В данном материале систематизированы требования к судовому снабжению и проанализирована работа, которую выполняет якорно-швартовное устройство в различных условиях. Основное внимание уделено расчету динамических нагрузок в цепи, возникающих в момент отрыва якоря от грунта, что позволяет исключить риск обрыва линии и перегрузки механизмов привода.
- Общие сведения
- Снабжение судов якорями, якорными цепями и канатами
- Определение усилий, возникающих в якорной цепи при снятии судна с якоря
- Конструкции якорно-швартовных механизмов
- Шпили
- Брашпили
- Якорные и якорно-швартовные лебедки
- Дистанционная отдача якорей
- Общие принципы расчета электрических шпилей и брашпилей
- Обслуживание якорно-швартовных механизмов
Также детально разбирается «анатомия» палубных механизмов: брашпилей, шпилей и комбинированных лебедок. Проведен сравнительный анализ их конструктивных узлов (фрикционных муфт, ленточных тормозов, редукторов). Рассматриваются технические решения для дистанционного управления отдачей якоря, что требует от механика особого внимания к исправности электрогидравлических систем.
Для инженерного состава представлен алгоритм проверочного расчета электрических приводов, позволяющий оценить запас мощности механизмов. Заключительная часть содержит конкретные рекомендации по регламентному обслуживанию и дефектации узлов, направленные на поддержание безотказной работы оборудования в условиях интенсивной эксплуатации и коррозионного воздействия морской среды.
Общие сведения
Стоянка судов на рейдах и в открытых бухтах обеспечивается с помощью якорей. Подвешенный на канате якорь отдают за борт и благодаря сцеплению его лап с грунтом дна судно противостоит действию течения воды, ветра, волн и т. п. и удерживается на месте. В качестве якорного каната обычно применяют цепь. Швартовку судна, т. е. крепление его у пристаней, набережных и других судов, выполняют с помощью швартовов, в качестве которых используют стальные, растительные или синтетические канаты.
Постановка судна на якорь, Безопасная якорная стоянка суднастоянка на якоре и снятие с него, а также выполнение швартовных операций осуществляются с помощью якорно-швартовных механизмов, которые делятся на:
- шпили,
- брашпили.
Шпили имеют вертикальную ось вращения тяговых органов, брашпили – горизонтальную. У шпиля – одна цепная звездочка и один швартовный барабан (если шпиль звездочки не имеет, он называется швартовным), у брашпиля обычно 2 звездочки и 2 швартовных барабана.
Брашпиль устанавливают в носовой части судна, когда Правила Речного Регистра предусматривают 2 носовых якоря и требуют их одновременного подъема. Если требуется один носовой якорь, то устанавливают более простой, компактный и дешевый механизм – шпиль. Кормовое якорное устройство обычно обслуживается одним кормовым шпилем.
Что такое брашпиль?
Брашпиль – это специальная палубная лебедка с горизонтальным валом, предназначенная для отдачи/подъема якорей и выбирания якорных цепей, а также для швартовных операций.
По роду используемой энергии судовые якорно-швартовные механизмы подразделяются на:
- ручные,
- электрические,
- с приводом от двигателей внутреннего сгорания,
- гидравлические.
Подавляющее большинство судов оборудовано электрическими шпилями и брашпилями. Ручные механизмы применяют на небольших судах. Мотошпилями и брашпилями обычно оборудуют несамоходные буксируемые баржи.
На рис. 1 показана проводка якорной цепи на судне с электрическим брашпилем.
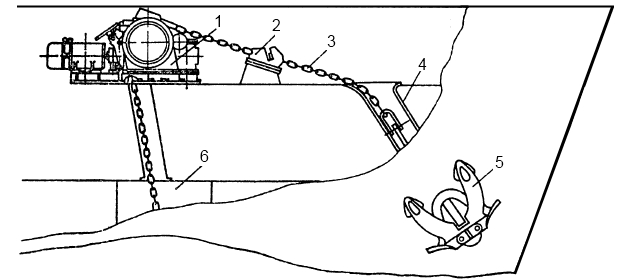
Звездочка брашпиля 1, стопор 2, цепь 3, клюз 4, якорь 5 и цепной ящик 6, включая сам брашпиль, образуют якорное устройство. Якорная цепь, сходящая со звездочки брашпиля, хранится в цепном ящике. Стопоры якорной цепи используются для надежной фиксации цепи, что необходимо для удержания якоря в походном положении, при проведении окрасочных работ и в других эксплуатационных ситуациях. Якорные цепи изготовляют в виде отдельных концов (смычек) длиной по 25 м, которые соединяются между собой специальными звеньями или скобами. Коренной конец якорной цепи должен иметь устройство для его крепления и отдачи. Современные Якорные и швартовные механизмы современных морских судовякорно-швартовные механизмы обычно снабжают устройством для дистанционной отдачи якоря.
Якоря бывают различных типов. Основными из них являются якоря:
- адмиралтейский,
- Холла,
- Матросова.
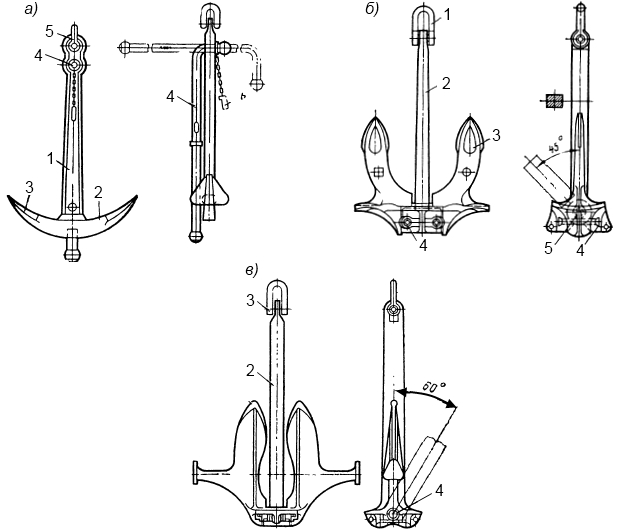
Адмиралтейский якорь (рис. 2, а) состоит из:
- веретена 1;
- рогов 2;
- лап 3;
- штока 4;
- скобы 5;
- чеки 6.
Якорь изображен с убранным штоком, расположенным параллельно веретену.
В таком положении якорь хранится, когда им не предполагают пользоваться. Чтобы якорь мог сцепиться с грунтом, надо шток поставить перпендикулярно веретену и плоскости рогов, закрепив его в этом положении чекой.
Держащая сила всякого якоря практически пропорциональна его массе. Эта сила у адмиралтейского якоря больше, чем у всех прочих систем якорей и составляет:
где:
- mя – масса якоря, кг.
Однако уборка адмиралтейского якоря сложна и отнимает много времени. Кроме того, находящаяся над грунтом лапа якоря на мелководье представляет опасность для проходящих мимо судов и за нее может зацепиться якорная цепь соседнего судна, стоящего на якоре. По этим причинам адмиралтейский якорь на Современные транспортные суда различного назначениятранспортных судах не применяется.
