Существенная локализация отдельных повреждений и развитие глубоких пластических деформаций определяют необходимость построения решений в геометрически нелинейной постановке, описания факторов взаимодействия деформируемой конструкции с окружающими ее неповрежденными участками перекрытия. Для описания работы конструкции в локализованной деформированной зоне неправомочно использование балочной идеализации и представлений о цилиндрическом изгибе пластины (модель балки-полоски), поскольку в области больших пластических прогибов решающее значение могут иметь эффекты поддерживающего влияния пластин наружной обшивки, деформирующихся вместе с балочными (вмятина) или пластинчатыми (вмятина-выпучина) элементами.
При этом различие в жесткостях пластин наружной обшивки и примыкающего к ней набора приводит в ряде случаев к необходимости отказа от традиционно используемой в задачах о глубоком пластическом деформировании гипотезы о жесткопластическом материале в пользу учета упругих свойств отдельных элементов конструкции.
Изложенное в значительной мере объясняет отсутствие разработанных с достаточной полнотой и на единой основе методов расчета деформированного состояния конструкций ледовых усилений в области больших пластических деформаций. Обращаясь к исследованию данного круга вопросов, отметим следующее.
Построение достаточно строгих численных решений, учитывающих физическую и геометрическую нелинейность, локальность нагружения и распространяющихся на область глубокого пластического деформирования, является сложной задачей. Реализация конечно-разностных алгоритмов в сочетании с обусловленными нелинейностью итерационными процедурами в области глубокого пластического деформирования сопровождается хорошо известными математическими трудностями. Разработанные на их основе программы будут носить исследовательский характер, а для выполнения практических расчетов целесообразно использовать методики, построенные на основании упрощенных алгоритмов.
Поэтому в настоящей статье реализован путь создания инженерных методов, базирующихся на приближенных расчетных моделях, учитывающих тем не менее основные факторы, влияющие на деформированное состояние поврежденных конструкций. Возможности широкого использования приближенных моделей и упрощающих допущений при описании работы конструкций в области глубокого пластического деформирования определяются следующими обстоятельствами:
Совместное деформирование нескольких балок и наружной обшивки (панели), работающих в составе перекрытия, в процессе образования вмятины.
Совместное деформирование листовой конструкции и наружной обшивки в процессе образования вмятин-выпучины.
Расчетные модели, формируемые на основании перечисленных схем образования отдельных повреждений, должны содержать ограничения на горизонтальные (в направлении оси балки или срединной поверхности пластины) и угловые перемещения по контуру деформированной зоны составляющих конструкцию элементов. Структура данных ограничений определяется из условия совместности работы деформированной конструкции с неповрежденными участками перекрытия.
На основании изложенного могут быть сформулированы следующие общие требования к расчетным моделям, описывающим процесс глубокого пластического деформирования конструкций ледовых усилений:
Модели базируются на приближенных инженерных подходах, учитывающих особенности глубокого пластического (запредельного) деформирования конструкций в процессе образования характерных типов отдельных повреждений под действием локальных ледовых нагрузок.
Положенные в основу моделей решения строятся в геометрически нелинейной постановке, с учетом взаимодействия деформированной области с окружающими ее незагруженными участками.
При разработке расчетных моделей, отвечающих перечисленным требованиям, будет использоваться следующая общая методология:
Построение решения о предельном равновесии жесткопластической конструкции в геометрически линейной постановке, т. е. в рамках аппарата теории предельного равновесия.
Обоснование принципов решения задач о деформировании жестко-пластических конструкций в геометрически нелинейной постановке. Распространение жесткопластических линейных решений на геометрически нелинейную запредельную стадию.
Разработка приближенных расчетных моделей, позволяющих учитывать упругие свойства элементов конструкций в рамках жесткопластического решения.
Специальноеэкспериментальное исследование особенностей деформирование конструкций, обеспечивающее проверку и уточнение основных допущений расчетных моделей. Построение расчетных моделей в рамках сформулированной общей методологии составляет основное содержание настоящей главы.
Методы расчета прочности конструкций из жесткопластического материала в геометрически нелинейной постановке
Основные положения теории предельного равновесия конечномерных систем
Высокая пластичность применяемых в судостроении сталей, а также наличие у большинства из них развитой площадки текучести обуславливают возможности использования для анализа работы корпусных конструкций за пределом упругости аппарата теории идеальной пластичности, базирующейся на гипотезе об идеальном жесткопластическом материале (рис. 1, а). В качестве прикладной стороны теории пластичности широкое распространение получила теория предельного равновесия (ТПР). В первых работах по ТПР, относящихся к началу XX века, описывались процессы перераспределения внутренних усилий (изгибающих моментов) в неразрезных балках. Строгое обоснование экстремальных теорем ТПР (статической, кинематической и теоремы единственности) было впервые представлено А. А. Гвоздевым.
Рис. 1 Диаграммы деформирования идеального материала в физических а, б и обобщенные в, г напряжениях и деформациях: а, б – жесткопластические материалы; б, г – упругопластические материалы
Данная работа, а также ряд последующих исследований А. А. Гвоздева долгое время оставались неизвестными за рубежом. Поэтому основные принципы ТПР в дальнейшем независимо развивались в работах Д. Друкера, В. Прагера, Ф. Ходжа, Р. Хилла и др. Среди российских ученых заметный вклад в развитие ТПР внесли А. Р. Ржаницын, Б. М. Бродде, А. И. Стрельбицкая, Д. Д. Ивлев, Ю. Н. Работнов и др. Среди работ, посвященных применению аппарата линейного программирования для анализа предельного равновесия сложных конструкций следует отметить исследования A. Chames, А. Чираса, А. Р. Ржаницына, В. Прагера, А. М. Проценко. Вопросами применения ТПР к расчетам судокорпусных конструкций занимались Л. М. Беленький, В. В. Козляков, Н. Ф. Ершов и О. И. Свечнинов, И. Л. Дикович, А. М. Бененсон и В. А. Курдюмов и др.
Рассмотрим основные положения ТПР с позиций сформулированной в разд. см. “Принципы построения расчетных моделей” задачи построения методов расчета прочности конструкций из жесткопластического материала в геометрически нелинейной постановке.
В ТПР в качестве предельного рассматривается такое Дополнительные или усиленные конструкции корпуса суднасостояние конструкции, при котором впервые с момента нагружения становится возможным возрастание пластических деформаций при постоянной внешней нагрузке. Такое состояние было названо А. А. Гвоздевым пластическим механизмом в виду определенной аналогии с кинематическими механизмами, рассматриваемыми в теоретической механике. Возникновение пластического механизма обуславливается образованием в конструкции необходимого числа пластических шарниров (шарниров текучести), соединенных жесткими элементами.
Поэтому деформируемую таким образом конструкцию можно рассматривать как конечномерную систему, характеризуемую следующими свойствами:
Система находится в состоянии равновесия, а усилия в пластических шарнирах не превосходят некоторых предельных величин.
Система может деформироваться без изменения внешних и внутренних сил.
Деформации системы настолько малы, что не нарушают ее конфигурации и геометрических связей.
Дадим теперь более строгие определения, характеризующие предельное состояние, часть из которых используется и в теоретической механике, но в применении к конечномерным деформируемым системам имеет определенную специфику.
Будем считать, что все составляющие внешней нагрузки, приложенной к конечномерной системе, изменяются пропорционально одному параметру, т. е. реализуется условно простое нагружение.
В конечномерной системе может образовываться конечное число пластических механизмов. Минимальное число n линейно независимых параметров u1,…,un, с помощью которых могут быть описаны состояния всех пластических механизмов, будем называть числом степеней свободы статически деформируемой системы, а сами параметры u1(i = 1,…, n) – обобщенными перемещениями.
