cxкав = 0.
3 Воздушное сопротивление КПК вычисляется по формуле:
где:
- Sмид — площадь проекции КПК на плоскость миделя.
Коэффициент воздушного сопротивления в соответствии с экспериментальными данными составляет Cxа = 0,5 ÷ 0,8.
Дополнительно необходимо сделать следующие замечания. Относительные глубины погружения носового и кормового крыльев могут быть установлены в соответствии с расчетом посадки катера на различных скоростях, произведенным по методике, предложенной в работе, или приближенно назначены применительно к выбранным элементам крыльевой системы. При этом погружение кормового крыла отсчитывается от уровня волновой впадины, образованной носовым крылом. Значения коэффициентов подъемной силы носового и кормового крыльев на различных скоростях катера определяются исходя из принятых величин этих коэффициентов для его расчетной скорости.
Высота бугорков шероховатости при расчете коэффициентов трения крыльев и стоек при достаточно гладкой и чистой поверхности принимается ∊ш = 0,01 ÷ 0,02 мм. При ухудшении поверхности крыльев высота бугорков шероховатости может быть увеличена до ∊ш = 0,03 ÷ 0,06 мм. При определении коэффициентов индуктивного сопротивления необходимо учитывать расположение стоек крыльев и наличие на нижней поверхности у концов крыльев направляющих вертикальных кильков.
Стойки и кильки, находящиеся у краев крыла, играют роль шайб и затрудняют перетекание жидкости в область пониженного давления. Вследствие этого увеличивается эффективное удлинение крыла и значительно уменьшается его индуктивное сопротивление.
Приближенное определение сопротивления КПК
В некоторых случаях при необходимости быстрой оценки величин буксировочного сопротивления КПК в значительном диапазоне скоростей может быть использован следующий приближенный прием. Статистические модельные и натурные экспериментальные данные показывают, что гидродинамическое качество реально построенных и испытанных КПК колеблется в относительно небольших пределах. В частности, на горбе сопротивления при FrV = 1,5 ÷ 2,0 коэффициент качества достигает в среднем K = 7 ÷ 9. После полного выхода катера на крылья при FrV = 3,0 ÷ 3,5 гидродинамическое качество возрастает до своего максимума и становится K = 10 ÷ 12. При дальнейшем увеличении скорости КПК до FrV = 4 ÷ 5 качество опять начинает снижаться до K = 8 ÷ 6.
Соответствующие осредненные кривые изменения гидродинамического качества двух и однокрылых КПК в зависимости от чисел Фруда по водоизмещению FrV приведены на рис. 20. На основании этих кривых, задаваясь ожидаемым качеством проектируемого КПК, можно приближенно определить его сопротивление на различных скоростях. Порядок расчета представлен следующей схемой:
Данная схема может быть также использована при наличии кривой гидродинамического качества близкого прототипа. В этом случае точность определения сопротивления и буксировочной мощности КПК значительно повысится.
Пример расчета элементов крыльевого устройства и ГВ
Учитывая относительную сложность методов проектирования подводных крыльев, определения сопротивления воды при ходе на крыльях и выбора основных элементов гребных винтов, в особенности кавитирующих, представляется целесообразным пояснить последовательность выполнения всего комплекса необходимых расчетов численным примером применительно к быстроходному КПК.
| Исходные данные | |
|---|---|
| Длина катера L, м | 9,6 |
| Наибольшая ширина B, м | 2,4 |
| Водоизмещение катера с крыльями V, м3 | 2,8 |
| Отстояние ЦТ катера от транца xg, м | 3,6 |
| Мощность двигателя Ne, кВт | 140 |
| Частота вращения двигателя nдв, об/мин | 2 400 |
| Частота вращения ГВ n, с-1 | 40 |
| Наибольшая скорость νк, км/ч | 70 |
| Допустимый диаметр ГВ D, м | 0,36 |
| Угол наклона линии гребного вала v, град | 13 |
| Глубина погружения оси ГВ hs, м | 0,4 |
| Угол ходового дифферента ψ, град | 3 |
Выбор элементов крыльевого устройства. Принимаем крыльевую систему тандем, состоящую из носового и кормового крыльев. Каждое крыло будет воспринимать около 1/2 нагрузки катера, т. е. около 1,4 т. В соответствии с рекомендациями кормовое ПК располагаем у транца (см. рис. 24), а носовое – на расстоянии 7,2 м от него [см. формулу (21)].