В российском судостроении одобрен для применения бесштоковый якорь с поворотными лапами системы Холла (рис. 2, б). Основными деталями его являются:
- скоба 1;
- веретено 2;
- лапы 3;
- штифты 4;
- штырь 5.
Головная часть якоря отлита заодно с лапами и может вращаться на штыре, пропущенном через отверстие в веретене. Для разворачивания лап при волочении якоря по грунту и для ограничения угла поворота их головная часть имеет приливы. У данного якоря обе лапы входят в грунт одновременно. Держащая сила его в зависимости от характера грунта равна:
Якорь Холла можно легко отдать, быстро убрать и втянуть в клюз, причем эти операции обычно делают дистанционно.
На катерах, СПК и судах малого водоизмещения достаточно широкое применение получил якорь Матросова (рис. 2, в). Якорь состоит из:
- литых (или сварных) лап 1;
- веретена 2;
- скобы 3.
Лапы соединены с веретеном осью 4, в качестве опор которой в коробке лап предусмотрены 2 полукруглые чаши. Для увеличения держащей силы якоря на коробке лап литой конструкции имеются лопатообразные утолщения (приливы), одновременно служащие для ограничения разворота лап. В нижней части лап примерно на расстоянии одной трети их длины от основания проходит шток с фланцами на концах, предохраняющими якорь от опрокидывания.
Рекомендуется к прочтению: Механизмы якорных и швартовных устройств морских судов
Якоря Матросова обладают повышенной держащей силой, равной (6-12)gmя.
К швартовным устройствам относятся:
- швартовные канаты (швартовы);
- кнехты;
- киповые планки;
- роульсы;
- вьюшки для уборки швартовных канатов;
- кранцы;
- швартовные механизмы.
Для выполнения швартовных операций часто применяют лебедки.
Снабжение судов якорями, якорными цепями и канатами
Для того чтобы понять, как определить калибр якорной цепи по характеристике снабжения судна, необходимо обратиться к нормам Речного Регистра РФ. Согласно правилам, масса якорей, а также длина и диаметр звеньев цепей подбираются исходя из типа и класса плавсредства на основе специального расчетного показателя – характеристики снабжения Nс, м2. Эта характеристика выражается формулой:
где:
- L, B, H – соответственно длина, ширина, высота борта судна, м;
- l, h – длина и средняя высота отдельных надстроек и рубок, м;
- k – коэффициент, при Σl > 0,5L равный 1,0; при Σl = (0,25-0,5)L – 0,5; при Σl < 0,25L – нулю.
Для Парусные катамараны Океаниисудов катамаранного типа характеристику снабжения следует определять по формуле:
где:
- Bк – ширина одного корпуса, м;
- T – осадка судна в грузу, м;
- Bс – ширина судна в целом, м.
Значения k те же, что и в формуле 1. Для судов на подводных крыльях, воздушной подушке и глиссирующих судов коэффициент k следует принимать в 2 раза меньше. Подводные крылья при определении характеристики снабжения не учитывают. При отсутствии у данных судов палубы надводного борта надстройкой следует считать часть судна выше нижней кромки оконных вырезов.
Для судов, перевозящих грузы на палубе, Σlh следует вычислять как произведение длины боковой проекции уложенного на палубе груза вместе с ограничивающими грузы конструкциями на его среднюю высоту, а коэффициент k принимать равным 0,5 для судов, предназначенных для перевозки только сыпучих грузов; 1 – для перевозки других палубных грузов.
По характеристике снабжения из таблиц, приведенных в Правилах Речного Регистра РФ, находят число носовых якорей, их суммарную массу и общую длину цепей для судов классов «М», «О», «Р» и «Л». Калибр якорных цепей выбирают из отдельной таблицы в зависимости от массы якоря системы Холла. Кормовым якорем оборудуют самоходные суда с характеристикой снабжения более 1 000 м2 и буксиры-толкачи.
Якорное снабжение судов класса «М – СП» следует принимать по нормам для судов класса «М», при этом масса носовых якорей должна быть увеличена на 20 %, а суммарная длина якорных цепей – на 25 %.
Для Суда на подводных крыльях и воздушной подушкесудов на подводных крыльях, воздушной подушке и глиссирующих судов якорное снабжение берут из специальной таблицы Правил, разработанной применительно к якорям Матросова. На этих судах вместо цепей, как правило, применяют стальные якорные канаты.
Количество и длину швартовных канатов на судне выбирают в зависимости от типа судна и условий плавания. Согласно требованиям Речного Регистра РФ разрывное усилие стального швартовного каната, кН, должно быть не менее:
- для судов с характеристикой снабжения Nс ⩽ 1 000 м2:
- для судов с характеристикой снабжения Nс > 1 000 м2:
По разрывному усилию подбирают стальной канат по соответствующему государственному стандарту. Швартовы для судов смешанного плавания определяют по Правилам Регистра РФ. Усилие в швартове может быть найдено по формуле:
где:
- k0 = 6-8 – запас прочности.
Механизм, предназначенный для выполнения швартовных операций, должен обеспечивать установленную силу тяги Pш и требуемую практикой эксплуатации скорость выбирания швартовов, которая принимается 0,1-0,3 м/с. Нижний предел характерен для судов малого, а верхний – для судов большого водоизмещения при условии исключения ручного труда, связанного с приемом и натягиванием сбегающего со швартовного барабана свободного конца троса. Швартовные механизмы, имеющие ручной привод, имеют малую скорость выбирания швартова (до 0,05 м/с), так как при большей скорости швартовные операции становятся очень тяжелой и трудоемкой работой.
Определение усилий, возникающих в якорной цепи при снятии судна с якоря
Рассмотрим сначала силы, действующие на судно и якорную цепь во время стоянки на якоре (рис. 3, а), затем произведем расчет усилий при снятии судна с якоря.
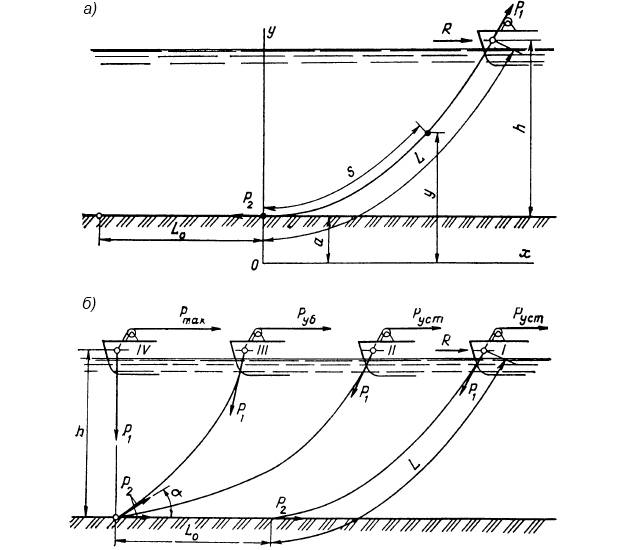
а – при стоянке судна на якоре; б – при снятии судна с якоря
Обозначим равнодействующую сил течения и ветра, действующих на судно до начала якорных операций, R, а усилия в провисающей части цепи у якорного клюза P1 и лежащей на дне части цепи P2. Чем больше R, тем больше длина провисающей части цепи L и тем меньше длина цепи L0, лежащей на дне и помогающей якорю удерживать судно на месте.