Деформируемая система может иметь m в общем случае нежестких связей, перемещения вдоль которых будем называть внутренними обобщенными деформациями θ1,…, θm. Отметим, что в данном случае термин обобщенный следует трактовать в том смысле, что под деформациями понимаются конечно-локальные (интегральные) Обозначение судовых технических величинфизические величины: угол слома оси балки в пластическом шарнире, удлинение оси в шарнире и т. п.
Из обобщенных деформаций θj(j = 1,…, m) всегда можно выделить n независимых (n < m), которые названы обобщенными перемещениями u1, а остальные определить как их функции:
или
где:
– вектор обобщенных перемещений.
В рамках представлений теоретической механики, оперирующей с жесткими связями, при условно простом нагружении каждый отдельный пластический механизм имеет одну степень свободы (n = 1) и соответственно одно обобщенное перемещение. У деформируемой системы, в которой, как будет показано ниже, возможно изменение длин связей, для описания состояния механизма может потребоваться введение нескольких обобщенных перемещений.
В ТПР, базирующейся на допущении о малости перемещений, рассматривается линейный вариант соотношений (Формула 2):
где:
– вектор обобщенных деформаций;
[Н] – прямоугольная матрица размером m × n.
Обобщенным деформациям соответствуют обобщенные внутренние силы (напряжения):
Вариация работ внутренних сил на малых деформациях системы с учетом (Формула 3) определится следующим образом:
Зависимость между обобщенными усилиями и деформациями устанавливается диаграммой деформирования идеального жесткопластического материала, в которой вместо напряжений и деформаций фигурируют их обобщенные величины (см. рис. 1, в). Согласно данной зависимости обобщенные деформации равняются нулю, если обобщенные силы меньше некоторых предельных значений, и обобщенные деформации не ограничены, если обобщенные силы равны предельным значениям. Обобщенные силы не могут быть больше предельных.
Пусть конечномерная система имеет c пластических шарниров, соединяющих между собой Листовые конструкции корпуса суднажесткие части. Для каждого пластического шарнира может быть задано уравнение пластичности, описывающее поверхность, на которой обобщенные силы, действующие в шарнире, принимают предельные значения:
Область, ограниченная поверхностью пластичности, обязательно включает нулевую точку и задается неравенством:
В совокупности формулы 6 и 7 определяют условия пластичности конечномерной системы пластичности.
где:
– вектор-функция пластичности.
В отношении внешней нагрузки для рассматриваемого далее класса задач можно вполне обоснованно полагать, что она отвечает требованиям условно простого нагружения, полностью характеризуется величиной параметра p, совершает работу на перемещении ν. В ТПР аналогично (Формула 3) рассматривается вариант линейной зависимости ν от обобщенных перемещений
где:
– вектор.
Приращение работ внешних сил на малых перемещениях деформируемой системы
Обычно реализуемое допущение о дифференцируемости величин {V}, {θ}, ν по некоторому условному времени, т. е. любому монотонно возрастающему параметру, например, параметру внешней нагрузки р, позволяет ввести скорости обобщенных деформаций и перемещений
. Современная ТПР построена на рассмотрении мгновенных скоростей, возникающих в момент образования пластического механизма. Физический смысл перехода к скоростям определяется следующими соображениями. В ТПР допускаются только малые перемещения, имеющие место в момент образования пластического механизма. Это требование, вытекающее из геометрически линейной постановки (Формула 3), (Формула 9), вступает в противоречие со следующей особенностью предельного равновесия Интегрированные системы управления судоходствомсистемы: перемещения пластического механизма задаются с точностью до неопределенного множителя и, следовательно, могут быть сколь угодно большими.
Для снятия данного противоречия используется в некоторой мере условный прием, связанный с переходом к скоростям. Считается, что в момент образования пластического механизма перемещения отсутствуют, а мгновенные скорости пластических деформаций, также устанавливаемые с точностью до неопределенного множителя, могут быть сколь угодно велики, что не противоречит геометрически линейной постановке. С практической точки зрения в рамках линейной постановки построение ТПР в скоростях или перемещениях приводит к абсолютно тождественным результатам.
При переходе к скоростям вместо работ внешних и внутренних сил вводятся мощность внешних сил и мощность рассеивания (диссипации) внутренней энергии:
В качестве общего принципа в ТПР используется постулат Друкера, утверждающий, что при заданных скоростях пластической деформации действительная мощность диссипации максимальна:
где:
– действительные и любые допустимые, т. е. удовлетворяющие уравнениям равновесия и условиям пластичности, внутренние силы.
Следствиями постулата Друкера являются ассоциированный закон пластического течения и экстремальные теоремы ТПР.
Согласно закону пластического течения, ассоциированному с условием пластичности (Формула 8), вектор обобщенной пластической деформации направлен по нормали к поверхности пластичности:
где:
{λ} – вектор неотрицательных множителей.
Экстремальные теоремы ТПР включают следующие понятия:
Статически допустимыми называются внутренние силы, удовлетворяющие при заданной внешней нагрузке уравнениям равновесия и не нарушающие условий пластичности.
Кинематически допустимому пластическому механизму соответствует поле скоростей обобщенных перемещений, удовлетворяющее граничным условиям и обеспечивающее неотрицательность работы внешней нагрузки на данных перемещениях.
Согласно кинематической теореме предельная нагрузка является минимальной из всех нагрузок, соответствующих кинематически допустимым пластическим механизмам.
Согласно теореме единственности существует единственная предельная нагрузка системы, являющаяся одновременно максимальной из всех внешних нагрузок, уравновешивающих статически допустимые внутренние силы и минимальной из всех нагрузок, соответствующих кинематически допустимым пластическим механизмам.
Представленные теоремы определяют математические формулировки статического и кинематического методов расчета предельной нагрузки. В результате полного решения задачи находится величина предельной нагрузки, внутренние усилия и поле скоростей пластического механизма (с точностью до неопределенного множителя).
Возвратимся к вопросу о полях скоростей и перемещений пластического механизма. Изложенный способ снятия противоречия между допущением о малости деформаций и неопределенностью их величин путем перехода к рассмотрению мгновенных скоростей приводит к противоречию иного плана. Действительно, физической основой ТПР является способность конструкции в процессе развития пластических деформаций перераспределять внутренние усилия и при достижении определенного уровня нагруженности превращаться в пластический механизм.
Очевидно, что предположение об отсутствии пластических деформаций и рассмотрение мгновенных скоростей пластического механизма вступает в противоречие с указанной физической основой. Таким образом, если построению ТПР в перемещениях свойственны отмеченные противоречия логического характера, то в скоростях – физического.
При этом важно подчеркнуть, что применительно к условно простому нагружению и геометрически линейной постановке различия между данными вариантами формальны и оба варианта приводят к тождественным конечным результатам.
Рассмотрим вариант построения ТПР в перемещениях {u}, {θ}, ν. Применяя принцип возможных перемещений к состоянию предельного равновесия пластического механизма, получим:
Полагая
и учитывая, что возможные перемещения линейно независимы, придем к следующей разрешающей системе, соответствующей записи принципа возможных перемещений в дифференциальной форме:
Отметим, что при использовании (Формула 16) функции U и А должны быть выражены через обобщенные перемещения.
Подставляя в формулу 16 выражения (Формулы 3, 5, 10), и учитывая закон пластического течения (Формула 13) (с подстановкой в него (Формула 3) и заменой скоростей на перемещения), на основании кинематической теоремы получим следующую общую формулировку задачи отыскания предельной нагрузки кинематическим методом:
min p; Форм. 17
Отметим, что вытекающее из формулы 16 уравнение (Формула 18) представляет собой уравнение равновесия.
Решение (Формул 17-20) предполагает, в общем случае, использование аппарата линейного программирования. Однако применительно к рассматриваемым в настоящей работе задачам формулировка кинематического метода может быть существенно упрощена.