С помощью рис. 25 находим необходимую площадь ПК ΣS ≈ 0,7 м2.
Принимая значения коэффициентов подъемной силы для носового и кормового ПК в соответствии с рис. 26 Cyн ≈ 0,18 и Cyк ≈ 0,24, по формулам 23 находим площадь каждого крыла:
В связи с большим диапазоном скоростей проектируемого катера (FrV > 5) представляется целесообразным принять для него комбинированную схему крыльевого устройства, состоящую из основной несущей плоскости и наклонных стабилизаторов. Основную несущую плоскость носового ПК для повышения ходовых, маневренных и мореходных качеств принимаем стреловидной (χ ≈ 16°) и с небольшой килеватостью (β ≈ 9°). Размах ее равен 1,6 м, а вместе со стабилизаторами на максимальной скорости ~2 м. Для получения площади носового крыла Sн ≈ 0,4 м2 хорда его должна быть bн = 0,2 м. Удлинение носового крыла при этом составит λ = lн/bн = 2/0,2 = 10.
Кормовое крыло делаем трапециевидным (см. рис. 18, ж). Основная несущая плоскость имеет размах lк = 1 м. Недостающая часть площади кормового крыла и, следовательно, его подъемной силы при хорде bк = 0,2 м будут обеспечиваться наклонными стабилизаторами, рабочий размах которых на скорости 70 км/ч составит около l ≈ 1,5 м, а удлинение λ = 7,5.
Для получения наибольшего эффекта при выходе катера на крылья при обеспечении его остойчивости и мореходности наклонные стабилизаторы носового и кормового ПК принимаются расширяющимися к краям с одновременно нарастающими углами атаки и увеличивающейся вогнутостью продольных профильных сечений. Угол наклона стабилизаторов в плоскости шпангоутов принимаем ~ 28°. Полный размах носового ПК по стабилизаторам принят равным 3,2 м, кормового – 2,6 м. Для уменьшения опасности прорыва воздуха к крылу на засасывающей поверхности наклонных стабилизаторов устанавливаются небольшие шайбы. На нагнетающей поверхности ПК для повышения устойчивости хода и противодействия дрейфу применяются вертикальные кильки. Крепление крыльев к корпусу катера осуществляется при помощи обтекаемых хорошо спрофилированных стоек и наклонных кронштейнов.
Среднее отстояние несущей части носового ПК от корпуса на максимальной скорости катера водоизмещением 2,8 т в соответствии с рис. 31 должно составлять h ≈ 0,3 м. Полученные ПК схематически представлены на рис. 35.
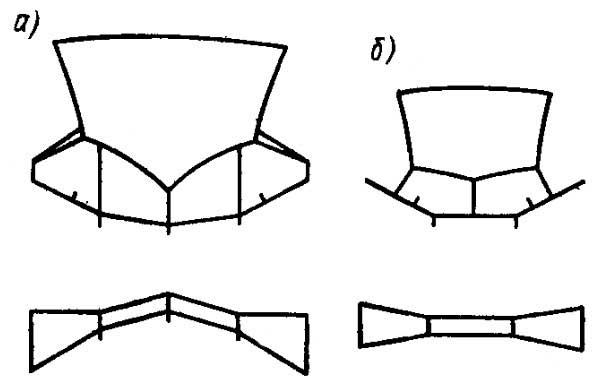
Профилировка ПК производится в соответствии с рекомендациями пункта “Определение основных элементов крыльевого устройства” выше (рис. 29, табл. 1). Для основной несущей плоскости носового крыла принимается острокромочный плоско-выпуклый сегментный профиль с приполненной входящей кромкой.
Предлагается к прочтению: Способы расчета управляемости маломерного судна
Наклонные стабилизаторы имеют острокромочный вогнуто-выпуклый сегментный профиль. У внешнего края стабилизатора вогнутость нагнетающей поверхности составляет 3 %. Для основной несущей плоскости кормового крыла может быть принят профиль Вальхнера.
Толщина профиля несущих плоскостей носового и кормового ПК принимается равной e = 16 мм. В этом случае относительная толщина профиля составит δ = 0,016/0,200 = 0,08.