Из общих свойств цепной линии известно, что ордината в любой точке ее выражается зависимостью:
где:
- S – длина дуги, измеренная от рассматриваемой точки до наинизшей;
- a – ордината наинизшей точки кривой.
Для точки, расположенной у входа в якорный клюз:
где:
- h – глубина заложения якоря.
Следовательно:
Известно также, что натяжение в любой точке цепной линии равно произведению ординаты этой точки на вес 1 м цепи. Отсюда натяжение цепи у якорного клюза:
а для цепи, лежащей на дне:
где:
- ρв, ρц – соответственно плотности воды и материала цепи (для пресной воды ρв = 1 000 кг/м3, для стальной цепи ρц = 7 800 кг/м3);
- mц – линейная плотность цепи, кг/м;
- 0,87 – поправочный коэффициент, учитывающий потерю веса якоря и цепи в воде.
При наличии на дне горизонтального участка цепи сила натяжения будет направлена горизонтально:
Решая равенство по формуле 3 относительно L, получим:
Фактически принятая длина цепи не должна быть меньше определяемой по формуле 4, в противном случае на дне не окажется горизонтально расположенного участка цепи, что резко ухудшит сцепление якоря с грунтом.
Не меньшее значение для обеспечения надежной стоянки судна имеет конструкция и масса самого якоря. Масса якоря не должна быть менее:
где:
- kд – коэффициент, характеризующий держащие свойства якоря.
Исследуем, как изменяются усилия в якорной цепи в процессе снятия судна с якоря, для чего обратимся к рис. 3, б.
С включением в работу якорно-швартовного механизма, выбирающего верхний конец провисающего участка цепи, судно начинает подтягиваться к месту залегания якоря (переходит из положения I в положение II). В этот период провисающий участок цепи сохраняет свое первоначальное очертание и лишь перемещается в пространстве по направлению к якорю.
Начальный период Уравнения движения суднадвижения судна характеризуется постоянством натяжения якорной цепи и обеспечивает установившийся режим работы механизма с тяговым усилием:
где:
- k = 1,2-1,3 – коэффициент, учитывающий потери на трение цепи в клюзе и стопоре;
- h – расчетная глубина заложения якоря, для малых рек равная 8-10 м; для средних и больших рек – 25 м; для озер и водохранилищ – 75-100 м, для морских рейдов – 150 м и более.
Внешняя нагрузка R, как уже указывалось ранее, есть результат действия на судно течения и ветра. Для винтовых судов ее рассматривают как сумму трех слагаемых:
где:
- Rв – ветровая нагрузка на надводную часть судна;
- Rт – сила течения, действующая на подводную часть корпуса;
- Rг – сила течения, действующая на неподвижные гребные винты.
Результирующая сила ветра:
где:
- kн = 0,5-0,8 – коэффициент обтекания надводной части корпуса (меньшие значения соответствуют судам, имеющим более обтекаемую форму корпуса);
- – давление ветра, Па;
- ρ – плотность воздуха, кг/м3;
- v – скорость ветра, принимаемая для судов внутреннего плавания равной 20 м/с, для судов смешанного плавания – 40 м/с;
- Ωн – площадь проекции надводной части судна на миделевое сечение, м2;
- b, h – соответственно, ширина и высота судовых надстроек, м.
Силу течения можно определить по следующей приближенной формуле:
где:
- ρ, vт – соответственно плотность, кг/м3, и скорость течения, м/с воды;
- kп = 0,3-0,5 – коэффициент обтекания подводной части корпуса;
- Ωп – площадь проекции подводной части судна на миделевое сечение, м2;
- ξ = 0,003-0,004 – коэффициент трения с учетом шероховатости подводной поверхности корпуса;
- Ωсм – площадь смоченной поверхности корпуса судна, м2.
Силу потока воды на Гребные винты малотоннажных судовгребные винты можно ориентировочно вычислить:
где:
- zг – число гребных винтов;
- cг = 200-350 кг/м3 – параметр, увеличивающийся с возрастанием дискового отношения гребного винта;
- Dв – наружный диаметр гребного винта, м.
Продолжительность подтягивания судна к якорю в начальный период (выбирания лежащей на дне цепи):
где:
- v1 – скорость подтягивания.
По окончании установившегося периода дальнейшее подтягивание судна будет сопровождаться увеличением натяжения цепи, которое обозначим Pув, при этом сила P2 изменится не только по значению, но и по направлению (см. положение III на рис. 3). Действуя на якорь под постепенно увеличивающимся углом α и возрастая сама, сила P2 со временем окажется способной преодолеть сцепление якорных лап с грунтом и оторвать якорь.
Правильная оценка силы P1 и необходимого тягового усилия на звездочке для рассматриваемой второй стадии движения судна сопряжена с трудностями. Опыт показывает, что отрыв якоря от грунта происходит после того, как цепь займет отвесное положение IV. Тяговое усилие Pmax на звездочке, возникающее в момент отрыва якоря от грунта:
где:
- mяg – вес якоря;
- mцgh – вес отвесно расположенной цепи;
- 2mяg – сила, удерживающая якорь в грунте, принимаемая равной удвоенному весу якоря.
Формула 6 является приближенной, так как сила удержания якоря в грунте не может быть определена достаточно точно. Однако применение ее на практике вполне себя оправдало.
Продолжительность второго периода подтягивания судна к якорю (переход из положения II в положение III):
где:
- v2 – скорость выбирания якорной цепи.
С отрывом якоря от грунта тяговое усилие на звездочке якорно-швартовного механизма резко уменьшается. В начале третьего периода, т. е.:
- в начале подъема якоря:
- в конце подъема якоря:
Продолжительность заключительного третьего периода, т. е. подъема якоря, составит:
где:
- v3 – скорость выбирания якорной цепи в данный период.
Общая продолжительность снятия судна с якоря:
Для каждого судна эта продолжительность различна и обычно составляет 5-15 мин.
Средняя скорость выбирания якорной цепи за весь период снятия судна с якоря:
где:
- L0 + L – общая длина всей выбранной цепи.
Скорость выбирания якорной цепи:
- для судов внутреннего плавания составляет 0,1-0,12 м/с;
- для судов смешанного плавания – 0,15-0,19 м/с.
На рис. 4 изображен график, показывающий как изменяется тяговое усилие P на звездочке при выбирании якорной цепи.