Пусть из анализа особенностей деформирования конечномерной системы установлено, что при ее переходе в предельное состояние возможно образование конечного числа v пластических механизмов. При этом для каждого μ-го механизма с полем перемещений
заранее известно положение пластических шарниров. Тогда (Формула 20) приобретает вид:
С учетом формулы 21 вместо (Формул 17-20) будем иметь следующую формулировку кинематического метода:
где:
Реализация (Формул 22-25) осуществляется в следующей последовательности. Из совместного решения (Формулы 22, 23) находятся вектор внутренних усилий {pμ}, удовлетворяющих уравнениям равновесия и пластичности, а также Общий продольный изгиб и общая продольная прочность корпусных конструкций суднапредельная нагрузкаμ-го пластического механизма pμ. Решение формулы 24 при известном {q}μ позволяет определить вектор {λ}, а также обобщенные перемещения {u}μ с точностью до неопределенного множителя (например,
)
. Подчеркнем, что для определения предельной нагрузки решение (Формула 24) не требуется. После выполнения указанных процедур для всех v пластических механизмов на основании формулы 25 определяются истинные предельная нагрузка
и пластический механизм μ0.
Целесообразность использования упрощенного подхода (Формулы 22-25) для определения предельных нагрузок конструкций, у которых достаточно обоснованно могут быть заданы поля перемещений пластических механизмов, отмечается в специальной литературе.
Изложенных сведений по ТПР в целом достаточно для обсуждения применимости ее подходов к решению геометрически нелинейных задач.
Учет геометрически нелинейных факторов при описании запредельного деформирования конструкций
Отдельные исследования работы жесткопластических систем с учетом геометрически нелинейных факторов к настоящему времени не сложились в законченную теорию. Представленные ниже результаты анализа позволяют с более общих позиций подойти к обоснованию принципов построения инженерных методов расчета конструкций при глубоком пластическом деформировании в геометрически нелинейной постановке.
Общая посылка к созданию таких методов базируется на следующих соображениях. Как известно, ТПР можно трактовать как частный случай теории малых упругопластических деформаций (ТМД), применимой для описания работы конструкций в области малых пластических деформаций при простом нагружении. Хотя достоверность основных гипотез ТМД подтверждается только в области ограниченной текучести, существующий опыт расчетов свидетельствует, что на базе ТМД применительно к судокорпусным конструкциям (Конструкция судовых перекрытийтонкостенные балки, пластины при цилиндрическом изгибе (балки-полоски)) получены решения, в том числе и геометрически нелинейные, демонстрирующие хорошее согласование с результатами экспериментальных исследований и в области глубокого пластического деформирования.
Такие выводы содержатся, например, в работах, посвященных анализу упругопластического деформирования балок-полосок. Применительно к балочным конструкциям ледовых усилений хорошее согласование теоретических, согласно ТМД, и экспериментальных величин деформаций при изгибно-сдвиговом характере напряженно-деформированного состояния установлено автором. Наряду с этим существует представительное экспериментальное обоснование возможностей использования упрощенных жесткопластических моделей для описания работы балок и пластин в области больших прогибов.
Изложенное позволяет провести определенную аналогию между применимостью ТМД и подходов ТПР к расчетам конструкций в области больших пластических деформаций в совокупности с естественным требованием последующей экспериментальной проверки.
Принцип возможных перемещений в форме (Формула 16), постулат Друкера (Формула 12) и базирующееся на нем доказательство кинематической теоремы, а также ассоциированный закон пластического течения (Формула 13) распространяются и на геометрически нелинейные системы. Поэтому подход к формированию разрешающей системы кинематического метода в целом сохраняется, только вместо линейных соотношений между {θ}, ν и {u} (Формула 3), (Формула 9) вводятся следующие нелинейные зависимости:
Однако теорема единственности справедлива только для геометрически линейных систем. Поэтому говорить о точном значении предельной нагрузки, полученном в результате совпадения нагрузок, определенных статическим (нижняя оценка) и кинематическим (верхняя оценка) методами, применительно к геометрически нелинейной постановке некорректно.
С учетом формулы 26 разрешающая система для кинематического метода в упрощенном варианте (Формулы 22-25) принимает вид:
где:
Как видно, различие геометрически линейной и нелинейной постановок проявляется в замене линейной системы (Формула 22) на нелинейную систему алгебраических уравнений (Формула 27). В результате совместного решения (Формулы 27-29) определяются (n-1) обобщенное перемещение, элементы вектора {q}μ и Оценка общей площади судовпараметр нагрузкирμ в зависимости от обобщенного перемещения
, рассматриваемого в качестве независимого параметра:
Зa
может быть принято любое из обобщенных перемещений {u}μ, однако соображения удобства представления результатов решения определяют целесообразность выбора в качестве
наиболее характерного для рассматриваемого пластического механизма перемещения (например, максимальный прогиб конструкции в направлении действия нагрузки).
Решение (Формул 32-34) в совокупности с формулой 26 полностью определяют деформированное состояние g-го пластического механизма при заданном значении
. В пределе, при
система (Формул 27-30) приводит к тому же результату, что и при геометрически линейной постановке:
где:
– предельная нагрузка, определяемая из решения формул 22-24
Таким образом, при геометрически нелинейной постановке обобщенные перемещения пластического механизма определены в зависимости от одного из перемещений
Все рассуждения строились применительно к конечномерным системам, характеризуемым конечными числами обобщенных перемещений n и пластических механизмов ν. Однако при рассмотрении работы конструкций под действием локальных нагрузок типичной является ситуация, когда границы деформированной зоны заранее неизвестны, т. е. положение части пластических шарниров неопределенно.
Введем вектор геометрических размеров (координат), заданием которых полностью определяется положение всех пластических шарниров и соответственно полей перемещений пластических механизмов рассматриваемой конструкции, а также наложим на элементы вектора, как правило, имеющую место систему ограничений:
где:
δ – произвольно.
При фиксированных значениях элементов вектора {r} имеет место исследованный случай конечномерной системы, в которой может образовываться конечное число v пластических механизмов с полями перемещений {u}. Для μ-го пластического механизма (μ = 1,…, ν) может быть получено решение (Формулы 32-34), но при этом его деформированное состояние будет являться функцией не только независимого параметра
, но и элементов вектора {r}:
Поскольку, в действительности вектор {r} не определен, то под v можно понимать число типов пластических механизмов, причем каждый μ-й тип (μ = 1,…, ν) включает бесконечное число пластических механизмов, образуемых бесконечным множеством значений {r}, но имеющих одинаковую форму перемещений (Формула 39).
Изложенными рассуждениями сформулировано понятие конечно-континуальной системы, характеризуемой конечным числом типов пластических механизмов, но бесконечным числом пластических механизмов в рамках одного типа.
Для определения истинных значений {r} для μ-го типа используется вытекающее из кинематической теоремы условие минимума предельной нагрузки. С учетом данного условия применительно к конечно-континуальной системе вместо (Формул 27-30) получим следующую формулировку кинематического метода:
где:
Для удобства численного решения системы (Формулы 41-47) целесообразно выполнить ряд преобразований. Из первого уравнения (Формула 41) (i = 1) следует:
Подставляя формулу 48 в формулу 44 и учитывая, что
Зависимости (Формула 57) дают полное представление о деформированном состоянии конструкции, отвечающем заданному значению независимого параметра u1.