Далее находим относительную кривизну средней линии профиля δ0 = 0,5δ = 0,5·0,08 = 0,04 и по формуле 2 угол нулевой подъемной силы профиля крыла a0 = -100δ0 = -100·0,04 = -4°.
Расчет коэффициента подъемной силы носового крыла на наибольшей скорости производим по формулам килеватого крыла (Формула 7).
Производная КПС килеватого крыла находится по рис. 11 при удлинении
:
Учитывая большую величину угла нулевой подъемной силы крыла a0 = -4°, угол атаки принимаем равным a = -0°30′ = – 0,5°.
Влияние глубины погружения на нулевой угол подъемной силы килеватого с помощью рис. 12: △a0 = 57,3·0,0073 = 0,42°.
Таким, образом, учитывая, что cos β = cos 9° ≈ 0,99, получим Cyкил = 0,061(-0,5+4/0,99-0,42) ≈ 0,19, что свидетельствует о достаточной сходимости расчета.
Расчет КПС кормового крыла ведем для относительной глубины погружения
, при которой его площадь с учетом погруженных частей стабилизаторов составляет около Sк ≈ 0,3 м:
Для определения производной
согласно формуле 5 по рис. 5, 7 и 8 находим входящие в нее параметры:
– по рис. 10;
Принимая угол атаки кормового крыла на максимальной скорости a = 0,5° и подставляя все известные величины в формулу 4, получим:
Дальнейшее уточнение характеристик носового и кормового ПК – углов атаки, глубин погружений, значений КПС и т. д. – производится в процессе ходовых испытаний катера.
Произведем расчет сопротивления данного катера при ходе его на крыльях с максимальной скоростью ν = 70 км/ч ≈ 19,5 м/с. Расчет выполняется в соответствии с рекомендациями и формулами пункта выше “Определение буксировочного сопротивления катеров на подводных крильях” для средних значений относительной глубины погружения, которая для обоих крыльев составляет
.
Вначале находим одинаковые для обоих ПК параметры, необходимые для определения сопротивления крыльев по формулам 28-33:
- – по рис. 15;
- – по рис. 7;
– по рис. 33;
- – по рис. 34.
Дальнейший расчет сопротивления носового и кормового крыльев произведен в табл. 3 для полученных новых значений Cyh.
| Таблица 3. Расчет сопротивления крыльев | ||
|---|---|---|
| Расчетный параметр | Численное значение | |
| Носовое крыло | Кормовое крыло | |
| Cyh | 0,19 | 0,247 |
| λ = b/b | 10,00 | 7,500 |
– рис. 5 | 0,09 | 0,068 |
– рис. 8 | 1,58 | 1,540 |
| 0,22 | 0,290 | |
| Cxпр – формула 30 | 11,3·10-3 | 11,55·10-3 |
| Cxi – формула 31 | 1,98·10-3 | 4,27·10-3 |
| Cxв – формула 32 | 0,12·10-3 | 0,21·10-3 |
| – | 0,012 | |
– формула 33 | – | 2,97·10-3 |
| 13,4·10-3 | 19·10-3 | |
| Rкр, Н – формула 28 | 1 020 | 1 080 |
Сопротивление выступающих частей определяем по формулам 34-38. Суммарная смоченная площадь стоек крыльев, кильков, противовоздушных шайб, кронштейна и руля ∑Sв.ч составляет ~ 0,32 м².
| Таблица 4. Приближенный расчет сопротивления КПК | ||||||
|---|---|---|---|---|---|---|
| Расчетный параметр | Численное значение | |||||
| FrV | 3,0 | 3,5 | 4,0 | 4,5 | 5,0 | 5,5 |
| ν = 3,72 FrV, м/с | 11,2 | 13,03 | 14,9 | 16,8 | 18,6 | 20,45 |
| νк = 3,6ν, км/ч | 40,3 | 46,9 | 53,6 | 60,3 | 67,0 | 73,6 |
| K = f(FrV) – | 8,4 | 8,2 | 7,8 | 7,5 | 7,0 | 6,7 |
| R = Vγ/K, H | 3 250 | 3 340 | 3 490 | 3 680 | 3 890 | 4 110 |
| NR = Rν, кВт | 36,3 | 43,5 | 52,0 | 61,9 | 72,6 | 84,1 |
Средний коэффициент брызгового сопротивления находим по формуле 36:
Поскольку Cxкав = 0, то коэффициент сопротивления всех выступающих частей без гребного вала согласно формуле 35 Cxв.ч = 2·1,1·5,3·10-3+1,8·10-3 = 13,45·10-3.