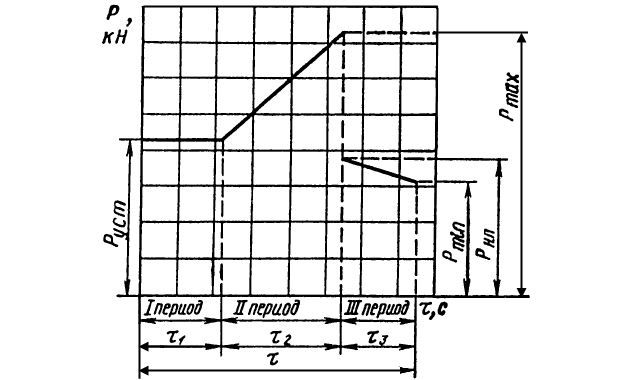
Как видно в период I уборки лежащей на дне цепи, тяговое усилие постоянно, и этот период характеризуется установившимся режимом работы якорно-швартовного механизма. В период II тяговое усилие возрастает до максимального значения и резко снижается в конце периода. В период III оно постепенно уменьшается от Pн. п до Pmin.
Конструкции якорно-швартовных механизмов
Как уже отмечалось, якорно-швартовные механизмы бывают:
- ручные,
- электрические,
- гидравлические,
- с приводом от двигателя внутреннего сгорания.
Рассмотрим некоторые примеры конструкции этих механизмов.
Шпили
Типовой ручной якорно-швартовный шпиль (рис. 5) имеет барабан 12, свободно вращающийся вокруг вертикальной оси – баллера 14, жестко закрепленного на фундаментной плите 19.
Вместе с барабаном отлита звездочка 16, с помощью которой выбирают якорную цепь. Вес барабана воспринимается шайбой 17. В ступицу барабана запрессованы сменные втулки 13 и 15, в которые подается консистентная смазка. Для предотвращения смещения барабана вверх служит гайка 6, сидящая на верхнем конце оси-баллера. На этот же конец оси с помощью шпонки насажена отливка 4, служащая опорой для горизонтального вала 7, проходящего через специальное отверстие в верхней части баллера. По концам горизонтального вала насажены съемные рукоятки 18. Вращение закрепленной на валу ведущей конической шестерни 8 передается ведомой шестерне 1, связанной с верхней торцовой поверхностью барабана. Стопорное кольцо 2 и ведущая коническая шестерня 8 предохраняют горизонтальный вал от возможных осевых сдвигов.
Читайте также: Палубные механизмы и их элементы
Зубчатое зацепление опорных трущихся участков смазывают через отверстия 5 и 9 в крышках, которые вместе с облегченным кожухом 3 закрывают шпиль сверху и предохраняют его от попадания пыли, влаги и мусора. Между верхней торцовой поверхностью барабана и ведомой шестерней находится поддон 10, также защищающий механизм от загрязнения. Под действием силы натяжения швартова барабан может несколько приподниматься. Высота этого подъема не должна быть больше 0,25 мм, так как при большой высоте подъема возможно заклинивание зубчатого зацепления. Регулировочное кольцо 11 служит ограничителем высоты подъема барабана. Для стопорения барабана используются навешенные на пальцы 23 собачки 22, упирающиеся в выступы 20 на фундаментной плите. Заклинивание в ячейках звездочки отдельных звеньев якорной цепи предотвращается отбойником 21.
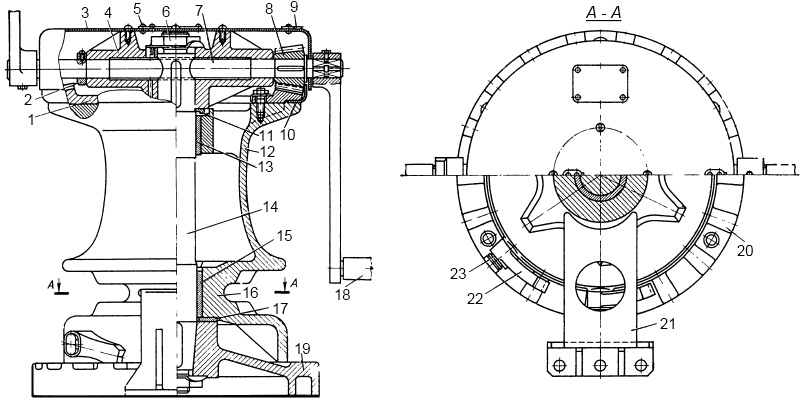
Одна из современных конструкций электрического якорно-швартовного шпиля показана на рис. 6.
На палубе размещается головка шпиля, состоящая из швартовного барабана (турачки) 3 и цепной звездочки 8, вращающихся вокруг неподвижного палубного стакана 7. Барабан и звездочка соединяются между собой кулачковой муфтой 2, включаемой винтовой парой с помощью маховика 5.
Привод шпиля, состоящий из электродвигателя 12 и передач червячной 13 и псевдопланетарной 14, крепится снизу (под палубой) к палубному стакану. Выходной вал псевдопланетарной передачи шлицами связан с пустотелым валом 4, соединяющимся с барабаном зубчатой муфтой 6. Таким образом, при работе электродвигателя барабан всегда вращается, а звездочка вращается только тогда, когда включена муфта 2. При подготовке шпиля к выполнению швартовных операций турачка поднимается из-за ввертывания винта маховика 5 в гайку, запрессованную в торец вала 4, до тех пор пока не выйдут из зацепления кулачки.
Цепная звездочка снабжена шкивом 9 ленточного тормоза, управляемого маховиком 11, встроенным в колонку 10, размещенную на палубе рядом со шпилем. Скоба 1 служит отбойником цепи при ее выбирании.
Судовое палубное оборудование на речном флоте представлено в том числе электрическими якорно-швартовными шпилями, у большинства из которых редуктор и электродвигатель расположены над палубой. Технические данные некоторых перспективных электрошпилей с надпалубным расположением привода помещены в табл. 1.
| Таблица 1. Технические данные электрошпилей с надпалубным расположением привода | ||||
|---|---|---|---|---|
| Технические данные | ЯШ1Р; ЯШ1Р-Д | ЯШ2Р; ЯШ2Р-Д | ЯШ3Р; ЯШ3Р-Д | |
| Тяговое усилие на звездочке, кН | 6,75-8,3 | 14,8 | 25,2-29 | |
| Тяговое усилие на турачке, кН | 6,4-10 | 14-19 | 28-46 | |
| Калибр якорной цепи, мм | 13-17 | 19-24 | 28-34 | |
| Скорость выбирания, м/мин: | цепи | 12,9-5,6 | 10-4,4 | 11,5-5,5 |
| швартовного каната | 11,5-5 | 9-4 | 10 | |
| Диаметр стального каната, мм | 11,5 | 15 | 19 | |
| Окружность каната, мм: | пенькового | 100 | 125 | 175 |
| капронового | 60 | 80 | 90 | |
| Мощность электродвигателя, кВт | 2,2/1,5 | 3,6-2,5 | 7/5,6 | |
| Частота вращения электродвигателя, об/мин | 1 385/590 | 1 390/640 | 1 400/650 | |
| Примечание: Индекс «Д» относится к шпилям с дистанционной отдачей якоря | ||||
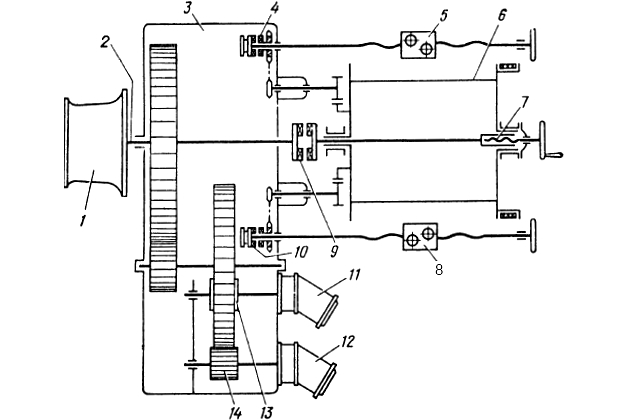
На рис. 7 показана конструкция гидравлического шпиля.