Введем еще одно расширение задачи. Пусть пластический механизм μ-го типа деформируется совместно с некоторой упругой конструкцией, деформированное состояние которой характеризуется векторами обобщенных деформаций {α} и внутренних сил {g}, а также величиной упругой работы Е:
Будем полагать, что элементы вектора {а} могут быть выражены через обобщенные перемещения {u}μ и вектор размеров {r} пластического механизма, а условия совместности деформирования дают необходимое число уравнений для раскрытия статической неопределимости системы пластический механизм – упругая конструкция относительно внутренних сил {g}:
В идеальных упругопластических системах остаются в силе экстремальные принципы теории предельного равновесия. Поэтому для получения решения в рассматриваемом случае достаточно разрешающую систему (Формулы 50-56) дополнить уравнениями (Формула 59), а также в уравнениях (Формулы 5-52) заменить работу внутренних сил пластического механизма
на величину
В математическом плане решение системы (Формулы 50-56) и (Формула 59) связано с выполнением процедур численного дифференцирования и решения систем нелинейных алгебраических уравнений с помощью итерационных методов. Поскольку получение устойчивых итерационных алгоритмов с ростом числа нелинейных уравнений в значительной степени усложняется, целесообразно использовать возможности теоретического анализа с целью понижения размерности разрешающей системы.
Способы описания работы материала в пластических шарнирах будут изложены непосредственно в процессе решения практических задач. В настоящем пункте рассмотрим с достаточно общих позиций работу материала в шарнирах текучести.
Учитывая изложенные в разд. см. “Принципы построения расчетных моделей” соображения относительно принципов формирования расчетных моделей, будем также основываться на представлениях о прямолинейных шарнирах текучести.
Примем следующие допущения:
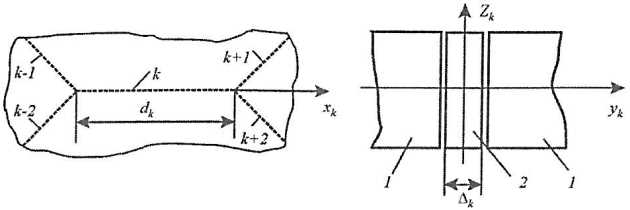
Переход конструкции в предельное состояние сопровождается превращением ее в пластический механизм, состоящий из жестких частей, соединенных прямолинейными шарнирами текучести, совпадающими с ребрами двугранных углов перелома деформированной поверхности (рис. 2).
Ширина шарнира текучести △ считается бесконечно малой (см. рис. 2).
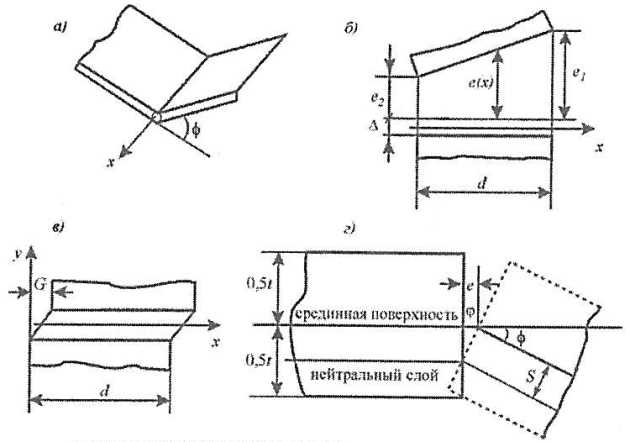
В шарнире текучести допускаются следующие перемещения (обобщенные деформации): ф – угол слома в шарнире текучести (рис. 3, а); е – удлинение (укорочение) срединной поверхности в шарнире текучести (см. рис. 3, б); G – сдвиг в шарнире текучести (см. рис. 3, в).
Рис. 2 Пластический механизм, состоящий из жестких частей 1, соединенных прямолинейными шарнирами текучести 2: – – – – – линии шарниров текучестРис. 3 Перемещения в шарнирах текучести
Введение перемещений е отражает учет геометрической нелинейности, связанной с возникновением в срединной поверхности усилий и деформаций.
В результате поворот жестких частей относительно друг друга осуществляется вокруг нейтральной оси, отстоящей от срединной поверхности шарнира текучести на расстоянии (см. рис. 3, г)
Из условия прямолинейности шарнира текучести следует:
где:
e1, е2 — удлинения в начальной и конечной точках шарнира текучести;
d – длина шарнира текучести;
x – координатная ось, направленная вдоль шарнира текучести.
Связь между перемещениями и деформациями (физическими) в шарнире текучести установим в рамках теории Кармана. Принимая координатные оси в соответствии с рис. 2, обозначим традиционно:
u, ν, w – перемещения точек шарнира текучести в направлении осей x, y, z;
— элементы тензора деформаций, рассматриваемые в теории Кармана;
– элементы тензора напряжений, рассматриваемые в теории Кармана;
– перемещения и деформации срединной поверхности.
Согласно формулам Кирхгофа,
На основании гипотезы прямых нормалей
где:
– кривизны срединной поверхности;
– кручение срединной поверхности.
В силу прямолинейности шарниров текучести
Перемещения точек срединной поверхности шарнира текучести с точностью до бесконечно малых второго порядка:
Подстановка формулы 67 в формулу 63 дает
Предположение о бесконечной малости △ позволяет осуществить следующий предельный переход:
откуда
С учетом формул 65, 69 получим следующие выражения для деформаций:
На основании формул 70 и 71 выражение для интенсивности деформаций примет вид:
Примем традиционно используемое для судокорпусных материалов условие текучести Губера – Мизеса о постоянстве интенсивности напряжений
Тогда выражения для работы внутренних сил на элементе длины шарнира dUш и полной работы внутренних сил в шарнире текучести Uш соответственно примут вид:
При решении рассматриваемых в настоящей статье практических задач потребуется рассмотрение следующих двух частных случаев.
1Изгибно-продольный шарнир текучести, в котором отсутствуют перемещения сдвига. В этом случае
и интегрирование формул 74, 75 дает
где:
2Изгибно-продольно-сдвиговой шарнир текучести с постоянным удлинением срединной поверхности. В этом случае e (x) = e const и интегрирование (Формула 75) приводит к следующим выражениям:
где:
Изложенный подход к определению работ внутренних сил, в определенной мере аналогичный, позволяет с достаточно общих и последовательных позиций описать работу материала в шарнире, как в континуальной системе. Отметим, что полностью тождественный результат может быть получен на основании введенных представлений об обобщенных деформациях и внутренних силах конечномерной системы. Это свидетельствует о правомерности замены континуальной системы конечномерной.
Геометрическая нелинейность, связанная с возможностью появления удлинений (укорочений) срединной поверхности в шарнирах текучести, приводит к изменению геометрических размеров конструкции и, в связи с этим, вносит определенные особенности в процедуру определения работы внешней нагрузки и назначения обобщенных перемещений системы. Сформулируем по этому поводу следующие соображения.
Рис. 4 Учет изменения геометрических размеров механизма при вычислении работ внешних сил. 1 – жесткие части; 2 – шарнир текучести
Следовательно, в этом случае работа внешних сил может вычисляться без учета изменения геометрических размеров за счет нелинейных факторов, а величина е рассматривается в качестве обобщенной деформации и находится из уравнения связей.
Если нагрузка действует в плоскости срединной поверхности, то она совершает работу непосредственно на перемещении е (см. рис. 4, б). Поэтому в этом случае необходимо учитывать изменения геометрических размеров связей за счет нелинейных факторов, а само перемещение е следует рассматривать как обобщенное. Т.е. учет геометрической нелинейности может приводить к увеличению степеней свободы пластического механизма.
Таким образом, полученысоотношения, позволяющие определять работу внутренних сил в шарнирах текучести пластических механизмов. Для систем, построенных на основе компиляции пластического механизма с упругой конструкцией, вопросы определения работ внутренних сил на упругих перемещениях достаточно тривиальны и будут рассмотрены при решении практических задач.