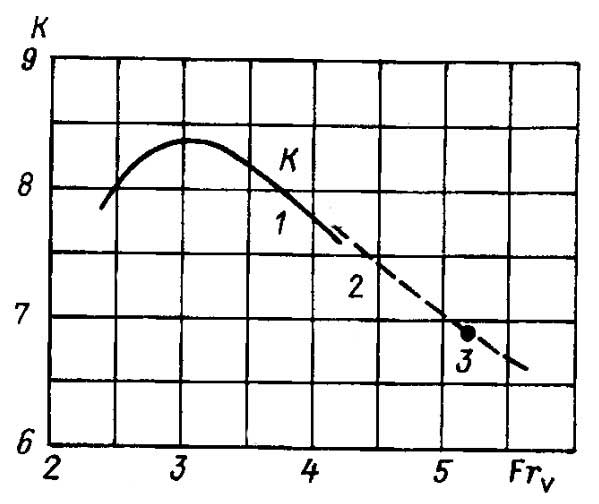
1 – катер-прототип; 2 – проект; 3 – теоретический расчет
При площади проекции гребного вала на плоскость шпангоута ~0,016 м² и коэффициенте сопротивления Cxвал ≈ 0,2 общее сопротивление всех выступающих частей катера составит:
Воздушное сопротивление находим по формуле 38, приняв коэффициент воздушного сопротивления Cа = 0,6, плотность воздуха ρа = 1,26 кг/м³ и площадь проекции КПК на плоскость миделя Sмид ≈ 3,2 м²: Rа = 0,6·0,5·1,26·19,5²·3,2 ≈ 460 Н.
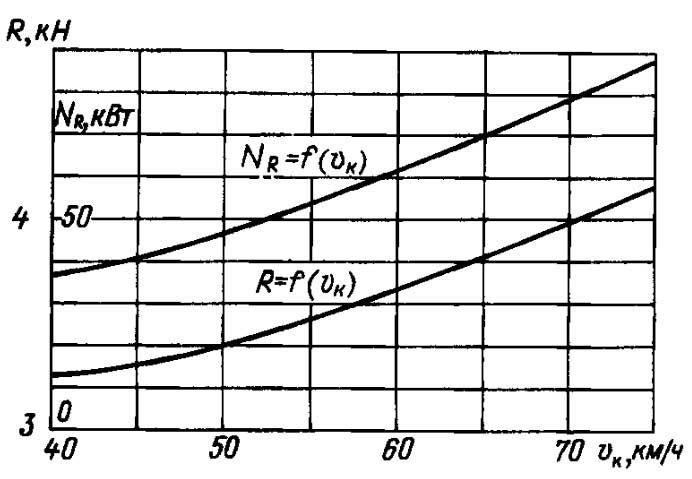
| Таблица 5. Расчет скорости и элементов кавитирующего гребного винта (Ne = 122 кВт; nДВ = 2 400 мин-1; n = 40 c-1; D = 0,36 м; w = 0,03; t = 0,04; ηк = 0,99; ηм = 0,97; D4 = 0,0168 м4; ρ = 1 000 кг/м3; ρn2D4(1-t) = 25,8 кН; Θ = 1,0; z = 3; δ = 0,03; δ1 = 0,045; p = 1,20) | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| № п.п. | Расчетный параметр | Численное значение | ||||||||||||
| 1 | νк, км/ч, – задаемся | 68,000 | 70,000 | 72,00 | 71,500 | |||||||||
| 2 | ν = 0,278νк(1-w), м/с | 18,360 | 18,900 | 19,44 | 19,300 | |||||||||
| 3 | R = f(νк), кН | 3,920 | 3,980 | 4,05 | 4,030 | |||||||||
| 4 | 1,275 | 1,313 | 1,35 | 1,340 | ||||||||||
| 5 | 0,616 | 0,582 | 0,55 | 0,558 | ||||||||||
| 6 | 1,170 | 1,190 | 1,21 | 1,200 | ||||||||||
| 7 | K1 – задаемся | 0,150 | 0,200 | 0,250 | 0,174 | 0,150 | 0,200 | 0,250 | 0,181 | 0,150 | 0,200 | 0,250 | 0,191 | 0,188 |