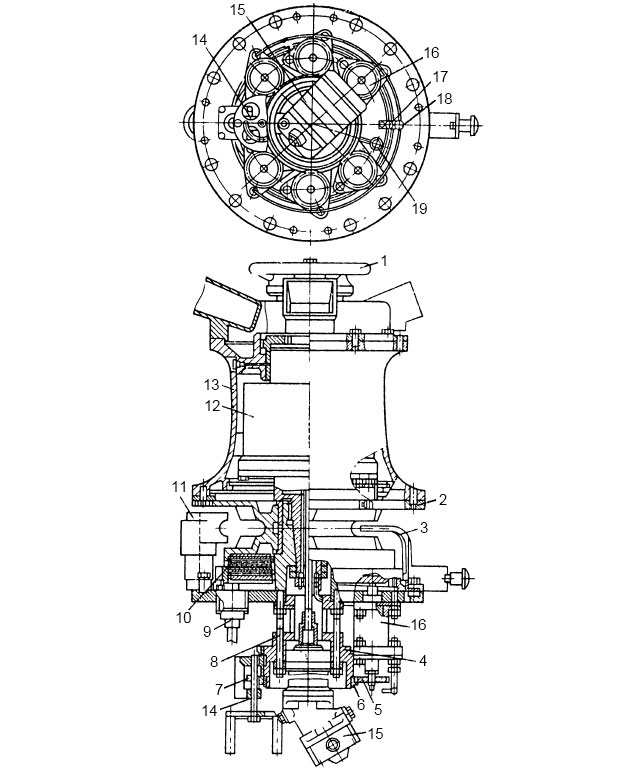
Он состоит из маховика 1 отключения барабана и звездочки от редуктора 12, находящегося внутри барабана 13, к которому болтами прикреплена звездочка 2. Гидродвигатель 15 аксиально-поршневого типа установлен в нижней части шпиля; там же находится ручной привод расторможения 14 звездочки с шестерней 7. В конструкции предусмотрены:
- стяжки 8;
- кронштейн 4 с зубчатым венцом 6 и шестерней 5;
- цепеотбойник 3;
- штуцер 19 слива масла из редуктора;
- дренажный отвод 18;
- штуцер 17 подвода масла к цилиндрам.
Редуктор шпиля двухступенчатый планетарный. Шпиль с дистанционным управлением позволяет с помощью датчика 9 и ограничителя 11 автоматически отсчитывать длину вытравленной цепи, а используя тормозные диски 10 и тормозные цилиндры 16, можно останавливать шпиль в любое время с автоматическим выключением в момент вытравливания полной длины якорной цепи и после входа якоря в клюз. Шпиль может работать от собственного насосного агрегата и от общесудовой гидравлической системы.
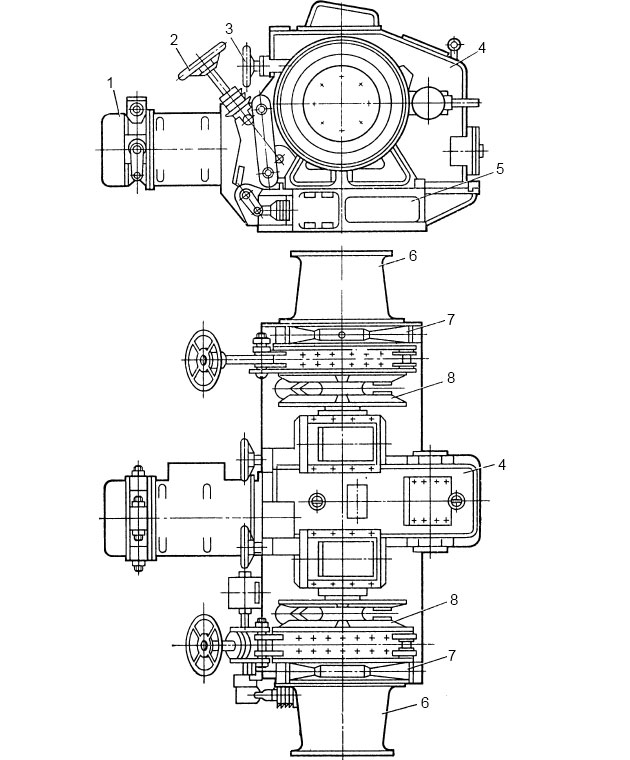
Брашпили
На рис. 8 показана кинематическая схема типового электрического брашпиля Преимущества внутреннего водного транспорта, логистика и правовые особенностисудов внутреннего плавания.
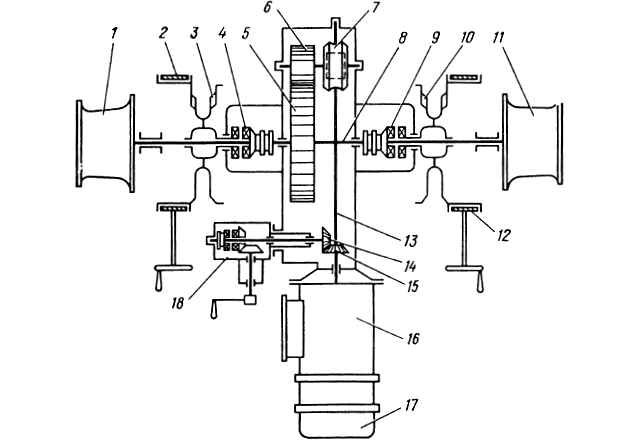
В брашпиле применен червячно-цилиндрический редуктор. Червяк приводится электродвигателем 16, прикрепленным фланцем к редуктору, с помощью длинного валика 13, расположенного в нижней части редуктора. Грузовой вал 8, размещенный над ведущим валом редуктора, приводится колесом 5, зацепляющимся с шестерней 6, сидящей на одном валу с червячным колесом 7. На грузовом валу сидят свободно две цепные звездочки 3 и 10 и жестко насажены турачки 1 и 11. Сцепление звездочек с грузовым валом осуществляется с помощью кулачковых муфт 4 и 9, а торможение – с помощью ленточных тормозов 2 и 12. Электродвигатель снабжен пристроенным дисковым тормозом 17. Для ручного привода предусмотрена колонка 18 с рукояткой, оканчивающаяся конической шестерней 14, зацепляющейся с насаженной на ведущий вал шестерней 15. Колонка обычно располагается в вертикальной плоскости и может быть съемной.