Деформирование локально загруженной пластины наружной обшивки при образовании бухтины
Рис. 6 Обоснование схемы пластического механизма: а – равномерная нагрузка; б – локальная нагрузка; в – уточненная форма краевого шарнира; г – два типа пластических механизмов;
Нагрузка полагается равномерно распределенной в пределах зоны контакта и характеризуется следующими параметрами:
р – интенсивность нагрузки (давления);
b – высота распределения нагрузки (вертикальный размер зоны контакта).
Окружающее пластину поле наружной обшивки создает условия, исключающие свободные угловые и горизонтальные (в плоскости срединной поверхности) перемещения опорного контура. Условия, накладываемые на угловые перемещения, традиционно характеризуются значениями коэффициентов опорной пары æ1, æ2. Количественная конкретизация ограничений на горизонтальные перемещения, характеризуемые толщинами фиктивных распорных конструкций δ1, δ2, будут рассмотрены ниже.
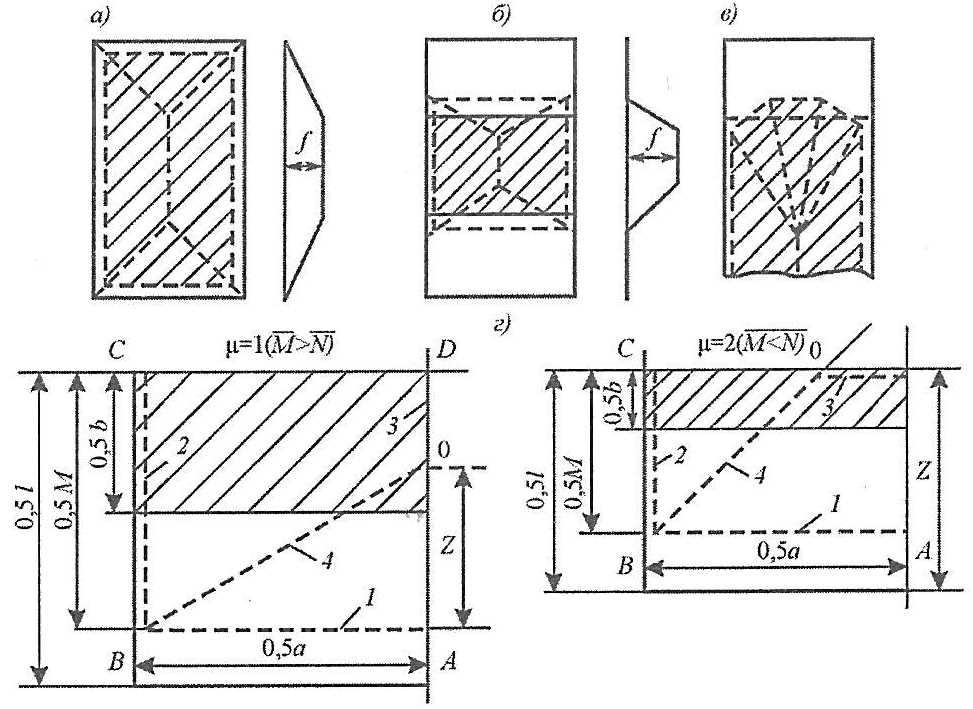
Согласно изложенным в разд. см. “Методы расчета прочности конструкций из жесткопластического материала в геометрически нелинейной постановке” представлениям будем считать, что при реализации предельного состояния и последующем запредельном деформировании в пластине образуется пластический механизм, состоящий из жестких частей, соединенных шарнирами текучести. По аналогии с решениями о предельном равновесии равномерно загруженных пластин (см. рис. 6, а) для рассматриваемого случая нагружения также принимается конвертообразная схема пластического механизма (см. рис. 6, б), в которой, однако, положение краевых шарниров не совпадает с опорным контуром, а определяется в процессе решения. Такая схема пластического механизма хорошо согласуется с наблюдаемыми действительными формами Определение и классифицирование нарушения целостности корпуса судов при дефектациидеформированной поверхности бухтин, локализующихся, как правило, на части площади пластины.
Учитывая изложенное, можно вполне обосновано принять конвертообразную схему пластического механизма в пластине после перехода в предельное состояние. В зависимости от соотношения между параметрами b (высота распределения нагрузки) и а (длина короткой стороны пластины) возможны два варианта ориентации конверта, соответствующих, согласно терминологии п. см. “Основные положения теории предельного равновесия конечномерных систем“, следующим двум типам пластических механизмов, представленных на рис. 6, г (здесь и далее в силу симметрии рассматривается четверть пластины):
Тип 1 (μ = 1), с ориентацией конверта вдоль длинной стороны пластины;
Тип 2 (μ = 2), с ориентацией вдоль короткой стороны.
В геометрически линейной постановке перемещение f осуществляется за счет появления углов слома в шарнирах. Рассматривая задачу в геометрически нелинейной постановке, необходимо учесть, что при конечных перемещениях в шарнирах текучести наряду с углами слома должны появиться удлинения (укорочения) срединной поверхности, компенсирующее изменение геометрии. При этом наблюдается следующая картина. В центральном шарнире 3 (OD), а также в краевом 1 (АВ) и опорном 2 (ВС) шарнирах при наличии окружающего пластину поля наружной обшивки, создающего распорный эффект, имеет место удлинение срединной поверхности.
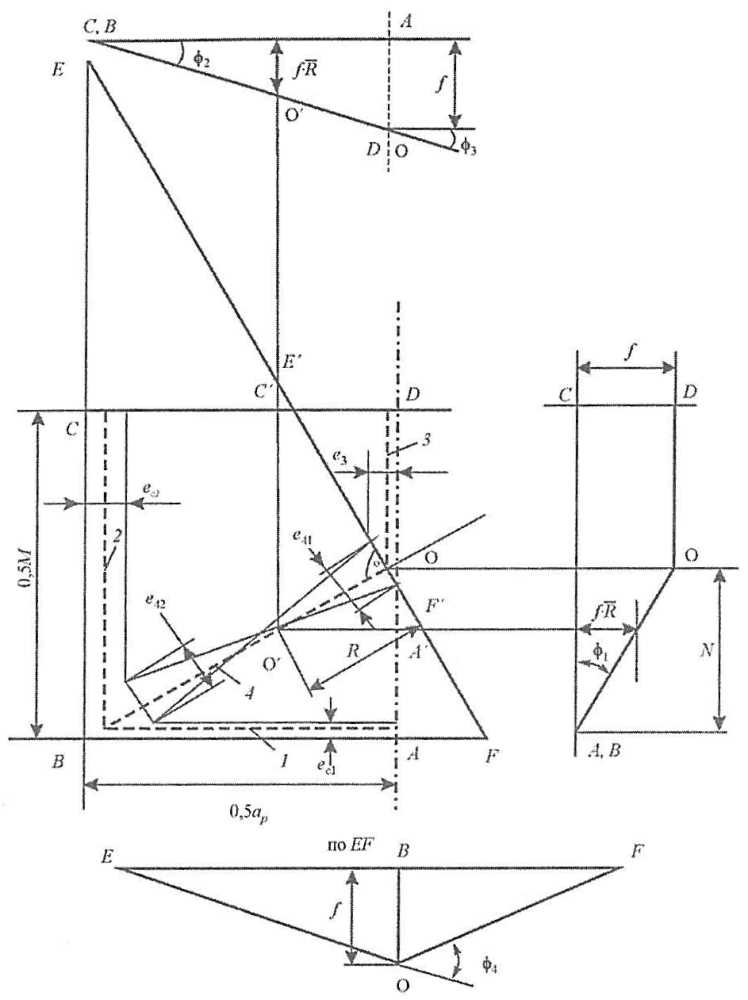
По длине диагонального шарнира 4 (ОВ) деформация срединной поверхности изменяется от максимального удлинения (растяжения) в точке О до максимального укорочения (сжатия) в точке О’. Следовательно, в пределах шарнира ОВ всегда имеется точка О’, в которой деформация срединной поверхности отсутствует (см. рис. 7).