| 8 | 1,580 | 1,680 | 1,790 | 1,630 | 1,620 | 1,720 | 1,830 | 1,680 | 1,660 | 1,760 | 1,870 | 1.750 | 1,730 | |
| 9 | 0,700 | 0,708 | 0,701 | 0,707 | 0,701 | 0,711 | 0,703 | 0,710 | 0,703 | 0,712 | 0,706 | 0,712 | 0,712 | |
| 10 | 1,390 | 1,460 | 1,540 | 1,425 | 1,440 | 1,515 | 1,590 | 1,485 | 1,490 | 1,565 | 1,650 | 1,560 | 1,530 | |
| 11 | 0,916 | 0,872 | 0,827 | 0,895 | 0,912 | 0,867 | 0,825 | 0,884 | 0,905 | 0,862 | 0,817 | 0,866 | 0,875 | |
| 12 | 0,912 | 0,830 | 0,740 | 0,875 | 0,906 | 0,820 | 0,730 | 0,852 | 0,894 | 0,808 | 0,710 | 0,822 | 0,832 | |
| 13 | 0,976 | 0,964 | 0,950 | 0,972 | 0,976 | 0,962 | 0,950 | 0,968 | 0,975 | 0,960 | 0,947 | 0,960 | 0,962 | |
| 14 | 0,657 | 0,656 | 0,639 | 0,657 | 0,656 | 0,657 | 0,641 | 0,658 | 0,657 | 0,655 | 0,642 | 0,656 | 0,658 | |
| 15 | 3,530 | 4,280 | 4,770 | 3,930 | 3,500 | 4,230 | 4,710 | 3,980 | 3,460 | 4,170 | 4,580 | 4,050 | 4,030 | |
| 16 | 102,0 | 123,5 | 141,0 | 112,6 | 104,0 | 125,0 | 143,0 | 117,5 | 105,3 | 127,5 | 143,0 | 123,5 | 122,0 | |
Полное сопротивление КПК при ходе на крыльях со скоростью 70 км/ч определяем по формуле 27:
R = 1 020 + 1 080 + 1 420 + 460 = 3 980 H.
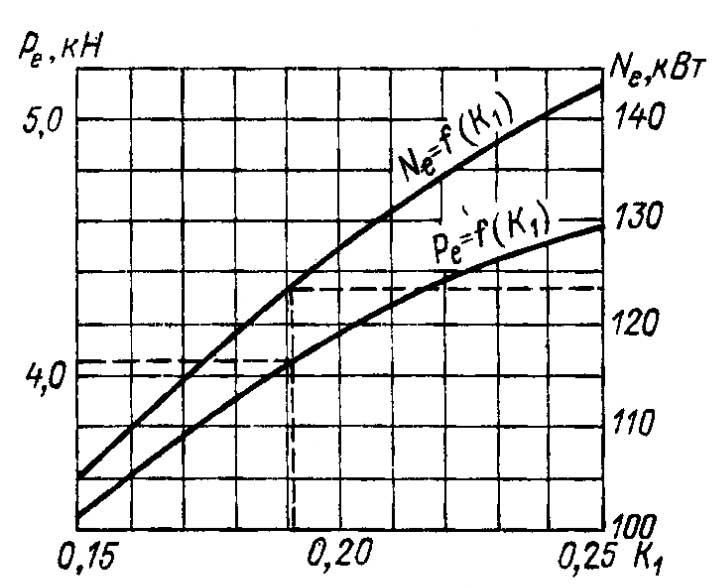

Скорости 70 км/ч соответствует FrV = 5,2. Гидродинамическое качество КПК при этом достигает K = 6,9. Как видно из рис. 36, данное значение качества лежит практически на продолжении кривой коэффициента гидродинамического качества быстроходного КПК типа “Невка“.