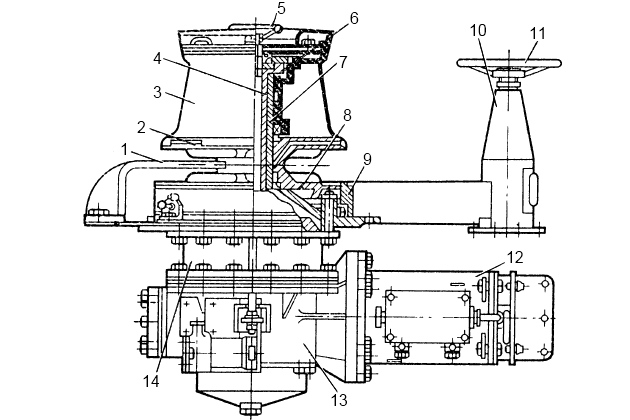
Общий вид электрического брашпиля, спроектированного по этой схеме, показан на рис. 9.
1 – электродвигатель; 2 – привод тормоза звездочки; 3 – привод кулачковой муфты; 4 – редуктор; 5 – фундаментная рама; 6 – швартовный барабан; 7 – подшипник грузового вала; 8 – цепная звездочка
Брашпиль обеспечивает раздельную работу звездочек левого и правого бортов. Отдача якоря осуществляется дистанционно. При помощи турачек совершаются швартовные операции. Швартовные барабаны сидят на валу жестко и всегда вращаются при включенном двигателе. Технические данные электрических брашпилей приведены в табл. 2.
| Таблица 2. Технические данные электрических брашпилей | |||||
|---|---|---|---|---|---|
| Технические данные | Б1Р | Б2Р | Б3Р | Б5 | |
| Тяговое усилие на звездочке, кН | 7,8-11,8 | 14,8-21 | 30-47 | 50,9 | |
| Калибр якорной цепи, мм | 15-19 | 19-25 | 28-34 | 37-40 | |
| Скорость выбирания, м/мин: | якорной цепи | 10-5 | 9,6-4,2 | 10,7-4,5 | 12-5,5 |
| швартовного каната | 11-4,8 | 8-3,9 | 8-3,6 | 13,3-6,2 | |
| Окружность каната, мм: | пенькового | 100 | 125 | 175 | 200 |
| капронового | 60 | 80 | 90 | 115 | |
| Мощность электродвигателя, кВт | 2,2/1,5 | 3,6-2,5 | 7/5,6 | 15 15/4,2 | |
| Частота вращения электродвигателя, об/мин | 1 385/590 | 1 390-640 | 1 400/650 | 1 410 650/310 | |
Мотобрашпили (мотошпили) содержат в основном те же элементы, что и электрические механизмы. Однако поскольку ДВС в отличие от электродвигателя не может быть пущен под полной нагрузкой, то у мотомеханизмов вместо обычных эластичных муфт применяются фрикционные муфты с приводом для их выключения (при запуске двигателя) и включения.
Якорные и якорно-швартовные лебедки
На судах на подводных крыльях в состав Подготовка якорного устройства и отдача якоряякорного устройства входит якорная лебедка с барабаном для стального или капронового каната. Для лебедки применяют гидродвигательный привод, отличающийся малыми габаритными размерами и массой, и удобный при пользовании лебедкой. Устройство такой лебедки можно понять из рис. 10, а.
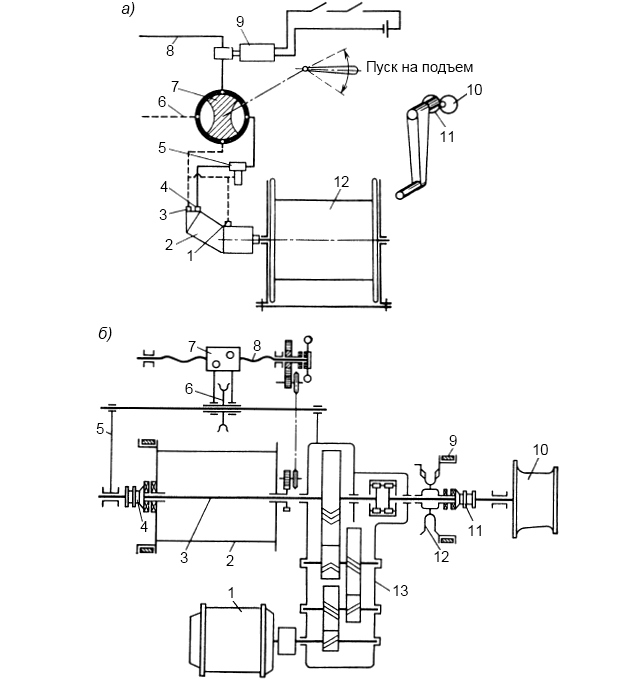
а – принципиальная схема; б – схема управления якорно-швартовной лебедкой
Жидкость для питания гидродвигателя отбирается из общей распределительной колонки гидросистемы через запорный клапан, который открывается только на период работы по подъему якоря. В трубопровод 8, подводящий рабочую жидкость, включен блокировочный электромагнитный распределитель 9. Он перекрывает подачу жидкости к манипулятору 7, если рукоятка ручного привода окажется установленной на лебедке. Неубранная рукоятка при включении гидродвигателя может быть причиной серьезных травм. Поэтому при вставленной рукоятке в отверстие 11 откинутая крышка 10, нажимая на штифт конечного выключателя, размыкает цепь электропитания распределителя. В обесточенном состоянии он перекрывает трубопровод 8.
Управление гидродвигателем (пуск, остановка, регулирование скорости подъема якоря) осуществляют при помощи манипулятора 7. Для защиты лебедки от перегрузки по крутящему моменту на барабане 12 после манипулятора перед гидродвигателем включен предохранительный клапан 5. Жидкость поступает в гидромотор через штуцер 4. По трубопроводу 6 через штуцер 3 жидкость сливается в гидробак 2. Утечки от гидродвигателя отводятся через штуцер 1.
Предлагается к прочтению: Брашпили и шпили: конструкции и принципы работы
Судовое якорно-швартовное устройство – электрическая якорно-швартовная лебедка (рис. 10, б) состоит из двигателя 1 и трехступенчатого цилиндрического редуктора 13, на грузовом валу 3 которого свободно размещен швартовный барабан 2 и якорная звездочка 12, а на шпонке – турачка 10. Звездочка служит для выбирания якоря, швартовка проводится с помощью каната, наматываемого на барабан; турачка предназначена для выполнения вспомогательных операций. Барабан и звездочка снабжены ленточными тормозами 5 и 9, а для сцепления с грузовым валом у них предусмотрены кулачковые соединительные муфты 4 и 11. Канат с помощью канатоукладчика 7, приводимого винтом 8, укладывается на барабан в несколько слоев. Канатоукладчик расположен в основании лебедки и для предотвращения перегиба на нем каната установлен отводной ролик 6, с которого канат поднимается на барабан. Этот ролик связан с кареткой и передвигается вместе с ней.