Рис. 7 Геометрия пластического механизма типа
Конструкция и расчет бортовых перекрытийПоявление деформаций и усилий в срединных поверхностях шарниров позволяют пластине воспринимать возрастающую нагрузку после образования в ней пластического механизма, т. е. на запредельной стадии деформирования. При этом важно подчеркнуть, что возможность деформироваться на запредельной стадии пластина сохраняет и в частном случае полного отсутствия распора, поскольку деформации в срединных поверхностях шарниров 3 и 4 возникают независимо от наличия распорных конструкций. Этот эффект, названный А. Р. Ржаницыным самораспором, принципиально отличает реальную пластину от часто применяемой для описания изгиба удлиненных пластин модели балки-полоски. При отсутствии распора балка-полоска не может воспринять нагрузку, превышающую предельную, а реальная удлиненная пластина за счет эффекта самораспора способна воспринять нагрузку, существенно превышающую предельную.
рассматриваемое в качестве независимого параметра.
Перемещения
образуют вектор обобщенных деформаций
Первоначально будем рассматривать работу пластического механизма первого типа (μ = 1), опуская при этом индекс μ для удобства записи. В соответствии с изложенными в п. см. “Описание работы материала в шарнирах текучести” представлениями для рассматриваемого пластического механизма следует полагать, что деформации срединной поверхности в шарнирах малы по сравнению с размерами пластины и могут не учитываться при определении углов слома и длин шарниров текучести. Тогда из геометрических соображений и условий прямолинейности шарниров (см. рис. 7) можно получить:
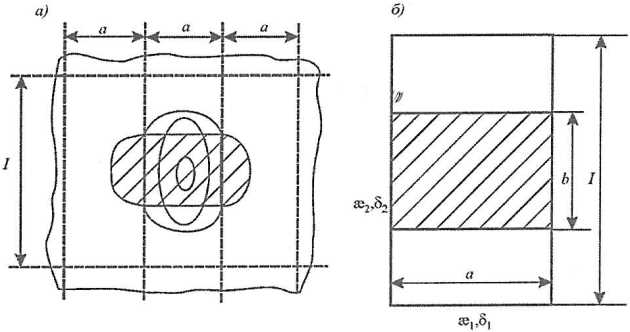
Прежде чем рассматривать деформации в срединной поверхности, конкретизируем ограничения, накладываемые на перемещения пластического механизма в горизонтальной плоскости окружающим его полем наружной обшивки. Для этого воспользуемся результатами исследований Г. В. Бойцова, в которых представлен способ моделирования данных условий путем введения распорной конструкции, а также даны процедуры учета влияния появляющихся в окружающем поле обшивки пластических деформаций. Применительно к рассматриваемой задаче в рамках данного подхода вводятся две изолировано работающие распорные конструкции, накладывающие ограничения на горизонтальные перемещения соответственно краевых (k = 1) и опорных (k = 2) шарниров.
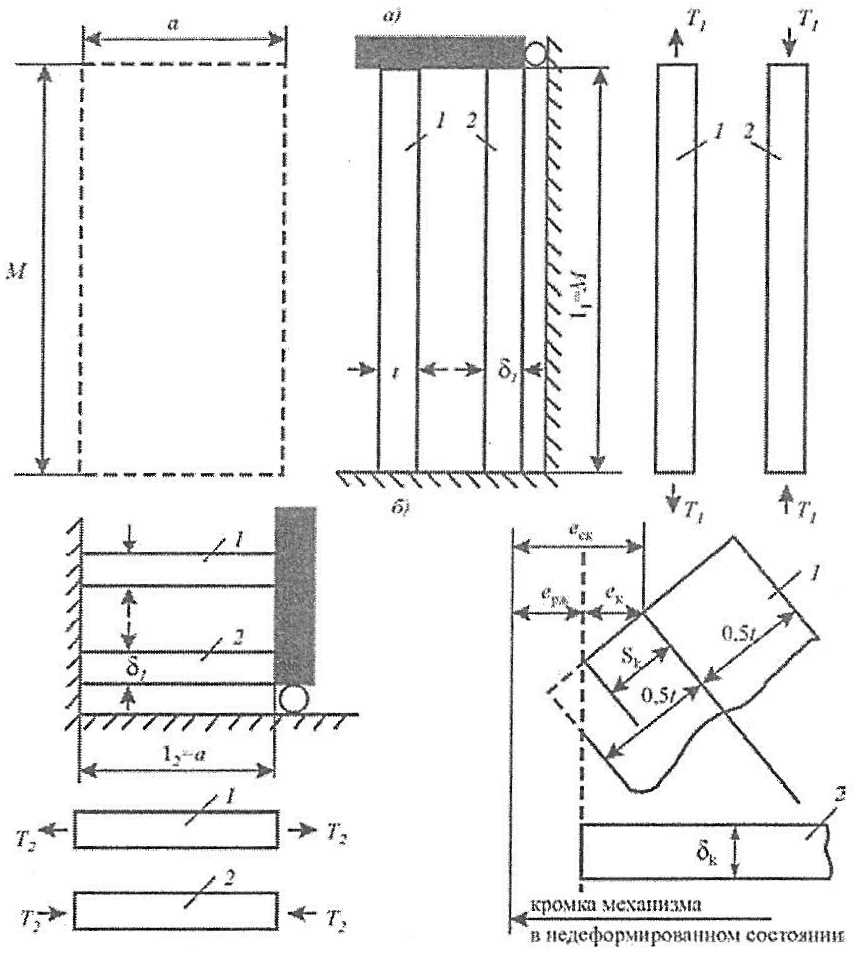
Для описания работы распорной конструкции используются следующие параметры (рис. 8, а):
Рис. 8 Моделирование окружающей пластический механизм наружной обшивки распорными конструкциями. 1 – пластина; 2 – распорная конструкция
Естественно полагать, что ширина распорной конструкции совпадает с длиной соответствующего шарнира текучести, а длина равняется расстоянию между соответствующими противоположными шарнирами, т.е. (см. рис. 8, а)
С учетом (Формула 86) для толщин распорных конструкций получены следующие соотношения:
Из условий прямолинейности шарниров вытекают следующие законы распределения компонентов горизонтальных перемещений по длине шарниров текучести:
где:
х4 – координата, отсчитываемая от точки О’ в направлении точки О шарнира 4 (см. рис. 7);
е41 – удлинение срединной поверхности в точке О (см. рис. 7).
Значения параметров e3, e4, ec1, ec2 находятся из чисто геометрических соображений с помощью построений, представленных на рис. 7, а значения еk и еpkk = 1,2) определяются из условия равновесия системы пластический механизм – распорная конструкция в отношении продольных усилий (см. рис. 8, а)
Итоговые зависимости имеют вид:
где:
– модуль нормальной упругости;
μ – коэффициент Пуассона.