| Таблица 6. Расчет кривых действия гребного винта по паральному методу | ||
|---|---|---|
| № п.п. | Расчетный параметр | Численное значение |
| 1 | D, м | 0,360 |
| 2 | H, м | 0,580 |
| 3 | z | 3 |
| 4 | dc, м | 0,064 |
| 5 | R0, м | 0,108 |
| 6 | А, м2 | 0,102 |
| 7 | e1, м | 0,0123 |
| 8 | e2, м | 0,0041 |
| 9 | e = e1-e2, м | 0,0082 |
| 10 | b на R0, м | 0,273 |
| 11 | δ = e/b | 0,030 |
| 12 | δ0 – формула “Определение относительной толщины профиля к его хорде” | 0,030 |
| 13 | bср – формула “Определение средней ширины лопасти ГВ” | 0,230 |
| 14 | δ′ = e/bcp | 0,0357 |
| 15 | H/D | 1,61 |
| 16 | T0 = R0/R | 0,60 |
| 17 | Θ = A/Ad | 1,000 |
| 18 | R/bcp | 0,783 |
| 19 | β1 – формула 11 в статье “Характеристики гребных винтов – расчет гидродинамики” | 0,778 |
| 20 | β2 – формула 11 в статье “Характеристики гребных винтов – расчет гидродинамики” | 0,778 |
| 21 | H1/D = H/D + 4δ0 | 1,730 |
| 22 | tg ν1 – формула “Определение конструктивного шага сечения лопасти” | 0,918 |
| 23 | tg ν1 – формула 13 в статье “Характеристики гребных винтов – расчет гидродинамики” | 0,693 |
| 24 | a′ – формула 14 в статье “Характеристики гребных винтов – расчет гидродинамики” | 4,630 |
| 25 | m – формула 12 в статье “Характеристики гребных винтов – расчет гидродинамики” | 0,063 |
| 26 | x – формула 7 в статье “Характеристики гребных винтов – расчет гидродинамики” | 0,965 |
| 27 | q′ – формула 8 в статье “Характеристики гребных винтов – расчет гидродинамики” | 0,336 |
| 28 | F – формула 9 в статье “Характеристики гребных винтов – расчет гидродинамики” | 1,000 |
| 29 | p – формула 10 в статье “Характеристики гребных винтов – расчет гидродинамики” | 1,180 |
| 30 | 1,180 | |
| 31 | – формула 15 в статье “Характеристики гребных винтов – расчет гидродинамики” | 0,812 |
| 32 | A2 – формула 16 статье “Характеристики гребных винтов – расчет гидродинамики” | 0,190 |
| Таблица 6 (Продолжение). Расчет кривых действия гребного винта по паральному методу | ||||||
|---|---|---|---|---|---|---|
| № п.п. | Расчетный параметр | Численное значение | ||||
| 33 | s1 | 0,100 | 0,200 | 0,300 | 0,400 | 0,500 |
| 34 | s1 + m | 0,163 | 0,263 | 0,363 | 0,463 | 0,563 |
| 35 | σ – формула 17 в статье “Характеристики гребных винтов – расчет гидродинамики” | 1,000 | 1,004 | 1,009 | 1,015 | 1,0235 |
| 36 | λp – формула “Определение связи относительной поступи и скольжения винта” | 1,556 | 1,384 | 1,210 | 1,037 | 0,865 |
| 37 | 0,0812 | 0,163 | 0,246 | 0,330 | 0,415 | |
| 38 | 0,0310 | 0,0501 | 0,0696 | 0,0894 | 0,1094 | |
| 39 | ηp – формула 5 в статье “Характеристики гребных винтов – расчет гидродинамики” | 0,652 | 0,718 | 0,683 | 0,612 | 0,524 |
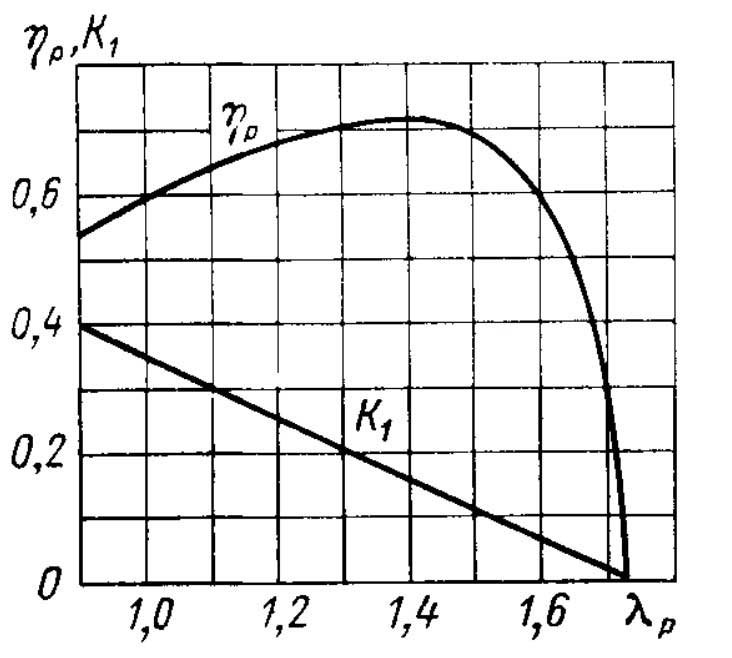
В силу этого пунктирная кривая, проведенная через указанную точку, с достаточной достоверностью может быть использована для расчета сопротивления проектируемого КПК во всем диапазоне скоростей при ходе на крыльях. Расчет произведен в табл. 4 по схеме, указанной выше в пункте “Приближенное определение сопротивления КПК”. Полученные зависимости сопротивления R = f(νк) и буксировочной мощности NR = f(νк) от скорости представлены на рис. 37 и используются в расчете ходкости КПК.