Швартовные лебедки часто выполняют автоматическими, в особенности на морских судах. Наиболее простыми и гибкими получаются автоматические швартовные лебедки с гидроприводом. Одна из возможных схем электрогидравлической швартовной лебедки показана на рис. 11.
Она состоит из:
- барабана 6, снабженного ленточным тормозом;
- двухступенчатого цилиндрического редуктора 3;
- турачки 1.
Колесо первой ступени редуктора зацепляется с двумя шестернями 13 и 14, приводимыми каждая своим аксиально-поршневым гидродвигателем 11 и 12 соответственно. Турачка сидит на грузовом валу 2 жестко, а барабан соединяется с этим валом кулачковой муфтой 9, управляемой винтовым механизмом 7. Лебедка снабжена двумя канатоукладчиками 5 и 8, каждый из которых может включаться своим кулачковым механизмом 4 или 10.
В процессе Судовые гидравлические траловые лебедкиработы лебедки с ручным управлением при действии в канате номинального тягового усилия включены оба гидродвигателя, питаемые маслом от специального насоса с электроприводом. На режиме выбирания ненагруженного каната один гидродвигатель отключается, а второй при той же производительности насоса работает с большим расходом масла, а следовательно, при большей частоте вращения.
На автоматическом режиме масляный насос отключается и при выбирании каната, когда его натяжение сделается меньше заданного, гидродвигатели питаются от масляной аккумуляторной батареи со сливом масла в пневмобак. Когда натяжение швартова становится больше заданного, канат травится и, вращая барабан, раскручивает гидродвигатели в обратном направлении, переводя их в насосный режим работы. При этом масло из пневмобака перекачивается в аккумуляторную батарею, которая на этом режиме заряжается.
Настройка лебедки на разное тяговое усилие при работе в автоматическом режиме осуществляется изменением давления масла в напорной магистрали.
Дистанционная отдача якорей
Согласно требованиям Правил Речного Регистра РФ на всех грузовых судах длиной более 60 м должна быть предусмотрена дистанционная отдача правого носового якоря с поста управления судном с помощью одного органа управления. На толкачах должна осуществляться с поста управления судном дистанционная отдача правого носового и кормового якорей. В рубке данных судов требуется установка приборов, указывающих длину вытравленной цепи якорей. Система дистанционной отдачи якорей должна обеспечивать возможность остановки якорной цепи при любой вытравленной ее длине. Продолжительность отдачи якоря не должна превышать 15 с с момента включения устройства дистанционной отдачи якоря.
Обычно дистанционная отдача якоря осуществляется с помощью электрогидравлической системы. Принципиальная схема такой системы показана на рис. 12.
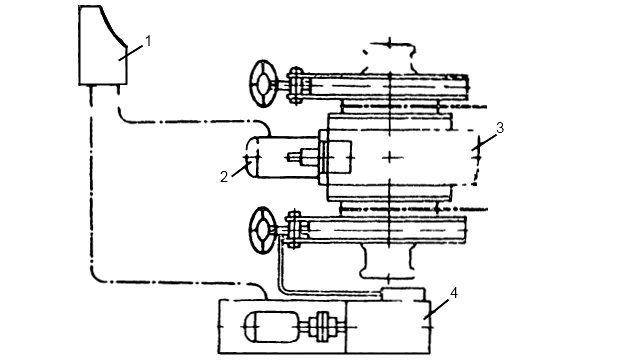
С постом управления 1 соответственно связаны электродвигатель 2 брашпиля 3 и насосный агрегат дистанционной отдачи якоря 4. Насосный агрегат (электродвигатель, спаренный с насосом) создает давление рабочей жидкости в гидравлическом приводе тормозов брашпиля. Такую схему применяют на теплоходах, где расстояние от насоса до рубки значительное (несколько десятков метров). Электрическая система позволяет с пульта управления контролировать длину вытравленной якорной цепи, периодически замедлять или останавливать ее движение. Пульт встроен в общий пост управления судном. Время отдачи и затяжки ленточного тормоза брашпиля с помощью данной системы составляет 3-4 с. Точность показаний приборов контроля якорной цепи ±1,5 м. Опыт эксплуатации судов, оборудованных по указанной схеме, подтвердил ее эффективность.
Общие принципы расчета электрических шпилей и брашпилей
По характеристике снабжения Nс (см. формулу 1) находят по Правилам Регистра РФ массу якорей, длину и калибр d якорных цепей. Глубина заложения якоря h обычно бывает известной. Как уже указывалось ранее, фактически принятая длина цепи не должна быть меньше определяемой по формуле 4.
Рассчитывая якорно-швартовное устройство необходимо знать моменты, которые должен развить двигатель при снятии судна с якоря. Используя зависимости, приведенные в п. «Определение усилий, возникающих в якорной цепи при снятии судна с якоря», можно написать для моментов следующие выражения:
- при подтягивании судна к якорю:
- при отрыве якоря от грунта:
- в начале подъема якоря:
- в конце подъема якоря:
где:
- Dт. о – расчетный диаметр якорной звездочки, определяемый по формуле «Судовые рулевые машины – классификация, расчет и основы эксплуатацииРасчет диаметра тягового органа, выполненного в виде звездочки»;
- i – передаточное число механизма;
- η – КПД механизма, зависящий от типа и числа установленных передач между валом двигателя и главным валом механизма.
Кроме того, при швартовных операциях тот же двигатель должен развивать момент:
где:
- Dшв – диаметр швартовного барабана, равный (400-500)dпр, причем dпр – диаметр проволоки швартовного каната;
- dшв – диаметр швартовного каната.
При подборе электродвигателя якорного механизма исходят из номинального момента Mном и номинальной частоты вращения nном. Номинальный момент принимают в виде некоторой части от Mmax.
Подход к определению номинального момента на звездочке якорно-швартовного механизма несколько изменился. Его находят по номинальной нагрузке Pном, в основе расчета которой лежат следующие соображения.
Будет интересно: Управление судном при постановке и съемке с якоря и бочек
Основным режимом работы якорно-швартовного механизма принимается подтягивание судна к якорю, которое составляет большую часть общего времени снятия судна с якоря. На основании этого нагрузку на цепь, соответствующую такому режиму, принимают за номинальное тяговое усилие на якорной звездочке и кладут в основу расчета механизма; по такой нагрузке подбирают также и электродвигатель.
На основе расчетов сопротивления подтягиванию и большого количества экспериментальных материалов номинальная нагрузка представляется в функции от калибра цепи d, мм, в виде:
где:
- a – удельное тяговое усилие на цепной звездочке;
- m – коэффициент, учитывающий группу прочности цепи.