Таким образом, все элементы вектора обобщенных деформаций (Формула 84) выражены через обобщенное перемещение пластического механизма f и элементы вектора координат шарниров текучести r, что позволяет перейти к определению работ внутренних сил. В рассматриваемом пластическом механизме имеют место продольно-изгибные шарниры, для которых величина работы внутренних сил dUшk на элементе длины шарнира dxk определяется согласно зависимости (Формула 77), а величина упругой энергии, накапливаемой на элементе ширины dxk распорной конструкции dUpk, вычисляется с помощью очевидного соотношения
Выполнив ряд преобразований и интегрируя по длине шарниров текучести с учетом переменности S4, найдем работы внутренних сил в шарнирах текучести (в шарнирах 1, 2 – с учетом упругой энергии, накапливаемой в распорных конструкциях) и полную работу внутренних сил системы пластический механизм – распорная конструкция:
где:
при
при
Работа внешних сил на перемещении f пластического механизма V, определяемая тривиально, и суммарная работа внешних и внутренних сил могут быть представлены в виде
где:
Как отмечалось, соотношения (Формула 85) – (Формула 93) справедливы для пластического механизма типа μ = 1 (индекс μ в формулах был опущен). Для пластического механизма μ = 2 с помощью аналогичных преобразований можно получить:
Полученные результаты позволяют перейти к построению разрешающей системы (Формула 50) – (Формула 56) с учетом расширения (Формула 58) – (Формула 61) для системы пластический механизм – упругая (распорная) конструкция. Поскольку уравнения пластичности (Формула 53) и закон ассоциированного пластического течения (Формула 54) удовлетворяются в шарнирах текучести, а уравнения (Формула 51) исключаются в виду наличия только одного обобщенного перемещения, разрешающая система уравнений применительно к рассматриваемой задаче примет вид
где:
– действительный тип пластического механизма.
В результате решения (Формула 95) в соответствии с (Формула 57) для заданного значения обобщенного перемещения f как независимого параметра определяются действительный тип пластического механизма, величины внешней нагрузки и вектор координат шарниров текучести:
Поскольку система (Формула 95) имеет нелинейный характер, для получения устойчивых итерационных алгоритмов ее решения был проведен специальный численный анализ, позволивший установить следующие закономерности.
1Если при некотором малом начальном значении прогиба
получено решение
то при
выполняются следующие условия:
где:
– малое положительное число, определяющее точность численного решения задачи.
Условия (Формула 97) физически означают, что в процессе деформирования конвертообразная форма пластического механизма имеет тенденцию к вырождению в пирамидальную (M = N) без изменения типа пластического механизма. Отметим, что этот теоретический результат согласуется с наблюдаемой в экспериментах картиной: с ростом пластических деформаций деформированная поверхность пластины приобретает пирамидальный характер. 2).
2Ограничения
входящие в разрешающую систему (Формула 95), выполняются автоматически при условии сходимости итерационного процесса ее решения. Нарушение этих условий является признаком расходимости процесса итераций. Поэтому данные ограничения могут быть исключены из формулировки (Формула 95).
т.е. решить задачу в геометрически линейной постановке. Отбрасывая в выражениях для работ внутренних сил все члены, нелинейно зависящие от прогиба, получим:
Тогда разрешающая система уравнений, определяющая тип пластического механизма μ0
, а также предельную нагрузку
и параметры пластического механизма
примет вид
где:
Определение пластического механизма из (Формула 100) позволяет упростить общую разрешающую систему (Формула 95) и привести ее к следующему виду:
Алгоритм решения (Формула 101) включающий выполнение процедур численного дифференцирования и решения систем нелинейных уравнений с помощью итерационных методов, строится в рамках пошагового увеличения прогиба пластины f, как независимого параметра:
На каждом шаге fi в качестве начального приближения итерационного процесса используются результаты решения на предыдущем шаге, а на первом шаге f = fs – результаты решения (Формула 101) (ps, Ms, Ns) дополненные полученным специально аппроксимационным соотношениям для Rs. Алгоритм характеризуется абсолютной сходимостью и малым временем счета, что определяет возможность его использования для выполнения массовых расчетов.
В результате применения алгоритма строятся зависимости (Формула 96), описывающие процесс запредельного деформирования локально загруженной пластины, работающей в составе перекрытия.
Модель упругопластического деформирования пластины при активном нагружении и разгрузке
В полученном решении о запредельном деформировании пластины полностью игнорируются упругая и упругопластическая стадии. Для относительно жестких пластин судов высших ледовых категорий и ледоколов такой подход вполне оправдан. Однако при рассмотрении Наружная обшивка, настил палуб и переборкиработы наружной обшивки судов низших ледовых категорий, а также, что наиболее важно, при построении моделей совместного деформирования пластин с балочными или листовыми конструкциями, игнорирование упругой и упругопластической стадий не является бесспорным.
Достаточно строгие решения, позволяющие описать упругопластическое деформирование пластины в рассматриваемой постановке (геометрическая нелинейность, влияние окружающей обшивки и т.д.) в настоящее время в отечественной практике отсутствуют. Применительно к изгибу удлиненных равномерно загруженных пластин на основе модели балки-полоски получен ряд решений в геометрически нелинейной постановке. В рамках представительного анализа упругопластического изгиба балок-полосок получено достаточно строгое решение, позволяющее проследить процесс деформирования до прогибов порядка 2-3 толщин (дальнейший рост прогибов приводит к расхождению итерационных процедур). В нем показано, что для решения практических задач вполне приемлемо использование приближенного приема, в рамках которого полагается, что сечение может находиться в двух состояниях: либо оно деформируется упруго, либо в нем образуется шарнир текучести. Аналогичный подход использован применительно к анализу конечномерных систем.
В работах автора подробно обоснована правомочность его использования в задачах об упругопластическом изгибе балок и перекрытий.
Обсуждаемый прием, который в дальнейшем будем именовать гипотезой о мгновенном образовании шарнира текучести (ГМШ), физически означает присвоение свойств идеальной пластичности обобщенным деформациям и напряжениям (усилиям) (см. рис. 1, г) и имеет следующую математическую формулировку:
где:
qjT – предельное значение обобщенного напряжения.
Однако в отличие от балок и балочных систем, порядок применения ГМШ в задачах об изгибе пластин с конечным соотношением сторон был не вполне очевиден. Предлагаемая ниже приближенная модель позволяет в определенной мере восполнить имеющийся методологический пробел.
Для описания упругопластического изгиба локально загруженной пластины принимается следующая система допущений:
Деформированная поверхность пластины в допредельной (упругой и упругопластической) стадии представляется в виде совокупности жестких частей, соединенных нежесткими прослойками (рис. 9, а);
Оси нежестких прослоек совпадают с осями шарниров текучести пластического механизма, толщина прослойки равняется толщине пластины, а ширина △k постоянна по длине прослойки и, в отличие от шарнира текучести, конечна по величине;
Прослойки могут существовать в двух состояниях: упругий элемент и шарнир текучести. Тип состояния определяется в зависимости от величины совершаемой в прослойке работы внутренних сил Gk в соответствии со следующими энергетическими условиями:
Рис. 9 Модель работы пластины в упругой а и упругопластической б стадиях; в – схема реальной пластины
– упругие элементы
– шарниры текучести
Введенная система допущений позволяет на основании единой расчетной модели (механизма) описать все стадии деформирования пластины:
упругую – все прослойки в состоянии упругих элементов (упругий механизм, см. рис. 9, а);
упругопластическую – часть прослоек в состоянии упругих элементов, часть – шарниров текучести (упругопластический механизм, см. рис. 9, б);
запредельную – все прослойки в состоянии шарниров текучести (пластический механизм).
Для деформированного состояния модели остаются справедливыми полученные в п. см. “Модель запредельного деформирования пластины” из чисто геометрических соображений выражения для величин
Напряженно-деформированное состояние в упругих элементах описывается с помощью следующих очевидных соотношений:
где:
– изгибные деформации и напряжения в крайней фибре;
Для удобства дальнейшего анализа работу внутренних сил в упругом элементе Нk определим как сумму работ изгибных Ниk и цепных Нцk составляющих, причем в Нцk учтем и энергию распорной конструкции:
где:
ς – коэффициент согласования расчетной модели, порядок определения которого будет изложен ниже.