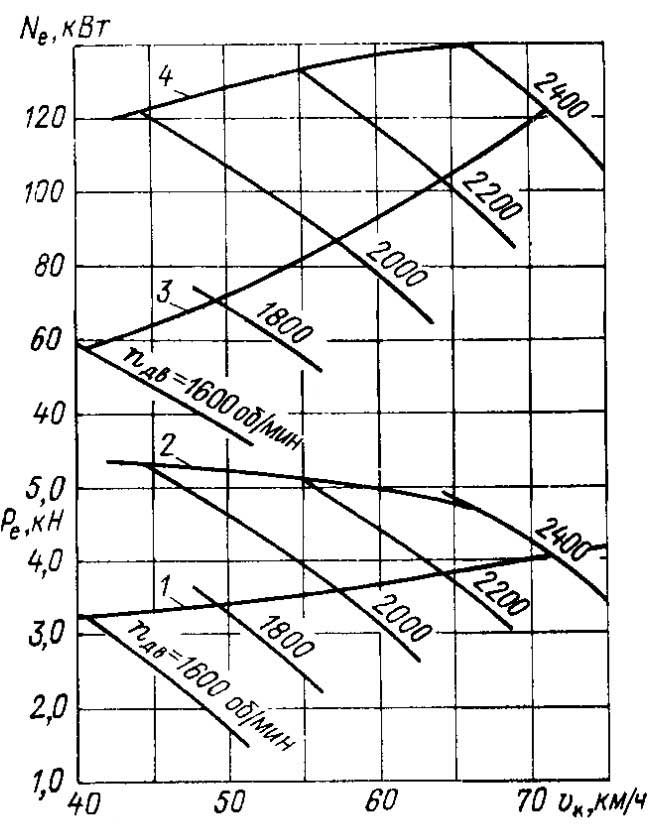
1 – кривая сопротивления КПК; 2 – предельная тяговая характеристика; 3 – винтовая характеристика; 4 – внешняя характеристика двигателя
| Таблица 7. Расчет паспортной диаграммы кавитирующего гребного винта | |||||
|---|---|---|---|---|---|
| Постоянный коэффициент | Расчетный параметр | Численное значение | |||
| w = 0,03; t = 0,04 | nдв, об/мин | 1 800 | 2 000 | 2 200 | 2 400 |
| ηм = 0,97; ηк = 0,99 | n, c-1 | 30,00 | 33,330 | 36,700 | 40,000 |
| ip = 1,0; p = 1,20 | 10-3pn2D4(1-t), кН | 14,50 | 17,900 | 21,660 | 25,800 |
| λp = 1,300; K1 = 0,200 | 52,20 | 58,000 | 63,700 | 69,600 | |
| ηp = 0,705; ηpηмηк = 0,676 | vк = 0,0223λpnдв, км/ч | 1,04 | 0,850 | 0,700 | 0,590 |
| λpk = 1,277uκδ | 1,29 | 1,366 | 1,443 | 1,500 | |
| 1,00 | 0,950 | 0,900 | 0,866 | ||
| 1,00 | 0,968 | 0,890 | 0,820 | ||
| 1,00 | 0,988 | 0,973 | 0,960 | ||
| 2,90 | 3,460 | 3,850 | 4,230 | ||
| 62,20 | 83,300 | 103,6 | 126,500 | ||
Расчет элементов гребного винта и скорости катера
Для облегчения условий эксплуатации двигателя и обеспечения выхода КПК на крылья в условиях волнения расчет скорости и элементов ГВ производится для режима работы двигателя Ne = 122 кВт при 2 400 об/мин, что создает 15%-ный запас мощности. Диаметр ГВ принимаем равным максимально допустимому D = 0,36 м, так как согласно рис. Гребные винты малотоннажных судов“Зависимость диаметра ГВ от частоты его вращения и мощности двигателя” он должен превышать 0,4 м. Поскольку предварительный расчет показал, что винт является кавитирующим, то дисковое отношение Θ = 1.