Для якорно-швартовных механизмов судов внутреннего плавания при калибре цепи 14-34 мм принимают a = 23 МПа; m = 0,8 для цепи без распорок и равным 1 для цепи с распорками. Номинальный момент на валу электродвигателя будет:
Таким образом, зная калибр цепи, можно легко найти номинальное тяговое усилие на звездочке, а затем и номинальный момент на валу электродвигателя. Но калибр цепи всегда известен уже в начальной стадии проектирования судна, ибо он, как и другие параметры (масса якоря, длина цепи и т. п.), однозначно определяется характеристикой якорного снабжения Nс.
Номинальную частоту вращения электродвигателя находят по выражению:
где:
- vср – средняя скорость выбирания якорной цепи, принимаемая не менее 7 м/мин.
Номинальная мощность электродвигателя, кВт:
По найденным значениям Nном и nном подбирают электродвигатель по каталогу.
Обслуживание якорно-швартовных механизмов
В данном пункте приведены некоторые требования техники безопасности при эксплуатации якорных механизмов на морских судах. Выполнение якорных и швартовных операций требует от Обучение и подготовка персоналаобслуживающего персонала строгого соблюдения определенной последовательности действий и правил техники безопасности. К проведению этих операций допускаются члены судового экипажа, прошедшие специальную подготовку и получившие соответствующие навыки под руководством опытных должностных лиц.
Правильная эксплуатация судовых механизмов требует, чтобы брашпиль и шпиль обслуживались строго по инструкции, которая обычно содержится в паспорте изделия.
В процессе подготовки брашпиля (шпиля) к работе необходимо убедиться в его исправности. Убрать посторонние предметы, мешающие работе механизма и движению каната (цепи). Смазать трущиеся поверхности, привести в рабочее состояние масленки и проверить наличие масла в редукторе. Проверить срабатывание тормозов, привода дистанционной отдачи якоря, действие кулачковых (зубчатых) муфт. Обнаруженные дефекты необходимо устранить.
Во время действия брашпиля (шпиля) нужно следить за тем, чтобы трущиеся поверхности были смазаны и не появлялись ненормальные стуки в механизме. При обнаружении неисправности механизм должен быть остановлен для выяснения и устранения причин ненормальной его работы. Запрещается касаться руками расторможенной якорной цепи и поправлять якорь во время втягивания его в клюз при невыкаченном стопоре.
При швартовке судна не должно быть людей в зоне натянутого каната. В случае чрезмерного натяжения каната при рывке в процессе швартовки судна надо несколько ослабить канат, обеспечив его пробуксовку («стравливание») через швартовный барабан брашпиля (шпиля).
Перед началом подъема якоря и особенно перед швартовными операциями член судового экипажа, выполняющий их, должен предварительно убедиться в исправности действия механизма опробованием «вхолостую» и только после этого, доложив старшему по вахте, что механизм в порядке, приступить к работе.
В походном положении якорная цепь должна находиться в цепном ящике, винтовые стопоры замкнуты, звездочки на брашпиле разъединены от кулачковой муфты, но заторможены ленточным тормозом. Швартовный канат должен быть сложен в бухту на специальной решетке или намотан на вьюшку.
Отдают, поднимают якорь и выбирают швартовный канат только по команде вахтенного начальника судна. При приближении якоря к клюзу в процессе его подъема надо уменьшить скорость цепи, чтобы избежать сильного удара и связанных с этим последствий.
Якорно-швартовные механизмы требуют регулярного технического обслуживания независимо от частоты пользования ими. Техническое обслуживание электродвигателей и электроаппаратуры проводится в соответствии с инструкцией по их уходу.

- Александров М. Н. Судовые устройства. Л.: Судостроение, 1968. 372 с.
- Аристов Ю. К. Судовые вспомогательные механизмы и системы. М.: Транспорт, 1985. 288 с.
- Богомольный А. Е. Судовые вспомогательные и рыбопромысловые механизмы. Л.: Судостроение, 1980. 336 с.
- Воронов В. Ф., Арциков А. П. Судовые гидравлические машины. Л.: Судостроение, 1976. 302 с.
- Валдаев М. М. Гидравлические приводы судовых палубных механизмов. Л.: Судостроение, 1973. 296 с.
- Войткунский Я. И., Першиц Р. Я., Титов И. А. Справочник по теории корабля. Л.: Судостроение, 1973. 512 с.
- Жмудь А. Е. Винтовые насосы с циклоидальным зацеплением. М.-Л.: Машгиз, 1963. 156 с.
- Женовак Н. Г. Судовые винтовые негерметичные насосы. Л.: Судостроение, 1972. 144 с.
- Завиша В. В., Декин Б. Г. Судовые вспомогательные механизмы и системы. М.: Транспорт, 1984. 358 с.
- Камнев Г. Ф., Кипарский Г. Р., Балин В. М. Подъемно-транспортные машины и палубные механизмы. Л.: Судостроение, 1976. 312 с.
- Краковский И. И. Судовые вспомогательные механизмы. М.: Транспорт, 1972. 384 с.
- Ломакин А. А. Центробежные и осевые насосы. М.-Л.: Машиностроение, 1966. 364 с.
- Певзнер Б. М. Насосы судовых установок и систем. Л.: Судостроение, 1971. 383 с.
- Петрина Н. П. Судовые насосы. Л.: Судостроение, 1962. 376 с.
- Правила классификации и постройки судов внутреннего плавания/Речной Регистр РСФСР. М.: Транспорт, 1984. Т. 3. Ч. VIII.
- Сизов Г. Н., Аристов Ю. К., Лукин Н. В. Судовые насосы и вспомогательные механизмы. М.: Транспорт, 1982. 303 с.
- Сторожев Н. Ф. Судовые сцепные устройства. М.: Транспорт, 1978. 272 с.
- Чиняев И. А. Насосные установки танкеров и плавучих нефтестанций. М.: Транспорт, 1968. 112 с.
- Чиняев И. А. Эксплуатация насосов судовых систем и гидроприводов. М.: Транспорт, 1975. 160 с.
- Чиняев И. А. Роторные насосы: Справочное пособие. Л.: Машиностроение, 1969. 216 с.
- Чиняев И. А. Лопастные насосы: Справочное пособие. Л.: Машиностроение, 1973. 184 с.
- Чиняев И. А. Паровые насосы. Л.: Машиностроение, 1980. 189 с.
- Чиняев И. А. Поршневые кривошипные насосы. Л.: Машиностроение, 1983. 176 с.
- Чиняев И. А. Судовые системы. М.: Транспорт, 1984. 216 с.
- Чиняев И. А. Судовые вспомогательные механизмы. М.: Транспорт, 1989. 295 с.
- Шмаков М. Г. Судовые устройства. М.: Транспорт, 1977. 279 с.
- Юдин Е. М. Шестеренные насосы. М.: Машиностроение, 1964. 236 с.