Решение для упругой стадии деформирования, позволяющее определить зависимость нагрузки от перемещения f упругого механизма, строится на основании принципа возможных перемещений. Входящие в данную зависимость неизвестные значения △k и ς определяются из условий обеспечения идентичности работы упругого механизма и реальной пластины по следующему набору представляющих основной интерес интегральных параметров напряженно-деформированного состояния (при этом в качестве реальной рассматривается пластина с размерами в плане Мх а, упруго защемленная на опорном контуре с коэффициентами податливости æ1 и æ2 и параметрами распорных конструкций δ1, δ2 (см. рис. 9, в):
Соотношения между величинами моментов mk упругого механизма и пластины (в точках k = 1,…,4, указанных на рис. 9, в) подобны;
При одинаковых максимальных прогибах f упругого механизма и пластины выполняются равенства
При формировании условий идентичности учитывалось, что для пластин наружной обшивки ледовых усилений в упругой области основную роль играют изгибные компоненты напряженного состояния, а нелинейные факторы, обуславливающие появление цепных напряжений, проявляются менее существенно. Выражения для величин
получены на основе компиляции и аппроксимации справочных решений. В виду громоздкости этих выражений, а также итоговых соотношений для △k и ς, в настоящей работе они не приводятся.
Механизм остается упругим, пока, в соответствии с (Формула 104), выполняются условия Нk < Uk. При нарушении хотя бы одного из условий начинается упругопластическая стадия, в которой работа внутренних сил определяется на основании соотношения
Решение для упругопластической стадии также строится на основании принципа возможных перемещений.
Введем индекс
– число шарниров текучести в упругопластическом механизме (jс = 0 – упругий механизм). Выполнение условия jс = 4 означает, что все упругие элементы превратились в шарниры текучести, и, следовательно, упрутопластический механизм превращается в пластический, и вступает в силу решение предыдущего пункта о запредельном деформировании пластины.
При построении решения о деформировании пластины на допре-дельной стадии предполагалось, что элементы вектора координат шарниров текучести r известны. Рассмотрим более подробно вопрос определения элементов вектора r.
– нагрузка и прогиб, соответствующие моменту появления первых пластических деформаций (фибровой текучести) в пластине;
– нагрузка и прогиб, соответствующие моменту увеличения числа шарниров в механизме от (jс = 1) до jс.
В упругой области
, как отмечалось, влияние цепных составляющих напряженно-деформированного состояния незначительно, поэтому составляющие вектора r следует принимать в соответствии с линеаризованным решением (Формула 100) для момента реализации предельного состояния:
В виду непрерывности процесса деформирования в момент обращения упругопластического механизма в пластический имеем:
где:
– определяется из решения о запредельном деформировании.
На значения
могут оказывать существенное влияние цепные составляющие деформированного состояния. Таким образом, в течение упругопластической стадии происходил перераспределение вектора координат от
, соответствующего линейному характеру деформирования, k r4, отражающему влияние геометрически нелинейных факторов. Поскольку значения р4 и r4, заранее неизвестны, для описания данного перераспределения r в диапазоне р0 < р < р4 используются последовательные приближения. На первом приближении можно полагать
Полученное решение для упругой и упругопластической стадий открывает возможность для описания процесса разгрузки и определения остаточного прогиба. При рассмотрении разгрузки будем полагать, что из решения задачи об активном нагружении известны зависимости
остается справедливой и на стадии разгрузки, а также, что все образовавшиеся до этого шарниры текучести в момент начала разгрузки превращаются в упругие элементы, т. е. выполняется условие
Введем обозначения:
– остаточный прогиб пластины (в момент полного снятия нагрузки
Процесс разгрузки от некоторого деформированного состояния до состояния
и процесс повторного нагружения до состояния
происходит по единому закону. Поэтому оба этих процесса могут быть описаны с помощью полученного решения для активного нагружения, если в нем прогиб f заменить на параметр △ f
, а также учесть наличие зависимости
и дополнительное условие (Формула 103).
Таким образом, полученное решение в совокупности с решением п. см. “Модель запредельного деформирования пластины” позволяет описать работу пластины на всех стадиях ее деформирования: упругой, упругопластической, запредельной, при разгрузке и повторном нагружении.
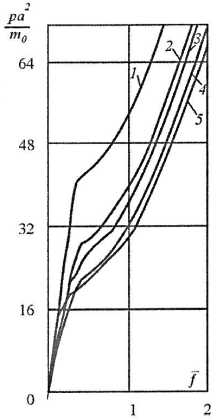
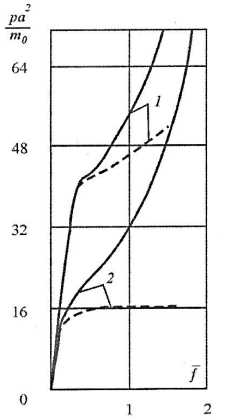
Разработанное на основании этого решения программное обеспечение, благодаря выполненному с целью упрощения разрешающих систем теоретическому анализу, несмотря на нелинейность задачи, характеризуется устойчивостью итерационных процедур и непродолжительностью счета. Для иллюстрации полученного решения на рис. 10 и 11 представлены примеры количественной оценки влияния на работу двух наиболее значимых факторов: степени локализации внешней нагрузки и условий закрепления опорных кромок в отношении горизонтальных перемещений.
Рис. 10 Влияние локализации нагрузки на характер деформирования пластины: 1 – b = 1,5; 2 – b = 3,5; 3 – b = 5,5; 4 – b = 30; 5 – решение для балки-полоскиРис. 11 Влияние условий закрепления опорных кромок на характер деформирования пластины с конечным соотношением сторон и балки-полоски. 1 – пластина, b/a = 1,5; 2 – балка-полоска; kp = 1 (абсолютный распор); – – – – – kp = 0 (распор отсутствует)
Как следует из рис. 10, влияние степени локализации нагрузки, характеризуемой величиной параметра b = b/а, проявляется весьма существенно и в значительно более широком диапазоне, чем принято считать исходя из результатов анализа работы пластин в упругой области. Использование модели балки-полоски при b = 2÷3, традиционно полагавшееся допустимым и при исследовании работы пластины за пределом упругости, согласно полученным результатам приводит к существенному, в 1,5-2,0 раза, занижению действительной несущей способности пластины. Только при b > 20÷30 (т. е. вне реального диапазона изменения данного параметра) полученное решение сближается с решением для модели балки-полоски.
Отметим, что аналогичный результат имеет место и при работе равномерно загруженных пластин с соотношением сторон опорного контура
Поэтому полученное решение целесообразно использовать и применительно к задачам, связанным с воздействием на пластины интенсивных распределенных нагрузок, например, нагрузок от слеминга.
На рис. 11 продемонстрировано влияние на работу пластины условий закрепления опорных кромок пластины (в отношении перемещений в плоскости пластины), традиционно характеризуемых значением коэффициента распора kp (kp = 1 – абсолютный распор, kp = 0 – кромки могут свободно перемещаться). Для модели балки-полоски влияние условий закрепления кромок при kp < 0,5 в процессе развития пластических деформаций приобретает превалирующее значение, поскольку, как отмечалось, при kp = 0 балка-полоска не способна воспринимать нагрузку, большую предельной. Поведение пластины за счет описанного явления самораспора имеет принципиально иной характер.
Она способна воспринимать возрастающую нагрузку вплоть до разрыва материала даже при незакрепленных кромках (kp = 0). Влияние kp на работу пластины в значительной степени нивелируется. Этот вывод имеет важное практическое значение, поскольку, как правило, достаточно точное определение ограничений, накладываемых на перемещения кромок пластины, затруднено.
В цели настоящей работы не входит подробный анализ работы пластин. Однако и изложенные краткие результаты показывают несомненные преимущества полученного решения при описании деформирования пластин с конечным соотношением сторон по сравнению с используемыми упрощенными моделями балки-полоски.