Условные коэффициенты взаимодействия винта и корпуса определяем по формулам Гребные винты малотоннажных судов“Определение значений коэффициентов w и t“ с учетом угла наклона гребного вала υ = 13° и угла ходового дифферента ψ ≈ 3°:
Расчет скорости и элементов ГВ произведен в табл. 5 в соответствии с рекомендациями статей Гребные винты малотоннажных судов“Кавитация гребного винта” и Гребные винты малотоннажных судов“Проектирование гребных винтов”. При этом использована расчетная диаграмма трехлопастных ГВ с дисковым отношением Θ = 1, относительной толщиной эквивалентного профиля δ = 0,03 и кривизной засасывающей стороны δ1 = 0,045. Кавитационные характеристики определены с помощью рис. Гребные винты малотоннажных судов“Зависимости uкδ = f(k, δ)” и Гребные винты малотоннажных судов“Диаграмма кавитационных характеристик ГВ при δ1 = 0,048″. В силу весьма большого угла скоса потока коэффициент ускорения кавитации p = 1,2.
Для определения необходимых значений коэффициентов упора K1, для каждой скорости производилось построение зависимостей
Pe = f(K1)
и Ne = f(K1).
Пример такого построения для скорости 72 км/ч приведен на рис. 38. С целью проверки полученных значений в дополнительных четвертых столбцах таблицы для каждой заданной скорости произведены контрольные расчеты.
Графические зависимости
Pe = f(K1)
, Ne = f(K1) и K1 = f(vк), построенные на рис. 39 по результатам контрольных расчетов, показывают, что при мощности двигателя 122 кВт наибольшая скорость катера составляет около 71,5 км/ч. Необходимое шаговое отношение ГВ находится аналогичным построением или проверочным расчетом в последнем столбце табл. 5.
В целях уточнения всех характеристик и элементов ГВ в табл. 6 произведен расчет его кривых действия по паральному методу. Полученные кривые действия представлены на рис. 40 и используются при расчете паспортной диаграммы.
Читайте также: Особенности гидродинамики глиссирующих катамаранов
Расчет и построение паспортной диаграммы выполняются в соответствии с рекомендациями статьи Гидродинамические характеристики ГВ и технология построения паспортных диаграмм“Характеристики гребных винтов – расчет гидродинамики” для нескольких значений поступи ГВ λp = 1,2 ÷ 1,4 при различных частотах его вращения. Пример такого расчета для λp = 1,3 приведен в табл. 7. По результатам расчета на рис. 41 построена паспортная диаграмма, с помощью которой можно установить, что уточненная скорость КПК составит около 71,2 км/ч. Таким образом, расчет показывает, что заданная скорость проектируемого КПК νк = 70 км/ч при располагаемой мощности двигателя Ne = 140 кВт будет обеспечена с достаточным запасом на состояние погоды и изменение нагрузки.
Спроектированный ГВ имеет следующие основные элементы:
| Диаметр D, м | 0,36 |
| Шаг H, м | 0,58 |
| Шаговое отношение H/D | 1,61 |
| Дисковое отношение Θ | 1,00 |
| Число лопастей z | 3 |
Профиль сечений лопасти — вогнуто-выпуклый сегмент.
Далее определяются необходимые конструктивные элементы ГВ и строятся его рабочие чертежи.





